10
Project Treble: Binderized HAL
The Android system and its use of the HAL received a major overhaul starting with Android 8.0. Internally, this was called Project Treble and its goal was not only to provide a standard abstraction to the underlying hardware, but to do it in a way that allowed vendors to upgrade the core OS without requiring a rebuild of HAL libraries and the system image. This means Google can roll out OS updates without requiring modifications to the vendor proprietary components. Binderized HALs must be used for Android 8.0 and newer. This new, extremely flexible, and forward-looking approach to the HAL requires some knowledge of Android’s Binder subsystem.
The platform vendor–supplied HAL is no longer a set of shared libraries following a specific naming convention and binary API. Instead, the vendor exposes a set of binder interfaces to the system and one or more backing services that host the HAL implementation. The HAL interfaces are defined using HIDL (pronounced “hide-l”), a language similar to the AIDL, used to define binder service interfaces.
This chapter explores the architecture of the binderized HAL and examines how Android uses it. We’ll dig into an existing binderized HAL definition from the platform and explain how the pieces fit together.
Note
Unless otherwise noted, the remainder of this chapter uses HIDL when referring to the binderized HAL architecture, not just the interface definition language.
HIDL Architecture
The HIDL-based system is built upon the same concepts as Android’s system services model. Each HAL implementation is backed by a service, running in user-space, that exposes a HIDL-defined interface. The HIDL services, usually native processes, are started at system startup and register with the system. Each HIDL interface is versioned so the system understands what is available at runtime. This allows the platform to support one or more interface versions for a specific hardware component, which is important for devices being upgraded to new versions of the OS.
The key feature of this architecture is that the vendor-provided HIDL components are separated from the core Android system, allowing the core OS to be updated without requiring the vendor to provide new custom libraries. The end result is a robust system that allows vendors to adopt new releases of Android for existing hardware with minimal friction.
Just like the Android system service architecture, the HIDL framework includes a hardware service manager, appropriately named hwservicemanager. This system daemon acts as the registrar of all HIDL-based HALs in the system. It can be thought of as the name server for HIDL-defined interfaces in the system. Each HIDL component initializes and registers its Binder-based interface(s) with hwservicemanager, making them available to other components in the system. Other processes in the system find the HIDL binders by making requests to hwservicemanager for a specific HIDL. Figure 10.1 shows the overall architecture.
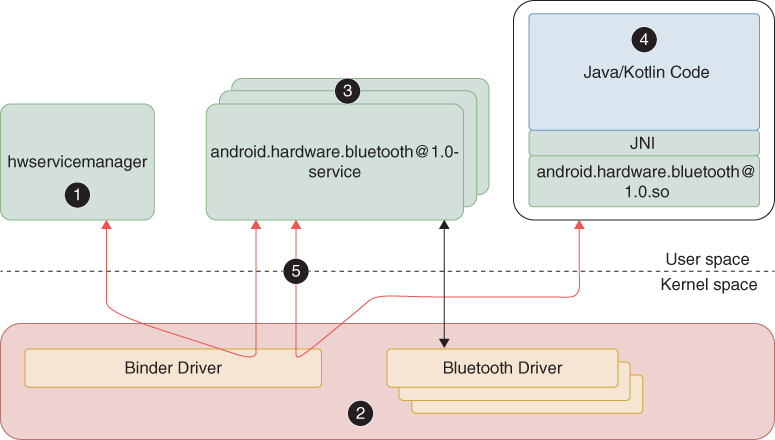
Figure 10.1 HIDL High-Level Architecture
In Figure 10.1, the numbered components are defined as follows:
hwservicemanager, the central registrar of HIDL services in the systemThe Linux kernel with the Android Binder IPC driver and other hardware drivers within it
The HIDL services in the system, providing the HAL implementation(s) for their respective hardware components
The client application process that utilizes the Binder-exposed HIDL services
The binder that connects the client and backing HIDL service processes
Although Android 8.0 and newer requires the use of HIDL, a small handful of exceptions exist: some HALs are provided in what is called “passthrough” mode or are specialized same-process HALs (SP-HALs). The passthrough HALs are effectively HIDL wrappers around legacy or conventional HAL libraries that allow those libraries to be used in the same process. Other SP-HALs may not even expose HIDL-defined interfaces.
