
6
Sense and Avoid Concepts: Vehicle-Based SAA Systems (Vehicle-to-Vehicle)
Št![]() pán Kop
pán Kop![]() iva, David Šišlák and Michal P
iva, David Šišlák and Michal P![]() chou
chou![]() ek
ek
6.1 Introduction
The various scenarios of unmanned aerial vehicles (UAVs) deployment require the ability to navigate UAVs in unknown terrain. The UAV, while fulfilling its mission objectives, has to avoid static obstacles as well as moving obstacles like other UAVs, airplanes, balloons or areas with bad weather forecast or bad weather conditions. Furthermore, if the UAV enters commercially controlled airspace, it needs to be able to sense and avoid the potential conflicts considering the air-traffic control regulations.
The concepts for development of automated systems providing the sense and avoid capability (also referred to as collision detection and resolution systems, CDR) came mainly from two domains. The first one is the air-traffic management domain, where automated tools like Traffic Collision Avoidance System (TCAS) [1] and Precision Runway Monitor (PRM) [2] are used to increase safety and fluency of the air-traffic. The second one is the artificial intelligence research and particularly robotics, where scientists investigated the trajectory planning and obstacle avoidance algorithms for aerial, ground, and maritime systems.
Various approaches to CDR systems, differences and similarities and categorization of the systems have been introduced in the literature. Krozel [3] and Kuchar [4] presented surveys of collision detection and resolution methods. Zeghal [5] conducted a survey of force field collision detection and resolution methods and finally Albaker [6] introduced the survey of CDR methods for UAVs.
6.2 Conflict Detection and Resolution Principles
To discuss the conflict detection and resolution principles, the conflict has to be defined first. The conflict is an event in which the horizontal or vertical Euclidian distance between two aircrafts breaks the minimal defined separation criterion. The criterion varies based on the airspace the UAV operates in and may also be different for different UAVs. For illustration, currently in civilian air-traffic the en-route horizontal separation criterion is 5 NM and the vertical one is 1,000 ft for the airspace between the ground and the flight level 290. The horizontal and vertical separation criteria form a cylindrical airspace volume around the UAV called the safety zone (SZ). The safety zone may not under any circumstances be violated by any other UAV. For different CDR systems different horizontal and vertical criteria may be applied.
The function of the collision detection and resolution system is to detect the collision and provide the resolution in the form of an evasion maneuver which is executed by the UAV’s autopilot. The general block diagram of the CDR unit is presented in Figure 6.1. The CDR system has five basic functions: sensing, trajectory prediction, conflict detection, conflict resolution, and evasion maneuver generation.
Figure 6.1 The general architecture of the collision detection and resolution system
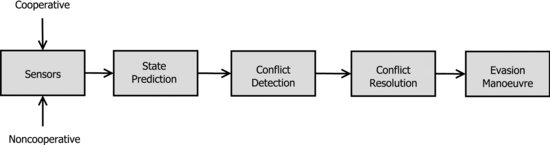
6.2.1 Sensing
The CDR system monitors the surrounding environment for both static and dynamic obstacles using onboard sensors represented by the sensors block in Figure 6.1. There are two types of sensor: cooperative and non-cooperative ones.
The cooperative sensors provide the ability to sense the environment and to communicate with aircrafts equipped with the same type of sensors by establishing a communication link. One example of the cooperative sensor is the Automatic Dependent Surveillance Broadcast (ADS-B) [7]. This device transfers the longitude, latitude, altitude, speed, and UAV identification. Some other cooperative sensors even allow exchanging the whole flight plans.
The non-cooperative sensors sense the environment in order to get information about the obstacles and airplanes. There are no communication links among the airplanes and the sensor information needs to be processed in order to get the correct environment state knowledge. Currently used non-cooperative sensor technologies include inertial measurement unit, laser range finders, stereo camera systems, single moving cameras, and radars. Using the active radar is limited to the large UAV systems, whereas small cameras together with picture recognition software may be used even on small systems like the Procerus UAV (Figure 6.2). The non-cooperative sensors for UAVs are described in [8].
Figure 6.2 The Procerus UAV. Note the passive sensor – gimbal moving camera in the bottom part of the airframe

6.2.2 Trajectory Prediction
To detect and resolve a conflict, it is necessary to compare the trajectory of the UAV and the trajectory of the sensed object. The trajectory is produced by the trajectory computation unit from the raw sensor information gathered on the input. In [4], there are three basic models of trajectory prediction methods and we add one more.
Figure 6.3 Trajectory prediction based on the samples from sensors: (a) the nominal method – the trajectory is predicted directly from the sensor data; (b) the worst-case prediction – range of possible maneuvers performed by the opponent aircraft; (c) the flight plan exchange – the flight plan representation using the safety zone and waypoints
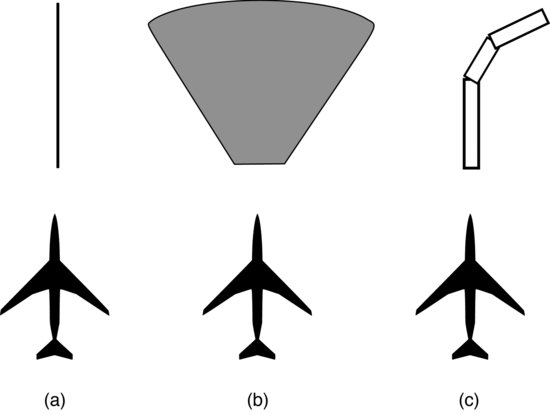
In the nominal method (Figure 6.3(a)), the trajectory is predicted directly from the sensor data without considering the possibility of any uncertainty or change. The output of the nominal trajectory predictor is a single trajectory computed from several last sensor scans. The trajectory may be computed using different methods, i.e. linear prediction, Taylor series prediction, or prediction using the Kalman filter. The nominal method prediction is suitable for short-term predictions, where the probability of change is relatively low.
The worst-case prediction (Figure 6.3(b)), is another modeling approach. This method covers the whole range of maneuvers the aircraft may perform and using a lookahead time parameter computes the area where the aircraft may occur. This area is then considered as the predicted trajectory.
In the probabilistic prediction approach, the uncertainties are used to model the potential variations in the trajectory. To construct this model, all possible trajectories are generated (like for the worst-case prediction) and each trajectory is evaluated by the probability function. The probabilistic prediction is a trade-off between the nominal method and the worst-case prediction. The probabilistic prediction method is the most general one, the decisions may be made based on the likelihood of the conflict.
The flight plan exchange approach is bound to cooperative sensors only. The aircrafts exchange parts of their flight plans, the precise trajectory is known and no prediction is needed. The plans are exchanged as a set of way-points together with the safety zone parameters (Figure 6.3(c)). The advantage of this approach is the exact knowledge of the future trajectory. The disadvantage is the higher bandwidth required for the data transmission.
6.2.3 Conflict Detection
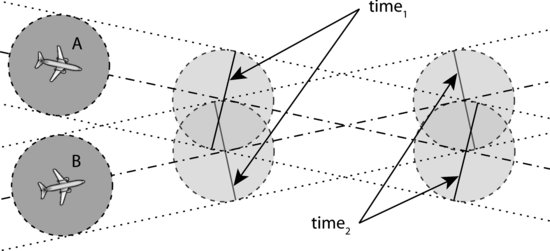
Conflict is detected based on the flight plan representation obtained from the trajectory prediction unit. The unit checks the flight plans of both airplanes and checks whether the safety zone of any airplane has been violated. If so, the parameters of the conflict (position of the conflicting airplanes and times of possible conflicts) are passed to the conflict resolution unit. In Figure 6.4, there is a conflict with its start and end time.
Figure 6.4 Conflict detection on the exchanged flight plans of two aircrafts. The conflict is detected when one (or both) aircraft violates the safety zone of the other one
6.2.4 Conflict Resolution
The conflict resolution block resolves the collision using one of the collision avoidance methods. The methods covered in this survey are: rule-based methods (RB), game theory methods (GT), field methods (F), geometric methods (G), numerical optimization methods (NO), combined methods (C), multi-agent methods (MA), and other methods (O).
The rule-based methods use a set of prescribed rules to avoid conflict. The sets of rules are fixed during the system design phase and originally were inspired by the visual flight rules (VFR) known from the civilian air-traffic domain. Even though the rule-based methods optimize the solution in the phase where the rules are designed, the set of pre-described rules is then fixed and has to be the same for all airplanes in the shared airspace. It is not possible to integrate further intentions and needs of a particular airplane into the conflict resolution process. The major advantage of the rule-based methods is the simplicity and fast implementation during the flight. There is no or very limited communication flow required among airplanes.
In the game theory methods, the authors model the conflict as a two-player differential game. These algorithms are useful mainly for non-cooperative conflict resolution. The methods are used for short-term conflict resolution, because they work with airplane states only. The cooperative conflict resolution methods are typically mid-term and long-term ones.
The field methods treat each airplane as a charged particle and are very close to a reactive control mechanism. Based on the current configuration (e.g. position of other airplanes, weather condition, considered uncertainty), the field is computed. Then, the UAV based on its own position in this field applies the control action depending on the current state of the airplane with respect to the field. The evasion maneuvers are then generated based on the repulsive forces between the fields. The advantage of the method is its relatively easy implementation. The major disadvantage of these methods is the computationally intensive phase where the field is computed. The field has to be updated when the current configuration is updated. Another major disadvantage appears if the UAV physical parameters are considered – field methods may come with solutions that produce maneuvers which may not be executed by the UAVs and have to be filtered. Similarly to the previous game approaches, these methods are not suitable for long-term airplane operation optimization.
Geometrical approaches consider in many cases the whole trajectory of the airplane while it avoids observed solution. Various approaches optimize given objective functions while they are searching for the proper evasion maneuver. In many cases, these methods are considering only collision of two airplanes and for multi-collision situations they come with sub-optimal approaches or sequential application of collision of two airplanes where safety is not guaranteed. Geometrical optimization is a very complex problem, especially if all available actions like change of heading, velocity, and altitude are considered.
