
CHAPTER 12
File-System Implementation
As we saw in Chapter 11, the file system provides the mechanism for on-line storage and access to file contents, including data and programs. The file system resides permanently on secondary storage, which is designed to hold a large amount of data permanently. This chapter is primarily concerned with issues surrounding file storage and access on the most common secondary-storage medium, the disk. We explore ways to structure file use, to allocate disk space, to recover freed space, to track the locations of data, and to interface other parts of the operating system to secondary storage. Performance issues are considered throughout the chapter.
CHAPTER OBJECTIVES
- To describe the details of implementing local file systems and directory structures.
- To describe the implementation of remote file systems.
- To discuss block allocation and free-block algorithms and trade-offs.
12.1 File-System Structure
Disks provide most of the secondary storage on which file systems are maintained. Two characteristics make them convenient for this purpose:
- A disk can be rewritten in place; it is possible to read a block from the disk, modify the block, and write it back into the same place.
- A disk can access directly any block of information it contains. Thus, it is simple to access any file either sequentially or randomly, and switching from one file to another requires only moving the read–write heads and waiting for the disk to rotate.
We discuss disk structure in great detail in Chapter 10.
To improve I/O efficiency, I/O transfers between memory and disk are performed in units of blocks. Each block has one or more sectors. Depending on the disk drive, sector size varies from 32 bytes to 4,096 bytes; the usual size is 512 bytes.
File systems provide efficient and convenient access to the disk by allowing data to be stored, located, and retrieved easily. A file system poses two quite different design problems. The first problem is defining how the file system should look to the user. This task involves defining a file and its attributes, the operations allowed on a file, and the directory structure for organizing files. The second problem is creating algorithms and data structures to map the logical file system onto the physical secondary-storage devices.
The file system itself is generally composed of many different levels. The structure shown in Figure 12.1 is an example of a layered design. Each level in the design uses the features of lower levels to create new features for use by higher levels.
The I/O control level consists of device drivers and interrupt handlers to transfer information between the main memory and the disk system. A device driver can be thought of as a translator. Its input consists of high-level commands such as “retrieve block 123.” Its output consists of low-level, hardware-specific instructions that are used by the hardware controller, which interfaces the I/O device to the rest of the system. The device driver usually writes specific bit patterns to special locations in the I/O controller's memory to tell the controller which device location to act on and what actions to take. The details of device drivers and the I/O infrastructure are covered in Chapter 13.
The basic file system needs only to issue generic commands to the appropriate device driver to read and write physical blocks on the disk. Each physical block is identified by its numeric disk address (for example, drive 1, cylinder 73, track 2, sector 10). This layer also manages the memory buffers and caches that hold various file-system, directory, and data blocks. A block in the buffer is allocated before the transfer of a disk block can occur. When the buffer is full, the buffer manager must find more buffer memory or free up buffer space to allow a requested I/O to complete. Caches are used to hold frequently used file-system metadata to improve performance, so managing their contents is critical for optimum system performance.
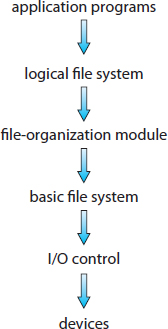
Figure 12.1 Layered file system.
The file-organization module knows about files and their logical blocks, as well as physical blocks. By knowing the type of file allocation used and the location of the file, the file-organization module can translate logical block addresses to physical block addresses for the basic file system to transfer. Each file's logical blocks are numbered from 0 (or 1) through N. Since the physical blocks containing the data usually do not match the logical numbers, a translation is needed to locate each block. The file-organization module also includes the free-space manager, which tracks unallocated blocks and provides these blocks to the file-organization module when requested.
Finally, the logical file system manages metadata information. Metadata includes all of the file-system structure except the actual data (or contents of the files). The logical file system manages the directory structure to provide the file-organization module with the information the latter needs, given a symbolic file name. It maintains file structure via file-control blocks. A file-control block (FCB) (an inode in UNIX file systems) contains information about the file, including ownership, permissions, and location of the file contents. The logical file system is also responsible for protection, as discussed in Chaptrers 11 and 14.
When a layered structure is used for file-system implementation, duplication of code is minimized. The I/O control and sometimes the basic file-system code can be used by multiple file systems. Each file system can then have its own logical file-system and file-organization modules. Unfortunately, layering can introduce more operating-system overhead, which may result in decreased performance. The use of layering, including the decision about how many layers to use and what each layer should do, is a major challenge in designing new systems.
Many file systems are in use today, and most operating systems support more than one. For example, most CD-ROMs are written in the ISO 9660 format, a standard format agreed on by CD-ROM manufacturers. In addition to removable-media file systems, each operating system has one or more disk-based file systems. UNIX uses the UNIX file system (UFS), which is based on the Berkeley Fast File System (FFS). Windows supports disk file-system formats of FAT, FAT32, and NTFS (or Windows NT File System), as well as CD-ROM and DVD file-system formats. Although Linux supports over forty different file systems, the standard Linux file system is known as the extended file system, with the most common versions being ext3 and ext4. There are also distributed file systems in which a file system on a server is mounted by one or more client computers across a network.
File-system research continues to be an active area of operating-system design and implementation. Google created its own file system to meet the company's specific storage and retrieval needs, which include high-performance access from many clients across a very large number of disks. Another interesting project is the FUSE file system, which provides flexibility in file-system development and use by implementing and executing file systems as user-level rather than kernel-level code. Using FUSE, a user can add a new file system to a variety of operating systems and can use that file system to manage her files.
12.2 File-System Implementation
As was described in Section 11.1.2, operating systems implement open() and close() systems calls for processes to request access to file contents. In this section, we delve into the structures and operations used to implement file-system operations.
12.2.1 Overview
Several on-disk and in-memory structures are used to implement a file system. These structures vary depending on the operating system and the file system, but some general principles apply.
On disk, the file system may contain information about how to boot an operating system stored there, the total number of blocks, the number and location of free blocks, the directory structure, and individual files. Many of these structures are detailed throughout the remainder of this chapter. Here, we describe them briefly:
- A boot control block (per volume) can contain information needed by the system to boot an operating system from that volume. If the disk does not contain an operating system, this block can be empty. It is typically the first block of a volume. In UFS, it is called the boot block. In NTFS, it is the partition boot sector.
- A volume control block (per volume) contains volume (or partition) details, such as the number of blocks in the partition, the size of the blocks, a free-block count and free-block pointers, and a free-FCB count and FCB pointers. In UFS, this is called a superblock. In NTFS, it is stored in the master file table.
- A directory structure (per file system) is used to organize the files. In UFS, this includes file names and associated inode numbers. In NTFS, it is stored in the master file table.
- A per-file FCB contains many details about the file. It has a unique identifier number to allow association with a directory entry. In NTFS, this information is actually stored within the master file table, which uses a relational database structure, with a row per file.
The in-memory information is used for both file-system management and performance improvement via caching. The data are loaded at mount time, updated during file-system operations, and discarded at dismount. Several types of structures may be included.
- An in-memory mount table contains information about each mounted volume.
- An in-memory directory-structure cache holds the directory information of recently accessed directories. (For directories at which volumes are mounted, it can contain a pointer to the volume table.)
- The system-wide open-file table contains a copy of the FCB of each open file, as well as other information.
- The per-process open-file table contains a pointer to the appropriate entry in the system-wide open-file table, as well as other information.
- Buffers hold file-system blocks when they are being read from disk or written to disk.
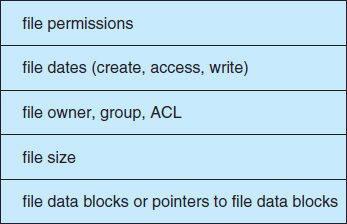
To create a new file, an application program calls the logical file system. The logical file system knows the format of the directory structures. To create a new file, it allocates a new FCB. (Alternatively, if the file-system implementation creates all FCBs at file-system creation time, an FCB is allocated from the set of free FCBs.) The system then reads the appropriate directory into memory, updates it with the new file name and FCB, and writes it back to the disk. A typical FCB is shown in Figure 12.2.
Some operating systems, including UNIX, treat a directory exactly the same as a file—one with a “type” field indicating that it is a directory. Other operating systems, including Windows, implement separate system calls for files and directories and treat directories as entities separate from files. Whatever the larger structural issues, the logical file system can call the file-organization module to map the directory I/O into disk-block numbers, which are passed on to the basic file system and I/O control system.
Now that a file has been created, it can be used for I/O. First, though, it must be opened. The open() call passes a file name to the logical file system. The open() system call first searches the system-wide open-file table to see if the file is already in use by another process. If it is, a per-process open-file table entry is created pointing to the existing system-wide open-file table. This algorithm can save substantial overhead. If the file is not already open, the directory structure is searched for the given file name. Parts of the directory structure are usually cached in memory to speed directory operations. Once the file is found, the FCB is copied into a system-wide open-file table in memory. This table not only stores the FCB but also tracks the number of processes that have the file open.
Next, an entry is made in the per-process open-file table, with a pointer to the entry in the system-wide open-file table and some other fields. These other fields may include a pointer to the current location in the file (for the next read() or write() operation) and the access mode in which the file is open. The open() call returns a pointer to the appropriate entry in the per-process file-system table. All file operations are then performed via this pointer. The file name may not be part of the open-file table, as the system has no use for it once the appropriate FCB is located on disk. It could be cached, though, to save time on subsequent opens of the same file. The name given to the entry varies. UNIX systems refer to it as a file descriptor; Windows refers to it as a file handle.
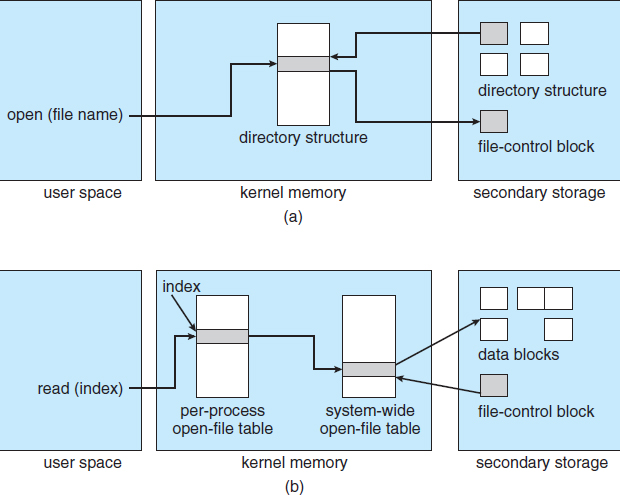
Figure 12.3 In-memory file-system structures. (a) File open. (b) File read.
When a process closes the file, the per-process table entry is removed, and the system-wide entry's open count is decremented. When all users that have opened the file close it, any updated metadata is copied back to the disk-based directory structure, and the system-wide open-file table entry is removed.
Some systems complicate this scheme further by using the file system as an interface to other system aspects, such as networking. For example, in UFS, the system-wide open-file table holds the inodes and other information for files and directories. It also holds similar information for network connections and devices. In this way, one mechanism can be used for multiple purposes.
The caching aspects of file-system structures should not be overlooked. Most systems keep all information about an open file, except for its actual data blocks, in memory. The BSD UNIX system is typical in its use of caches wherever disk I/O can be saved. Its average cache hit rate of 85 percent shows that these techniques are well worth implementing. The BSD UNIX system is described fully in Appendix A.
The operating structures of a file-system implementation are summarized in Figure 12.3.
12.2.2 Partitions and Mounting
The layout of a disk can have many variations, depending on the operating system. A disk can be sliced into multiple partitions, or a volume can span multiple partitions on multiple disks. The former layout is discussed here, while the latter, which is more appropriately considered a form of RAID, is covered in Section 10.7.
