
Introduction
In the study of electrical machines the fundamentals of electromagnetism and single- and three-phase circuits play the most important role. The main aim of this introductory chapter is to introduce the basics, which are the cornerstones of electrical machines.
ELECTROMAGNETISM
When an electric current passes through a conductor, a magnetic field immediately builds up due to the motion of electrons. When a magnetic field encompasses a conductor and moves relative to the conductor, the electrons come in motion. This is the converse of the previous phenomenon. Electromagnetism is the study of electromagnetic force (emf) induced in the conductor when it cuts the magnetic flux or is cut by the magnetic flux.
DIRECTION OF CURRENT IN A CONDUCTOR
Figure 1(a) shows that there is no current through the conductor. Figure 1(b) shows that the conductor carries current away from the observer, that is, in a downward direction, while Figure 1(c) indicates that the conductor carries current towards the observer, that is, in an upward direction.
DIRECTION OF MAGNETIC FLUX IN A CONDUCTOR
The direction of magnetic flux can be easily found out by using either the right-hand rule or the corkscrew rule.
- Right-hand rule: If the conductor is graphed by the right hand in such a way that the thumb points in the direction of the current, then the closed fingers give the direction of flux, as shown in Figure 2.
- Corkscrew rule: Imagine a corkscrew is pointed in the direction of a current. The direction of magnetic field is in the direction in which the screw is to be turned to move it in a forward direction. The application of the corkscrew rule is shown in Figure 3.
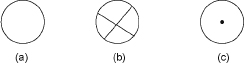
Figure 1 Direction of Current in a Conductor
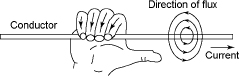
Figure 2 Right-hand Rule

Figure 3 Corkscrew Rule
FLUX DISTRIBUTION OF AN ISOLATED CURRENT-CARRYING CONDUCTOR
The distribution of flux when a conductor carries current downwards, that is, away from the observer, is shown in Figure 4(a). The flux distribution when a conductor carries current upwards, that is, towards the observer, is shown in Figure 4(b).
FORCE BETWEEN TWO CURRENT-CARRYING CONDUCTORS
Figures 5(a) and 5(b) show the two conductors A and B, carrying current in the same and the opposite directions, respectively. The flux distribution when they carry current in the same direction is shown in Figure 5(a). The magnetic fields set up by the two conductors are in opposite directions. Hence, they attract each other. The flux distribution when they carry current in opposite directions is shown in Figure 5(b). The magnetic fields set up by the two conductors are in the same direction. Hence, they repel each other.
FORCE ON A CONDUCTOR IN A MAGNETIC FIELD
The force experienced by a current-carrying conductor placed in a magnetic field, shown in Figure 6, is expressed as
F = BIL
where F is the force on the conductor (N), B is the magnetic flux density (Wb/m2), I is the current in the conductor (A) and L is the effective length of the conductor to the field (m).
If F = 1N, I = 1A and L = 1 m, B = 1 T.
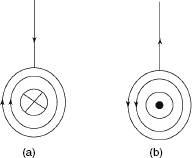
Figure 4 Isolated Current carrying Conductors
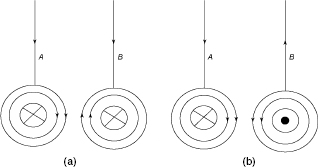
Figure 5 Two Current-carrying Conductors
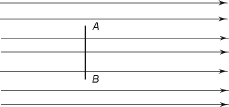
Figure 6 Conductor at an Angle of 90° to a Magnetic Field
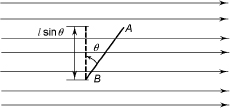
Figure 7 Conductor at an Angle θ to a Magnetic Field
If the conductor is placed at an angle θ to the field, as shown in Figure 7, the effective length will be L sin θ and the force on the conductor will be F = BIL sin θ.
The effective length is the length of the conductor lying within the magnetic field.
If θ = 0, that is, the conductor is placed parallel to the field, F = 0.
The basic principle of an electric motor is that the armature conductor carrying the current is placed in a magnetic field. So, it is also called the motor principle. The direction of rotation of the armature is defined by Fleming’s left-hand rule, as shown in Figure 8.