Note
Google strictly controls which HALs are SP-HALs, and there are no exceptions for new devices rolling out Android 8.0 or newer. This includes vendor extension HALs. Devices that are upgrades to Android 8.0 are given some leniency with vendor extensions. Otherwise, all other Android-defined binderized HALs must be binderized for Android 8 or newer running on the platform.
You can find more details about the HIDL architecture at https://source.android.com/devices/architecture/hidl.
hwservicemanager
As previously stated, hwservicemanager is a central component of the HIDL architecture. Similar to the system services Binder subsystem’s registrar, servicemanager, this component keeps a registry of active HIDL components in the system by HIDL interface, version, an optional name, and the backing binder interface/object exposed by the component. This binder object can then be found and requested by clients for making IPC calls into the HIDL component.
hwservicemanager leverages SE policies and the SE Linux kernel to ensure only components in the system that are assigned the proper SE context can register as a HIDL-defined HAL or ask to use one.
HIDL Services
HIDL services expose a binder to the system, which implements a HIDL-defined interface. This acts as the glue between the HIDL-defined contract and the hardware it is intended to control.
Note
“Hardware” in this context may or may not be actual underlying hardware. The interface being exposed may have its implementation entirely in software. For example, it may be possible to have a coarse-level location device using nothing more than geolocation information retrieved from a public Internet server.
HIDL Client Applications
As has already been discussed with the traditional Android HAL, the processes using the HIDL-based HAL are not typical Android applications. These are typically core system framework components, native processes/daemons, or vendor-specific add-ons that support the specific hardware.
Hardware Interface Definition Language (HIDL)
Each of the binderized HAL interfaces is defined using definition files written in HIDL, just as AIDL is used to define Binder-based service interfaces. HIDL syntax is somewhat different, though, adapting the features available from the underlying Binder subsystem to make it extremely efficient. This is important for low-latency communication with hardware.
HIDL is a mix of C/C++ and Java syntaxes, including support for Javadoc style comments and Java-like annotations. Like other Binder-based interfaces, HIDL interfaces are defined and implemented in a way that allows two separately compiled codebases to communicate with each other.
HIDL definitions are stored in .hal files and are located in specific directories within the platform source tree. Each HIDL defines an interface as part of a module within a package and is versioned. This combination of namespace and strict versioning is required because the HIDL package needs to remain compatible with both current and future software that may use the interface. For example, at the time of this writing, the latest HIDL interface for utilizing a fingerprint reader is [email protected].
Generally speaking, HIDL package namespaces fall into one of two categories:
android.hardware: The core HIDL packages defined by Androidvendor.VENDOR.hardware: OEM/ODM-defined HIDL packages
Android does define some additional package namespaces for other internal interfaces, but these are the two primary namespaces when dealing with hardware-related features. In the fingerprint HIDL shown in the preceding paragraph, the HIDL package is part of the android.hardware package, the biometrics module, and the fingerprint submodule. It is version 2.1 of the interface. The hierarchical nature of the package naming is also relevant when building the HIDL, as we will see in Chapter 11 when building a custom HIDL for Acme.
Like other source file types, HIDL files can import other interfaces as well as their types. Interfaces define one or more methods exposed by the HAL. Recall that HIDL is Binder-based, meaning that the client and backing HIDL service will almost always be in two separate processes. Thus, each HIDL method call is an interprocess communication (IPC) call, which involves transferring data and control between the processes. By default, methods are synchronous: The caller will block until the IPC call returns. For efficiency and clarity, data is always passed to the called method and is not copied back. This is the equivalent of the in keyword for arguments in AIDL-defined interfaces. In other words, any input arguments to a HIDL API call are passed by value.
You can find the HIDL grammar definition on the AOSP source site: https://source.android.com/devices/architecture/hidl#grammar.
Rather than drill down into every aspect of the HIDL language definition, walking through an example will illustrate the basics. For this example, let’s look at the sensors HIDL definition, [email protected]. You can find the HAL in the source tree at hardware/interfaces/sensors/2.0. There are several files in this directory, as shown in Listing 10.1.