Each partition can be either “raw,” containing no file system, or “cooked,” containing a file system. Raw disk is used where no file system is appropriate. UNIX swap space can use a raw partition, for example, since it uses its own format on disk and does not use a file system. Likewise, some databases use raw disk and format the data to suit their needs. Raw disk can also hold information needed by disk RAID systems, such as bit maps indicating which blocks are mirrored and which have changed and need to be mirrored. Similarly, raw disk can contain a miniature database holding RAID configuration information, such as which disks are members of each RAID set. Raw disk use is discussed in Section 10.5.1.
Boot information can be stored in a separate partition, as described in Section 10.5.2. Again, it has its own format, because at boot time the system does not have the file-system code loaded and therefore cannot interpret the file-system format. Rather, boot information is usually a sequential series of blocks, loaded as an image into memory. Execution of the image starts at a predefined location, such as the first byte. This boot loader in turn knows enough about the file-system structure to be able to find and load the kernel and start it executing. It can contain more than the instructions for how to boot a specific operating system. For instance, many systems can be dual-booted, allowing us to install multiple operating systems on a single system. How does the system know which one to boot? A boot loader that understands multiple file systems and multiple operating systems can occupy the boot space. Once loaded, it can boot one of the operating systems available on the disk. The disk can have multiple partitions, each containing a different type of file system and a different operating system.
The root partition, which contains the operating-system kernel and sometimes other system files, is mounted at boot time. Other volumes can be automatically mounted at boot or manually mounted later, depending on the operating system. As part of a successful mount operation, the operating system verifies that the device contains a valid file system. It does so by asking the device driver to read the device directory and verifying that the directory has the expected format. If the format is invalid, the partition must have its consistency checked and possibly corrected, either with or without user intervention. Finally, the operating system notes in its in-memory mount table that a file system is mounted, along with the type of the file system. The details of this function depend on the operating system.
Microsoft Windows–based systems mount each volume in a separate name space, denoted by a letter and a colon. To record that a file system is mounted at F:, for example, the operating system places a pointer to the file system in a field of the device structure corresponding to F:. When a process specifies the driver letter, the operating system finds the appropriate file-system pointer and traverses the directory structures on that device to find the specified file or directory. Later versions of Windows can mount a file system at any point within the existing directory structure.
On UNIX, file systems can be mounted at any directory. Mounting is implemented by setting a flag in the in-memory copy of the inode for that directory. The flag indicates that the directory is a mount point. A field then points to an entry in the mount table, indicating which device is mounted there. The mount table entry contains a pointer to the superblock of the file system on that device. This scheme enables the operating system to traverse its directory structure, switching seamlessly among file systems of varying types.
12.2.3 Virtual File Systems
The previous section makes it clear that modern operating systems must concurrently support multiple types of file systems. But how does an operating system allow multiple types of file systems to be integrated into a directory structure? And how can users seamlessly move between file-system types as they navigate the file-system space? We now discuss some of these implementation details.
An obvious but suboptimal method of implementing multiple types of file systems is to write directory and file routines for each type. Instead, however, most operating systems, including UNIX, use object-oriented techniques to simplify, organize, and modularize the implementation. The use of these methods allows very dissimilar file-system types to be implemented within the same structure, including network file systems, such as NFS. Users can access files contained within multiple file systems on the local disk or even on file systems available across the network.
Data structures and procedures are used to isolate the basic system-call functionality from the implementation details. Thus, the file-system implementation consists of three major layers, as depicted schematically in Figure 12.4. The first layer is the file-system interface, based on the open(), read(), write(), and close() calls and on file descriptors.
The second layer is called the virtual file system (VFS) layer. The VFS layer serves two important functions:
- It separates file-system-generic operations from their implementation by defining a clean VFS interface. Several implementations for the VFS interface may coexist on the same machine, allowing transparent access to different types of file systems mounted locally.
- It provides a mechanism for uniquely representing a file throughout a network. The VFS is based on a file-representation structure, called a vnode, that contains a numerical designator for a network-wide unique file. (UNIX inodes are unique within only a single file system.) This network-wide uniqueness is required for support of network file systems. The kernel maintains one vnode structure for each active node (file or directory).
Thus, the VFS distinguishes local files from remote ones, and local files are further distinguished according to their file-system types.
The VFS activates file-system-specific operations to handle local requests according to their file-system types and calls the NFS protocol procedures for remote requests. File handles are constructed from the relevant vnodes and are passed as arguments to these procedures. The layer implementing the file-system type or the remote-file-system protocol is the third layer of the architecture.
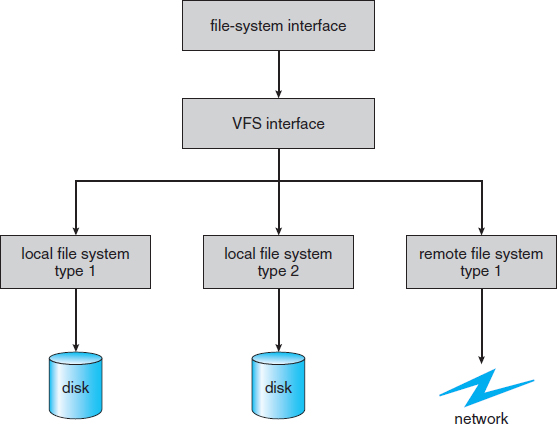
Figure 12.4 Schematic view of a virtual file system.
Let's briefly examine the VFS architecture in Linux. The four main object types defined by the Linux VFS are:
- The inode object, which represents an individual file
- The file object, which represents an open file
- The superblock object, which represents an entire file system
- The dentry object, which represents an individual directory entry
For each of these four object types, the VFS defines a set of operations that may be implemented. Every object of one of these types contains a pointer to a function table. The function table lists the addresses of the actual functions that implement the defined operations for that particular object. For example, an abbreviated API for some of the operations for the file object includes:
- int open(…)—Open a file.
- int close(…)—Close an already-open file.
- ssize_t read(…)—Read from a file.
- ssize_t write(…)—Write to a file.
- int mmap(…)—Memory-map a file.
An implementation of the file object for a specific file type is required to implement each function specified in the definition of the file object. (The complete definition of the file object is specified in the struct file_operations, which is located in the file /usr/include/linux/fs.h.)
Thus, the VFS software layer can perform an operation on one of these objects by calling the appropriate function from the object's function table, without having to know in advance exactly what kind of object it is dealing with. The VFS does not know, or care, whether an inode represents a disk file, a directory file, or a remote file. The appropriate function for that file's read() operation will always be at the same place in its function table, and the VFS software layer will call that function without caring how the data are actually read.
12.3 Directory Implementation
The selection of directory-allocation and directory-management algorithms significantly affects the efficiency, performance, and reliability of the file system. In this section, we discuss the trade-offs involved in choosing one of these algorithms.
12.3.1 Linear List
The simplest method of implementing a directory is to use a linear list of file names with pointers to the data blocks. This method is simple to program but time-consuming to execute. To create a new file, we must first search the directory to be sure that no existing file has the same name. Then, we add a new entry at the end of the directory. To delete a file, we search the directory for the named file and then release the space allocated to it. To reuse the directory entry, we can do one of several things. We can mark the entry as unused (by assigning it a special name, such as an all-blank name, or by including a used–unused bit in each entry), or we can attach it to a list of free directory entries. A third alternative is to copy the last entry in the directory into the freed location and to decrease the length of the directory. A linked list can also be used to decrease the time required to delete a file.
The real disadvantage of a linear list of directory entries is that finding a file requires a linear search. Directory information is used frequently, and users will notice if access to it is slow. In fact, many operating systems implement a software cache to store the most recently used directory information. A cache hit avoids the need to constantly reread the information from disk. A sorted list allows a binary search and decreases the average search time. However, the requirement that the list be kept sorted may complicate creating and deleting files, since we may have to move substantial amounts of directory information to maintain a sorted directory. A more sophisticated tree data structure, such as a balanced tree, might help here. An advantage of the sorted list is that a sorted directory listing can be produced without a separate sort step.
12.3.2 Hash Table
Another data structure used for a file directory is a hash table. Here, a linear list stores the directory entries, but a hash data structure is also used. The hash table takes a value computed from the file name and returns a pointer to the file name in the linear list. Therefore, it can greatly decrease the directory search time. Insertion and deletion are also fairly straightforward, although some provision must be made for collisions—situations in which two file names hash to the same location.
The major difficulties with a hash table are its generally fixed size and the dependence of the hash function on that size. For example, assume that we make a linear-probing hash table that holds 64 entries. The hash function converts file names into integers from 0 to 63 (for instance, by using the remainder of a division by 64). If we later try to create a 65th file, we must enlarge the directory hash table—say, to 128 entries. As a result, we need a new hash function that must map file names to the range 0 to 127, and we must reorganize the existing directory entries to reflect their new hash-function values.
Alternatively, we can use a chained-overflow hash table. Each hash entry can be a linked list instead of an individual value, and we can resolve collisions by adding the new entry to the linked list. Lookups may be somewhat slowed, because searching for a name might require stepping through a linked list of colliding table entries. Still, this method is likely to be much faster than a linear search through the entire directory.
12.4 Allocation Methods
The direct-access nature of disks gives us flexibility in the implementation of files. In almost every case, many files are stored on the same disk. The main problem is how to allocate space to these files so that disk space is utilized effectively and files can be accessed quickly. Three major methods of allocating disk space are in wide use: contiguous, linked, and indexed. Each method has advantages and disadvantages. Although some systems support all three, it is more common for a system to use one method for all files within a file-system type.
12.4.1 Contiguous Allocation
Contiguous allocation requires that each file occupy a set of contiguous blocks on the disk. Disk addresses define a linear ordering on the disk. With this ordering, assuming that only one job is accessing the disk, accessing block b + 1 after block b normally requires no head movement. When head movement is needed (from the last sector of one cylinder to the first sector of the next cylinder), the head need only move from one track to the next. Thus, the number of disk seeks required for accessing contiguously allocated files is minimal, as is seek time when a seek is finally needed.
Contiguous allocation of a file is defined by the disk address and length (in block units) of the first block. If the file is n blocks long and starts at location b, then it occupies blocks b, b + 1, b + 2, …, b + n − 1. The directory entry for each file indicates the address of the starting block and the length of the area allocated for this file (Figure 12.5).
Accessing a file that has been allocated contiguously is easy. For sequential access, the file system remembers the disk address of the last block referenced and, when necessary, reads the next block. For direct access to block i of a file that starts at block b, we can immediately access block b + i. Thus, both sequential and direct access can be supported by contiguous allocation.
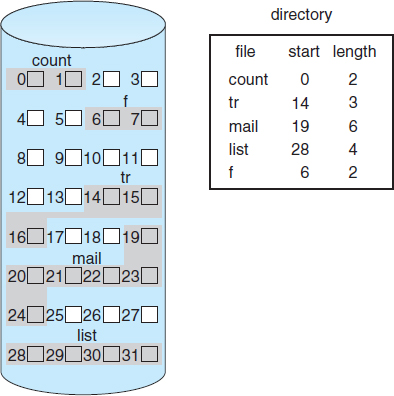
Figure 12.5 Contiguous allocation of disk space.
Contiguous allocation has some problems, however. One difficulty is finding space for a new file. The system chosen to manage free space determines how this task is accomplished; these management systems are discussed in Section 12.5. Any management system can be used, but some are slower than others.
The contiguous-allocation problem can be seen as a particular application of the general dynamic storage-allocation problem discussed in Section 8.3, which involves how to satisfy a request of size n from a list of free holes. First fit and best fit are the most common strategies used to select a free hole from the set of available holes. Simulations have shown that both first fit and best fit are more efficient than worst fit in terms of both time and storage utilization. Neither first fit nor best fit is clearly best in terms of storage utilization, but first fit is generally faster.