The numerical optimization methods use a kinematic model of the vehicle together with a set of constraints and use cost metrics for the maneuver generation. The optimal evasion maneuver is then computed based on the most desired constraints. The major benefit of these methods is that the optimization criterion is clearly formalized and the final control is optimized with respect to the given problem definition. With increasing number of airplanes the problem becomes analytically unsolvable. The limitation of considered time horizon simplifies the problem. However, it is very hard to integrate airspace limitations like excluded airspaces (special use airspaces) and ground surface. Similarly, there cannot be integrated weather conditions.
The multi-agent methods use the multi-agent framework for solution generation. Each aircraft is controlled by one agent. The agents are able to communicate together and to negotiate about the solution using various utility functions.
6.2.5 Evasion Maneuvers
The evasion maneuver block in Figure 6.1 is responsible for the realization of the evasion maneuver proposed by the conflict resolution block. The basic evasion maneuvers are speed-up, slow-down, keep the same speed, turn-left, turn-right, climb, and descend. It is also possible to combine these maneuvers together, i.e. change speed while performing the turn maneuver.
6.3 Categorization of Conflict Detection and Resolution Approaches
In this section, the comprehensive categorization of recently published CDR methods is provided.
6.3.1 Taxonomy
The taxonomy tree taking the most important CDR design attributes has been designed, see Figure 6.5. In the top scheme level there are five basic attributes: sensing technology, trajectory prediction, conflict detection, conflict resolution, and maneuver realization. These attributes correspond to the five basic blocks in the conflict detection and resolution general architecture as presented in Figure 6.1. We have used these basic attributes with minor changes to classify CDR methods. For the CDR methods, it is often the case that the concepts have not been validated on the real hardware yet. We can hardly classify which sensors are utilized by the given method, so we have omitted the sensor attribute. We have classified the methods based on the conflict resolution method, conflict detection, and supported evasion maneuvers. Please check Table 6.1 for the values of the attributes.
Figure 6.5 The conflict resolution and detection taxonomy. The top five attributes are used for model classification
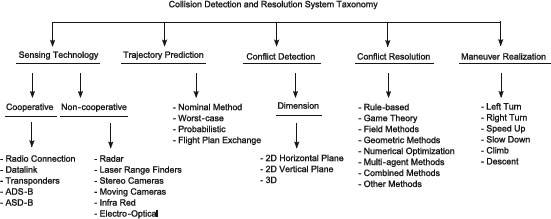
Table 6.1 Attributes and abbreviations used for the CDR classification
| Rule-based (RB) | |
| Game theoretical (GT) | |
| Field (F) | |
| Geometric (G) | |
| Conflict resolution methods | |
| Numerical optimization (NO) | |
| Multi-agent (MA) | |
| Combined (C) | |
| Others (O) | |
| 2D-horizontal plane (HP) | |
| Conflict detection dimensions | 2D-vertical plane (VP) |
| 3D (3D) | |
| Nominal (N) | |
| Worst-case (WC) | |
| Trajectory prediction | Probabilistic (P) |
| Flight plan exchange (FP) | |
| Speed change (SC) | |
| Evasion maneuvers | Turn (T) |
| Altitude change (AC) |
The following part describes the evaluated models. The models are presented in sets based on the used conflict resolution methods. For each method, there is also a table that categorizes the models. The models have been divided into the following categories, where each category is described in its own section. Section 6.3.2 contains rule-based approaches where a conflict resolution maneuver is pre-described for a certain type of observed potential conflict. Section 6.3.3 provides a review of algorithms based on the game theoretic approach where all potential maneuvers of opposing airplanes are considered while searching for its own maneuver. Section 6.3.4 presents force, potential, and vortex field approaches which are used for establishing the current airplane control inputs. Section 6.3.5 summarizes algorithms considering geometrical representation of a collision situation while searching for an evasion maneuver. Section 6.3.6 contains conflict resolution algorithms formulated as an optimization problem minimizing an objective function. Section 6.3.7 presents collision avoidance methods combining various algorithms. Section 6.3.8 summarizes existing multi-agent approaches for air-traffic conflict resolution. Section 6.3.9 contains all other methods related to air-traffic control which do not explicitly belong to one of the previous categories.
6.3.2 Rule-Based Methods
Schild [9] designed a set of rules for autonomous separation for en-route air-traffic. His approach considers the following three evaluation objectives: (i) safe inter-aircraft separation, (ii) minimum number of maneuvers used, and (iii) maximum efficiency in additional time and fuel provided. The rules are derived from many optimization tasks considering optimization functions based on these three objectives. Thus, the result of this approach is a set of rules where for each rule there is defined an activation condition specified in the form of mutual position and orientation of airplanes. These rules are defined for two airplanes. For multiple airplanes, these rules are applied sequentially and the stability of this rule-based system is validated in his work. The presented system may be used for the UAVs as well.
Table 6.2 Rule-based models
Hwang et al. [10, 11] described the protocol-based N-aircraft method for multiple-aircraft conflict avoidance. It is assumed that each airplane’s position, heading, and velocity are available to all involved airplanes, nominal trajectories of airplanes are at constant altitude and heading, and all airplanes initiate conflict resolution maneuvers at the same time and at once. The velocity is then constant along the maneuver. The multi-airplane conflict resolution is presented as (i) an exact conflict and (ii) an inexact conflict. In the first case, the exact conflict, original trajectories of all airplanes collide at a point which helped to derive a closed-form analytic solution for the required heading change. This case is unrealistic for more than two airplanes but motivates the solution for the general case. In the second case, the inexact conflict, conflict points of multiple airplanes do not coincide. The velocity change is considered for the inexact conflict.
Hwang et al. construct a finite partition of the airspace around the conflict and derive a protocol for resolving the worst-case conflict within each partition. Thus the conflict resolution method is formulated as a rule which is easily understandable and implemented by all aircrafts involved in the conflict. It is shown that the solution is robust to uncertainties in the airplane’s position, heading, velocity, and also with respect to asynchronous maneuvers where airplanes do not necessarily change their heading at the same time. The resulting method is not optimal in the sense of the deviation from the desired trajectory. However, it is implementable in real time, and always guarantees a safe conflict resolution. The method requires only few numerical computations.
Classification of rule-based methods according to the defined taxonomy is in Table 6.2. Even though these approaches optimize the solution in the phase where the rules are designed, the set of pre-described rules is then fixed and has to be the same for all airplanes in the shared airspace. It is not possible to integrate further intentions and needs of a particular airplane into the conflict resolution process. The major advantage of the rule-based approach is its simplicity and fast implementation during the flight. It requires no communication or very limited communication flow among UAVs.
6.3.3 Game Theory Methods
Lachner [12] investigated a worst-case approach based on pursuit-evasion differential games [13]. An evader (correct UAV) tries to avoid a collision against all possible pursuer’s maneuvers. The solution of such a differential game provides a strategy which guarantees a best possible control against all unknown disturbances of an opponent’s actions. He represents an optimal conflict resolution strategy along a lot of optimal paths which is used to synthesize a conflict resolution strategy globally by means of Taylor series expansions.
Table 6.3 Game theory models
Zhang et al. [14] formulated the conflict resolution problem as a differential game too. They apply the Lie–Poisson reduction on the dual of the Lie algebra of the special Euclidean group. The reduced Hamiltonian dynamics is then derived and can be integrated explicitly backwards in time. They use a hybrid automata to describe the solution to the reduced dynamics as well as the aircraft maneuvers in the game. The safe portion of the target frontier set is calculated and the conflict resolution solution is derived as the safe portion of this boundary.
Later, Bayen et al. [15] applied a differential game formulated for a two-vehicle collision avoidance problem to the derivation of an alerting logic for conflict in high-altitude air-traffic. Using computational methods based on level sets, the three-dimensional solution of the game is calculated. The solution is employed to define unsafe regions for each pair of aircraft in the relevant airspace, and these regions are used as a metric to indicate if loss of separation could occur. Their approach considers the worst case based on the airplane kinematic configuration. Classification of these methods is presented in Table 6.3.
6.3.4 Field Methods
Duong et al. [16, 17] presented a technique in which a force field generated by an intruding airplane produces a conflict resolution action and a force from the flight plan generates an attracting action. The work further extends [18], where a distributed conflict is proposed using a resolution algorithm based on a symmetrical force field method. The resolution maneuver is generated using a relatively simple equation. However, the resolution maneuver may have several discontinuities which aircraft cannot follow and the safety cannot be proven for multi-airplane maneuvers. A review of different approaches based on force fields for airborne conflict resolution is described in [5].
Hu et al. [19] calculated the probability of conflict between two airplanes by modeling the airplane motion as a deterministic trajectory with addition in a scaled Brownian motion perturbation. The authors have considered only the two-dimensional case, where both airplanes fly at the same altitude. The probability of a conflict becomes the probability that a Brownian motion escapes from a time-varying safe region. Brownian motion integrates a measure of the probability of each path, where paths of large deviation are less likely than paths of small deviation. Their approach provides a closed-form formalism with approximations considering both finite and infinite time-horizon cases, which makes its implementation computationally inexpensive and enables fast derivation of a resolution algorithm.
Table 6.4 Field models
Eby et al. [20--22] proposed the distributed conflict resolution method derived from the potential field model. Their self-organizational approach utilizes the concept of the force field. Airplanes are represented by positive charges and airplanes’ destinations by negative charges. Positive charges tend to be drawn toward the fixed negative charge because of the mutual attraction of their opposite charges. At the same time, the positive particles tend to maintain distance between each other because of the mutual repulsion of their like charges. The authors demonstrate that their approach is robust in a complex multi-airplane conflict. The algorithm is more complex when compensating distance dependency between an airplane and its destination. Also, there is a modification which guarantees a minimum separation among airplanes. They also studied communication failures and restricted maneuverability constraints.
Prandini et al. [23--25] studied the safety in the three-dimensional airplane flight. In their study, the airplane future position during the flight is predicted based on a stochastic model that incorporates the information on the airplane flight plan and takes into account the presence of wind as the main source of uncertainty on the airplane motion. In [26], this approach is extended with Markov chain approximation of the stochastic processes modeling the motion of the aircrafts for the mid-term model. For the predicted aircraft positions along some finite time horizon, the authors integrate additive wind perturbations to the airplane’s velocity. The spatial correlation structure for the wind perturbations is driven by distance of airplanes – for two closer airplanes, they use stronger correlation between the perturbations to airplanes’ velocities. The probability of conflict is computed using the Markov chain state space which is obtained by discretizing the region around the position where the encounter occurs. In [27], they introduced a switching diffusion model to predict the future positions of an airplane following a given flight plan adopting the modeling framework of stochastic hybrid systems [28]. The weak approximation of the switching diffusion through a Markov chain is used to develop a numerical algorithm for computing an estimate of the probability that the airplane enters an unsafe region of the airspace or comes too close to another airplane.