Listing 10.1 Sensors 2.0 HIDL Files
$ ls -l hardware/interfaces/sensors/2.0 total 56 -rw-r--r-- 1 aosp staff 404 Oct 13 09:31 Android.bp -rw-r--r-- 1 aosp staff 12946 Oct 13 09:31 ISensors.hal -rw-r--r-- 1 aosp staff 1778 Oct 13 09:31 ISensorsCallback.hal drwxr-xr-x 2 aosp staff 374 Oct 13 09:31 default -rw-r--r-- 1 aosp staff 1596 Oct 13 09:31 types.hal drwxr-xr-x 3 aosp staff 102 Oct 13 09:31 vts $
Android.bp: This is the Android build blueprint file.ISensors.hal: This is the primary HIDL interface definition for the sensors binderized HAL.ISensorsCallback.hal: This is an additional HIDL-defined interface, provided by clients to the sensors binderized HAL and will be called when data is available.default: This subdirectory contains a default implementation of the binderized HIDL service.types.hal: This file is used to define any data structures that may be needed by the HIDL-defined interface. Unlike AIDL, there is no mechanism to declare a structure/object “parcelable” so it may be used across the binder interface. Instead, HIDL requires the types to be declared in a .halfile for use by the HIDL interface.
The complete sensors 2.0 interface illustrates the HIDL syntax and capabilities well. Let’s walk through the ISensors.hal in pieces, starting with Listing 10.2.
Listing 10.2 Sensors 2.0 Interface Definition, Part 1
package [email protected]; import @1.0::Event; import @1.0::OperationMode; import @1.0::RateLevel; import @1.0::Result; import @1.0::SensorInfo; import @1.0::SharedMemInfo; import @2.0::ISensorsCallback;
The start of ISensors.hal, as shown in Listing 10.2, will look somewhat familiar to Java developers. Each HIDL-defined interface is defined as a package and is versioned using the @major.minor syntax. HIDL interfaces are defined to be part of packages that follow a hierarchical namespace like in Java or C++. Android defines several internal packages for HAL and framework interfaces, as shown in Table 10.1.
Table 10.1 Android-Defined HIDL Packages
Package Prefix |
Location |
Interface Type |
|
|
HAL |
|
|
Android Framework Related |
|
|
Android System Related |
|
|
Core HIDL |
|
|
Vendor (OEM/ODM) Defined |
As illustrated, vendors (ODMs/OEMs) may define their own HIDL interfaces. These may be completely custom HIDL interfaces or extensions to existing interface definitions. All interfaces are always versioned using a major and minor number.
After a HIDL interface is “published” (for example, in use on a platform) at a specific version, the interface is locked down and may not change for that specific version. This is enforced at build time using a hash of the HIDL interface definition at a specific version. Once the interface has been “published,” any attempt to change the definition without changing the version will result in a build error.
After the package declaration, note the series of import statements. Just like Java or Kotlin, these statements are used to pull in other HIDL-defined interfaces or types. However, like AIDL definitions, types or other interfaces must be imported, even if they are defined in the same package, as shown with @2.0::ISensosCallback here.
The type of import depends on the file in which the import statement is located. In this example, the import statements are in the ISensors.hal file, making them interface-level imports. If, instead, these import statements were in the types.hal file for sensors, they would be package-level imports. The difference between the two is subtle, but important to understand. An interface-level import is an import statement located within a specific interface .hal file, making the import available to only that HIDL interface. On the other hand, a package-level import is an import statement located in a types.hal file for a given package/module/submodule hierarchy. The net effect of this type of import is that the imported type(s) are available to all interfaces within the package/module/submodule.
Note how each of the import statements in Listing 10.2 starts with the version declaration. This means the imports are types or interfaces that are defined within the current package, android.hardware.sensors. The sensors HIDL clearly shows how one interface version can build upon a previous version. In this case, the sensors HIDL version 2.0 builds upon the 1.0 definition by leveraging types/interfaces defined in both. Three other forms of import statements can also be used, all of which start with the fully qualified package name (FQPN) of the import, before the version specifier, as shown in Listing 10.3.
Listing 10.3 Additional HIDL Import Syntax
import [email protected] import [email protected]::INTERFACE import [email protected]::types
The first form would include all interfaces and types from the specified package version. The second form imports a specific interface and all types from a package. The third form is used to import just the types from another package, but none of the interfaces.