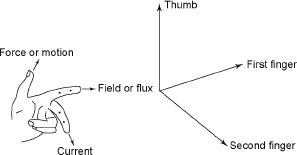
Figure 8 Fleming’s Left-hand Rule
Spread the thumb, forefinger and second finger of the left hand so that they are mutually perpendicular to each other. If the forefinger indicates the direction of flux and the second finger indicates the direction of current, the thumb will indicate the direction of rotation of the armature. Please see Appendix A for basic terminologies and losses.
GENERATION OF INDUCED EMF AND CURRENT
Figure 9 shows an insulated coil whose terminals are connected to a sensitive galvanometer (G). There is a bar magnet, AB, close to the coil. When the bar magnet is suddenly moved towards the coil to position A ‘B’, there is a deflection in the galvanometer. This deflection in the galvanometer lasts so long as there are relative motions of the magnet with respect to the coil; that is, the flux linking with the coil changes.
Figure 10 shows that when the magnet is withdrawn, the deflection of the galvanometer is in the direction opposite to the above case. This deflection exists so long as the bar magnet is in relative motion to the coil; that is, the flux linking with the coil changes.

Figure 9 Generation of Induced emf
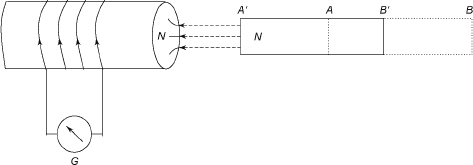
Figure 10 Magnet Withdrawn
In both the cases, the deflection is reduced to zero when the bar magnet becomes stationary. The flux linked with the coil increases as the bar magnet approaches the coil in the first case, while in the second case, the flux linked with the coil decreases when the bar magnet is withdrawn.
It is clear from above that deflections in the two cases are in different directions. The deflection in the galvanometer indicates that there is an induced current produced in the coil. In the first case, the induced current flows through the coil in an anticlockwise direction as seen from the bar magnet. This indicates that the face of the coil is the N pole. To move the bar magnet towards the coil, a force from outside must be given to the bar magnet. When the magnet is withdrawn, the current flows in a clockwise direction, as seen from the bar magnet. This indicates that the face of the coil is the S pole. So once again force must be supplied to the bar magnet from outside to take it away from the coil. Here, the principle of conservation of energy is fully satisfied.
From the above results, Faraday proposed two laws known as Faraday’s first and second laws.
FARADAY’S LAWS
- First law: Whenever there is variation of magnetic flux linked with a coil, an emf is induced in it. Or an emf is induced in a conductor whenever it cuts the magnetic flux.
- Second law: The magnitude of this induced emf is the rate of change of flux linkage.
Let the initial flux be Φ1 and the final flux be Φ2 in time t. Let the turns of the coil be N. Therefore, the initial flux linkage is NΦ1 and the final flux linkage is NΦ2.
In differential form, we can put Equation (1) as ![]()
LENZ’S LAW
The law states that the induced current will flow in such a direction that it will oppose the cause that produces it. It is explained as follows:
The current through the coil 1 is varied by the rheostat, as shown in Figure 11. An emf is induced in coil 2 due to variation of flux in coil 1. The induced emf between P and Q will be such that the current will flow from P to Q via the resistance R so that it will oppose the flux that is linked with it. In this case P will have a positive polarity and Q will have a negative polarity. The induced emf is given by ![]() .
.

Figure 11 Example of Lenz’s Law
INDUCED EMF
An emf is induced in the conductor either (i) dynamically or (ii) statically. In the first case, the conductor will move in the magnetic field and the flux will be non-varying. In the second case, the conductor will be stationary and the flux will be varying.
Dynamically Induced emf
In Figure 12(a), conductor A is shown by the cross-section within the uniform magnetic field. It moves at the right angle to the magnetic field of flux density B Wb/m2. If the conductor moves a length dx in time dt, the area swept by it is equal to Idx, where l is the length of the conductor lying within the magnetic field. Here, change in flux is equal to Bldx in time dt. According to Faraday’s law, the induced emf (also known as dynamically induced emf) is expressed as
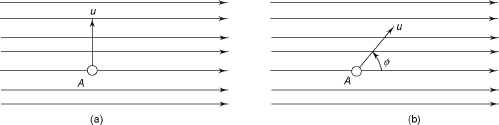
Figure 12 Dynamically Induced emf
where ![]() = the velocity of the conductor if the conductor moves at an angle Φ with the magnetic field shown in Figure 12(b). The component of its velocity in the direction perpendicular to the field is u sin Φ. The induced emf (e) becomes
= the velocity of the conductor if the conductor moves at an angle Φ with the magnetic field shown in Figure 12(b). The component of its velocity in the direction perpendicular to the field is u sin Φ. The induced emf (e) becomes
If the conductor moves parallel to the field, the value of Φ will be 0°. The induced emf becomes zero; i.e., e = 0.