All these algorithms suffer from the problem of external fragmentation. As files are allocated and deleted, the free disk space is broken into little pieces. External fragmentation exists whenever free space is broken into chunks. It becomes a problem when the largest contiguous chunk is insufficient for a request; storage is fragmented into a number of holes, none of which is large enough to store the data. Depending on the total amount of disk storage and the average file size, external fragmentation may be a minor or a major problem.
One strategy for preventing loss of significant amounts of disk space to external fragmentation is to copy an entire file system onto another disk. The original disk is then freed completely, creating one large contiguous free space. We then copy the files back onto the original disk by allocating contiguous space from this one large hole. This scheme effectively compacts all free space into one contiguous space, solving the fragmentation problem. The cost of this compaction is time, however, and the cost can be particularly high for large hard disks. Compacting these disks may take hours and may be necessary on a weekly basis. Some systems require that this function be done off-line, with the file system unmounted. During this down time, normal system operation generally cannot be permitted, so such compaction is avoided at all costs on production machines. Most modern systems that need defragmentation can perform it on-line during normal system operations, but the performance penalty can be substantial.
Another problem with contiguous allocation is determining how much space is needed for a file. When the file is created, the total amount of space it will need must be found and allocated. How does the creator (program or person) know the size of the file to be created? In some cases, this determination may be fairly simple (copying an existing file, for example). In general, however, the size of an output file may be difficult to estimate.
If we allocate too little space to a file, we may find that the file cannot be extended. Especially with a best-fit allocation strategy, the space on both sides of the file may be in use. Hence, we cannot make the file larger in place. Two possibilities then exist. First, the user program can be terminated, with an appropriate error message. The user must then allocate more space and run the program again. These repeated runs may be costly. To prevent them, the user will normally overestimate the amount of space needed, resulting in considerable wasted space. The other possibility is to find a larger hole, copy the contents of the file to the new space, and release the previous space. This series of actions can be repeated as long as space exists, although it can be time consuming. The user need never be informed explicitly about what is happening, however; the system continues despite the problem, although more and more slowly.
Even if the total amount of space needed for a file is known in advance, preallocation may be inefficient. A file that will grow slowly over a long period (months or years) must be allocated enough space for its final size, even though much of that space will be unused for a long time. The file therefore has a large amount of internal fragmentation.
To minimize these drawbacks, some operating systems use a modified contiguous-allocation scheme. Here, a contiguous chunk of space is allocated initially. Then, if that amount proves not to be large enough, another chunk of contiguous space, known as an extent, is added. The location of a file's blocks is then recorded as a location and a block count, plus a link to the first block of the next extent. On some systems, the owner of the file can set the extent size, but this setting results in inefficiencies if the owner is incorrect. Internal fragmentation can still be a problem if the extents are too large, and external fragmentation can become a problem as extents of varying sizes are allocated and deallocated. The commercial Veritas file system uses extents to optimize performance. Veritas is a high-performance replacement for the standard UNIX UFS.
12.4.2 Linked Allocation
Linked allocation solves all problems of contiguous allocation. With linked allocation, each file is a linked list of disk blocks; the disk blocks may be scattered anywhere on the disk. The directory contains a pointer to the first and last blocks of the file. For example, a file of five blocks might start at block 9 and continue at block 16, then block 1, then block 10, and finally block 25 (Figure 12.6). Each block contains a pointer to the next block. These pointers are not made available to the user. Thus, if each block is 512 bytes in size, and a disk address (the pointer) requires 4 bytes, then the user sees blocks of 508 bytes.
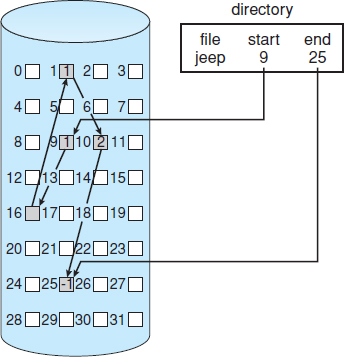
Figure 12.6 Linked allocation of disk space.
To create a new file, we simply create a new entry in the directory. With linked allocation, each directory entry has a pointer to the first disk block of the file. This pointer is initialized to null (the end-of-list pointer value) to signify an empty file. The size field is also set to 0. A write to the file causes the free-space management system to find a free block, and this new block is written to and is linked to the end of the file. To read a file, we simply read blocks by following the pointers from block to block. There is no external fragmentation with linked allocation, and any free block on the free-space list can be used to satisfy a request. The size of a file need not be declared when the file is created. A file can continue to grow as long as free blocks are available. Consequently, it is never necessary to compact disk space.
Linked allocation does have disadvantages, however. The major problem is that it can be used effectively only for sequential-access files. To find the ith block of a file, we must start at the beginning of that file and follow the pointers until we get to the ith block. Each access to a pointer requires a disk read, and some require a disk seek. Consequently, it is inefficient to support a direct-access capability for linked-allocation files.
Another disadvantage is the space required for the pointers. If a pointer requires 4 bytes out of a 512-byte block, then 0.78 percent of the disk is being used for pointers, rather than for information. Each file requires slightly more space than it would otherwise.
The usual solution to this problem is to collect blocks into multiples, called clusters, and to allocate clusters rather than blocks. For instance, the file system may define a cluster as four blocks and operate on the disk only in cluster units. Pointers then use a much smaller percentage of the file's disk space. This method allows the logical-to-physical block mapping to remain simple but improves disk throughput (because fewer disk-head seeks are required) and decreases the space needed for block allocation and free-list management. The cost of this approach is an increase in internal fragmentation, because more space is wasted when a cluster is partially full than when a block is partially full. Clusters can be used to improve the disk-access time for many other algorithms as well, so they are used in most file systems.
Yet another problem of linked allocation is reliability. Recall that the files are linked together by pointers scattered all over the disk, and consider what would happen if a pointer were lost or damaged. A bug in the operating-system software or a disk hardware failure might result in picking up the wrong pointer. This error could in turn result in linking into the free-space list or into another file. One partial solution is to use doubly linked lists, and another is to store the file name and relative block number in each block. However, these schemes require even more overhead for each file.
An important variation on linked allocation is the use of a file-allocation table (FAT). This simple but efficient method of disk-space allocation was used by the MS-DOS operating system. A section of disk at the beginning of each volume is set aside to contain the table. The table has one entry for each disk block and is indexed by block number. The FAT is used in much the same way as a linked list. The directory entry contains the block number of the first block of the file. The table entry indexed by that block number contains the block number of the next block in the file. This chain continues until it reaches the last block, which has a special end-of-file value as the table entry. An unused block is indicated by a table value of 0. Allocating a new block to a file is a simple matter of finding the first 0-valued table entry and replacing the previous end-of-file value with the address of the new block. The 0 is then replaced with the end-of-file value. An illustrative example is the FAT structure shown in Figure 12.7 for a file consisting of disk blocks 217, 618, and 339.
The FAT allocation scheme can result in a significant number of disk head seeks, unless the FAT is cached. The disk head must move to the start of the volume to read the FAT and find the location of the block in question, then move to the location of the block itself. In the worst case, both moves occur for each of the blocks. A benefit is that random-access time is improved, because the disk head can find the location of any block by reading the information in the FAT.
12.4.3 Indexed Allocation
Linked allocation solves the external-fragmentation and size-declaration problems of contiguous allocation. However, in the absence of a FAT, linked allocation cannot support efficient direct access, since the pointers to the blocks are scattered with the blocks themselves all over the disk and must be retrieved in order. Indexed allocation solves this problem by bringing all the pointers together into one location: the index block.
Each file has its own index block, which is an array of disk-block addresses. The ith entry in the index block points to the ith block of the file. The directory contains the address of the index block (Figure 12.8). To find and read the ith block, we use the pointer in the ith index-block entry. This scheme is similar to the paging scheme described in Section 8.5.
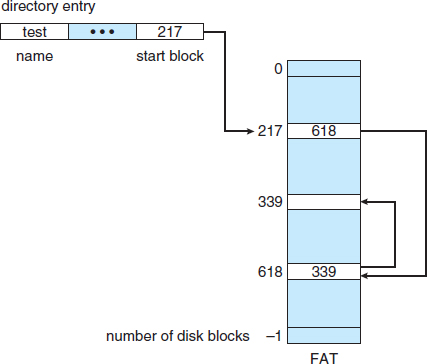
Figure 12.7 File-allocation table.
When the file is created, all pointers in the index block are set to null. When the ith block is first written, a block is obtained from the free-space manager, and its address is put in the ith index-block entry.
Indexed allocation supports direct access, without suffering from external fragmentation, because any free block on the disk can satisfy a request for more space. Indexed allocation does suffer from wasted space, however. The pointer overhead of the index block is generally greater than the pointer overhead of linked allocation. Consider a common case in which we have a file of only one or two blocks. With linked allocation, we lose the space of only one pointer per block. With indexed allocation, an entire index block must be allocated, even if only one or two pointers will be non-null.
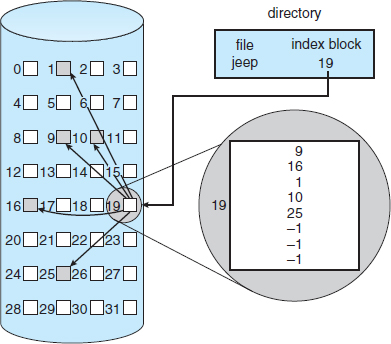
Figure 12.8 Indexed allocation of disk space.
This point raises the question of how large the index block should be. Every file must have an index block, so we want the index block to be as small as possible. If the index block is too small, however, it will not be able to hold enough pointers for a large file, and a mechanism will have to be available to deal with this issue. Mechanisms for this purpose include the following:
- Linked scheme. An index block is normally one disk block. Thus, it can be read and written directly by itself. To allow for large files, we can link together several index blocks. For example, an index block might contain a small header giving the name of the file and a set of the first 100 disk-block addresses. The next address (the last word in the index block) is null (for a small file) or is a pointer to another index block (for a large file).
- Multilevel index. A variant of linked representation uses a first-level index block to point to a set of second-level index blocks, which in turn point to the file blocks. To access a block, the operating system uses the first-level index to find a second-level index block and then uses that block to find the desired data block. This approach could be continued to a third or fourth level, depending on the desired maximum file size. With 4,096-byte blocks, we could store 1,024 four-byte pointers in an index block. Two levels of indexes allow 1,048,576 data blocks and a file size of up to 4 GB.
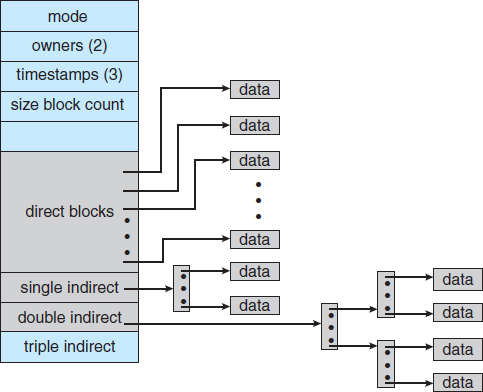
- Combined scheme. Another alternative, used in UNIX-based file systems, is to keep the first, say, 15 pointers of the index block in the file's inode. The first 12 of these pointers point to direct blocks; that is, they contain addresses of blocks that contain data of the file. Thus, the data for small files (of no more than 12 blocks) do not need a separate index block. If the block size is 4 KB, then up to 48 KB of data can be accessed directly. The next three pointers point to indirect blocks. The first points to a single indirect block, which is an index block containing not data but the addresses of blocks that do contain data. The second points to a double indirect block, which contains the address of a block that contains the addresses of blocks that contain pointers to the actual data blocks. The last pointer contains the address of a triple indirect block. (A UNIX inode is shown in Figure 12.9.)