Continuing further into the sensors HAL example, the interface declaration comes next, a portion of which is shown in Listing 10.4.
Listing 10.4 Sensors 2.0 Interface Definition, Part 2
interface ISensors {
/**
* Enumerate all available (static) sensors.
*
* The SensorInfo for each sensor returned by getSensorsList must be stable
* from the initial call to getSensorsList after a device boot until the
* entire system restarts. The SensorInfo for each sensor must not change
* between subsequent calls to getSensorsList, even across restarts of the
* HAL and its dependencies (for example, the sensor handle for a given
* sensor must not change across HAL restarts).
*/
getSensorsList() generates (vec<SensorInfo> list);
/**
* Place the module in a specific mode. The following modes are defined
*
* SENSOR_HAL_NORMAL_MODE - Normal operation. Default state of the module.
*
* SENSOR_HAL_DATA_INJECTION_MODE - Loopback mode.
* Data is injected for the supported sensors by the sensor service in
* this mode.
*
* @return OK on success
* BAD_VALUE if requested mode is not supported
* PERMISSION_DENIED if operation is not allowed
*/
setOperationMode(OperationMode mode) generates (Result result);
...
@entry
@callflow(next = {"getSensorsList"})
initialize(fmq_sync<Event> eventQueueDescriptor,
fmq_sync<uint32_t> wakeLockDescriptor,
ISensorsCallback sensorsCallback)
generates
(Result result);
...
registerDirectChannel(SharedMemInfo mem)
generates (Result,
int32_t channelHandle);
The code in Listing 10.4 defines the interface [email protected]::ISensors and the methods it exposes.
Each HIDL file contains a single interface definition and may also contain types the interface requires. Interfaces may also inherit from other interfaces using the extends keyword, similar to the way Java interfaces are inherited. However, just like Java, HIDL does not support multiple inheritance. Interfaces that do not explicitly extend another interface implicitly extend from [email protected]::IBase.
The methods shown in Listing 10.4 illustrate standard types, custom types, and return values. Methods may return nothing, a primitive, a custom type, or multiple values. All the interface methods shown in Listing 10.4 show return values that include custom types. The registerDirectChannel method returns multiple values.
The syntax for returned data looks different than in Java or C/C++. Return data is specified with the generates keyword. When a primitive value is returned, the returned data is simply returned from the method. If the returned value is not primitive, however, the HIDL framework generates a synchronous callback function that the server side calls to return data.
The prototypes for the HIDL methods are exactly the same for client and server side, so the client must handle the return data via callback when the return type is non-primitive. In this case, the HIDL method call on the client blocks until the server side returns, but the return data is sent back to the client via the server invoking the provided callback, which runs in the client before the original method call returns. This makes for an interesting mix of error-handling code. Even methods that have no return value still return a Return object defined by HIDL. Using this, the client can check to see whether a low-level error of some kind occurred while making the method call.
From the client perspective, the interface methods are blocking methods by default. This is true, even if the method does not return any data. Just like AIDL-defined interfaces, HIDL interface methods may be declared as asynchronous using the oneway keyword. Unlike AIDL interfaces, though, all data is owned by the caller. This is akin to an AIDL interface where input arguments for a method are declared using the in keyword.
Note
Although HIDL does not enforce a strict per-transaction (for example, method call) data limit, keeping the size of the data less than 4KB per transaction is considered a best practice. Remember, there may be multiple transactions from multiple processes in flight to a given HIDL simultaneously. If an interface’s method(s) use more than this in a single transaction, the interface should be re-architected.
Just like AIDL-defined interfaces, HIDL is built on top of Android’s Binder framework, which has a 1MB limit for all concurrent transactions. Exceeding this limit will result in hard-to-debug failed transactions that are not directly related to the specific method throwing a TransactionException.
HIDL Types
Data types in HIDL look similar to Java and C++, with some subtle differences. In fact, the syntax used is a mix of both Java and C++:
structanduniondeclarations follow C++ syntax and must be named.typedefis allowed and follows C++ syntax.C++-style comments may be used and are copied to generated header files.
Package namespaces follow Java style syntax. Generated C++ headers convert the namespace to C++ style. For example,
android.hardware.sensorsin HIDL becomesandroid::hardware::sensorsin C++.Comments may include documentation via Javadoc format.