The direction of the induced emf can be found out by Fleming’s right-hand rule as shown in Figure 13. This rule states that if anyone spreads the thumb, forefinger and second finger of the right hand so that they are mutually perpendicular to each other, the thumb indicates the direction of rotation of the conductor in the magnetic field, the forefinger shows the direction of the magnetic field and the second finger indicates the direction of the flow of the induced current in the conductor.

Figure 13 Fleming’s Right-hand Rule
DC generators work on the principle of production of dynamically induced emf in the conductors, which are housed in a revolving armature lying within the magnetic field.
Statically Induced emf
If the flux in coil A varies by varying current with the help of the rheostat, the flux linked with coil B also changes and emf is induced in coil B, and its direction will be obtained by Lenz’s law.
Coil A is connected to a battery (E) via a rheostat (Rh) as shown in Figure 14. Coil B is connected to a voltmeter (V). When the current in coil A is established, the flux will be produced in coil A, and it varies by varying the current in the coil with the help of the rheostat. This varying flux links with coil B and emf is induced in the coil. This emf is also called mutually induced emf. In this case there is no movement of coil B. Similarly, if the connection is reversed, that is, a voltmeter is connected to coil A and the battery and the rheostat to coil B, the emf will be produced in coil A.
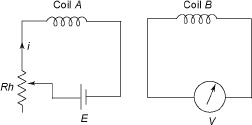
Figure 14 Statically Induced emf in Coil B due to Variation of Flux in Coil A
Another type of statically induced emf in a coil is the self-induced emf in a coil, which is produced due to the changes of flux in the coil itself by changing the current through it. In Figure 15, the current through the coil is changed by the rheostat (Rh). The flux linked with the coil also changes producing self-induced emf in the coil. The direction of the induced emf in the coil is obtained by Lenz’s law that opposes any change of flux in it. This emf is also known as opposing emf or counter emf.
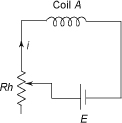
Figure 15 Statically Induced emf in a Single Coil
MAGNETIC CIRCUITS
Magnetic flux lines form closed loops. A magnetic circuit is defined as the closed path followed by flux lines. An electric circuit provides a path for electric current, whereas a magnetic circuit provides a path for magnetic flux. The knowledge of magnetic circuits is of utmost importance in the design, analysis and applications of electromagnetic devices such as transformers, rotating electrical machines and electromagnetic relays. The basics of magnetic circuits are introduced in the following sections.
MAGNETOMOTIVE FORCE
A current-carrying conductor produces a magnetic field around it. The coil should have the correct number of turns in order to produce the required flux density. Magnetomotive force (mmf) is defined as the product of current and number of turns.
Magnetomotive force = Current × Turns
Let I be the current through the coil (A) and N be the number of turns in the coil.
The unit of mmf is ampere-turns (AT). Since N is dimensionless, its unit is ampere (A) also.
MAGNETIC FIELD INTENSITY
Magnetomotive force per unit length of magnetic flux path is called magnetic field intensity (H).
where l is the mean length of the magnetic circuit in metres. Magnetic field intensity is also called magnetic field strength or magnetizing force.
From Equation (5),
MAGNETIC FLUX
A current-carrying conductor produces a magnetic field around it. The magnetic field is measured in terms of flux lines (or simply flux) Φ and flux density B, the number of flux lines per unit area.
The density of flux is greatest near the conductor and tapers off inversely with distance.
The unit of flux Φ is webers (Wb) and the unit of magnetic intensity (B) is webers per metre square (Wb/ m2) or tesla (T).
1 weber = 108
1 gauss = 1 Wb/cm2 = 10-4 Wb/m2
1 tesla = 104 gausses
These units are in rationalized MKS system.
By Ampere’s law, the line integral of the field intensity ![]() around a closed path is equal to the current enclosed by that path.
around a closed path is equal to the current enclosed by that path.