Under this method, the number of blocks that can be allocated to a file exceeds the amount of space addressable by the 4-byte file pointers used by many operating systems. A 32-bit file pointer reaches only 232 bytes, or 4 GB. Many UNIX and Linux implementations now support 64-bit file pointers, which allows files and file systems to be several exbibytes in size. The ZFS file system supports 128-bit file pointers.
Indexed-allocation schemes suffer from some of the same performance problems as does linked allocation. Specifically, the index blocks can be cached in memory, but the data blocks may be spread all over a volume.
12.4.4 Performance
The allocation methods that we have discussed vary in their storage efficiency and data-block access times. Both are important criteria in selecting the proper method or methods for an operating system to implement.
Before selecting an allocation method, we need to determine how the systems will be used. A system with mostly sequential access should not use the same method as a system with mostly random access.
For any type of access, contiguous allocation requires only one access to get a disk block. Since we can easily keep the initial address of the file in memory, we can calculate immediately the disk address of the ith block (or the next block) and read it directly.
For linked allocation, we can also keep the address of the next block in memory and read it directly. This method is fine for sequential access; for direct access, however, an access to the ith block might require i disk reads. This problem indicates why linked allocation should not be used for an application requiring direct access.
As a result, some systems support direct-access files by using contiguous allocation and sequential-access files by using linked allocation. For these systems, the type of access to be made must be declared when the file is created. A file created for sequential access will be linked and cannot be used for direct access. A file created for direct access will be contiguous and can support both direct access and sequential access, but its maximum length must be declared when it is created. In this case, the operating system must have appropriate data structures and algorithms to support both allocation methods. Files can be converted from one type to another by the creation of a new file of the desired type, into which the contents of the old file are copied. The old file may then be deleted and the new file renamed.
Indexed allocation is more complex. If the index block is already in memory, then the access can be made directly. However, keeping the index block in memory requires considerable space. If this memory space is not available, then we may have to read first the index block and then the desired data block. For a two-level index, two index-block reads might be necessary. For an extremely large file, accessing a block near the end of the file would require reading in all the index blocks before the needed data block finally could be read. Thus, the performance of indexed allocation depends on the index structure, on the size of the file, and on the position of the block desired.
Some systems combine contiguous allocation with indexed allocation by using contiguous allocation for small files (up to three or four blocks) and automatically switching to an indexed allocation if the file grows large. Since most files are small, and contiguous allocation is efficient for small files, average performance can be quite good.
Many other optimizations are in use. Given the disparity between CPU speed and disk speed, it is not unreasonable to add thousands of extra instructions to the operating system to save just a few disk-head movements. Furthermore, this disparity is increasing over time, to the point where hundreds of thousands of instructions could reasonably be used to optimize head movements.
12.5 Free-Space Management
Since disk space is limited, we need to reuse the space from deleted files for new files, if possible. (Write-once optical disks allow only one write to any given sector, and thus reuse is not physically possible.) To keep track of free disk space, the system maintains a free-space list. The free-space list records all free disk blocks—those not allocated to some file or directory. To create a file, we search the free-space list for the required amount of space and allocate that space to the new file. This space is then removed from the free-space list. When a file is deleted, its disk space is added to the free-space list. The free-space list, despite its name, may not be implemented as a list, as we discuss next.
12.5.1 Bit Vector
Frequently, the free-space list is implemented as a bit map or bit vector. Each block is represented by 1 bit. If the block is free, the bit is 1; if the block is allocated, the bit is 0.
For example, consider a disk where blocks 2, 3, 4, 5, 8, 9, 10, 11, 12, 13, 17, 18, 25, 26, and 27 are free and the rest of the blocks are allocated. The free-space bit map would be
001111001111110001100000011100000 …
The main advantage of this approach is its relative simplicity and its efficiency in finding the first free block or n consecutive free blocks on the disk. Indeed, many computers supply bit-manipulation instructions that can be used effectively for that purpose. One technique for finding the first free block on a system that uses a bit-vector to allocate disk space is to sequentially check each word in the bit map to see whether that value is not 0, since a 0-valued word contains only 0 bits and represents a set of allocated blocks. The first non-0 word is scanned for the first 1 bit, which is the location of the first free block. The calculation of the block number is
(number of bits per word) × (number of 0-value words) + offset of first 1 bit.
Again, we see hardware features driving software functionality. Unfortunately, bit vectors are inefficient unless the entire vector is kept in main memory (and is written to disk occasionally for recovery needs). Keeping it in main memory is possible for smaller disks but not necessarily for larger ones. A 1.3-GB disk with 512-byte blocks would need a bit map of over 332 KB to track its free blocks, although clustering the blocks in groups of four reduces this number to around 83 KB per disk. A1-TB disk with 4-KB blocks requires 256 MB to store its bit map. Given that disk size constantly increases, the problem with bit vectors will continue to escalate as well.
12.5.2 Linked List
Another approach to free-space management is to link together all the free disk blocks, keeping a pointer to the first free block in a special location on the disk and caching it in memory. This first block contains a pointer to the next free disk block, and so on. Recall our earlier example (Section 12.5.1), in which blocks 2, 3, 4, 5, 8, 9, 10, 11, 12, 13, 17, 18, 25, 26, and 27 were free and the rest of the blocks were allocated. In this situation, we would keep a pointer to block 2 as the first free block. Block 2 would contain a pointer to block 3, which would point to block 4, which would point to block 5, which would point to block 8, and so on (Figure 12.10). This scheme is not efficient; to traverse the list, we must read each block, which requires substantial I/O time. Fortunately, however, traversing the free list is not a frequent action. Usually, the operating system simply needs a free block so that it can allocate that block to a file, so the first block in the free list is used. The FAT method incorporates free-block accounting into the allocation data structure. No separate method is needed.
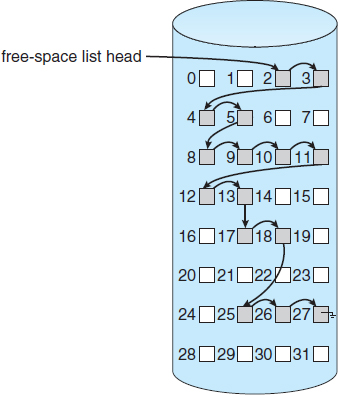
Figure 12.10 Linked free-space list on disk.
12.5.3 Grouping
A modification of the free-list approach stores the addresses of n free blocks in the first free block. The first n−1 of these blocks are actually free. The last block contains the addresses of another n free blocks, and so on. The addresses of a large number of free blocks can now be found quickly, unlike the situation when the standard linked-list approach is used.
12.5.4 Counting
Another approach takes advantage of the fact that, generally, several contiguous blocks may be allocated or freed simultaneously, particularly when space is allocated with the contiguous-allocation algorithm or through clustering. Thus, rather than keeping a list of n free disk addresses, we can keep the address of the first free block and the number (n) of free contiguous blocks that follow the first block. Each entry in the free-space list then consists of a disk address and a count. Although each entry requires more space than would a simple disk address, the overall list is shorter, as long as the count is generally greater than 1. Note that this method of tracking free space is similar to the extent method of allocating blocks. These entries can be stored in a balanced tree, rather than a linked list, for efficient lookup, insertion, and deletion.
12.5.5 Space Maps
Oracle's ZFS file system (found in Solaris and other operating systems) was designed to encompass huge numbers of files, directories, and even file systems (in ZFS, we can create file-system hierarchies). On these scales, metadata I/O can have a large performance impact. Consider, for example, that if the free-space list is implemented as a bit map, bit maps must be modified both when blocks are allocated and when they are freed. Freeing 1 GB of data on a 1-TB disk could cause thousands of blocks of bit maps to be updated, because those data blocks could be scattered over the entire disk. Clearly, the data structures for such a system could be large and inefficient.
In its management of free space, ZFS uses a combination of techniques to control the size of data structures and minimize the I/O needed to manage those structures. First, ZFS creates metaslabs to divide the space on the device into chunks of manageable size. A given volume may contain hundreds of metaslabs. Each metaslab has an associated space map. ZFS uses the counting algorithm to store information about free blocks. Rather than write counting structures to disk, it uses log-structured file-system techniques to record them. The space map is a log of all block activity (allocating and freeing), in time order, in counting format. When ZFS decides to allocate or free space from a metaslab, it loads the associated space map into memory in a balanced-tree structure (for very efficient operation), indexed by offset, and replays the log into that structure. The in-memory space mapis then an accurate representation of the allocated and free space in the metaslab. ZFS also condenses the map as much as possible by combining contiguous free blocks into a single entry. Finally, the free-space list is updated on disk as part of the transaction-oriented operations of ZFS. During the collection and sorting phase, block requests can still occur, and ZFS satisfies these requests from the log. In essence, the log plus the balanced tree is the free list.
12.6 Efficiency and Performance
Now that we have discussed various block-allocation and directory-management options, we can further consider their effect on performance and efficient disk use. Disks tend to represent a major bottleneck in system performance, since they are the slowest main computer component. In this section, we discuss a variety of techniques used to improve the efficiency and performance of secondary storage.
12.6.1 Efficiency
The efficient use of disk space depends heavily on the disk-allocation and directory algorithms in use. For instance, UNIX inodes are preallocated on a volume. Even an empty disk has a percentage of its space lost to inodes. However, by preallocating the inodes and spreading them across the volume, we improve the file system's performance. This improved performance results from the UNIX allocation and free-space algorithms, which try to keep a file's data blocks near that file's inode block to reduce seek time.
As another example, let's reconsider the clustering scheme discussed in Section 12.4, which improves file-seek and file-transfer performance at the cost of internal fragmentation. To reduce this fragmentation, BSD UNIX varies the cluster size as a file grows. Large clusters are used where they can be filled, and small clusters are used for small files and the last cluster of a file. This system is described in Appendix A.
The types of data normally kept in a file's directory (or inode) entry also require consideration. Commonly, a “last write date” is recorded to supply information to the user and to determine whether the file needs to be backed up. Some systems also keep a “last access date,” so that a user can determine when the file was last read. The result of keeping this information is that, whenever the file is read, a field in the directory structure must be written to. That means the block must be read into memory, a section changed, and the block written back out to disk, because operations on disks occur only in block (or cluster) chunks. So any time a file is opened for reading, its directory entry must be read and written as well. This requirement can be inefficient for frequently accessed files, so we must weigh its benefit against its performance cost when designing a file system. Generally, every data item associated with a file needs to be considered for its effect on efficiency and performance.
Consider, for instance, how efficiency is affected by the size of the pointers used to access data. Most systems use either 32-bit or 64-bit pointers throughout the operating system. Using 32-bit pointers limits the size of a file to 232, or 4 GB. Using 64-bit pointers allows very large file sizes, but 64-bit pointers require more space to store. As a result, the allocation and free-space-management methods (linked lists, indexes, and so on) use more disk space.
One of the difficulties in choosing a pointer size—or, indeed, any fixed allocation size within an operating system—is planning for the effects of changing technology. Consider that the IBM PC XT had a 10-MB hard drive and an MS-DOS file system that could support only 32 MB. (Each FAT entry was 12 bits, pointing to an 8-KB cluster.) As disk capacities increased, larger disks had to be split into 32-MB partitions, because the file system could not track blocks beyond 32 MB. As hard disks with capacities of over 100 MB became common, the disk data structures and algorithms in MS-DOS had to be modified to allow larger file systems. (Each FAT entry was expanded to 16 bits and later to 32 bits.) The initial file-system decisions were made for efficiency reasons; however, with the advent of MS-DOS Version 4, millions of computer users were inconvenienced when they had to switch to the new, larger file system. Solaris' ZFS file system uses 128-bit pointers, which theoretically should never need to be extended. (The minimum mass of a device capable of storing 2128 bytes using atomic-level storage would be about 272 trillion kilograms.)