Java-style annotations may be added to type declarations.
Forward declarations are not allowed. Structures may not refer to themselves.
The concept of a pointer does not exist in HIDL.
Arrays follow Java-style array usage, as shown in Listing 10.5.
Listing 10.5 HIDL Array Syntax
struct Point {
int32_t x;
int32_t y;
};
Point[3] triangle;
HIDL includes a number of pre-defined types, some of which are only available in C++ code. This is in large part because HALs generally deal with underlying hardware and need to be extremely fast and efficient. Although HIDL servers can be implemented in Java (for most things), implementing hardware driver HIDL servers in Java is not recommended. Table 10.2 provides a high-level view of HIDL types and their equivalent in C++ and Java.
Table 10.2 HIDL-defined Types
HIDL Type |
C++ Type |
Java Type |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
† Java does not have unsigned integer types. The unsigned data is placed into signed integer types, without conversion. Any Java code using this must treat the signed data as if it were unsigned.
†† Java primitives are converted to the wrapped type (for example, vec<int> becomes ArrayList<Integer>).
††† Java String is converted to UTF-8 as the common HIDL type during transport and may never be null when passed into HIDL. Note that character set translation from Java’s default UTF-16 to UTF-8 can result in different encodings.
†††† Available starting with Android 11.
You can find more details on HIDL data types as well as how they are used in C++ and Java on these pages:
https://source.android.com/devices/architecture/hidl/types
https://source.android.com/devices/architecture/hidl-cpp/types
https://source.android.com/devices/architecture/hidl-java/types
Each HIDL package may define types that are relevant to it. This is accomplished via the file types.hal in the package module directory. Looking at the [email protected] package again, the types.hal file is small because the 2.0 interface builds upon the 1.0 interface (see Listing 10.6).
Listing 10.6 Sensors 2.0 types.hal
package [email protected]; enum SensorTimeout : int32_t { /** * The maximum number of seconds to wait for a message on the Wake Lock FMQ * before automatically releasing any wake_lock held for a WAKE_UP event. */ WAKE_LOCK_SECONDS = 1, }; enum EventQueueFlagBits : uint32_t { /** * Used to notify the Event FMQ that events should be read and processed. */ READ_AND_PROCESS = 1 << 0, /** * Used by the framework to signal to the HAL when events have been * successfully read from the Event FMQ. * * If the MessageQueue::writeBlocking function is being used to write sensor * events to the Event FMQ, then the readNotification parameter must be set * to EVENTS_READ. */ EVENTS_READ = 1 << 1, }; enum WakeLockQueueFlagBits : uint32_t { /** * Used to notify the HAL that the framework has written data to the Wake * Lock FMQ. */ DATA_WRITTEN = 1 << 0, };
Note how the types.hal file uses the same package declaration as the interface files(s) for the package. Custom structures (classes) may be defined in the types.hal file as well as custom enums, typedefs, and so on.
HIDL Services
HIDL Services provide the implementation of a specific HAL definition. Although HIDL Services may be implemented in C++ or Java, the framework is geared more toward C++-based implementations. A handful of Java-based HIDL service implementations are in the Android framework, but they are more the exception than the rule. Because of this, the remainder of this section will only cover C++ implementations.
HIDL services, like their Android Binder service counterparts, run in standalone processes. These processes are started by the init daemon at startup, like other native processes. The HIDL service implements the HIDL-defined interface, communicating with whatever hardware or other component necessary to implement the defined interface.
To make itself available to HIDL client processes, each service is responsible for registering itself with the Android HIDL system and processing requests as they arrive.
Listing 10.7 contains the main entry point for the default sensor service implementation. This is found at hardware/interfaces/sensors/2.0/default/service.cpp. Note how this main is short and simple: It configures the thread pool, creates an instance of the Sensors class, and joins the thread pool. Each of these steps is important and ties the whole thing together.