In [29], Prandini et al. proposed conflict resolution where the design of an optimal conflict resolution maneuver is based on the airplane intent information. The intent information is made robust against the uncertainty affecting the airplane future positions by a randomized stochastic optimization method. In such a way, they account for a probabilistic description of the uncertainty affecting the aircraft motion and avoid the excessive computational load of a pure Monte Carlo stochastic optimization method. Table 6.4 summarizes field methods and presents their classification according to the taxonomy.
6.3.5 Geometric Methods
Ota et al. [30] proposed a method which produces an avoidance trajectory in both the horizontal and vertical planes of motion based on the geometric relationship between the airplane and the threats. The authors have introduced the new concept ‘threat map,’ which is used to describe moving threats as static threats. Thus, motion planning for dynamic threats is reduced to path planning for stationary threat avoidance. The threat map is regularly updated and the velocity direction of the airplane is calculated to avoid the threats. They use the ‘risk space’ to model a threat. Airplanes avoiding the risk space keep a safe separation from threats.
Chiang et al. [31] proposed an approach based on computational geometry, where the flight is represented as a Delaunay diagram [32]. Their resolution algorithm is computationally intensive in construction of non-intersecting tubes in that diagram representation.
Bilimoria [33] proposed a geometric optimization approach to the aircraft conflict resolution, utilizing information on current positions and velocity vectors. The resolutions are optimal in the sense that they minimize the velocity vector changes required for conflict resolution, which results in minimum deviations from the nominal trajectory. His approach utilizes the geometric characteristics of airplane trajectories along with intuitive reasoning to provide conflict resolution maneuvers from a closed-form analytic solution. The algorithm provides an optimal combination of heading and speed changes for conflict resolution in the horizontal plane.
For two airplanes, it is shown that the analytical solution is optimal. The solution has been validated by comparison with numerical solutions from a compute-intensive optimization process utilizing a semi-definite programming approach. Multi-airplane conflicts are resolved sequentially – each aircraft resolving its most immediate conflict at each update cycle. The successive application of pairwise conflict resolution cannot guarantee safety for multiple-aircraft conflicts, as shown in [10].
Hu et al. [34, 35] designed optimal coordinated maneuvers for the multiple airplane conflict resolution. They proposed an energy function to select, among all the conflict-free maneuvers, the optimal one. Their cost function incorporates a priority mechanism that favors those maneuvers where the airplane with lower priority assumes more responsibility in resolving the predicted conflicts. The resolution maneuvers involve changes in heading, speed, and altitude as well. For the conflict of two airplanes, they provide a geometric construction and a numerical algorithm for computing the optimal resolution maneuvers. For the multi-airplane case, they use an approximation scheme to compute a sub-optimal solution.
Christodoulou et al. [36] formalized the three-dimensional air-traffic collision problem as a mixed-integer nonlinear programming problem. The optimization function is defined as the total flight time of all airplanes avoiding all possible conflicts. They considered only maneuvers considering velocity changes. In [37], they used neural networks trained with examples prepared through the nonlinear programming to avoid three-dimensional collisions. However, this extension works with velocity maneuvers which optimize the velocity changes. Their neural network predicts the optimal velocity change of many airplanes in order to avoid imminent conflict. The authors train the neural network by randomly generated conflict situations along with the generated optimal solution computed as a nonlinear optimization.
Luongo et al. [38] proposed an optimal three-dimensional geometrical solution for aircraft non-cooperative collision avoidance. The authors derived the analytical solution as a proper kinematic optimization problem based on a geometric approach. Their approach combines all control variables (velocity, heading, and vertical changes). In a pairwise collision avoidance, they continuously update the velocity of the airplane in order to keep safety surrounding the other airplane which is considered as an intruder. The algorithm doesn’t consider fixed obstacles and the limited airspace, e.g. terrain surface, special use airspaces. Up to now, their solution handles collisions of two airplanes only.
Table 6.5 Geometric methods

Pappas et al. [39] presented the method for crossing the metering fix by a set of aircrafts based on the mixed integer geometric programming. For ordering of the aircrafts above the fixed point they consider obtaining the utility function from the airlines.
In [40] the authors describe the method of CDR that uses a simple geometric approach. Two UAVs are treated as point masses with constant velocity. The authors discuss en-route aircrafts that build the information database based on the ADS-B updates. The algorithm calculates the PCA (point of closest approach) and evaluates the earliest collision between two UAVs. The paper proposes one resolution maneuvering logic called the vector sharing resolution. Using the miss distance vector in PCA, the algorithm proposes directions for two UAVs to share the conflict region. With these directions, UAVs are going to maneuver cooperatively. Taxonomy of presented geometric methods is provided in Table 6.5.
6.3.6 Numerical Optimization Approaches
Durand et al. [41] proposed predefined maneuvers which are used to construct a multi-airplane conflict resolution maneuver to solve en-route conflicts. The authors formally define conflict as a constrained optimization problem minimizing the delays due to the conflict resolution. Their method uses an optimal problem solver which is based on a stochastic optimization technique using genetic algorithms to generate each resolution maneuver successively. They demonstrate the method on many experiments where a genetic algorithm is very efficient and solves conflicts in a real-time situation. Later in [42], they use the genetic algorithm for training a neural network which is then used to solve conflicts between two airplanes.
Menon et al. [43] proposed a conflict resolution algorithm based on the quasi-linearization method. They used the nonlinear point-mass airplane models with integrated operational constraints. They compute a conflict resolution trajectory with two different costs: (i) deviation from the original trajectory as a square of the perturbation from the nominal trajectories and (ii) a linear combination of total flight time and fuel consumption. The optimization process gives the three-dimensional optimal multi-airplane conflict resolution but the optimization process is in general computationally intensive.
Frazzoli et al. [44] used randomized searches to choose one from all possible cross patterns and uses a convex optimization on the chosen cross pattern to obtain a resolution maneuver minimizing energy. They show that the planar multi-airplane conflict resolution problem accounting for all possible crossing patterns among airplanes can be recast as a non-convex quadratically constrained program. They show that there exist efficient numerical relaxations for this type of problem. These relaxations lead to a random search technique to compute feasible and locally optimal conflict-free strategies.
Bicchi et al. [45] proposed the planning optimal conflict resolution method for kinematic models of airplanes flying in the horizontal plane with constant cruise speed and curvature bounds. The conflict resolution is formulated as an optimal control problem to minimize the flight time. The solution was used as the decentralized hybrid system for mobile agents evolving on the plane [46, 47].
Pallotino et al. [48, 49] described two different formulations of the multi-airplane conflict resolution as a mixed-integer linear program. In the first case, only velocity changes are considered. In the second case, only heading maneuver changes are planned. The linear formalization of the problem is quickly solved with existing solvers in contrast to the nonlinear model presented in [45]. The primary benefit of this approach is its real-time implementation. The authors prove that a decentralized adaptation of the algorithm is possible with a given look-ahead distance considering the worst-case maneuvering requirements during state transitions as an other airplane becomes visible.
Raghunathan et al. [50] described the problem of the optimal cooperative three-dimensional conflict resolution with multiple airplanes as the rigorous numerical trajectory optimization – minimize a certain objective function while the safe separation between each airplane pair is maintained. They model an airplane as nonlinear point-mass dynamics. The optimal control problem is converted to a finite-dimensional nonlinear program by the use of collocation on finite elements. The nonlinear problem is solved by the use of an interior point algorithm that incorporates a line search method. They propose a reliable initialization strategy that yields a feasible solution.
Šišlák et al. [51] present the non-cooperative CDR used in the cases when the communication between planes is not possible. Such a situation can happen, for example, when the communication device on board the UAV is broken or if the other aircraft intentionally refuses to communicate (an enemy). Classical non-cooperative collision avoidance utilizing optimization algorithms like [52, 53] can optimally solve a collision with only one non-cooperative object. Such methods can fail for more non-cooperative objects. Therefore, the authors have designed the method based on the dynamic no-flight zones. The designed method is based on the path planning using A* algorithm [54], which is capable of planning a flight path which doesn’t intersect defined no-flight zones. The algorithm is responsible for the coordination of all operations needed to avoid potential future collisions of the UAV and an object representing a non-cooperative one. The event that triggers the conflict resolution process is information obtained from the sensors (radar) providing the position of an unknown object in the local area. The observation is used for the update of the solver knowledge base. The collision point is defined by an intersection of the current UAV’s flight plan and the predicted flight trajectory of the non-cooperative object. The algorithm uses the linear prediction estimating the future object trajectory including current velocity, which requires two last positions with time information. The prediction provides both predicted collision point position and time information. The detected collision point is wrapped by a dynamic no-flight zone. All no-flight zones are implemented as binary octant trees [55].
Table 6.6 Numerical optimization methods
Šišlák et al. [56, 57] present the decentralized collision avoidance algorithm utilizing a solution of the defined optimization problem where efficiency criteria collision penalties and airplanes’ missions are integrated in an objective function. The optimal control for UAVs is a set of actions which minimize the objective function and thus solve collisions as well. They use the probability collectives (PC) framework [58, 59] as an optimization solver. The PC is a stochastic optimizer using probabilistic operators optimizing over a variable space. The major benefit of the PC optimizer is that the whole optimization process can be distributed among several agents controlling airplanes – several parts can be performed simultaneously. Two different implementation approaches are then used for PC deployment: (i) parallelized optimization and (ii) centralized optimization. In the first approach, the PC optimization process is done cooperatively by a group of UAVs. Each optimized variable from the PC is mapped to one UAV. This approach can fully profit from a parallelized execution of the PC optimization but on the other hand it requires a complex negotiation protocol. The second approach requires collection of optimization inputs, selection of a host where the optimization will be performed, and distribution of the solution to all involved UAVs. The process integrated mechanism (PIM) [60] was used, which automatically takes care of synchronization and communication issues utilizing migration of the coordination process among UAVs. On the other hand, such an approach cannot utilize the parallelization potential of the stochastic optimization. Taxonomy of these methods is included in Table 6.6.