As another example, consider the evolution of the Solaris operating system. Originally, many data structures were of fixed length, allocated at system startup. These structures included the process table and the open-file table. When the process table became full, no more processes could be created. When the file table became full, no more files could be opened. The system would fail to provide services to users. Table sizes could be increased only by recompiling the kernel and rebooting the system. With later releases of Solaris, almost all kernel structures were allocated dynamically, eliminating these artificial limits on system performance. Of course, the algorithms that manipulate these tables are more complicated, and the operating system is a little slower because it must dynamically allocate and deallocate table entries; but that price is the usual one for more general functionality.
12.6.2 Performance
Even after the basic file-system algorithms have been selected, we can still improve performance in several ways. As will be discussed in Chapter 13, most disk controllers include local memory to form an on-board cache that is large enough to store entire tracks at a time. Once a seek is performed, the track is read into the disk cache starting at the sector under the disk head (reducing latency time). The disk controller then transfers any sector requests to the operating system. Once blocks make it from the disk controller into main memory, the operating system may cache the blocks there.
Some systems maintain a separate section of main memory for a buffer cache, where blocks are kept under the assumption that they will be used again shortly. Other systems cache file data using a page cache. The page cache uses virtual memory techniques to cache file data as pages rather than as file-system-oriented blocks. Caching file data using virtual addresses is far more efficient than caching through physical disk blocks, as accesses interface with virtual memory rather than the file system. Several systems—including Solaris, Linux, and Windows —use page caching to cache both process pages and file data. This is known as unified virtual memory.
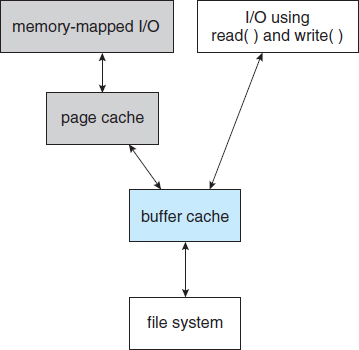
Figure 12.11 I/O without a unified buffer cache.
Some versions of UNIX and Linux provide a unified buffer cache. To illustrate the benefits of the unified buffer cache, consider the two alternatives for opening and accessing a file. One approach is to use memory mapping (Section 9.7); the second is to use the standard system calls read() and write(). Without a unified buffer cache, we have a situation similar to Figure 12.11. Here, the read() and write() system calls go through the buffer cache. The memory-mapping call, however, requires using two caches—the page cache and the buffer cache. A memory mapping proceeds by reading in disk blocks from the file system and storing them in the buffer cache. Because the virtual memory system does not interface with the buffer cache, the contents of the file in the buffer cache must be copied into the page cache. This situation, known as double caching, requires caching file-system data twice. Not only does it waste memory but it also wastes significant CPU and I/O cycles due to the extra data movement within system memory. In addition, inconsistencies between the two caches can result in corrupt files. In contrast, when a unified buffer cache is provided, both memory mapping and the read() and write() system calls use the same page cache. This has the benefit of avoiding double caching, and it allows the virtual memory system to manage file-system data. The unified buffer cache is shown in Figure 12.12.
Regardless of whether we are caching disk blocks or pages (or both), LRU (Section 9.4.4) seems a reasonable general-purpose algorithm for block or page replacement. However, the evolution of the Solaris page-caching algorithms reveals the difficulty in choosing an algorithm. Solaris allows processes and the page cache to share unused memory. Versions earlier than Solaris 2.5.1 made no distinction between allocating pages to a process and allocating them to the page cache. As a result, a system performing many I/O operations used most of the available memory for caching pages. Because of the high rates of I/O, the page scanner (Section 9.10.2) reclaimed pages from processes—rather than from the page cache—when free memory ran low. Solaris 2.6 and Solaris 7 optionally implemented priority paging, in which the page scanner gives priority to process pages over the page cache. Solaris 8 applied a fixed limit to process pages and the file-system page cache, preventing either from forcing the other out of memory. Solaris 9 and 10 again changed the algorithms to maximize memory use and minimize thrashing.
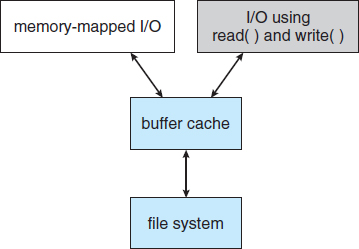
Figure 12.12 I/O using a unified buffer cache.
Another issue that can affect the performance of I/O is whether writes to the file system occur synchronously or asynchronously. Synchronous writes occur in the order in which the disk subsystem receives them, and the writes are not buffered. Thus, the calling routine must wait for the data to reach the disk drive before it can proceed. In an asynchronous write, the data are stored in the cache, and control returns to the caller. Most writes are asynchronous. However, metadata writes, among others, can be synchronous. Operating systems frequently include a flag in the open system call to allow a process to request that writes be performed synchronously. For example, databases use this feature for atomic transactions, to assure that data reach stable storage in the required order.
Some systems optimize their page cache by using different replacement algorithms, depending on the access type of the file. A file being read or written sequentially should not have its pages replaced in LRU order, because the most recently used page will be used last, or perhaps never again. Instead, sequential access can be optimized by techniques known as free-behind and read-ahead. Free-behind removes a page from the buffer as soon as the next page is requested. The previous pages are not likely to be used again and waste buffer space. With read-ahead, a requested page and several subsequent pages are read and cached. These pages are likely to be requested after the current page is processed. Retrieving these data from the disk in one transfer and caching them saves a considerable amount of time. One might think that a track cache on the controller would eliminate the need for read-ahead on a multiprogrammed system. However, because of the high latency and overhead involved in making many small transfers from the track cache to main memory, performing a read-ahead remains beneficial.
The page cache, the file system, and the disk drivers have some interesting interactions. When data are written to a disk file, the pages are buffered in the cache, and the disk driver sorts its output queue according to disk address. These two actions allow the disk driver to minimize disk-head seeks and to write data at times optimized for disk rotation. Unless synchronous writes are required, a process writing to disk simply writes into the cache, and the system asynchronously writes the data to disk when convenient. The user process sees very fast writes. When data are read from a disk file, the block I/O system does some read-ahead; however, writes are much more nearly asynchronous than are reads. Thus, output to the disk through the file system is often faster than is input for large transfers, counter to intuition.
12.7 Recovery
Files and directories are kept both in main memory and on disk, and care must be taken to ensure that a system failure does not result in loss of data or in data inconsistency. We deal with these issues in this section. We also consider how a system can recover from such a failure.
A system crash can cause inconsistencies among on-disk file-system data structures, such as directory structures, free-block pointers, and free FCB pointers. Many file systems apply changes to these structures in place. A typical operation, such as creating a file, can involve many structural changes within the file system on the disk. Directory structures are modified, FCBs are allocated, data blocks are allocated, and the free counts for all of these blocks are decreased. These changes can be interrupted by a crash, and inconsistencies among the structures can result. For example, the free FCB count might indicate that an FCB had been allocated, but the directory structure might not point to the FCB. Compounding this problem is the caching that operating systems do to optimize I/O performance. Some changes may go directly to disk, while others may be cached. If the cached changes do not reach disk before a crash occurs, more corruption is possible.
In addition to crashes, bugs in file-system implementation, disk controllers, and even user applications can corrupt a file system. File systems have varying methods to deal with corruption, depending on the file-system data structures and algorithms. We deal with these issues next.
12.7.1 Consistency Checking
Whatever the cause of corruption, a file system must first detect the problems and then correct them. For detection, a scan of all the metadata on each file system can confirm or deny the consistency of the system. Unfortunately, this scan can take minutes or hours and should occur every time the system boots. Alternatively, a file system can record its state within the file-system metadata. At the start of any metadata change, a status bit is set to indicate that the metadata is in flux. If all updates to the metadata complete successfully, the file system can clear that bit. If, however, the status bit remains set, a consistency checker is run.
The consistency checker—a systems program such as fsck in UNIX—compares the data in the directory structure with the data blocks on disk and tries to fix any inconsistencies it finds. The allocation and free-space-management algorithms dictate what types of problems the checker can find and how successful it will be in fixing them. For instance, if linked allocation is used and there is a link from any block to its next block, then the entire file can be reconstructed from the data blocks, and the directory structure can be recreated. In contrast, the loss of a directory entry on an indexed allocation system can be disastrous, because the data blocks have no knowledge of one another. For this reason, UNIX caches directory entries for reads; but any write that results in space allocation, or other metadata changes, is done synchronously, before the corresponding data blocks are written. Of course, problems can still occur if a synchronous write is interrupted by a crash.
12.7.2 Log-Structured File Systems
Computer scientists often find that algorithms and technologies originally used in one area are equally useful in other areas. Such is the case with the database log-based recovery algorithms. These logging algorithms have been applied successfully to the problem of consistency checking. The resulting implementations are known as log-based transaction-oriented (or journaling) file systems.
Note that with the consistency-checking approach discussed in the preceding section, we essentially allow structures to break and repair them on recovery. However, there are several problems with this approach. One is that the inconsistency may be irreparable. The consistency check may not be able to recover the structures, resulting in loss of files and even entire directories. Consistency checking can require human intervention to resolve conflicts, and that is inconvenient if no human is available. The system can remain unavailable until the human tells it how to proceed. Consistency checking also takes system and clock time. To check terabytes of data, hours of clock time may be required.
The solution to this problem is to apply log-based recovery techniques to file-system metadata updates. Both NTFS and the Veritas file system use this method, and it is included in recent versions of UFS on Solaris. In fact, it is becoming common on many operating systems.
Fundamentally, all metadata changes are written sequentially to a log. Each set of operations for performing a specific task is a transaction. Once the changes are written to this log, they are considered to be committed, and the system call can return to the user process, allowing it to continue execution. Meanwhile, these log entries are replayed across the actual file-system structures. As the changes are made, a pointer is updated to indicate which actions have completed and which are still incomplete. When an entire committed transaction is completed, it is removed from the log file, which is actually a circular buffer. A circular buffer writes to the end of its space and then continues at the beginning, overwriting older values as it goes. We would not want the buffer to write over data that had not yet been saved, so that scenario is avoided. The log may be in a separate section of the file system or even on a separate disk spindle. It is more efficient, but more complex, to have it under separate read and write heads, thereby decreasing head contention and seek times.
If the system crashes, the log file will contain zero or more transactions. Any transactions it contains were not completed to the file system, even though they were committed by the operating system, so they must now be completed. The transactions can be executed from the pointer until the work is complete so that the file-system structures remain consistent. The only problem occurs when a transaction was aborted—that is, was not committed before the system crashed. Any changes from such a transaction that were applied to the file system must be undone, again preserving the consistency of the file system. This recovery is all that is needed after a crash, eliminating any problems with consistency checking.
A side benefit of using logging on disk metadata updates is that those updates proceed much faster than when they are applied directly to the on-disk data structures. The reason is found in the performance advantage of sequential I/O over random I/O. The costly synchronous random metadata writes are turned into much less costly synchronous sequential writes to the log-structured file system's logging area. Those changes, in turn, are replayed asynchronously via random writes to the appropriate structures. The overall result is a significant gain in performance of metadata-oriented operations, such as file creation and deletion.
12.7.3 Other Solutions
Another alternative to consistency checking is employed by Network Appliance's WAFL file system and the Solaris ZFS file system. These systems never overwrite blocks with new data. Rather, a transaction writes all data and metadata changes to new blocks. When the transaction is complete, the metadata structures that pointed to the old versions of these blocks are updated to point to the new blocks. The file system can then remove the old pointers and the old blocks and make them available for reuse. If the old pointers and blocks are kept, a snapshot is created; the snapshot is a view of the file system before the last update took place. This solution should require no consistency checking if the pointer update is done atomically. WAFL does have a consistency checker, however, so some failure scenarios can still cause metadata corruption. (See Section 12.9 for details of the WAFL file system.)