Listing 10.7 Default Sensors 2.0 Service Entry Point
using android::hardware::configureRpcThreadpool;
using android::hardware::joinRpcThreadpool;
using android::hardware::sensors::V2_0::ISensors;
using android::hardware::sensors::V2_0::implementation::Sensors;
int main(int /* argc */, char** /* argv */) {
configureRpcThreadpool(1, true);
android::sp<ISensors> sensors = new Sensors();
if (sensors->registerAsService() != ::android::OK) {
ALOGE("Failed to register Sensors HAL instance");
return -1;
}
joinRpcThreadpool();
return 1; // joinRpcThreadpool shouldn't exit}
The HIDL support library allows HIDL services to configure the number of threads used to handle requests via the configureRpcThreadpool method. In this case, the default sensor service implementation limits 195requests to being handled by a single thread. This is setting up the internal thread pool to be managed and used by the underlying Binder framework, similar to what is done for Android services.
The implementation of the sensors 2.0 HIDL is provided by the Sensors class, located in the same directory as the service code from Listing 10.7. The HIDL build tools automatically create the registerAsService method, called in the code in Listing 10.7. This method registers the backing binder object, exposed through the kernel, for the ISensors interface with the hwservicemanager process.
Finally, the joinRpcThreadpool method is called, making the main thread of this process one of the threads in the thread pool from which services requests. This results in the process servicing incoming requests forever. This method should never exit, as shown from the comment in the code.
When a client calls a specific API method defined in ISensors.hal, the Binder and HIDL framework calls the matching method in the instance of the Sensors class. The method will perform its required action, returning a primitive result or executing a callback.
Listing 10.8 shows a portion of the C++ prototypes for the ISensors interface that were shown in Listing 10.4. As previously mentioned, this file is autogenerated by the build system, which can make it a little difficult to track down! In the AOSP build tree for Android 10, the soong build system places the generated files into an intermediates directory tree based on the type of generated file. Because this is an AOSP-defined hardware interface, the base of the generated files is ./out/soong/.intermediates/hardware/interfaces; we’ll call it HW_IFS for brevity. The resultant directory hierarchy is still quite lengthy, even with this substitution:
HW_IFS/sensors/2.0/android.hardware/[email protected]_genc++headers/gen/android/ ➥ hardware/sensors/2.0/ISensors.h.
Note
Sometimes a line of code will be too long to fit on one line in this book. The code continuation symbol (➥) indicates that the line continues from the previous line.
Listing 10.8 ISensors C++ Definition
struct ISensors : public ::android::hidl::base::V1_0::IBase {
...
using getSensorsList_cb = std::function<void(const ::android::hardware::hidl_vec
➥ <::android::hardware::sensors::V1_0::SensorInfo>& list)>;
...
virtual ::android::hardware::Return<void> getSensorsList(getSensorsList_cb
➥ hidl_cb) = 0;
...
virtual ::android::hardware::Return<::android::hardware::sensors::V1_0::Result>
➥ setOperationMode(::android::hardware::sensors::V1_0::OperationMode mode) = 0;
...
virtual ::android::hardware::Return<::android::hardware::sensors::V1_0::Result>
➥ initialize(const ::android::hardware::MQDescriptorSync
➥ <::android::hardware::sensors::V1_0::Event>& eventQueueDescriptor,
➥ const ::android::hardware::MQDescriptorSync<uint32_t>& wakeLockDescriptor,
➥ const ::android::sp<::android::hardware::sensors::V2_0
➥::ISensorsCallback>& sensorsCallback) = 0;
...
virtual ::android::hardware::Return<void> registerDirectChannel(const
➥::android::hardware::sensors::V1_0::SharedMemInfo& mem,
➥ registerDirectChannel_cb_hidl_cb) = 0;
...
}
Wow, that is tough to read! However, stripping down the namespaces a bit makes them easier to understand. For example, the extremely long method definition for initialize is shown in Listing 10.9 when using the namespaces in the C++ code. This is what the default implementation of the 2.0 sensors HAL does.
Listing 10.9 ISensors C++ Service Implementation
using ::android::hardware::sensors::V1_0::Event;
using ::android::hardware::sensors::V1_0::OperationMode;
using ::android::hardware::sensors::V1_0::RateLevel;
using ::android::hardware::sensors::V1_0::Result;
using ::android::hardware::sensors::V1_0::SharedMemInfo;
using ::android::hardware::sensors::V2_0::SensorTimeout;
using ::android::hardware::sensors::V2_0::WakeLockQueueFlagBits;
...