6.3.7 Combined Methods
Pappas et al. [61, 62] proposed an automated decentralized conflict resolution scheme based on a hybrid system including both (i) non-cooperative dynamic game and (ii) coordinated resolution based on predefined control laws. The basic component of their collision avoidance architecture is the long-range conflict prediction component. This component identifies the set of airplanes involved in potential conflicts. Once this set of airplanes is identified, their approach assumes that no new airplane will enter the set until all conflicts are resolved. If a new airplane is likely to enter that set, an extended problem including this airplane is formulated.
The first attempt to resolve the conflict is to perform the non-cooperative collision avoidance with no coordination among airplanes. In this case, airplanes are considered as players in a non-cooperative, zero-sum dynamic game [63]. Each airplane is aware of the possible actions of others. Actions of other airplanes are modeled as disturbances. Assuming a saddle solution to the game exists, the airplane chooses an optimal policy assuming the worst possible disturbance. The resulting solution involves switching between different modes of operation and can be represented as a hybrid automaton. The performance requirements for each airplane are encoded in various cost functions and the game is won whenever the cost function exceeds a certain threshold. The performance requirement is encoded by the distance between two agents which should never fall below a minimum threshold – known as a separation distance. If the saddle solution of the game is safe (the cost function exceeds a certain threshold), the airplane follows the policy dictated by the saddle solution and no coordination is used.
If the saddle solution of the game is not safe, partial coordination between airplanes is used in order to reduce the disturbance set. During the partial coordination, homogenous airplanes exchange their disturbance sets for which a safe solution exists for their game. If the intersection of these reduced disturbance sets is nonempty then collision can be avoided by simply reducing the possible actions of each airplane. With heterogenous airplanes, where each airplane is ranked with unique priority, airplanes may choose their own policy as long as it doesn’t interfere with the policies of the higher ranked agents. Where the reduction of disturbance sets still doesn’t lead to the safe solution, the full cooperative collision avoidance is applied. In this case, airplanes follow predefined maneuvers which are proven to be safe – for example, the right-hand rule. The coordination among airplanes is in the form of predefined communication protocols and control laws which have been proven to satisfy performance requirements.
In [61, 62], only the heading control for airplanes is considered. In the subsequent extensions of this work [64, 65], there is addressed the non-cooperative part of the hybrid architecture described above where the game is modeled by a finite automata with differential equations associated with each state and results in the hybrid system which is safe by design. The automata implementing a constant altitude conflict resolution is provided, considering both (i) resolution by angular velocity (heading changes) and (ii) resolution by linear velocity (speed changes). In [66, 67], verification is provided that conflict resolution maneuvers resolve the initial conflict and are safe. Košecká et al. [68, 69] used potential and vector field techniques for multiple airplane motion planning. The hybrid system technique introduced above utilizes the coordination between airplanes using a series of horizontal and vertical planar avoidance maneuvers resulting in two-and-a-half-dimensional solutions.
Krozel et al. [70] proposed an optimal control theory [71] to maximize the miss distance for short-term conflicts. Their solution considers only short-term conflict for two airplanes in a deterministic setting. They introduced a tactical alert zone around an airplane which is used by the optimal control strategy to provide a resolution maneuver based on an economical conflict resolution strategy with safety integrated as a constraint. The resolution strategy is the result of the optimization function where the closest approach is maximized. They apply Euler–Lagrange equations for the optimal control. Moreover, initially only the two-dimensional case is considered which provides heading or velocity maneuvers only. Later in [72], they extended the approach to provide the fully three-dimensional solution considering also altitude maneuvers for the conflict resolution.
In [3, 73], they extended the tactical approach with the strategic level which provides the conflict resolution for mid-term collisions. They model the strategic conflict detection with a non-deterministic analysis by introducing a conflict probability map. The strategic strategy optimizes economics while it maintains safety as the constraint. The strategic conflict resolution strategy analyzes the geometry of heading, speed, and altitude maneuvers and estimates the direct operating constant for these maneuvers.
Gross et al. [74] used a mixed geometric and collision cone approach known from ground robotics [75] for collision avoidance of two airplanes in the three-dimensional environment. For the most general cases, they derived analytical results using numerical optimization techniques. The results provided by their algorithm are optimal as they tend to minimize the velocity vector changes and thus result in minimum deviations from the nominal trajectory and avoid the conflict. Similarly to [38], the mixed approach combines changes in velocity, heading, and vertical changes together. They integrate implicit bounds on the airspeed and turning rates to enforce realistic scenarios.
Table 6.7 Combined methods
Šišlák et al. [76] present a rule-based approach to conflict detection and resolution using the multi-agent framework to model the system. The rule-based collision solver is a domain-dependent algorithm. It is based on the visual flight rules defined by the FAA. The airspace around the aircraft is divided into four sectors. First, the type of collision between airplanes is identified and the specific conflict type is detected based on the angle between the direction vectors of the concerned airplanes projected to the ground plane. For head-on conflict the airplanes avoid each other by both of them turning to the right. For a rear collision, there are two subcases: (i) the front aircraft is faster and the airplanes do not change their current flight plans; (ii) the rear airplane is faster and the airplane has to change its intended flight plan so that it turns to the right and passes the front airplane without endangering it. For a side collision, one of the aircrafts (say airplane A) needs to slow down its speed so that it reaches the collision point later than the other airplane (say airplane B). If this is not possible due to the minimal flight speed defined for each airplane type, then airplane A slows down as much as possible and shifts its intended flight plan point to the right so there is no collision between the two flight plans. For a side collision, airplane B has lower traffic priority. Aircraft A changes its flight plan by increasing its flight speed so that it passes the collision point before airplane B. Airplane A only accelerates as much as needed.
Angelov et al. [77] present a passive approach to conflict detection and resolution. A collision is detected based only on the bearings of the aircraft. The method estimates the risk based on the current and passed bearings. The risk estimator uses a Gaussian. Once a collision is detected, the maneuver based on the worst-case scenario is initiated. After avoiding the collision, an optimal return to the pre-planned route is executed. All combined methods are summarized in Table 6.7.
6.3.8 Multi-agent Methods
Wangermann et al. [78--82] used principled negotiation [83] among agents with different interests for air-traffic management by time slot negotiations. In their approach, agents generate options and assess proposals that are best-suited to their problem. So, each agent optimizes its own actions. The actions of all agents are incorporated in a declarative, procedural, and reflexive model of behavior. Principled negotiation allows agents to search options that would not be available otherwise, improving the utility function of all agents.
Rong et al. [84] described a cooperative agent-based solution based on constraint satisfaction problems. Conflicting airplanes negotiate pairwise until a mutually acceptable resolution is found. A pairwise and argument-based negotiation approach is established for the airplane to search for a multilaterally acceptable conflict resolution. The proposed algorithm can fail and no solution is provided. The ground-based air-traffic controller is always included in their system and acts as a high-level supervisor and coordinator. He has the authority to approve or override any proposal from any airplane. If negotiation fails, the centralized controller forces its own resolution.
Wollkind et al. [85, 86] defined various protocols for a fully distributed solution based on agent-to-agent negotiation. They propose the solution for two-airplane conflict using the monotonic concession protocol [87] with aircraft-to-aircraft data links. The airplane looks 20 minutes into the future for prediction of conflicts. If a new conflict is going to occur, the airplane initiates negotiation with the other airplane. Airplanes exchange alternative trajectories along with utility scores integrating preferences of the airplane. After this exchange, airplanes initiate the monotonic concession protocol to select one of the deals from the negotiation set.
Resmerita et al. [88--91] used the airspace partitioning into static cells occupied by only one airplane at a given time. The conflict resolution is carried out by finding a conflict-free path through the cells. Two trajectories of airplanes are in conflict if they occupy the same cell at the same time. These cells become the vertices of an undirected graph whose edges are paths between cells. Agent (airplane) trajectories are directed, timed graphs that overlay the airspace graph. Before an aircraft enters the system, it registers itself with a central controller that maintains a list of all airplanes and their trajectories. The controller then distributes resources as planes request them, eliminating any communication between agents.
Conflict resolution becomes necessary when an agent desires a resource that has already been allocated. First, the agent attempts to alternate the paths. If no acceptable path can be constructed, the controller will request that agents holding the resources free them by choosing alternate paths of their own. Such a cascade of resource shuffling can free necessary resources or fail, and the airplane cannot enter the system at all. Each airplane follows one of its optimal paths; if an optimal path cannot be found, it does not enter. This algorithm is computationally intense and depends on a centralized controller with full knowledge.
Approaches provided by Wangermann et al. [78], Resmerita et al. [88], and Jonker et al. [92] are related to conflict resolution but do not adopt the free flight concept which has many benefits in comparison to algorithms working with the current ATM structures. There are pairwise negotiations where in each negotiation a collision between two airplanes is resolved.
Šišlák et al. [51, 93] presents the utility-based iterative peer-to-peer algorithm for cooperative CDR. It is a domain-independent algorithm, where the maneuver implementation is domain-dependent. A utility-based avoidance mechanism provides the solution for a pair of airplanes. First, the participating airplanes generate a set with various modified flight trajectories and each variation is evaluated with the utility value. The utility function is used to include the aircraft’s intention in the proposed solutions of the conflict. Variations of their flight trajectories are generated using seven parameterized conflict resolution maneuvers: straight maneuver (no change in the flight plan), turn right, turn left, climb, descend, speed up, and slow down. The best possible conflict resolution maneuver is identified by a variation of the monotonic concession protocol [87].
Hill et al. [94--97] used an approach based on satisficing game theory [98, 99]. Satisficing game theory is the concept based on dual social utility: selectability and rejectability. Selectability characterizes the effectiveness in reaching the goal regardless of the cost and rejectability describes the amount of resources consumed. Unlike conventional game theory models maximizing self-interest metrics, they propose a satisficing extension where the airplanes take into consideration the preferences of others. Their algorithm provides heading changes only. Each airplane divides all others into subgroups with specified priorities. Based on these priorities, each airplane computes the complete selectability of higher ranked airplanes using its own incomplete knowledge. This approach is very complex.
Thus, they introduce a simplified model, where the airplanes are divided into five groups according to possible heading changes. The number of airplanes in each group is taken as a weight for the group. The final decision is made according to whether the airplane is risk averse or risk seeking. Risk-averse airplanes select the option with the lowest rejectability utility and risk-seeking airplanes select the option with the highest selectability utility. The mode of the airplane is selected according to the difference between selectability and rejectability utilities for each airplane.