ZFS takes an even more innovative approach to disk consistency. It never overwrites blocks, just like WAFL. However, ZFS goes further and provides checksumming of all metadata and data blocks. This solution (when combined with RAID) assures that data are always correct. ZFS therefore has no consistency checker. (More details on ZFS are found in Section 10.7.6.)
12.7.4 Backup and Restore
Magnetic disks sometimes fail, and care must be taken to ensure that the data lost in such a failure are not lost forever. To this end, system programs can be used to back up data from disk to another storage device, such as a magnetic tape or other hard disk. Recovery from the loss of an individual file, or of an entire disk, may then be a matter of restoring the data from backup.
To minimize the copying needed, we can use information from each file's directory entry. For instance, if the backup program knows when the last backup of a file was done, and the file's last write date in the directory indicates that the file has not changed since that date, then the file does not need to be copied again. A typical backup schedule may then be as follows:
- Day 1. Copy to a backup medium all files from the disk. This is called a full backup.
- Day 2. Copy to another medium all files changed since day 1. This is an incremental backup.
- Day 3. Copy to another medium all files changed since day 2.
.
.
.
- Day N. Copy to another medium all files changed since day N − 1. Then go back to day 1.
The new cycle can have its backup written over the previous set or onto a new set of backup media.
Using this method, we can restore an entire disk by starting restores with the full backup and continuing through each of the incremental backups. Of course, the larger the value of N, the greater the number of media that must be read for a complete restore. An added advantage of this backup cycle is that we can restore any file accidentally deleted during the cycle by retrieving the deleted file from the backup of the previous day.
The length of the cycle is a compromise between the amount of backup medium needed and the number of days covered by a restore. To decrease the number of tapes that must be read to do a restore, an option is to perform a full backup and then each day back up all files that have changed since the full backup. In this way, a restore can be done via the most recent incremental backup and the full backup, with no other incremental backups needed. The trade-off is that more files will be modified each day, so each successive incremental backup involves more files and more backup media.
A user may notice that a particular file is missing or corrupted long after the damage was done. For this reason, we usually plan to take a full backup from time to time that will be saved “forever.” It is a good idea to store these permanent backups far away from the regular backups to protect against hazard, such as a fire that destroys the computer and all the backups too. And if the backup cycle reuses media, we must take care not to reuse the media too many times—if the media wear out, it might not be possible to restore any data from the backups.
12.8 NFS
Network file systems are commonplace. They are typically integrated with the overall directory structure and interface of the client system. NFS is a good example of a widely used, well implemented client–server network file system. Here, we use it as an example to explore the implementation details of network file systems.
NFS is both an implementation and a specification of a software system for accessing remote files across LANs (or even WANs). NFS is part of ONC+, which most UNIX vendors and some PC operating systems support. The implementation described here is part of the Solaris operating system, which is a modified version of UNIX SVR4. It uses either the TCP or UDP/IP protocol (depending on the interconnecting network). The specification and the implementation are intertwined in our description of NFS. Whenever detail is needed, we refer to the Solaris implementation; whenever the description is general, it applies to the specification also.
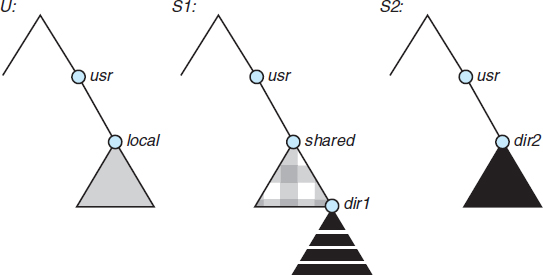
Figure 12.13 Three independent file systems.
There are multiple versions of NFS, with the latest being Version 4. Here, we describe Version 3, as that is the one most commonly deployed.
12.8.1 Overview
NFS views a set of interconnected workstations as a set of independent machines with independent file systems. The goal is to allow some degree of sharing among these file systems (on explicit request) in a transparent manner. Sharing is based on a client–server relationship. A machine may be, and often is, both a client and a server. Sharing is allowed between any pair of machines. To ensure machine independence, sharing of a remote file system affects only the client machine and no other machine.
So that a remote directory will be accessible in a transparent manner from a particular machine—say, from M1—a client of that machine must first carry out a mount operation. The semantics of the operation involve mounting a remote directory over a directory of a local file system. Once the mount operation is completed, the mounted directory looks like an integral subtree of the local file system, replacing the subtree descending from the local directory. The local directory becomes the name of the root of the newly mounted directory. Specification of the remote directory as an argument for the mount operation is not done transparently; the location (or host name) of the remote directory has to be provided. However, from then on, users on machine M1 can access files in the remote directory in a totally transparent manner.
To illustrate file mounting, consider the file system depicted in Figure 12.13, where the triangles represent subtrees of directories that are of interest. The figure shows three independent file systems of machines named U, S1, and S2. At this point, on each machine, only the local files can be accessed. Figure 12.14(a) shows the effects of mounting S1:/usr/shared over U:/usr/local. This figure depicts the view users on U have of their file system. After the mount is complete, they can access any file within the dir1 directory using the prefix /usr/local/dir1. The original directory /usr/local on that machine is no longer visible.
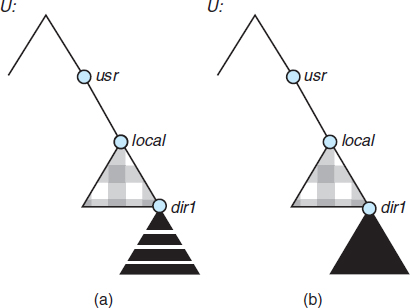
Figure 12.14 Mounting in NFS. (a) Mounts. (b) Cascading mounts.
Subject to access-rights accreditation, any file system, or any directory within a file system, can be mounted remotely on top of any local directory. Diskless workstations can even mount their own roots from servers. Cascading mounts are also permitted in some NFS implementations. That is, a file system can be mounted over another file system that is remotely mounted, not local. A machine is affected by only those mounts that it has itself invoked. Mounting a remote file system does not give the client access to other file systems that were, by chance, mounted over the former file system. Thus, the mount mechanism does not exhibit a transitivity property.
In Figure 12.14(b), we illustrate cascading mounts. The figure shows the result of mounting S2:/usr/dir2 over U:/usr/local/dir1, which is already remotely mounted from S1. Users can access files within dir2 on U using the prefix /usr/local/dir1. If a shared file system is mounted over a user's home directories on all machines in a network, the user can log into any workstation and get their home environment. This property permits user mobility.
One of the design goals of NFS was to operate in a heterogeneous environment of different machines, operating systems, and network architectures. The NFS specification is independent of these media. This independence is achieved through the use of RPC primitives built on top of an external data representation (XDR) protocol used between two implementation-independent interfaces. Hence, if the system's heterogeneous machines and file systems are properly interfaced to NFS, file systems of different types can be mounted both locally and remotely.
The NFS specification distinguishes between the services provided by a mount mechanism and the actual remote-file-access services. Accordingly, two separate protocols are specified for these services: a mount protocol and a protocol for remote file accesses, the NFS protocol. The protocols are specified as sets of RPCs. These RPCs are the building blocks used to implement transparent remote file access.
12.8.2 The Mount Protocol
The mount protocol establishes the initial logical connection between a server and a client. In Solaris, each machine has a server process, outside the kernel, performing the protocol functions.
A mount operation includes the name of the remote directory to be mounted and the name of the server machine storing it. The mount request is mapped to the corresponding RPC and is forwarded to the mount server running on the specific server machine. The server maintains an export list that specifies local file systems that it exports for mounting, along with names of machines that are permitted to mount them. (In Solaris, this list is the /etc/dfs/dfstab, which can be edited only by a superuser.) The specification can also include access rights, such as read only. To simplify the maintenance of export lists and mount tables, a distributed naming scheme can be used to hold this information and make it available to appropriate clients.
Recall that any directory within an exported file system can be mounted remotely by an accredited machine. A component unit is such a directory. When the server receives amount request that conforms to its export list, it returns to the client a file handle that serves as the key for further accesses to files within the mounted file system. The file handle contains all the information that the server needs to distinguish an individual file it stores. In UNIX terms, the file handle consists of a file-system identifier and an inode number to identify the exact mounted directory within the exported file system.
The server also maintains a list of the client machines and the corresponding currently mounted directories. This list is used mainly for administrative purposes—for instance, for notifying all clients that the server is going down. Only through addition and deletion of entries in this list can the server state be affected by the mount protocol.
Usually, a system has a static mounting preconfiguration that is established at boot time (/etc/vfstab in Solaris); however, this layout can be modified. In addition to the actual mount procedure, the mount protocol includes several other procedures, such as unmount and return export list.
12.8.3 The NFS Protocol
The NFS protocol provides a set of RPCs for remote file operations. The procedures support the following operations:
- Searching for a file within a directory
- Reading a set of directory entries
- Manipulating links and directories
- Accessing file attributes
- Reading and writing files
These procedures can be invoked only after a file handle for the remotely mounted directory has been established.
The omission of open and close operations is intentional. A prominent feature of NFS servers is that they are stateless. Servers do not maintain information about their clients from one access to another. No parallels to UNIX's open-files table or file structures exist on the server side. Consequently, each request has to provide a full set of arguments, including a unique file identifier and an absolute offset inside the file for the appropriate operations. The resulting design is robust; no special measures need be taken to recover a server after a crash. File operations must be idempotent for this purpose, that is, the same operation performed multiple times has the same effect as if it were only performed once. To achieve idempotence, every NFS request has a sequence number, allowing the server to determine if a request has been duplicated or if any are missing.
Maintaining the list of clients that we mentioned seems to violate the statelessness of the server. However, this list is not essential for the correct operation of the client or the server, and hence it does not need to be restored after a server crash. Consequently, it may include inconsistent data and is treated as only a hint.
A further implication of the stateless-server philosophy and a result of the synchrony of an RPC is that modified data (including indirection and status blocks) must be committed to the server's disk before results are returned to the client. That is, a client can cache write blocks, but when it flushes them to the server, it assumes that they have reached the server's disks. The server must write all NFS data synchronously. Thus, a server crash and recovery will be invisible to a client; all blocks that the server is managing for the client will be intact. The resulting performance penalty can be large, because the advantages of caching are lost. Performance can be increased by using storage with its own nonvolatile cache (usually battery-backed-up memory). The disk controller acknowledges the disk write when the write is stored in the nonvolatile cache. In essence, the host sees a very fast synchronous write. These blocks remain intact even after a system crash and are written from this stable storage to disk periodically.
A single NFS write procedure call is guaranteed to be atomic and is not intermixed with other write calls to the same file. The NFS protocol, however, does not provide concurrency-control mechanisms. A write() system call may be broken down into several RPC writes, because each NFS write or read call can contain up to 8 KB of data and UDP packets are limited to 1,500 bytes. As a result, two users writing to the same remote file may get their data intermixed. The claim is that, because lock management is inherently stateful, a service outside the NFS should provide locking (and Solaris does). Users are advised to coordinate access to shared files using mechanisms outside the scope of NFS.
NFS is integrated into the operating system via a VFS. As an illustration of the architecture, let's trace how an operation on an already-open remote file is handled (follow the example in Figure 12.15). The client initiates the operation with a regular system call. The operating-system layer maps this call to a VFS operation on the appropriate vnode. The VFS layer identifies the file as a remote one and invokes the appropriate NFS procedure. An RPC call is made to the NFS service layer at the remote server. This call is reinjected to the VFS layer on the remote system, which finds that it is local and invokes the appropriate file-system operation. This path is retraced to return the result. An advantage of this architecture is that the client and the server are identical; thus, a machine may be a client, or a server, or both. The actual service on each server is performed by kernel threads.
