A. Numerical Techniques
Lake Michigan—unsalted and shark-free.
A.1 Useful Integrals in Chemical Reactor Design
Also see www.integrals.com.
∫χ0dx1-x=ln11-x(A-1)
∫x2x1dx(1-x)2=11-x2-11-x1(A-2)
∫x0dx(1-x)2=χ1-x(A-3)
∫x0dx1+ɛx=1ɛln(1+ɛx)(A-4)
∫x0(1+ɛx)dx1-x=(1+ɛ)ln11-x-ɛx(A-5)
∫x0(1+ɛx)dx(1-x)2=(1+ɛ)x1-x-ɛln11-x(A-6)
∫x0(1+ɛx)2dx(1-x)2=2ɛ(1+ɛ)ln(1-x)+ɛ2x+(1+ɛ)2x1-x(A-7)
∫x0dx(1−x)(ΘB−x)=1ΘB−1InΘB−xΘB(1−x)ΘB≠1(A-8)
∫W0(1-αW)1/2dW=23α[1-(1-αW)3/2](A-9)
∫x0dxax2+bx+c=-22ax+b+2bfor b2=4ac (A-10)
∫x0dxax2+bx+c=1a(p-q)ln(qp⋅x−px−q)for b2>4ac (A-11)
where p and q are the roots of the equation.
ax2+bx+c=0,that is, p,q=−b−+√b2−4ac2a∫x0a+bxc+gxdx=bxg+ag−bcg2 Inc+gxc(A-12)
A.2 Equal-Area Graphical Differentiation
There are many ways of differentiating numerical and graphical data (cf. Chapter 7). We shall confine our discussions to the technique of equal-area differentiation. In the procedure delineated here, we want to find the derivative of y with respect to x.
This method finds use in Chapter 5.
Tabulate the (yi, xi) observations as shown in Table A-1.
For each interval, calculate Δxn = xn – xn-1 and Δyn – yn – yn-1.
TABLE A-1 FINDING DIFFERENTIALS (dydx) FROM DISCRETE DATA
xi
yi
Δx
Δy
ΔyΔx
dxdy
x1
y1
(dydx)1
x2 – x1
y2 – y1
(ΔyΔx)2
x2
y2
(dydx)2
x3 – x2
y3 – y2
(ΔyΔx)3
x3
y3
(dydx)3
x4
y4
and so on.
Calculate Δyn/Δxn as an estimate of the average slope in an interval xn-1 to xn.
Plot these values as a histogram versus xi. The value between x2 and x3, for example, is (y3 – y2)/(x3 – x2). Refer to Figure A-1.
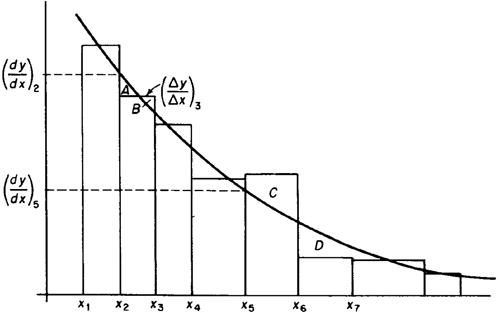
Figure A-1 Equal-area differentiation.
Next, draw in the smooth curve that best approximates the area under the histogram. That is, attempt in each interval to balance areas such as those labeled A and B, but when this approximation is not possible, balance out over several intervals (as for the areas labeled C and D). From our definitions of Δx and Δy, we know that
yn-y1=nΣi=2ΔyΔxiΔxi(A-13)
The equal-area method attempts to estimate dy/dx so that
yn-y1=∫xnx1dydxdx(A-14)
that is, so that the area under Δy/Δx is the same as that under dy/dx, everywhere possible.
Read estimates of dy/dx from this curve at the data points x1, x2, … and complete the table.
An example illustrating the technique is given on the CRE Web site, Appendix A.
Differentiation is, at best, less accurate than integration. This method also clearly indicates bad data and allows for compensation of such data. Differentiation is only valid, however, when the data are presumed to differentiate smoothly, as in rate-data analysis and the interpretation of transient diffusion data.
A.3 Solutions to Differential Equations
A.3.A First-Order Ordinary Differential Equations
See the CRE Web site, Appendix A.3.
dydt+f(t)y=g(t)(A-15)
Using integrating factor = exp (∫fdt), the solution is
y=e−∫fdt∫g(t)e∫fdtdt+K1e-∫fdt(A-16)
Example A–1 Integrating Factor for Series Reactions
dydx+k2y=k1e−k1t
Comparing the earlier equation with Equation (A-15) we note
f(t) = k2
and the integrating factor =exp∫k2dt=ek2t
Multiplying both sides by the integrating factor
d(yek2t)dt=ek2tk1e-k1t=k1e(k2-k1)t
Integrating
ek2ty=k1e(k2-k1)tdt=k1k2-k1e(k2-k1)t+K1y=k1k2-k1e-k1t+K1e-k2tt=0 y=0y=k1k2-k1[e−k1t−e−k2t]
A.3.B Coupled Differential Equations
Techniques to solve coupled first-order linear ODEs such as
dxdt=ax+bydydt=cx+dy
are given in Web Appendix A.3 on the CRE Web site (http://www.umich.edu/~elements/6e/appendix/AppA.3_Web.pdf).
