
Chapter 12
Vehicular Networks: Macroscopic and Microscopic Mobility Models
Modeling mobility in a vehicular network is a very challenging task. In fact, vehicular mobility displays several features that, on the one hand, can be difficult to model and, on the other hand, have a deep impact on a vehicle's mobility behavior. Examples of distinguishing features of vehicular mobility are:
Given these features, it is evident why the “model accuracy” vs. “simulation running time” tradeoff, which is present in next generation wireless network mobility modeling in general, becomes especially critical in vehicular network models. On the one hand, using simplistic (but fast!) mobility models typically generates highly inaccurate simulation results, due to the fact that some of features 1, 2, or 3 above are not included in the model. On the other hand, a full-fledged vehicular mobility model including accurate road maps, traffic rules, and driver behavior models is typically cumbersome and computationally intensive, and difficult to use in vehicular network simulation. Thus, an adequate tradeoff between model accuracy and simulation running time should be carefully evaluated, depending on the network designer's needs.
One possible way of addressing this tradeoff is to take into consideration the geographical scope of interest. According to geographical scope, vehicular mobility models can be classified as macro- or micro-models. In this chapter, we will briefly describe the main features of models in each of these classes.
12.1 Vehicular Mobility Models: The Macroscopic View
Macroscopic vehicular mobility models are used to model traffic flow in relatively large geographical regions—in the order of hundreds or even thousands of square kilometers. Macroscopic mobility models are mostly used by transportation engineers to estimate the amount of traffic flowing along the main roads in a region of interest. In turn, accurate traffic flow estimates can be used, for example, to optimize road traffic management, to study the effects of introducing new arterial roads, etc.
Given the relatively large geographical scope of interest, vehicular mobility is modeled at a coarse granularity. In particular, individual vehicles are not modeled; instead, relationships between traffic flow characteristics of interest in the road network. such as vehicle density, mean speed, etc., are modeled through a suitably defined system of partial differential equations. While driver behavior is typically not modeled in macroscopic mobility models, some traffic rules such as speed limits can be used as constraints on the system of equations modeling traffic flow in the road network.
The process of simulating vehicular mobility using a macroscopic mobility model is typically composed of four steps, as depicted in Figure 12.1:
Figure 12.1 The four steps in macroscopic vehicular mobility simulation.
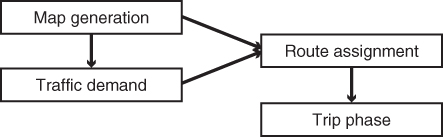
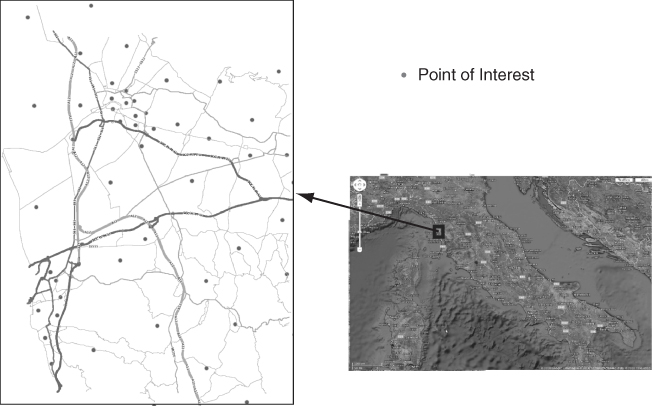
Figure 12.2 Example of a macroscopic mobility map of a region surrounding the city of Pisa, Italy (courtesy of Aleph SrL).
If the goal is, for instance, to estimate the impact on traffic of introducing a new road in the road system, the four-step process above can be repeated several times using different maps, until the “optimal” location of the new road is identified.
Given the relatively large geographical scope and lack of modeling individual vehicles, macroscopic mobility models are not very useful in vehicular network simulation, other than generating realistic traffic input values for microscopic mobility models (see next section). For this reason, in the following we will restrict our attention to the class of microscopic mobility models, which are briefly introduced in the next section and treated in detail in the next chapter.
12.2 Vehicular Mobility Models: The Microscopic View
Unlike macroscopic models, microscopic mobility models aim to give a detailed view of vehicular mobility, where the behavior of a single vehicle is modeled. Clearly, given that each vehicle traveling on the road is modeled, with current computational capabilities the simulation of a moderate number of vehicles (in the order of several thousand at most) can be undertaken. So, unless a scenario with very low vehicle density is modeled, this upper bound on the number of modeled vehicles imposes an upper bound on the size of the geographical region of interest. With current technology, microscopic mobility models can be used to simulate regions of the size of a large metropolitan area (tens of square kilometers).
The necessary steps for simulating vehicular mobility with a microscopic mobility model are similar to those for macroscopic simulation:
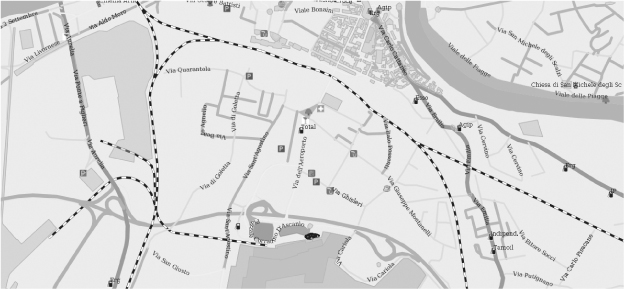
Figure 12.3 Example of a microscopic mobility map, reporting a portion of the city of Pisa, Italy (courtesy of Francesca Martelli).
12.3 Further Reading
As mentioned at the end of Section 12.1, in the next chapter we will describe in detail some representative microscopic mobility models. The reader interested in gaining a better understanding of macroscopic vehicular mobility models (also called traffic flow models) is referred to the several surveys (Bellomo et al. 2002; Coscia et al. 2007) and books (Kerner 2009) on the topic.
Bellomo N, Delitala M and Coscia V 2002 On the mathematical theory of vehicular traffic flow I: Fluid dynamic and kinetic modeling. Mathematical Models and Methods in Applied Sciences 12, 1801–1843.
Coscia V, Delitala M and Frasca P 2007 On the mathematical theory of vehicular traffic flow II: Discrete velocity kinetic models. International Journal of Non-Linear Mechanics 42, 411–421.
Google 2011 http://maps.google.com.
Kerner B 2009 Introduction to Modern Traffic Flow Theory and Control. Springer, Berlin.
MapQuest 2011 http://www.mapquest.com.