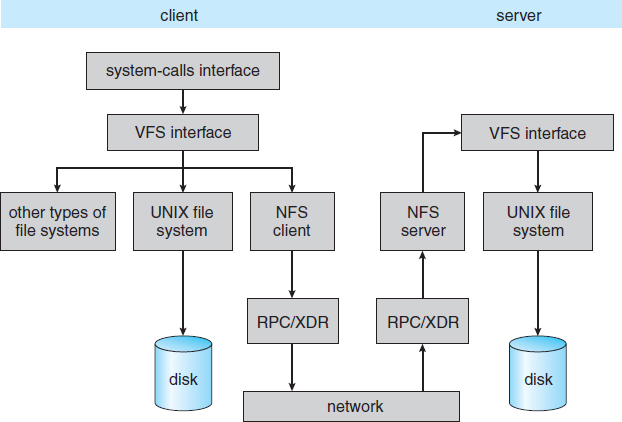
Figure 12.15 Schematic view of the NFS architecture.
12.8.4 Path-Name Translation
Path-name translation in NFS involves the parsing of a path name such as /usr/local/dir1/file.txt into separate directory entries, or components: (1) usr, (2) local, and (3) dir1. Path-name translation is done by breaking the path into component names and performing a separate NFS lookup call for every pair of component name and directory vnode. Once a mount point is crossed, every component lookup causes a separate RPC to the server. This expensive path-name-traversal scheme is needed, since the layout of each client's logical name space is unique, dictated by the mounts the client has performed. It would be much more efficient to hand a server a path name and receive a target vnode once a mount point is encountered. At any point, however, there might be another mount point for the particular client of which the stateless server is unaware.
So that lookup is fast, a directory-name-lookup cache on the client side holds the vnodes for remote directory names. This cache speeds up references to files with the same initial path name. The directory cache is discarded when attributes returned from the server do not match the attributes of the cached vnode.
Recall that some implementations of NFS allow mounting a remote file system on top of another already-mounted remote file system (a cascading mount). When a client has a cascading mount, more than one server can be involved in a path-name traversal. However, when a client does a lookup on a directory on which the server has mounted a file system, the client sees the underlying directory instead of the mounted directory.
12.8.5 Remote Operations
With the exception of opening and closing files, there is an almost one-to-one correspondence between the regular UNIX system calls for file operations and the NFS protocol RPCs. Thus, a remote file operation can be translated directly to the corresponding RPC. Conceptually, NFS adheres to the remote-service paradigm; but in practice, buffering and caching techniques are employed for the sake of performance. No direct correspondence exists between a remote operation and an RPC. Instead, file blocks and file attributes are fetched by the RPCs and are cached locally. Future remote operations use the cached data, subject to consistency constraints.
There are two caches: the file-attribute (inode-information) cache and the file-blocks cache. When a file is opened, the kernel checks with the remote server to determine whether to fetch or revalidate the cached attributes. The cached file blocks are used only if the corresponding cached attributes are up to date. The attribute cache is updated whenever new attributes arrive from the server. Cached attributes are, by default, discarded after 60 seconds. Both read-ahead and delayed-write techniques are used between the server and the client. Clients do not free delayed-write blocks until the server confirms that the data have been written to disk. Delayed-write is retained even when a file is opened concurrently, in conflicting modes. Hence, UNIX semantics (Section 11.5.3.1) are not preserved.
Tuning the system for performance makes it difficult to characterize the consistency semantics of NFS. New files created on a machine may not be visible elsewhere for 30 seconds. Furthermore, writes to a file at one site may or may not be visible at other sites that have this file open for reading. New opens of a file observe only the changes that have already been flushed to the server. Thus, NFS provides neither strict emulation of UNIX semantics nor the session semantics of Andrew (Section 11.5.3.2). In spite of these drawbacks, the utility and good performance of the mechanism make it the most widely used multi-vendor-distributed system in operation.
12.9 Example: The WAFL File System
Because disk I/O has such a huge impact on system performance, file-system design and implementation command quite a lot of attention from system designers. Some file systems are general purpose, in that they can provide reasonable performance and functionality for a wide variety of file sizes, file types, and I/O loads. Others are optimized for specific tasks in an attempt to provide better performance in those areas than general-purpose file systems. The write-anywhere file layout (WAFL) from Network Appliance is an example of this sort of optimization. WAFL is a powerful, elegant file system optimized for random writes.
WAFL is used exclusively on network file servers produced by Network Appliance and is meant for use as a distributed file system. It can provide files to clients via the NFS, CIFS, ftp, and http protocols, although it was designed just for NFS and CIFS. When many clients use these protocols to talk to a file server, the server may see a very large demand for random reads and an even larger demand for random writes. The NFS and CIFS protocols cache data from read operations, so writes are of the greatest concern to file-server creators.
WAFL is used on file servers that include an NVRAM cache for writes. The WAFL designers took advantage of running on a specific architecture to optimize the file system for random I/O, with a stable-storage cache in front. Ease of use is one of the guiding principles of WAFL. Its creators also designed it to include a new snapshot functionality that creates multiple read-only copies of the file system at different points in time, as we shall see.
The file system is similar to the Berkeley Fast File System, with many modifications. It is block-based and uses inodes to describe files. Each inode contains 16 pointers to blocks (or indirect blocks) belonging to the file described by the inode. Each file system has a root inode. All of the metadata lives in files. All inodes are in one file, the free-block map in another, and the free-inode map in a third, as shown in Figure 12.16. Because these are standard files, the data blocks are not limited in location and can be placed anywhere. If a file system is expanded by addition of disks, the lengths of the metadata files are automatically expanded by the file system.
Thus, a WAFL file system is a tree of blocks with the root inode as its base. To take a snapshot, WAFL creates a copy of the root inode. Any file or metadata updates after that go to new blocks rather than overwriting their existing blocks. The new root inode points to metadata and data changed as a result of these writes. Meanwhile, the snapshot (the old root inode) still points to the old blocks, which have not been updated. It therefore provides access to the file system just as it was at the instant the snapshot was made—and takes very little disk space to do so. In essence, the extra disk space occupied by a snapshot consists of just the blocks that have been modified since the snapshot was taken.
An important change from more standard file systems is that the free-block map has more than one bit per block. It is a bitmap with a bit set for each snapshot that is using the block. When all snapshots that have been using the block are deleted, the bit map for that block is all zeros, and the block is free to be reused. Used blocks are never overwritten, so writes are very fast, because a write can occur at the free block nearest the current head location. There are many other performance optimizations in WAFL as well.
Many snapshots can exist simultaneously, so one can be taken each hour of the day and each day of the month. A user with access to these snapshots can access files as they were at any of the times the snapshots were taken. The snapshot facility is also useful for backups, testing, versioning, and so on. WAFL's snapshot facility is very efficient in that it does not even require that copy-on-write copies of each data block be taken before the block is modified. Other file systems provide snapshots, but frequently with less efficiency. WAFL snapshots are depicted in Figure 12.17.
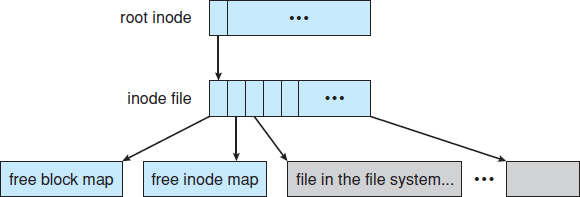
Figure 12.16 The WAFL file layout.
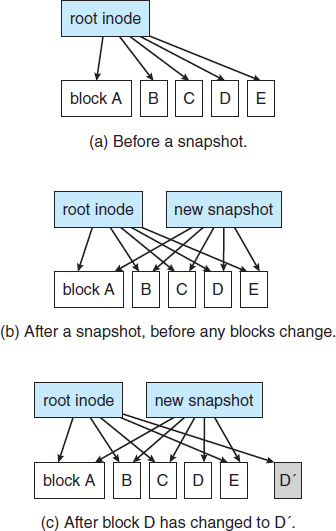
Figure 12.17 Snapshots in WAFL.
Newer versions of WAFL actually allow read–write snapshots, known as clones. Clones are also efficient, using the same techniques as shapshots. In this case, a read-only snapshot captures the state of the file system, and a clone refers back to that read-only snapshot. Any writes to the clone are stored in new blocks, and the clone's pointers are updated to refer to the new blocks. The original snapshot is unmodified, still giving a view into the file system as it was before the clone was updated. Clones can also be promoted to replace the original file system; this involves throwing out all of the old pointers and any associated old blocks. Clones are useful for testing and upgrades, as the original version is left untouched and the clone deleted when the test is done or if the upgrade fails.
Another feature that naturally results from the WAFL file system implementation is replication, the duplication and synchronization of a set of data over a network to another system. First, a snapshot of a WAFL file system is duplicated to another system. When another snapshot is taken on the source system, it is relatively easy to update the remote system just by sending over all blocks contained in the new snapshot. These blocks are the ones that have changed between the times the two snapshots were taken. The remote system adds these blocks to the file system and updates its pointers, and the new system then is a duplicate of the source system as of the time of the second snapshot. Repeating this process maintains the remote system as a nearly up-to-date copy of the first system. Such replication is used for disaster recovery. Should the first system be destroyed, most of its data are available for use on the remote system.
Finally, we should note that the ZFS file system supports similarly efficient snapshots, clones, and replication.
12.10 Summary
The file system resides permanently on secondary storage, which is designed to hold a large amount of data permanently. The most common secondary-storage medium is the disk.
Physical disks may be segmented into partitions to control media use and to allow multiple, possibly varying, file systems on a single spindle. These file systems are mounted onto a logical file system architecture to make them available for use. File systems are often implemented in a layered or modular structure. The lower levels deal with the physical properties of storage devices. Upper levels deal with symbolic file names and logical properties of files. Intermediate levels map the logical file concepts into physical device properties.
Any file-system type can have different structures and algorithms. A VFS layer allows the upper layers to deal with each file-system type uniformly. Even remote file systems can be integrated into the system's directory structure and acted on by standard system calls via the VFS interface.
The various files can be allocated space on the disk in three ways: through contiguous, linked, or indexed allocation. Contiguous allocation can suffer from external fragmentation. Direct access is very inefficient with linked allocation. Indexed allocation may require substantial overhead for its index block. These algorithms can be optimized in many ways. Contiguous space can be enlarged through extents to increase flexibility and to decrease external fragmentation. Indexed allocation can be done in clusters of multiple blocks to increase throughput and to reduce the number of index entries needed. Indexing in large clusters is similar to contiguous allocation with extents.
Free-space allocation methods also influence the efficiency of disk-space use, the performance of the file system, and the reliability of secondary storage. The methods used include bit vectors and linked lists. Optimizations include grouping, counting, and the FAT, which places the linked list in one contiguous area.
Directory-management routines must consider efficiency, performance, and reliability. A hash table is a commonly used method, as it is fast and efficient. Unfortunately, damage to the table or a system crash can result in inconsistency between the directory information and the disk's contents. A consistency checker can be used to repair the damage. Operating-system backup tools allow disk data to be copied to tape, enabling the user to recover from data or even disk loss due to hardware failure, operating system bug, or user error.
Network file systems, such as NFS, use client–server methodology to allow users to access files and directories from remote machines as if they were on local file systems. System calls on the client are translated into network protocols and retranslated into file-system operations on the server. Networking and multiple-client access create challenges in the areas of data consistency and performance.
Due to the fundamental role that file systems play in system operation, their performance and reliability are crucial. Techniques such as log structures and caching help improve performance, while log structures and RAID improve reliability. The WAFL file system is an example of optimization of performance to match a specific I/O load.