Table 6.8 Multi-agent methods
In [93, 100], Šišlák et al. propose the CDR method based on the creation of groups of airplanes which together solve one or more conflicts. In the denser airspace, this method provides better utilization of the airspace. Let’s imagine a situation where two airplanes have a conflict but for them it is difficult to avoid the conflict as other airplanes are close to them. The situation can be so difficult that they have only two options, either dramatically deviate from their course or deviate only slightly but make their flight plans collide with another airplane's flight plans. However, they can create a group with the other airplanes and solve the collision together. Basically, we can say that the two colliding airplanes will ask other airplanes to make space for their evasion maneuvers. The basic idea behind the proposed multiparty algorithm is to search the state space of possible applications of sequences of evasion maneuvers in the flight plans of airplanes. The goal of the search is to solve a multi-conflict with respect to given criteria evaluating the fitness of solution. Again the algorithm utilizes the A* algorithm [54]. Categorization of listed multi-agent methods is in Table 6.8.
6.3.9 Other Methods
Erzberger et al. [101] presented the approach combining deterministic trajectory prediction and stochastic conflict analysis to achieve reliable conflict detection. The conflict probability algorithm is a three-dimensional extension of their previous algorithm [102]. They formulate error models for trajectory prediction and estimate conflict probability as a function of an encounter geometry. Then, they use motion equations to generate four-dimensional trajectories for automated conflict resolution with constraints on the conflict probability.
Viebahn et al. [103] developed the method for detecting and avoiding flight hazards that combines all potential external threats for an airplane into a single system. Their method is based on an airplane-surrounding airspace model consisting of discrete volume elements. For each element of the volume the threat probability is derived from the sensor output. The position of the own airplane is predicted by utilizing a probability distribution. Such an approach ensures that all potential positions of the airplane within the near future are considered during weighting the most likely flight path. The conflict resolution maneuver is generated taking into account all potential hazards in its surrounding.
Alliot et al. [104--106] solved multi-airplane conflicts by generating resolution maneuvers for each aircraft sequentially with a token allocation strategy. Each collision pair is solved so that there is no collision for the next 5 minutes. They used the A* algorithm to select the optimal maneuver from a set of predefined maneuvers. Problems may occur when one attempts to apply successively the pairwise resolution to multiple aircraft conflicts. The performance depends highly on the quality of the ordering. It is extremely difficult to find the optimal ordering [41, 107].
Burdun et al. [108] designed an artificial intelligence knowledge model which supports automated conflict management for the free flight operation. A group of potentially conflicting airplanes is represented as an autonomous process. This process incorporates the principles of collective behavior inspired by nature, like bird flocking, fish schooling, insect swarming, etc. These principles are used to manage potential conflicts based on kinematic and geometric constraints. Beside these principles, it integrates comprehensive knowledge of system dynamics. They combine self-organization and physics-based prediction because a flocking model alone is not sufficient to avoid collisions. Based on certain conditions they employ one of the methods.
Hu et al. [109] used the braid theory to categorize the types of multi-airplane resolutions. They classify the type of conflict resolution for airplane encounters according to their state in the joint space-time coordinates. The probabilistic resolution algorithm is integrated as a random type chooser so that the combinatorial optimization problem is solved with a randomized solution. The result of this classification assigns correspondence to that of the pure braid groups. They construct the resolution maneuvers by solving a convex optimization problem to minimize the total length of trajectories included in the cost function for a given type of maneuver.
For two airplanes, they use analytic expressions for construction of optimal resolution maneuvers. For the multiple airplane case, they use the convex optimization technique to find the optimal two-legged resolution maneuver within each categorized collision type. When increasing the number of airplanes, their solution becomes computationally complex. Due to the usage of randomized algorithms, their approach could produce different solutions to the same conflict problems.
Krozel et al. [110] described the distributed algorithm using constant speed heading changes only. They resolve the future collisions in a pairwise manner using finite time horizon. The solution of the previous conflict can cause further conflict, which is solved within the next iteration. The colliding airplane is passed in front or behind the conflicting airplane using two different strategies. The myopic strategy determines the most efficient resolution for the conflict by choosing the front-side or back-side maneuver that requires the minimum heading change. The look-ahead strategy first determines the most efficient maneuver (front- or back-side) and then checks if this maneuver would create a new conflict earlier than the current one. If no such conflict is found, it executes the selected maneuver (similar to myopic strategy). However, if such a conflict is found, it checks the opposite solution to see whether it is conflict-free. If so, it executes that solution. Otherwise, it searches for the maneuver heading in 2-degree increments starting from the original variant until it finds a conflict-free path. This results in a minimum separation distance in a given time horizon.
Mao et al. [111--115] addressed the conflict resolution problem for two perpendicular airplane flows intersecting at a fixed point. They proved that the resolution scheme based on one minimum heading change formulated as the heading change maneuver upon entering the airspace provides a stable solution for this conflict as an extension of their previous work [116]. Further work was extended to analyze the multiple intersecting flows where simple decentralized conflict avoidance rules may not handle all traffic scenarios [117]. The conflict resolution problem is decomposed into a sequence of subproblems. Each involves only two intersecting flows of airplanes. The strategy for achieving the decomposition is to laterally displace the airplane flows so that they intersect in pairs and the resulting conflict zones are non-overlapping. They define the conflict zone as a circular area that is centered at the intersection of a pair of flows. They formulate an optimization problem to minimize the lateral displacements of the airplane flows. The non-convex problem is then converted to a closed-form solution for three intersecting flows.
Bayen et al. [118] used a theoretical model of sector-based air-traffic flow which is derived using the hybrid automata theory. Their model is based on trajectory-dependent aggregate quantities such as the average number of aircrafts in a portion of airspace. Using the finite set of simple instructions for airplanes provided by the air-traffic control system, their model tries to reach thee maximum authorized number of aircraft in sectors. The system is very close to the current air-traffic control based on predefined airways where the system primarily controls the distribution of airplanes along these airways. The defined hybrid automaton used for airplane control also integrates airways changes represented by shortcut and detour actions.
Visintini et al. [119, 120] defined the conflict resolution problem as an optimization of expected value criterion. Their model includes the levels of uncertainty using a stochastic simulator [121]. The iterative procedure based on Markov chain Monte Carlo is used for the conflict resolution in a stochastic setting. Their approach is motivated by Bayesian statistics [122]. They consider an expected value resolution criterion that takes into account separation. The approach selects the most efficient maneuver which is safe with high enough probability. Such a constrained optimization problem they approximated by an optimization problem with an expected value criterion so that the optimal maneuver ensures a high probability of constraint satisfaction. The method is validated for terminal and approach sectors.
Grabbe et al. [123] set the domain in terms of a job shop scheduling problem over user-preferred routes to reduce trajectory crossing points. For the specified job shop scheduling problem, they use a 0–1 integer programming model to calculate the optimal departure and en-route control. The model is enhanced with a ration-by-schedule-based heuristic to transform the original model into a subset of problems.
Table 6.9 Other methods
Paielli [124] provided an algorithm for computing vertical resolution maneuvers [125] to resolve air-traffic conflicts within the next two minutes. He uses several procedures including rejection of altitude amendments, temporary altitudes, step altitudes, level-off confirmation.
Grabbe et al. [126, 127] proposed a sequential optimization method to manage the air-traffic flow under uncertainty in airspace capacity. They developed a decision support system by integrating a deterministic integer programming model for assigning delays to airplanes under en-route capacity constraints to reactively account for system uncertainties. They address the departure control model which assigns the pre-departure delays to individual flights based on deterministic estimates of the flight schedule, airport capacities, and airspace capacities.
Kim et al. [128] present a real-time algorithm for CDR which uses 3D point – mass aircraft models. The conflict probability is calculated by using Monte Carlo simulation. The time of the collision and the distance between the aircrafts in the given time are compared to given threshold values to determine the collision probability. For the conflict resolution, the predefined maneuvers are used. The best maneuver for resolution is selected and the acceleration command is transformed into thrust, load, and bank angle of the aircraft.
Gariel and Feron [129] presented a 3D conflict resolution algorithm in the presence of uncertainty in the case of failure in communication, navigation, or surveillance systems. The authors propose using a minimal set of maneuvers–heading change, speed change, and flight level change. The mixed integer program is used to determine the set of maneuvers to be used in conflict resolution. Uncertainties are simply modeled as an increase in the requirements for the safety zone size.
Kouzegharani in his dissertation [130] models the CDR process as a hybrid system – interaction of the continuous dynamics of the aircraft used for collision prediction together with the discrete conflict detection logic. A hybrid hidden Markov model is used to enable the prediction of the stochastic aircraft states by combining elements of the probabilistic timed input–output automaton and partially observable Markov decision process frameworks.
In the dissertation of van Daalen [131] the author introduces probabilistic collision detection using the flow of probability through the boundary of the conflict region. The actual conflict detection is computed using adaptive numerical integration. The conflict resolution method uses the kino-dynamic motion planning algorithms with probabilistic road-maps. Taxonomy of all other methods is presented in Table 6.9.
Acknowledgments
The research in this chapter has been sponsored by the Czech Ministry of Education grant number 6840770038, the Czech Ministry of Defence grant number OVCVUT2010001, and by the Air Force Office of Scientific Research, Air Force Material Command, USAF, under grant number FA8655-06-1-3073. The views and conclusions contained herein are those of the authors and should not be interpreted as representing the official policies or endorsements, either expressed or implied, of the Air Force Office of Scientific Research or the US Government.
References
1. W. H. Harman, ‘TCAS: A system for preventing midair collisions,’ Lincoln Laboratory Journal, vol. 2, no. 3, pp. 437–457, 1989.
2. FAA, Document DOT/FAA/RD-91/5, Precision Runway Monitor Demonstration Report, February 1991.
3. J. Krozel, M. Peters, and G. Hunter, Conflict detection and resolution for future air transportation management. Technical Report NASA CR-97-205944, April 1997.
4. J. Kuchar and L. Yang, ‘A review of conflict detection and resolution modeling methods,’ IEEE Transactions on Intelligent Transportation Systems, vol. 1, pp. 179–189, December 2000.