A.3.C Second-Order Ordinary Differential Equations
Methods of solving differential equations of the type
d2yd2x-βy=0(A-17)
can be found in such texts as Applied Differential Equations by M. R. Spiegel (Upper Saddle River, NJ: Pearson, 1958, Chapter 4; a great book even though it’s old) or in Differential Equations by F. Ayres (New York: Schaum Outline Series, McGraw-Hill, 1952). Solutions of this type are required in Chapter 15. One method of solution is to determine the characteristic roots of
(d2dx2-β)y=(m2−β)y
which are
m=±√β
The solution to the differential equation is
y=A1e−√βx+B1e+√βx(A-18)
where A1 and B1 are arbitrary constants of integration. It can be verified that Equation (A-18) can be arranged in the form
y=A sinh √βx+B cosh√βx(A-19)
Equation (A-19) is the more useful form of the solution when it comes to evaluating the constants A and B because sinh(0) = 0 and cosh(0) = 1.0.
A.4 Numerical Evaluation of Integrals
In this section, we discuss techniques for numerically evaluating integrals for solving first-order differential equations.
Trapezoidal rule (two-point) (Figure A-2). This method is one of the simplest and most approximate, as it uses the integrand evaluated at the limits of integration to evaluate the integral
when h = X1 = X0.

Figure A-2 Trapezoidal rule illustration.
Simpson’s one-third rule (three-point) (Figure A-3). A more accurate evaluation of the integral can be found with the application of Simpson’s rule:
where
Methods to solve
in Chapters 2, 4, 5, 12, and
in Chapter 17
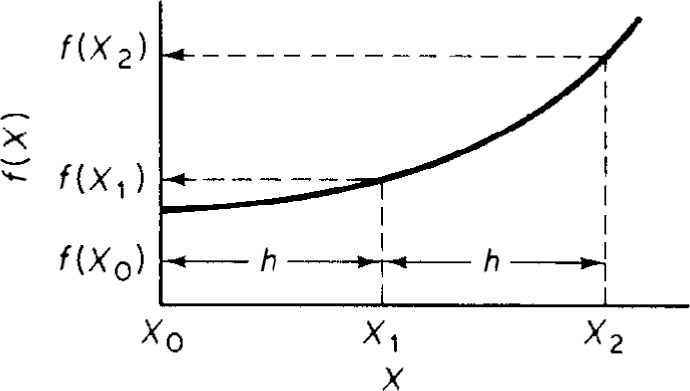
Figure A-3 Simpson’s three-point rule illustration.
Simpson’s three-eighths rule (four-point) (Figure A-4). An improved version of Simpson’s one-third rule can be made by applying Simpson’s three-eighths rule:
where
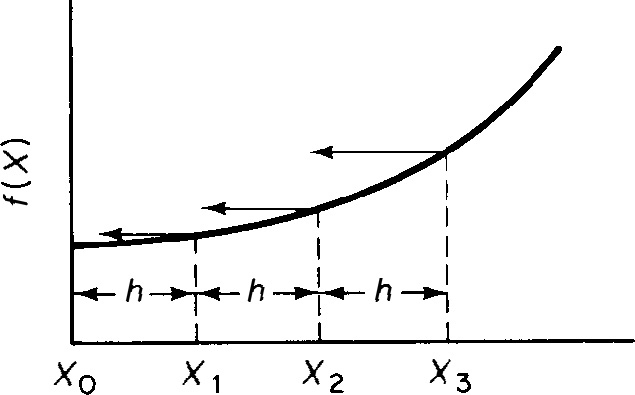
Figure A-4 Simpson’s four-point rule illustration.
Five-point quadrature formula.
where
For N = 1 points, where (N/3) is an integer
where
For N = 1 points, where N is even
where
These formulas are useful in illustrating how the reaction engineering integrals and coupled ODEs (ordinary differential equation(s)) can be solved, and also when there is an ODE solver power failure or some other malfunction.
A.5 Semi-Log Graphs
Review how to take slopes on semi-log graphs on the Web. Also see https://bolide.cs.uoguelph.ca/tutorials/GLP. Also see Web Appendix A.5, Using Semi-Log Plots for Data Analysis.
A.6 Software Packages
Instructions on how to use Polymath, MATLAB, Python, Wolfram, COMSOL, and Aspen can be found on the CRE Web site.
For the ordinary differential equation solver (ODE solver), contact:
Polymath Software
P.O. Box 523
Willimantic, CT 06226-0523
https://www.polymath-software.com/fogler
Wolfram
100 Trade Center Drive
Champaign, IL 61820-7237
Tel: +1-217-398-0700
+1-800-WOLFRAM (965-3726)
Fax: +1-217-398-0747
Python Software
206 East 9th Street
Floor 18
Austin, TX 78701
Tel: +1-512-222-5440
E-mail: [email protected]
MATLAB
The Math Works, Inc.
20 North Main Street, Suite 250
Sherborn, MA 01770
For ordinary and partial differentiating equation solvers, contact:
COMSOL, Inc.
1 New England Executive Park
Burlington, MA 01803
Tel: +1-781-273-3322
Fax: +1-781-273-6603
E-mail: [email protected]
For simulators, contact:
Aspen Technology, Inc.
10 Canal Park
Cambridge, MA 02141-2201
Email: [email protected]