The line integral of the closed path dl is the circumference of the circle 2πr.
From Equation (8),
From Equation (9) and (10),
![]()
i.e.,
For medium other than free space,
μ = μ0μr
where μr is the relative permeability.
Flux is produced by current
Φ∝I.
If there are N turns instead of single conductor,
where NI, called ampere-turns (AT), is the flux-producing ability of the current-carrying circuit.
We can visualize NI or AT as the force that produces flux and hence is called the magnetomotive force, mmf (F).
Thus, we have arrived at a magnetic circuit similar to an electric circuit.
The medium surrounding the conductor causes resistance to the creation of flux. In the magnetic circuit, this resistance is called reluctance (S).
where S is the reluctance.
As in the case of an electric circuit, reluctance is directly proportional to length, l and inversely to area, A, and the property of the material called permeability, μ.
![]()
So, higher the permeability, lesser the reluctance and greater the flux.
We have seen that permeability of free space is very low, 4π × 10-7 H/m. Ferromagnetic materials, that is, alloys of iron with cobalt, tungsten, nickel and aluminum, have very high permeability (μr), ranging from 2,000 to 80,000. High-permeability materials have the property of confining the flux within their cross-sectional area instead of spreading out as in space.
SINGLE-PHASE CIRCUITS
In AC circuits, voltage and current vary sinusoidally. The passive parameters of AC circuits are resistance (R), inductance (L) and capacitance (C).
Series R-L Circuit
Figure 16(a) shows an R-L series circuit.
Let
The current lags behind the voltage by an angle ![]() shown in Figure 16(b).
shown in Figure 16(b).
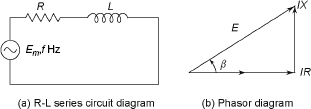
Figure 16 R-L Series Circuit
Here, ![]()
where X = ωL
Series R-C Circuit
Figure 17(a) shows an R-C series circuit.
Let
where Im is the maximum value of current.
Where
where Z is called the impedance of the circuit.
The phasor diagram is shown in Figure 17(b). From Figure 17(b), the power factor of the circuit is given by ![]() .
.
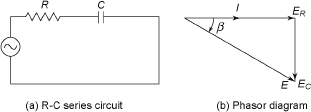
Figure 17 R-C Series Circuit and Its Phasor Diagram
Series L-C-R Circuit
Figure 18 shows a series R–L–C circuit.
Let

where

From Equation (25), the following conclusions can be drawn:
- If
 β is positive. In this case the voltage leads the current by an angle β. The phasor diagram is shown in Figure 19(a).
β is positive. In this case the voltage leads the current by an angle β. The phasor diagram is shown in Figure 19(a). - If
 β is negative. In this case the current leads the voltage by an angle β. The phasor diagram is shown in Figure 19(b).
β is negative. In this case the current leads the voltage by an angle β. The phasor diagram is shown in Figure 19(b). - If
 In this case the voltage and the current are in phase. The phasor diagram is shown in Figure 19(c).
In this case the voltage and the current are in phase. The phasor diagram is shown in Figure 19(c).
When β = 0, Z = R. The impedance is purely resistive and minimum. Whereas the current is maximum. This is the condition of resonance for a series resonance circuit.
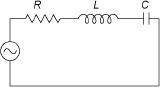
Figure 18 Schematic Diagram of Series R-L-C Circuit
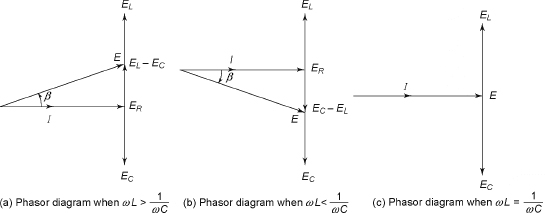
Figure 20 Phasor Diagrams of Series R-L-C Circuit for Three Different Cases
POWER TRIANGLE
The geometrical representation of apparent power, average power (true power or real power) and reactive power is called the power triangle. Figures 20(a) and 20(b) show power triangles for an inductive load and a capacitive load, respectively.
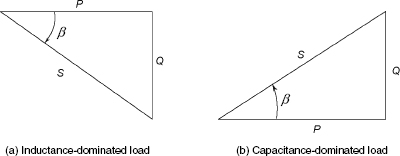
Figure 20 Power Triangles
COMPLEX POWER
S, P and Q of a power triangle can be obtained from the product VI. It is called complex power (S).