5. K. Zeghal, ‘A review of different approaches based on force fields for airborne conflict resolution,’ in Proceedings of the AIAA Guidance, Navigation, and Control Conference (Boston, MA), pp. 818–827, August 1998.
6. B. Albaker and N. Rahim, ‘A survey of collision avoidance approaches for unmanned aerial vehicles,’ in Technical Postgraduates (TECHPOS), 2009 International Conference for, 2009.
7. R. Holdsworth, Autonomous In-Flight Path Planning to replace pure Collision Avoidance for Free Flight Aircraft using Automatic Dependent Surveillance Broadcast. PhD thesis, Swinburne University, Melbourne, Australia, November 2003.
8. J. Kim, S. Sukkarieh, and S. Wishart, ‘Real-time navigation, guidance, and control of a UAV using low-cost sensors,’ in Springer Tracts in Advanced Robotics, 2006.
9. R. Schild, Rule optimization for airborne aircraft separation. PhD thesis, Technical University Vienna, Vienna, Austria, November 1992.
10. I. Hwang, J. Kim, and C. Tomlin, ‘Protocol-based conflict resolution for air traffic control,’ Air Traffic Control Quarterly, vol. 15, no. 1, pp. 1–34, 2007.
11. I. Hwang and C. Tomlin, ‘Protocol-based conflict resolution for finite information horizon,’ in Proceedings of the American Control Conference, pp. 748–753, 2002.
12. R. Lachner, ‘Collision avoidance as a differential game: Real-time approximation of optimal strategies using higher derivatives of the value function,’ in Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, vol. 3, pp. 2308–2313, October 1997.
13. R. Isaacs, Differential Games. New York: R. E. Krieger, 1965.
14. J. Zhang and S. Sastry, ‘Aircraft conflict resolution: Lie–Poisson reduction for game on SE(2),’ in Proceedings of the 40th IEEE Conference on Decision and Control, vol. 2, pp. 1663–1668, 2001.
15. A. Bayen, S. Santhanam, I. Mitchell, and C. Tomlin, ‘A differential game formulation of alert levels in ETMS data for high-altitude traffic,’ in Proceedings of the AIAA Guidance, Navigation, and Control Conference (Austin, TX), August 2003.
16. V. Duong and K. Zeghal, ‘Conflict resolution advisory for autonomous airborne separation in low-density airspace,’ in Proceedings of the 36th IEEE Conference on Decision and Control, vol. 3, pp. 2429–2434, December 1997.
17. V. Duong and E. Hoffman, ‘Conflict resolution advisory service in autonomous aircraft operations,’ in Proceedings of the 16th Digital Avionics System Conference (Irvine, CA), pp. 9.3.10–9.3.17, October 1997.
18. K. Zeghal, ‘Toward the logic of an airborne collision avoidance system which ensures coordination with multiple cooperative intruders,’ in Proceedings of the International Council of the Aeronautical Sciences, vol. 3 (Anaheim, CA), pp. 2208–2218, September 1994.
19. J. Hu, J. Lygeros, M. Prandini, and S. Sastry, ‘Aircraft conflict prediction and resolution using Brownian motion,’ in Proceedings of the 38th IEEE Conference on Decision and Control, vol. 3, pp. 2438–2443, 1999.
20. M. Eby and W. Kelly, ‘Free flight separation assurance using distributed algorithms,’ in Proceedings of the IEEE Aerospace Conference (Snowmass, CO), pp. 429–441, March 1999.
21. W. Kelly and M. Eby, ‘Advances in force field conflict resolution algorithms,’ in Proceedings of the AIAA Guidance, Navigation, and Controls Conference (Denver, CO), August 2000.
22. M. S. Eby, ‘A self-organizational approach for resolving air traffic conflicts,’ Lincoln Laboratory Journal, vol. 7, no. 2, pp. 239–254, 1994.
23. M. Prandini, J. Hu, J. Lygeros, and S. Sastry, ‘A probabilistic approach to aircraft conflict detection,’ IEEE Transactions on Intelligent Transportation Systems, vol. 1, pp. 199–220, December 2000.
24. M. Prandini, J. Lygeros, A. Nilim, and S. Sastry, ‘A probabilistic framework for aircraft conflict detection,’ in Proceedings of the AIAA Guidance, Navigation, and Control Conference (Portland, OR), August 1999.
25. M. Prandini, J. Lygeros, A. Nilim, and S. Sastry, ‘Randomized algorithms for probabilistic aircraft conflict detection,’ in Proceedings of the 38th IEEE Conference on Decision and Control, vol. 3, pp. 2444–2449, 1999.
26. J. Hu, M. Prandini, and S. Sastry, ‘Aircraft conflict prediction in the presence of a spatially correlated wind field,’ IEEE Transactions on Intelligent Transportation Systems, vol. 6, pp. 326–340, September 2005.
27. M. Prandini and J. Hu, ‘Application of reachability analysis for stochastic hybrid systems to aircraft conflict prediction,’ in Proceedings of the 47th IEEE Conference on Decision and Control, pp. 4036–4041, December 2008.
28. H. A. P. Blom and J. Lygeros, Stochastic hybrid systems: Theory and safety applications, volume 337 of Lecture Notes in Control and Informations Sciences. Berlin: Springer, 2006.
29. M. Prandini, L. Piroddi, and J. Lygeros, ‘A two-step approach to aircraft conflict resolution combining optimal deterministic design with Monte Carlo stochastic optimization,’ in Proceedings of the European Control Conference (Budapest, Hungary), August 2009.
30. T. Ota, M. Nagati, and D. Lee, ‘Aircraft collision avoidance trajectory generation,’ in Proceedings of the AIAA Guidance, Navigation, and Control Conference (Boston, MA), pp. 828–837, August 1998.
31. Y. J. Chiang, J. T. Klosowski, C. Lee, and J. S. B. Mitchell, ‘Geometric algorithms for conflict detection/resolution in air traffic management,’ in Proceedings of the IEEE Conference on Decision and Control, pp. 1835–1840, December 1997.
32. S. Fortune, Handbook of Discrete and Computational Geometry, ch. Voronoi diagrams and Delaunay triangulations, pp. 377–388. Boca Raton, FL: CRC Press LLC, 1997.
33. K. Bilimoria, ‘A geometric optimization approach to aircraft conflict resolution,’ in Proceedings of the AIAA Guidance, Navigation, and Control Conference (Denver, CO), August 2000.
34. J. Hu, M. Prandini, A. Nilim, and S. Sastry, ‘Optimal coordinated maneuvers for three dimensional aircraft conflict resolution,’ Proceedings of the AIAA Journal of Guidance, Control and Dynamics, vol. 25, pp. 888–900, 2002.
35. J. Hu, M. Prandini, A. Nilim, and S. Sastry, ‘Optimal coordinated maneuvers for three dimensional aircraft conflict resolution,’ Proceedings of the AIAA Guidance, Navigation and Control Conference, August 2001.
36. M. A. Christodoulou and S. G. Kodaxakis, ‘Automatic commercial aircraft-collision avoidance in free flight: The three-dimensional problem,’ IEEE Transactions on Intelligent Transportation Systems, vol. 7, pp. 242–249, June 2006.
37. M. A. Christodoulou and C. Kontogeorgou, ‘Collision avoidance in commercial aircraft free flight via neural networks and non-linear programming,’ International Journal of Neural Systems, vol. 18, no. 5, pp. 371–387, 2008.
38. S. Luongo, C. Carbone, F. Corraro, and U. Ciniglio, ‘An optimal 3D analytical solution for collision avoidance between aricraft,’ in Proceedings of the IEEE International Conference on Mechatronics, 2009.
39. J. Ny and G. J. Pappas, ‘Geometric programming and mechanism design for air traffic conflict resolution,’ in American Control Conference, 2010.
40. J. Park, H. Oh, and M. Tahk, ‘UAV collision avoidance based on geometric approach,’ in SICE Annual Conference, 2008.
41. N. Durand, J.-M. Alliot, and O. Chansou, ‘An optimizing conflict solver for ATC,’ Journal of Air Traffic Control, vol. 3, 1995.
42. N. Durand, J.-M. Alliot, and F. Medioni, ‘Neural nets trained by genetic algorithms for collision avoidance,’ Applied Artificial Intelligence, vol. 13, no. 3, 2000.
43. P. K. Menon, G. D. Sweriduk, and B. Sridhar, ‘Optimal strategies for free flight air traffic conflict resolution,’ AIAA Journal of Guidance, Control, and Dynamics, vol. 22, no. 2, pp. 202–211, 1997.
44. E. Frazzoli, Z. Mao, J.-H. Oh, and E. Feron, ‘Resolution of conflicts involving many aircraft via semi-definite programming,’ Journal of Guidance, Control, and Dynamics, vol. 24, pp. 79–86, February 1999.
45. A. Bicchi and L. Pallottino, ‘On optimal cooperative conflict resolution for air traffic management systems,’ IEEE Transactions on Intelligent Transportation Systems, vol. 1, pp. 221–232, December 2000.
46. E. Frazzoli, L. Pallottino, V. Scordio, and A. Bicchi, ‘Decentralized cooperative conflict resolution for multiple nonholonomic vehicles,’ in Proceedings of the AIAA Guidance, Navigation and Control Conference, August 2005.
47. L. Pallottino, V. Scordio, E. Frazzoli, and A. Bicchi, ‘Probabilistic verification of a decentralized policy for conflict resolution in multi-agent systems,’ in Proceedings of the International Conference on Robotics and Automation (Orlando, FL), pp. 2448–2453, 2006.
48. L. Pallottino, E. Feron, and A. Bicchi, ‘Conflict resolution problems for air traffic management systems solved with mixed integer programming,’ IEEE Transactions on Intelligent Transportation Systems, vol. 3, pp. 3–11, March 2002.
49. L. Pallottino, A. Bicchi, and E. Feron, ‘Mixed integer programming for aircraft conflict resolution,’ in Proceedings of the AIAA Guidance, Navigation, Control Conference (Montreal, Canada), August 2001.
50. A. Raghunathan, V. Gopal, D. Subramanian, L. Biegler, and T. Samad, ‘Dynamic optimization strategies for three-dimensional conflict resolution of multiple aircraft,’ AIAA Journal of Guidance, Control, and Dynamics, vol. 27, no. 4, pp. 586–594, 2004.