Practice Exercises
12.1 Consider a file currently consisting of 100 blocks. Assume that the file-control block (and the index block, in the case of indexed allocation) is already in memory. Calculate how many disk I/O operations are required for contiguous, linked, and indexed (single-level) allocation strategies, if, for one block, the following conditions hold. In the contiguous-allocation case, assume that there is no room to grow at the beginning but there is room to grow at the end. Also assume that the block information to be added is stored in memory.
- The block is added at the beginning.
- The block is added in the middle.
- The block is added at the end.
- The block is removed from the beginning.
- The block is removed from the middle.
- The block is removed from the end.
12.2 What problems could occur if a system allowed a file system to be mounted simultaneously at more than one location?
12.3 Why must the bit map for file allocation be kept on mass storage, rather than in main memory?
12.4 Consider a system that supports the strategies of contiguous, linked, and indexed allocation. What criteria should be used in deciding which strategy is best utilized for a particular file?
12.5 One problem with contiguous allocation is that the user must preallocate enough space for each file. If the file grows to be larger than the space allocated for it, special actions must be taken. One solution to this problem is to define a file structure consisting of an initial contiguous area (of a specified size). If this area is filled, the operating system automatically defines an overflow area that is linked to the initial contiguous area. If the overflow area is filled, another overflow area is allocated. Compare this implementation of a file with the standard contiguous and linked implementations.
12.6 How do caches help improve performance? Why do systems not use more or larger caches if they are so useful?
12.7 Why is it advantageous to the user for an operating system to dynamically allocate its internal tables? What are the penalties to the operating system for doing so?
12.8 Explain how the VFS layer allows an operating system to support multiple types of file systems easily.
Exercises
12.9 Consider a file system that uses a modifed contiguous-allocation scheme with support for extents. A file is a collection of extents, with each extent corresponding to a contiguous set of blocks. A key issue in such systems is the degree of variability in the size of the extents. What are the advantages and disadvantages of the following schemes?
- All extents are of the same size, and the size is predetermined.
- Extents can be of any size and are allocated dynamically.
- Extents can be of a few fixed sizes, and these sizes are predetermined.
12.10 Contrast the performance of the three techniques for allocating disk blocks (contiguous, linked, and indexed) for both sequential and random file access.
12.11 What are the advantages of the variant of linked allocation that uses a FAT to chain together the blocks of a file?
12.12 Consider a system where free space is kept in a free-space list.
- Suppose that the pointer to the free-space list is lost. Can the system reconstruct the free-space list? Explain your answer.
- Consider a file system similar to the one used by UNIX with indexed allocation. How many disk I/O operations might be required to read the contents of a small local file at /a/b/c? Assume that none of the disk blocks is currently being cached.
- Suggest a scheme to ensure that the pointer is never lost as a result of memory failure.
12.13 Some file systems allow disk storage to be allocated at different levels of granularity. For instance, a file system could allocate 4 KB of disk space as a single 4-KB block or as eight 512-byte blocks. How could we take advantage of this flexibility to improve performance? What modifications would have to be made to the free-space management scheme in order to support this feature?
12.14 Discuss how performance optimizations for file systems might result in difficulties in maintaining the consistency of the systems in the event of computer crashes.
12.15 Consider a file system on a disk that has both logical and physical block sizes of 512 bytes. Assume that the information about each file is already in memory. For each of the three allocation strategies (contiguous, linked, and indexed), answer these questions:
- How is the logical-to-physical address mapping accomplished in this system? (For the indexed allocation, assume that a file is always less than 512 blocks long.)
- If we are currently at logical block 10 (the last block accessed was block 10) and want to access logical block 4, how many physical blocks must be read from the disk?
12.16 Consider a file system that uses inodes to represent files. Disk blocks are 8 KB in size, and a pointer to a disk block requires 4 bytes. This file system has 12 direct disk blocks, as well as single, double, and triple indirect disk blocks. What is the maximum size of a file that can be stored in this file system?
12.17 Fragmentation on a storage device can be eliminated by recompaction of the information. Typical disk devices do not have relocation or base registers (such as those used when memory is to be compacted), so how can we relocate files? Give three reasons why recompacting and relocation of files are often avoided.
12.18 Assume that in a particular augmentation of a remote-file-access protocol, each client maintains a name cache that caches translations from file names to corresponding file handles. What issues should we take into account in implementing the name cache?
12.19 Explain why logging metadata updates ensures recovery of a file system after a file-system crash.
12.20 Consider the following backup scheme:
- Day 1. Copy to a backup medium all files from the disk.
- Day 2. Copy to another medium all files changed since day 1.
- Day 3. Copy to another medium all files changed since day 1.
This differs from the schedule given in Section 12.7.4 by having all subsequent backups copy all files modified since the first full backup. What are the benefits of this system over the one in Section 12.7.4? What are the drawbacks? Are restore operations made easier or more difficult? Explain your answer.
Programming Problems
The following exercise examines the relationship between files and inodes on a UNIX or Linux system. On these systems, files are represented with inodes. That is, an inode is a file (and vice versa). You can complete this exercise on the Linux virtual machine that is provided with this text. You can also complete the exercise on any Linux, UNIX, or Mac OS X system, but it will require creating two simple text files named file1.txt and file3.txt whose contents are unique sentences.
12.21 In the source code available with this text, open file1.txt and examine its contents. Next, obtain the inode number of this file with the command
ls -li file1.txt
This will produce output similar to the following:
16980 -rw-r--r-- 2 os os 22 Sep 14 16:13 file1.txt
where the inode number is boldfaced. (The inode number of file1.txt is likely to be different on your system.)
The UNIX ln command creates a link between a source and target file. This command works as follows:
ln [−s] <source file> <target file>
UNIX provides two types of links: (1) hard links and (2) soft links. A hard link creates a separate target file that has the same inode as the source file. Enter the following command to create a hard link between file1.txt and file2.txt:
ln file1.txt file2.txt
What are the inode values of file1.txt and file2.txt? Are they the same or different? Do the two files have the same—or different—contents?
Next, edit file2.txt and change its contents. After you have done so, examine the contents of file1.txt. Are the contents of file1.txt and file2.txt the same or different?
Next, enter the following command which removes file1.txt:
rm file1.txt
Does file2.txt still exist as well?
Now examine the man pages for both the rm and unlink commands. Afterwards, remove file2.txt by entering the command
strace rm file2.txt
The strace command traces the execution of system calls as the command rm file2.txt is run. What system call is used for removing file2.txt?
A soft link (or symbolic link) creates a new file that “points” to the name of the file it is linking to. In the source code available with this text, create a soft link to file3.txt by entering the following command:
ln −s file3.txt file4.txt
After you have done so, obtain the inode numbers of file3.txt and file4.txt using the command
ls -li file*.txt
Are the inodes the same, or is each unique? Next, edit the contents of file4.txt. Have the contents of file3.txt been altered as well? Last, delete file3.txt. After you have done so, explain what happens when you attempt to edit file4.txt.
Bibliographical Notes
The MS-DOS FAT system is explained in [Norton and Wilton (1988)]. The internals of the BSD UNIX system are covered in full in [McKusick and Neville-Neil (2005)]. Details concerning file systems for Linux can be found in [Love (2010)]. The Google file system is described in [Ghemawat et al. (2003)]. FUSE can be found at http://fuse.sourceforge.net.
Log-structured file organizations for enhancing both performance and consistency are discussed in [Rosenblum and Ousterhout (1991)], [Seltzer et al. (1993)], and [Seltzer et al. (1995)]. Algorithms such as balanced trees (and much more) are covered by [Knuth (1998)] and [Cormen et al. (2009)]. [Silvers (2000)] discusses implementing the page cache in the Net BSD operating system. The ZFS source code for space maps can be found at http://src.opensolaris.org/source/xref/onnv/onnv-gate/usr/src/uts/common/fs/zfs/space_map.c.
The network file system (NFS) is discussed in [Callaghan (2000)]. NFS Version 4 is a standard described at http://www.ietf.org/rfc/rfc3530.txt. [Ousterhout (1991)] discusses the role of distributed state in networked file systems. Log-structured designs for networked file systems are proposed in [Hartman and Ousterhout (1995)] and [Thekkath et al. (1997)]. NFS and the UNIX file system (UFS) are described in [Vahalia (1996)] and [Mauro and McDougall (2007)]. The NTFS file system is explained in [Solomon (1998)]. The Ext3 file system used in Linux is described in [Mauerer (2008)] and the WAFL file system is covered in [Hitz et al. (1995)]. ZFS documentation can be found at http://www.opensolaris.org/os/community/ZFS/docs.
Bibliography
[Callaghan (2000)] B. Callaghan, NFS Illustrated, Addison-Wesley (2000).
[Cormen et al. (2009)] T. H. Cormen, C. E. Leiserson, R. L. Rivest, and C. Stein, Introduction to Algorithms, Third Edition, MIT Press (2009).
[Ghemawat et al. (2003)] S. Ghemawat, H. Gobioff, and S.-T. Leung, “The Google File System”, Proceedings of the ACM Symposium on Operating Systems Principles (2003).
[Hartman and Ousterhout (1995)] J. H. Hartman and J. K. Ousterhout, “The Zebra Striped Network File System”, ACM Transactions on Computer Systems, Volume 13, Number 3 (1995), pages 274–310.
[Hitz et al. (1995)] D. Hitz, J. Lau, and M. Malcolm, “File System Design for an NFS File Server Appliance”, Technical report, NetApp (1995).
[Knuth (1998)] D. E. Knuth, The Art of Computer Programming, Volume 3: Sorting and Searching, Second Edition, Addison-Wesley (1998).
[Love (2010)] R. Love, Linux Kernel Development, Third Edition, Developer's Library (2010).
[Mauerer (2008)] W. Mauerer, Professional Linux Kernel Architecture, John Wiley and Sons (2008).
[Mauro and McDougall (2007)] J. Mauro and R. McDougall, Solaris Internals: Core Kernel Architecture, Prentice Hall (2007).
[McKusick and Neville-Neil (2005)] M. K. McKusick and G. V. Neville-Neil, The Design and Implementation of the FreeBSD UNIX Operating System, Addison Wesley (2005).
[Norton and Wilton (1988)] P. Norton and R. Wilton, The New Peter Norton Programmer's Guide to the IBM PC & PS/2, Microsoft Press (1988).
[Ousterhout (1991)] J. Ousterhout. “The Role of Distributed State”. In CMU Computer Science: a 25th Anniversary Commemorative, R. F. Rashid, Ed., Addison-Wesley (1991).
[Rosenblum and Ousterhout (1991)] M. Rosenblum and J. K. Ousterhout, “The Design and Implementation of a Log-Structured File System”, Proceedings of the ACM Symposium on Operating Systems Principles (1991), pages 1–15.
[Seltzer et al. (1993)] M. I. Seltzer, K. Bostic, M. K. McKusick, and C. Staelin, “An Implementation of a Log-Structured File System for UNIX”, USENIX Winter (1993), pages 307–326.
[Seltzer et al. (1995)] M. I. Seltzer, K. A. Smith, H. Balakrishnan, J. Chang, S. McMains, and V. N. Padmanabhan, “File System Logging Versus Clustering: A Performance Comparison”, USENIX Winter (1995), pages 249–264.
[Silvers (2000)] C. Silvers, “UBC: An Efficient Unified I/O and Memory Caching Subsystem for NetBSD”, USENIX Annual Technical Conference—FREENIX Track (2000).
[Solomon (1998)] D. A. Solomon, Inside Windows NT, Second Edition, Microsoft Press (1998).
[Thekkath et al. (1997)] C. A. Thekkath, T. Mann, and E. K. Lee, “Frangipani: A Scalable Distributed File System”, Symposium on Operating Systems Principles (1997), pages 224–237.
[Vahalia (1996)] U. Vahalia, Unix Internals: The New Frontiers, Prentice Hall (1996).