For a capacitive load, let
V = Vrejθ and I = Ire+j(θ+β)
i.e., S = VI* = Vrejθ · Ire-j(θ+β) = VrIre-jβ = VrIr (cosβ – jsinβ)
= VrIr cosβ – j VrIr sinβ
i.e., S = P – jQ
Similarly, for an inductive load, let V = Vrejθ and I = Irej(θ-β)
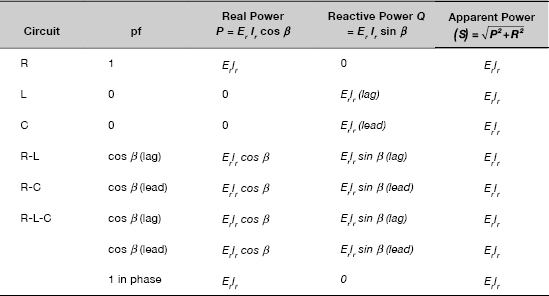
By convention, +Q indicates lagging reactive power while -Q indicates leading reactive power. The inductive load absorbs lagging reactive power and capacitive load supplies lagging reactive power. Table 1 shows the P, Q and S for different types of circuits.
Table 1 P, Q and S for Different Types of Circuits
THREE-PHASE CIRCUITS
The generation of electrical power takes place in three phases in practice; these three phases are represented by a, b and c in Figure 21. The field rotates with synchronous speed. The three phases a, b and c are the armature conductors displaced from each other by 120° in a clockwise direction. With the position of the rotor shown in Figure 21 and the clockwise rotation of the pole, the emf induced in coil aa’ is maximum. The emf in conductor b of coil bb´ will be maximum when the pole turns through an angle 120° clockwise direction. Therefore, conductor b attains its maximum emf 120° later than the maximum emf in conductor a. Similarly, conductor c attains its maximum emf 120° later than the maximum emf in conductor b; in other words, 240° later than the maximum value in conductor a.
In this case the emfs induced in conductors a, b and c are equal in magnitude but 120° apart. The waveform and phasor diagrams are shown in Figures 22 and 23, respectively.
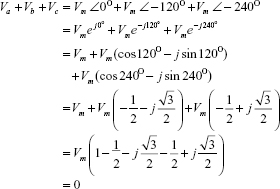
From Figure 23, we have
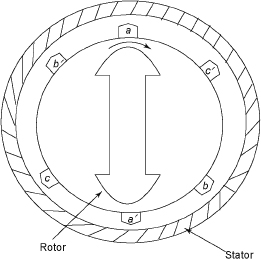
Figure 21 Generation of 3-phase Voltage
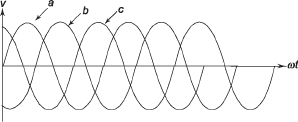
Figure 22 Waveform Diagram of Figure 21
Figure 23 Phasor Diagram of Figure 21
The sum of Equation (26), (27) and (28) becomes
ADVANTAGES OF THREE-PHASE SYSTEM
The three-phase system has the following advantages compared to a single-phase system:
- It is more economical as it requires less conductor material compared to a single-phase system.
- A three-phase machine gives more output compared to a single-phase machine of the same size.
- Three-phase motors have uniform torque, whereas most of the single-phase motors have pulsating torque.
- Domestic power and industrial or commercial power can be supplied from the same source.
- A three-phase motor produces more torque as compared to a single-phase motor.
- Three-phase induction motors are self-starting, whereas single-phase motors are not self-starting.
- Voltage regulation is better in a three-phase system.
PHASE SEQUENCE
The three phases may be denoted by a, b and c or R, Y and B where R, Y and B indicate red, yellow and blue, respectively. RYB has commercial usage. abc or RYB is taken as a positive sequence, whereas acb or RBY is taken as a negative sequence.
INTERCONNECTION OF THREE PHASES
The three separate armature coils of the three-phase alternator are shown in Figure 24.