51. D. Šišlák, P. Volf, A. Komenda, J. Samek, and M. P![]() chou
chou![]() ek, ‘Agent-based multi-layer collision avoidance to Unmanned Aerial Vehicles,’ in Proceedings of International Conference on Integration of Knowledge Intensive Multi-Agent Systems (KIMAS) (Piscataway, NJ), pp. 365–370, IEEE, 2007.
ek, ‘Agent-based multi-layer collision avoidance to Unmanned Aerial Vehicles,’ in Proceedings of International Conference on Integration of Knowledge Intensive Multi-Agent Systems (KIMAS) (Piscataway, NJ), pp. 365–370, IEEE, 2007.
52. C. Tomlin, G. J. Pappas, and S. Sastry, ‘Conflict resolution for air traffic management: A study in multi-agent hybrid systems,’ IEEE Transactions on Automatic Control, vol. 43, pp. 509–521, 1998.
53. S.-C. Han and H. Bang, ‘Proportional navigation-based optimal collision avoidance for UAVs,’ in Second International Conference on Autonomous Robots and Agents (S. C. Mukhopadhyay and G. S. Gupta, eds), pp. 76–81, Massey University, New Zealand, 2004.
54. P. Hart, N. Nilsson, and B. Raphael, ‘A formal basis for the heuristic determination of minimum cost paths,’ IEEE Transactions on Systems Science and Cybernetics, no. 2, pp. 100–107, 1968.
55. S. Frisken and R. Perry, ‘Simple and efficient traversal methods for quadtrees and octrees,’ 2002.
56. D. Sislak, P. Volf, M. Pechoucek, and N. Suri, ‘Automated conflict resolution utilizing probability collectives optimizer,’ IEEE Transactions on Systems, Man, and Cybernetics – Part C: Applications and Reviews, vol. 41, pp. 365–375, May 2011.
57. D. Šišlák, P. Volf, M. P![]() chou
chou![]() ek, N. Suri, D. Nicholson, and D. Woodhouse, ‘Optimization based collision avoidance for cooperating airplanes,’ in Proceedings of the IEEE/WIC/ACM International Conference on Intelligent Agent Technology (IAT) (Los Alamitos, CA), IEEE Computer Society, 2009.
ek, N. Suri, D. Nicholson, and D. Woodhouse, ‘Optimization based collision avoidance for cooperating airplanes,’ in Proceedings of the IEEE/WIC/ACM International Conference on Intelligent Agent Technology (IAT) (Los Alamitos, CA), IEEE Computer Society, 2009.
58. C. F. Lee and D. H. Wolpert, ‘Product distribution theory for control of multi-agent systems,’ in AAMAS ’04: Proceedings of the Third International Joint Conference on Autonomous Agents and Multiagent Systems (Washington, DC), pp. 522–529, IEEE Computer Society, 2004.
59. D. H. Wolpert, ‘Information theory – the bridge connecting bounded rational game theory and statistical physics,’ in Complex Engineered Systems (D. Braha, A. A. Minai, and Y. Bar-Yam, eds), (Berlin), pp. 262–290, Springer, 2006.
60. K. M. Ford, N. Suri, K. Kosnar, P. Jisl, P. Benda, M. Pechoucek, and L. Preucil, ‘A game-based approach to comparing different coordination mechanisms,’ in Proceedings of the IEEE International Conference on Distributed Human-Machine Systems (DHMS), IEEE, 2008.
61. G. J. Pappas, C. Tomlin, and S. Sastry, ‘Conflict resolution in multi-agent hybrid systems,’ in Proceedings of the IEEE Conference on Decision and Control, vol. 2, pp. 1184–1189, December 1996.
62. C. Tomlin, G. Pappas, J. Lygeros, D. Godbole, and S. Sastry, ‘Hybrid control models of next generation air traffic management,’ in Hybrid Systems IV, Lecture Notes in Computer Science, pp. 378–404, Springer-Verlag, 1997.
63. J. Lygeros, D. N. Godbole, and S. Sastry, ‘A game theoretic approach to hybrid system design,’ in Lecture Notes in Computer Science 1066, pp. 1–12, Springer-Verlag, 1995.
64. C. Tomlin, G. J. Pappas, and S. Sastry, ‘Noncooperative conflict resolution,’ in Proceedings of the IEEE Conference on Decision and Control (San Diego, CA), pp. 1816–1821, December 1997.
65. C. Tomlin, Y. Ma, and S. Sastry, ‘Free flight in 2000: Games on Lie groups,’ in Proceedings of the 37th IEEE Conference on Decision and Control, vol. 2, pp. 2234–2239, December 1998.
66. C. Tomlin, I. Mitchell, and R. Ghosh, ‘Safety verification of conflict resolution manoeuvres,’ IEEE Transactions on Intelligent Transportation Systems, vol. 2, pp. 110–120, June 2001.
67. C. Tomlin, G. Pappas, J. Košecká, J. Lygeros, and S. Sastry, ‘Advanced air traffic automation: A case study in distributed decentralized control,’ in Control Problems in Robotics and Automation, pp. 261–295, Springer-Verlag, 1998.
68. J. Košecká, C. Tomlin, G. Pappas, and S. Sastry, ‘Generation of conflict resolution manoeuvres for air traffic management,’ in Proceedings of the Intelligent Robots and Systems Conference, vol. 3, pp. 1598–1603, September 1997.
69. J. Košecká, C. Tomlin, G. Pappas, and S. Sastry, ‘2-1/2 D conflict resolution maneuvers for ATMS,’ in Proceedings of the 37th IEEE Conference on Decision and Control (Tampa, FL), pp. 2650–2655, 1998.
70. J. Krozel, T. Mueller, and G. Hunter, ‘Free flight conflict detection and resolution analysis,’ in Proceedings of the AIAA Guidance and Control Conference (San Diego, CA), July 1996.
71. A. Bryson and Y. Ho, Applied Optimal Control. New York: Hemisphere, 1975.
72. J. Krozel and M. Peters, ‘Conflict detection and resolution for free flight,’ Air Trafic Control Quarterly Journal, 1997.
73. J. Krozel and M. Peters, ‘Strategic conflict detection and resolution for free flight,’ in Proceedings of the IEEE Conference on Decision and Control (San Diego, CA), pp. 1822–1828, December 1997.
74. J. Gross, R. Rajvanshi, and K. Subbarao, ‘Aircraft conflict detection and resolution using mixed geometric and collision cone approaches,’ in Proceedings of the AIAA Guidance, Navigation, and Control Conference (Rhode Island), 2004.
75. A. Chakravarthy and D. Ghose, ‘Obstacle avoidance in a dynamic environment: A collision cone approach,’ IEEE Transactions on Systems, Man and Cybernetics, Part A: Systems and Humans, vol. 28, pp. 562–574, September 1998.
76. M. P![]() chou
chou![]() ek, D. Šišlák, D. Pavlí
ek, D. Šišlák, D. Pavlí![]() ek, and M. Uller, ‘Autonomous agents for air-traffic deconfliction,’ in Proceedings of the 5th International Joint Conference on Autonomous Agents and Multiagent Systems (AAMAS) (New York), pp. 1498–1505, ACM, 2006.
ek, and M. Uller, ‘Autonomous agents for air-traffic deconfliction,’ in Proceedings of the 5th International Joint Conference on Autonomous Agents and Multiagent Systems (AAMAS) (New York), pp. 1498–1505, ACM, 2006.
77. P. Angelov, C. D. Bocaniala, C. Xydeas, C. Pattchett, D. Ansell, M. Everett, and G. Leng, ‘A passive approach to autonomous collision detection and avoidance in uninhabited aerial systems,’ in Tenth International Conference on Computer Modeling and Simulation, 2008. UKSIM 2008, 2008.
78. J. P. Wangermann and R. F. Stengel, ‘Optimization and coordination of multiagent systems using principled negotiation,’ Journal of Guidance, Control, and Dynamics, vol. 22, no. 1, pp. 43–50, 1999.
79. J. P. Wangermann and R. F. Stengel, ‘Principled negotiation between intelligent agents: A model for air traffic management,’ Artificial Intelligence in Engineering, vol. 12, no. 3, pp. 177–187, 1998.
80. J. P. Wangermann and R. F. Stengel, ‘Optimization and coordination of multi-agent systems using principled negotiation,’ in Proceedings of the AIAA Guidance, Navigation, and Control Conference (San Diego, CA), pp. 43–50, July 1996.
81. J. P. Wangermann and R. F. Stengel, ‘Principled negotiation between intelligent agents: A model for air traffic management,’ in Proceedings of the ICAS, vol. 3 (Anaheim, CA), pp. 2197–2207, September 1994.
82. K. Harper, S. Mulgund, S. Guarino, A. Mehta, and G. Zacharias, ‘Air traffic controller agent model for free flight,’ in Proceedings of the AIAA Guidance, Navigation, and Control Conference (Portland, OR), pp. 288–301, August 1999.
83. R. Fisher and W. Ury, Negotiating Agreement Without Giving In. New York: Penguin, 1981.
84. J. Rong, S. Geng, J. Valasek, and T. R. Ioerger, ‘Air traffic control negotiation and resolution using an onboard multi-agent system,’ in Proceedings of the Digital Avionics Systems Conference, vol. 2, pp. 7B2–1–7B2–12, 2002.
85. S. Wollkind, J. Valasek, and T. R. Ioerger, ‘Automated conflict resolution for air traffic management using cooperative multiagent negotiation,’ in Proceedings of the American Institute of Aeronautics and Astronautics Conference on Guidance, Navigation, and Control (Providence, RI), 2004.
86. S. Shandy and J. Valasek, ‘Intelligent agent for aircraft collision avoidance,’ in Proceedings of the AIAA Guidance, Navigation, and Control Conference (Montreal, Canada), August 2001.
87. G. Zlotkin and J. S. Rosenschein, ‘Negotiation and task sharing among autonomous agents in cooperative domains,’ in Proceedings of the 11th International Joint Conference on Artificial Intelligence (San Mateo, CA), pp. 912–917, Morgan Kaufmann, 1989.
88. S. Resmerita, M. Heymann, and G. Meyer, ‘Towards a flexible air traffic management: Dealing with conflicts,’ in Proceedings of the 11th World Conference on Tranport Research (UC Berkeley), June 2007.