Return<void> Sensors::getSensorsList(getSensorsList_cb _hidl_cb) {
std::vector<SensorInfo> sensors;
for (const auto& sensor : mSensors) {
sensors.push_back(sensor.second->getSensorInfo());
}
// Call the HIDL callback with the SensorInfo
_hidl_cb(sensors);
return Void();
}
...
Return<Result> Sensors::setOperationMode(OperationMode mode) {
...
return Result::OK;
}
Return<Result> Sensors::initialize(
const ::android::hardware::MQDescriptorSync<Event>& eventQueueDescriptor,
const ::android::hardware::MQDescriptorSync<uint32_t>& wakeLockDescriptor,
const sp<ISensorsCallback>& sensorsCallback) {
...
}
That is much better! Previously, in the HIDL definition of each method, the generates keyword declared the data to be returned. Note how depending on the return data, it may actually be returned directly or via an embedded callback. The getSensorsList method returns data (a list of SensorInfo) by executing the provided callback with the data. Both setOperationMode and initialize return Result, which is defined to be an int32_t so it can be returned directly.
HIDL Clients
HIDL clients utilize the interface exposed by the underlying service implementation. Unlike the Android Binder-based clients used at the system/framework level, the HIDL client code does not have to look up the binder for the backing service directly. The necessary functionality is built into the code generated when the HIDL interface is compiled. Each interface implementation has a getService method that returns an instance of the interface or a proxy to it. For example, Listing 10.10 shows the prototype for version 2.0 of the ISensors implementation.
Listing 10.10 ISensors Prototype for getService()
static ::android::sp<ISensors> getService( const std::string &serviceName="default", bool getStub=false );
The getService method communicates with hwservicemanager to retrieve the backing binder from the HIDL service implementation. The interface type (for example, ISensors) and service name are used to look up the HIDL service that was registered with the system. The client leveraging this method uses the smart pointer to the interface (for example, ::android::sp<ISensors>), as defined by the prototype in Listing 10.10. However, behind the scenes, this may be direct access to the backing service implementation (for example, pass-through), or it may be a binder proxy instance. The calling semantics are exactly the same: The methods of the interface are called via the smart pointer.
An example of this is shown in Listing 10.11, taken from SensorsWrapperBase used within the AOSP framework (see frameworks/native/services/sensorservice/SensorWrapper.h).
Listing 10.11 Calling the ISensors Interface
Return<void> getSensorsList(ISensors::getSensorsList_cb _hidl_cb) override
return mSensors->getSensorsList(_hidl_cb);
}
It is worth reiterating that HIDL interfaces that return non-primitive data accomplish it via callback to the client. In the implementation shown in Listing 10.11, the caller of this wrapper method must provide the callback function defined by the HIDL, an instance of ISensors::getSensorList_cb. In Listing 10.4 where this HIDL method was defined, the method does not return data, but generates it. Closing the loop, the code in Listing 10.8 defines ISensors::getSensorsList_cb to be a function that receives a vector of SensorInfo objects—the type that the HIDL interface generates.
Summary
This chapter examined the revised hardware abstraction layer architecture introduced in Android 8: binderized HAL using HIDL. Internally called Project Treble, the binderized HAL is a complete overhaul of the HAL concept. Prior to Android 8, vendor/OEM HALs were provided as a set of shared libraries customized for the specific target that were built into the system image. With HIDL, the HAL is now based on Android’s IPC mechanism, Binder. The primary goals of such a radical change were isolation of vendor-specific components so the AOSP framework (system) can be updated without requiring a rebuild of the vendor components; better interoperability between components; better data movement efficiency; and more intuitive calling semantics with respect to memory usage/ownership.
Similar to the traditional Android HAL, the platform defines the abstractions to be implemented by the platform components or the vendor/OEM. Unlike the traditional HAL, though, the abstractions are now defined via HIDL .hal files, which are cousins to the AIDL file used in Binder-based services. Although HIDL and AIDL files have some things in common, they are different in their syntax with HIDL placing stricter syntax rules and form into place. This allows for much of the server and client “boilerplate” code to be autogenerated or provided via helper library—leaving the vendor/OEM to focus on the functionality of the HIDL implementation rather than the nuts and bolts of the underlying HIDL/Binder interactions.