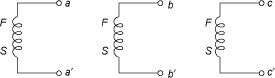
Figure 24 Three separate armature coils
STAR AND DELTA CONNECTIONS
The three armature conductors in a three-phase generator are not generally interconnected. They may be connected in the star (Y) or delta (A) form. The star connection of the three-armature conductors is shown in Figure 25 where all the similar ends a’, b’ and c’ are at the starting point. The terminals a’, b’ and c’ are joined to form the neutral terminal (N). In a star connection, similar ends are connected (the ‘s’ in star indicates similar ends). The neutral conductor may or may not be present. If it is present, it is called a three-phase four-wire system. Otherwise, it is a three-phase three-wire system. The delta connection of the three-armature conductor is shown in Figure 26. In a delta connection (the ’d’ in delta indicates dissimilar ends), dissimilar ends are interconnected.
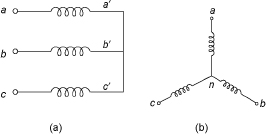
Figure 25 Star Connection
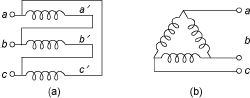
Figure 26 Delta Connection
VOLTAGES, CURRENTS AND POWER IN STAR CONNECTIONS
Figure 27 shows the three-phase three-wire system. The voltages V, Vb and V are called phase voltages, whereas the voltages Vab, Vbc and Vca are called line voltages, and the phase current (IP) in each phase is equal to the line current in each line because each line is in series with its individual phase winding.
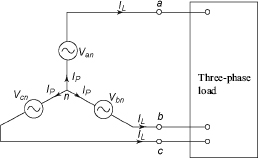
Figure 27 Star Connection of the Circuit
Let

VP indicates the magnitude of phase voltage.
Now,

Similarly,
![]()
and,
![]()
Figure 28 shows the phasor diagram.
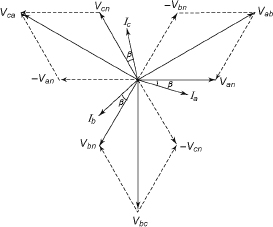
Figure 28 Phasor Diagram
So the magnitude of line voltage is ![]() times the magnitude of phase voltage. In this case, IP = IL. The active or true power in each phase of the circuit is given by Vp Ip cos β, where β is the angle between each phase voltage and its corresponding phase current. The total three-phase power (P) is expressed as
times the magnitude of phase voltage. In this case, IP = IL. The active or true power in each phase of the circuit is given by Vp Ip cos β, where β is the angle between each phase voltage and its corresponding phase current. The total three-phase power (P) is expressed as
![]()
i.e.,
Similarly, total reactive power (Q) is expressed as
![]()
i.e.,
Q is positive when the load is of the inductive type, and it is negative when the load is of the capacitive type.
The total apparent power of the three phases ![]()
VOLTAGES, CURRENTS AND POWER IN DELTA CONNECTIONS
Figure 29 shows three voltage sources connected in delta. In Figure 29, the phase voltages and line voltages are identical, but the line currents and phase currents are not identical.
Here, taking Iab as reference, we have
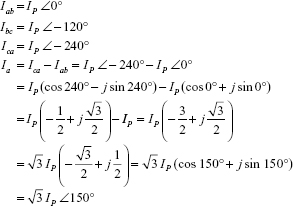
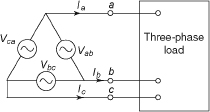
Figure 29 Delta Connection of the Circuit
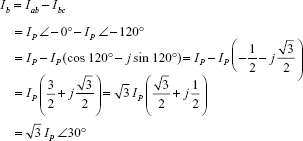
and

The phasor diagram is shown in Figure 30.
From Figures 29 and 30, it can be seen that phase voltages are equal to line voltages. If IP is the magnitude of phase current and IL is that of line current,
![]()
then the total three-phase true or real power (P) is expressed as follows:
![]()
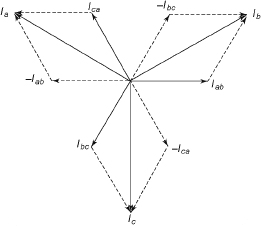
Figure 30 Phasor Diagram
The total three-phase reactive power (Q) becomes
![]()
Apparent power ![]()
For Star Connections
- Phase voltage
 line voltage; delta connection phase voltage = line voltage. Thus, for a given phase voltage, Y, the connected alternator gives more line voltage and the insulation of the armature winding will not be costly.
line voltage; delta connection phase voltage = line voltage. Thus, for a given phase voltage, Y, the connected alternator gives more line voltage and the insulation of the armature winding will not be costly. - As the star point is available in a star-connected alternator, the star point is connected to the ground. From the point of view of protection, it is advantageous.