89. S. Resmerita and M. Heymann, ‘Conflict resolution in multi-agent systems,’ in Proceedings of the IEEE Conference on Decision and Control, vol. 2, pp. 2537–2545, 2003.
90. S. Resmerita, M. Heymann, and G. Meyer, ‘A framework for conflict resolution in air traffic management,’ in Proceedings of the 42nd IEEE Conference on Decision and Control, vol. 2, pp. 2035–2040, December 2003.
91. S. Resmerita, A multi-agent approach to control of multi-robotic systems. PhD thesis, Department of Computer Science, Technion - Israel Instite of Technology, Israel, 2003.
92. F. Jonker and J. Meyer, ‘Achieving cooperation among selfish agents in the air traffic management domain using signed money,’ in Proceedings of the Sixth International Joint Conference on Autonomous Agents and Multi-Agent Systems, May 2007.
93. D. Šišlák, P. Volf, and M. P![]() chou
chou![]() ek, ‘Agent-based cooperative decentralized airplane collision avoidance,’ IEEE Transactions on Intelligent Transportation Systems, vol. 12, pp. 36–46, March 2011.
ek, ‘Agent-based cooperative decentralized airplane collision avoidance,’ IEEE Transactions on Intelligent Transportation Systems, vol. 12, pp. 36–46, March 2011.
94. J. K. Archibald, J. C. Hill, N. A. Jepsen, W. C. Stirling, and R. L. Frost, ‘A satisficing approach to aircraft conflict resolution,’ IEEE Transactions on Systems, Man, and Cybernetics, Part C: Applications and Reviews, vol. 38, no. 4, pp. 510–521, 2008.
95. J. C. Hill, F. R. Johnson, J. K. Archibald, R. L. Frost, and W. C. Stirling, ‘A cooperative multi-agent approach to free flight,’ in Proceedings of the 4th International Joint Conference on Autonomous agents and Multiagent systems (AAMAS) (New York), pp. 1083–1090, ACM Press, 2005.
96. F. R. Johnson, J. C. Hill, J. K. Archibald, R. L. Frost, and W. C. Stirling, ‘A satisficing approach to free flight,’ in Proceedings of the IEEE Networking, Sensing and Control, pp. 123–128, March 2005.
97. J. C. Hill, J. K. Archibald, W. C. Stirling, and R. L. Frost, ‘A multi-agent architecture for air traffic control,’ in Proceedings of the 2005 AIAA Guidance, Navigation, and Control Conference (San Francisco, CA), 2005.
98. J. K. Archibald, J. C. Hill, F. R. Johnson, and W. C. Stirling, ‘Satisficing negotiations,’ IEEE Transactions on Systems, Man and Cybernetics, Part C: Applications and Reviews, vol. 36, no. 1, pp. 4–18, 2006.
99. W. C. Stirling, Satisficing Games and Decision Making: With Applications to Engineering and Computer Science. Cambridge: Cambridge University Press, 2003.
100. D. Šišlák, J. Samek, and M. P![]() chou
chou![]() ek, ‘Decentralized algorithms for collision avoidance in airspace,’ in Proceedings of the 7th International Converence on Autonomous Agents and Multi-Agent Systems (AAMAS) (New York), pp. 543–550, ACM Press, 2008.
ek, ‘Decentralized algorithms for collision avoidance in airspace,’ in Proceedings of the 7th International Converence on Autonomous Agents and Multi-Agent Systems (AAMAS) (New York), pp. 543–550, ACM Press, 2008.
101. H. Erzberger, R. A. Paielli, D. R. Isaacson, and M. M. Eshow, ‘Conflict detection and resolution in the presence of prediction error,’ in Proceedings of the 1st USA/Euroupe Air Traffic Management Research Development Seminar (Saclay, France), June 1997.
102. R. A. Paielli and H. Erzberger, ‘Conflict probability estimation for free flight,’ AIAA Journal of Guidance, Control, and Dynamics, vol. 20, pp. 588–596, 1997.
103. H. von Viebahn and J. Schiefele, ‘A method for detecting and avoiding flight hazards,’ in Proceedings of the SPIE Meeting on Enhanced Synthetic Vision (Bellingham, WA), pp. 50–56, April 1997.
104. J.-M. Alliot, N. Durand, and G. Granger, ‘FACES: a Free flight Autonomous and Coordinated Embarked Solver,’ in Proceedings of the 2nd USA/EUROPE Air Traffic Management R&D Seminar, December 1998.
105. N. Durand and J.-M. Alliot, ‘Optimal resolution of en route conflicts,’ in Proceedings of the Seminaire Europe/USA (Saclay, France), 1997.
106. G. Granger, N. Durand, and J.-M. Alliot, ‘Optimal resolution of en route conflicts,’ in Proceedings of Air Traffic Management, 2001.
107. G. Granger, N. Durand, and J.-M. Alliot, ‘Token allocation strategy for free-flight conflict solving,’ in Proceedings of the Thirteenth Conference on Innovative Applications of Artificial Intelligence Conference, pp. 59–64, AAAI Press, 2001.
108. I. Burdun and O. Parfentyev, ‘AI knowledge model for self-organizing conflict prevention/ resolution in close free-flight air space,’ in Proceedings of the Aerospace Conference, vol. 2, pp. 409–428, 1999.
109. J. Hu, M. Prandini, and S. Sastry, ‘Optimal maneuver for multiple aircraft conflict resolution: A braid point of view,’ in Proceedings of the 39th IEEE Conference on Decision and Control, vol. 4, pp. 4164–4169, 2000.
110. J. Krozel, M. Peters, K. D. Bilimoria, C. Lee, and J. S. Mitchel, ‘System performance characteristics of centralized and decentralized air traffic separation strategies,’ in Proceedings of the 4th USA/Europe Air Traffic Management R&D Seminar (Stanta Fe, NM), December 2001.
111. Z. H. Mao, D. Dugail, E. Feron, and K. Bilimoria, ‘Stability of intersecting aircraft flows using heading-change maneuvers for conflict avoidance,’ IEEE Transactions on Intelligent Transportation Systems, vol. 6, pp. 357–369, December 2005.
112. D. Dugail, E. Feron, and K. Bilimoria, ‘Stability of intersecting aircraft flows using heading change maneuvers for conflict avoidance,’ in Proceedings of the American Control Conference, pp. 760–766, 2002.
113. D. Dugail, Z. Mao, and E. Feron, ‘Stability of intersecting aircraft flows under centralized and decentralized conflict avoidance rules,’ in Proceedings of the AIAA Guidance, Navigation, and Control Conference, August 2001.
114. Z. Mao and E. Feron, ‘Stability and performance of intersecting aircraft flows under sequential conflict resolution,’ in Proceedings of the 2001 American Control Conference, pp. 722–729, June 2001.
115. Z. Mao and E. Feron, ‘Stability of intersecting aircraft flows under decentralized conflict avoidance rules,’ in Proceedings of the AIAA Guidance, Navigation and Control Conference, August 2000.
116. Z. Mao, E. Feron, and K. Bilimoria, ‘Stability and performance of intersecting aircraft flows under decentralized conflict avoidance rules,’ IEEE Transactions on Intelligent Transportation Systems, vol. 2, pp. 101–109, June 2001.
117. K. Treleaven and Z.-H. Mao, ‘Conflict resolution and traffic complexity of multiple intersecting flows of aircraft,’ IEEE Transactions on Intelligent Transportation Systems, vol. 9, pp. 633–643, December 2008.
118. A. Bayen, P. Grieder, G. Meyer, and C. Tomlin, ‘Lagrangian delay predictive model for sector based air traffic flow,’ in AIAA Journal of Guidance, Control, and Dynamics, vol. 28, pp. 1015–1026, 2005.
119. A. L. Visintini, W. Glover, J. Lygeros, and J. Maciejowski, ‘Monte Carlo optimization for conflict resolution in air traffic control,’ IEEE Transactions on Intelligent Transportation Systems, vol. 7, pp. 470–482, December 2006.
120. A. Lecchini, W. Glover, J. Lygeros, and J. M. Maciejowski, ‘Air-traffic control in approach sectors: Simulation examples and optimisation,’ in Proceedings of the 8th International Workshop on Hybrid Systems: Computation and Control (Zurich, Switzerland), pp. 433–448, March 2005.
121. W. Glover and J. Lygeros, ‘A stochastic hybrid model for air traffic control simulation,’ in Proceedings of the 7th International Workshop on Hybrid Systems: Computation and Control (Philadelphia, PA), pp. 372–386, March 2004.
122. P. Muller, ‘Simulation based optimal design,’ Bayesian Statistics, vol. 6, 1998.
123. S. Grabbe and B. Sridhar, ‘Central East Pacific flight scheduling,’ in Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, August 2007.
124. R. A. Paielli, ‘Tactical conflict resolution using vertical maneuvers in enroute airspace,’ AIAA Journal of Aircraft, vol. 45, no. 6, 2008.
125. R. A. Paielli, ‘Modeling maneuver dynamics in air traffic conflict resolution,’ Journal of Guidance, Control, and Dynamics, vol. 26, no. 3, pp. 407–415, 2003.
126. S. Grabbe, B. Sridhar, and A. Mujkerjee, ‘Sequential traffic flow optimization with tactical flight control heuristics,’ in Proceedings of the AIAA Guidance, Navigation, Control Conference (Honolulu, HI), August 2008.
127. S. Grabbe, B. Sridhar, and A. Mujkerjee, ‘Integrated traffic flow decision making,’ in Proceedings of the AIAA Guidance, Navigation, and Control Conference (Chicago, IL), August 2009.
128. K. Kim, J. Park, and M. Tahk, ‘A probabilistic algorithm for multi-aircraft collision detection and resolution in 3-d,’ in KSAS International Journal, 2008.
129. M. Gariel and E. Feron, ‘3d conflict avoidance under uncertainties,’ in Digital Avionics System Conference, 2009.
130. A. N. Kouzehgarani, Mode Identification Using Stochastic Hybrid Models with Applications to Conflict Detection and Resolution. PhD thesis, University of Illinois at Urbana-Champaign, 2010.
131. C. E. van Daalen, Conflict Detection and Resolution for Autonomous Vehicles. PhD thesis, Stellenbosch University, 2010.