
5.6.1 Basics of Room Acoustics
Most of the techniques presented in previous sections have concentrated on reproducing one sound source in a free field from a certain direction. However, in a real space reverberation is always present. Reverberation is composed of reflections which are delayed and attenuated copies of the direct sound. The frequency content of each reflection is also modified due to the directivity of the sound source and due to the material absorption of reflecting surfaces.
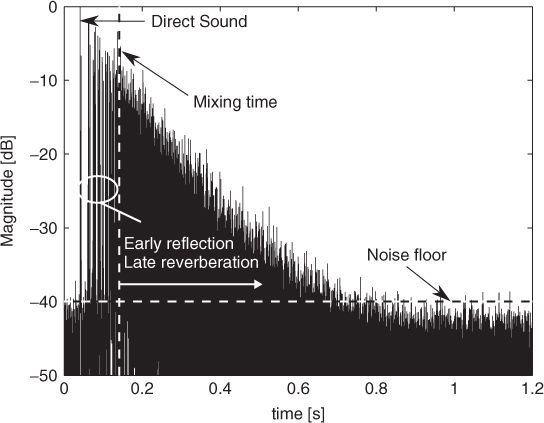
The most important concept in room acoustics is an impulse response which describes the acoustics of a room from a static sound source to a listening position. Engineers often divide the impulse response into three parts, the direct sound, early reflections and late reverberation. This division is illustrated with a simulated impulse response in Figure 5.11. The direct sound is the sound reaching the listener first. The early reflections are the first reflections that are not perceived separately as human hearing integrates them with the direct sound. Although their individual directions are not perceived due to the precedence effect, they contribute to the perception of the sound color and the size of the sound source, as well as the size of the room. Late reverberation is considered after a time moment, which is sometimes called the mixing time, when the reflection density is so high that individual reflections cannot be seen in the response. Late reverberation gives cues of the size of the room as well as the distance of the sound source.
Figure 5.11 Simulated room energy response illustrating the direct sound, early reflections and late reverberation.
The room impulse response can be measured [MM01] or modeled with room acoustics modeling techniques [SK02, Sil10]. Section 5.7 presents various ways to create the impulse response, but before that the basic method to add the room effect to a sound signal is presented.
5.6.2 Convolution with Room Impulse Responses
If the impulse response of a target room is readily available, the most faithful reverberation method would be to convolve the input signal with such a response. Direct convolution can be done by storing each sample of the impulse response as a coefficient of an FIR filter whose input is the dry signal. Direct convolution becomes easily impractical if the length of the target response exceeds small fractions of a second, as it would translate into several hundreds of taps in the filter structure. A solution is to perform the convolution block by block in the frequency domaing given the Fourier transform of the impulse response, and the Fourier transform of a block of input signal, the two can be multiplied point by point and the result transformed back to the time domain. As this kind of processing is performed on successive blocks of the input signal, the output signal is obtained by overlapping and adding the partial results [OS89]. Thanks to the FFT computation of the discrete Fourier transform, such a technique can be significantly faster. A drawback is that, in order to be operated in real time, a block of N samples must be read and then processed while a second block is being read. Therefore, the input–output latency in samples is twice the size of a block, and this is not tolerable in practical real-time environments.
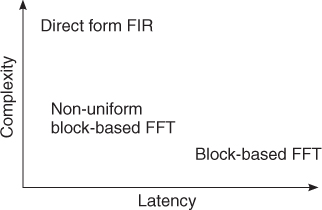
The complexity–latency tradeoff is illustrated in Figure 5.12, where the direct-form and the block-processing solutions can be located, together with a third efficient yet low-latency solution [Gar95, MT99]. This third realization of convolution is based on a decomposition of the impulse response into increasingly large chunks. The size of each chunk is twice the size of its predecessor, so that the latency of prior computation can be occupied by the computations related to the following impulse response chunk. Details and discussion on convolution were presented in Section 2.2.7.
Figure 5.12 Complexity vs. latency tradeoff in convolution.
When the reproduction is monaural the convolution is a trivial task, but when spatial sound reproduction is applied the process is more complicated. In real life the reflections reach the listening position (or a microphone) from all directions and the reflections can be considered to be virtual sources (discussed in previous sections). Thus, each reflection should be reproduced from the correct direction, which means that the impulse response has to contain such information. Currently, the most common technique is to measure or model the first or higher-order B-format response that is convolved with source signals. Then the reproduction with multi loudspeaker setups is performed with spatial-sound rendering techniques (see Sections 5.5.4 and 5.5.7).