A practical connection is shown in Figure 31. The load is normally distributed among the phases in order to keep the system as balanced as possible.
Here, suppose the line voltage is 400 V. The phase voltage to each domestic consumer will be
 Figure 31 shows that the domestic consumer (single-phase) as well as the industrial consumer (three-phase) can be supplied.
Figure 31 shows that the domestic consumer (single-phase) as well as the industrial consumer (three-phase) can be supplied.
Figure 31 Connection of Domestic and Industrial Load
MEASUREMENT OF THREE-PHASE POWER
In this method, wattmeter W1 is inserted in phase a and wattmeter W2 is inserted in phase c. Their pressure coils are connected in phase b shown in Figure 32. Figure 33 shows the phasor diagram.
The sum of instantaneous power measured by W 1 and W2 is expressed as
Therefore, W is the total instantaneous power of a three-phase circuit.
Figure 33 depicts a balanced load, and the currents in each phase lag behind the corresponding phase voltages by an angle θ from the phasor diagram; the current passing through the current coil of W1 lags behind the line voltage Vab by an angle 30° + θ. Similarly, the current passing through the pressure coil of W2 lags behind the line voltage Vcb by an angle 30° – θ
Now, the magnitude of line voltage (VL) is ![]() times the phase voltage VP; that is, (VL) =
times the phase voltage VP; that is, (VL) = ![]() Let the value of current in each phase be IP. So, the line current (IL) = IP. The line voltage magnitude VL and line current IL, are the rms values.
Let the value of current in each phase be IP. So, the line current (IL) = IP. The line voltage magnitude VL and line current IL, are the rms values.
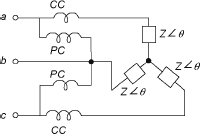
Figure 32 Two-wattmeter Connection
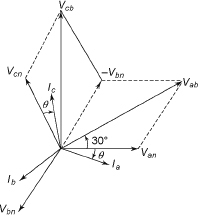
Figure 33 Phasor Diagram
Dividing Equation (32) by Equation (31), we have
![]()
Since W1 = VL IL cos (30° + θ) and W2 = VLIL cos (30° – θ) the following cases are discussed:
- When θ = 0°, that is, the power factor is unity (resistive load), it can be written as W1 = W2 = VLIL cos 30°
The readings of both wattmeters are equal in magnitude. - When θ = 60°, that is, the power factor = 0.5 lagging,
W1 = VLIL cos(30° + 60°) = VLIL cos90° = 0 and W2 = VLIL cos(30° – 60°) = VLIL cos 30°. 0 - When 90° > θ > 60°, the reading of W2 is positive and that of W1 is negative.
- When θ = 90° (pure inductive load),
W2 = VLIL cos(30° – 90°) = VLIL cos (-60°) = VLIL cos 60° = VLIL sin 30°
W1 = VLIL cos(30° + 90°) = –VLIL sin 30°
∴W1 + w2 = 0
The above facts are for a lagging power factor load. For a leading power factor load, θ will be replaced by -θ in the expression of W1 and W2.
W1 = VLIL cos(30° – θ)
and W2 = VLIL cos(30° + θ)
During the experiment if any wattmeter shows a negative reading, it is necessary to reverse either its pressure coil or its current coil, usually the former. The reading of the wattmeter after the reversal of the pressure coil is to be taken as negative. In the above case, the abc phase sequence has been taken as positive.
PRINCIPLE OF ENERGY CONVERSION
The main aim of the principle of energy conversion is to estimate forces. The energy conversion can be neither created nor destroyed, but it can be converted from one form to the other. A typical electromechanical system is shown in Figure 34.
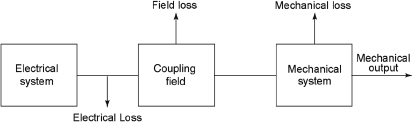
Figure 34 Electromechanical Energy Conversion System
The main parts of the system are as follows:
- an electrical system,
- a coupling field system and
- a mechanical system.
The energy transfer equation is expressed as

The total energy losses in the system include I2R losses in the resistance of the winding of the electrical system, core loss in the field due to having of magnetic field in core as well as the mechanical loss in the form of friction and windage loss due to motion of mechanical components in the mechanical system. The total losses are converted into heat. Equation (34) becomes

In differential form, Equation (35) becomes
where dWf represents change in energy stored in the field neglecting the core loss which is generally small and dWm represents mechanical energy output when mechanical losses (friction and windage losses) are neglected.
ENERGY IN THE COUPLING FIELD
In rotating machines, the coupling field is the link between the stationary and movable members. In order to rotate the rotating member, an air gap must exist between the stator and the rotor. The energy stored in the coupling field must produce action on the electrical and mechanical system to ensure conversion of energy from electrical to mechanical (motoring mode) or from mechanical to electrical (generating mode).
In DC machines, the field system is a stationary member whereas the armature is a rotating member. For mechanical output (motoring mode), the coupling field must react with the electrical system to absorb the electrical energy from it. For electrical output (generating mode), the coupling field must react with the mechanical system to absorb mechanical energy from it. The reaction between the coupling fields with the electrical or mechanical system depends on the operating mode of the device. Since the torque (T) and the induced emf (e) are associated with the coupling field, it is termed as electromechanical coupling. Due to the inertia of the electromechanical coupling devices, these are slow-moving devices. Since the variation of the coupling field with time during energy conversion is slow, the electromagnetic radiation losses are neglected.
ENERGY IN THE FIELD
Figure 35 shows a simple electromechanical energy conversion system, which is a singly excited system because only one winding receives electrical energy.
A spring control is used to hold the movable part of the system in a static equilibrium. The movable part is held at an air gap ‘g’. The current in the winding is increased from 0 to i and hence the flux is established. Since the movable part is stationary, dWm is zero and we have
Equation (37) indicates that all the electrical energy input is stored in the energy field because the core loss is neglected. For the flux linkage ‘λ’, the back emf induced in the winding becomes
The electrical energy input to the system is expressed as
From Equation (38) and (39), we have
![]()
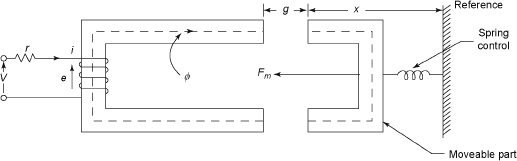
Figure 35 Electromechanical Energy Conversion System
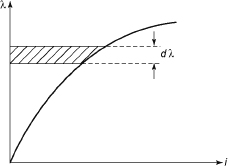
Figure 36 λ–i Characteristic for the System
where λ is increased from 0 to λ.
Figure 36 shows the relation between flux linkages and the current in the coil for Figure 35. The hatched portion of Figure 36 shows the incremental energy stored in the field. The total energy stored in the field is the space between X-axis and the curve (λ – i).
Let
N be the total turns of the system,
i be the input current,
Hc be the magnetic field intensity in the core,
Hg be the magnetic field intensity in the air gap,
lc be the length of the magnetic core material and
lg be the length of the air gap.
We have
If the cross-section area of the core material and uniform magnetic flux density are A and B, respectively, we have
Substituting dλ in Equation (41), we have
![]()
Let
Wfc be the energy density in the core ![]()
Wfg be the energy density in the air gap ![]()
Vc be the volume of the core material and
Vg be the volume of air gap.
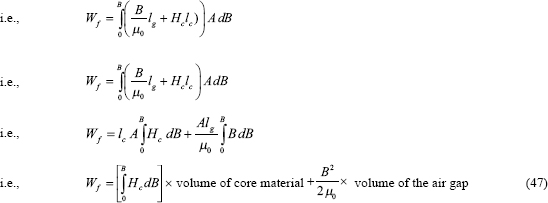
Equation (47) becomes
The supplied energy to the system is partly stored in the magnetic field and partly in the air gap. The energy stored in the air gap is much larger than the energy stored in the field. The energy stored in the field is expressed as
CO-ENERGY
The magnetic material and the air gap length decide the flux linkage—the current characteristic of the electromagnetic system. The λ–i characteristic of the electromechanical system shown in Figure 35 is illustrated in Figure 37(a) for different air gap length. The characteristic becomes more linear when the air gap length is increased as shown in Figure 37(a).
From Figure 37(b), the energy stored in the magnetic field ’Wf'. is the hatched portion between the λ-axis and the λ–i characteristic. The hatched portion between the λ–i characteristic and the i-axis represents the co-energy (W'f) of the system, which is used to estimate force or torque in an electromagnetic system as explained below. The co-energy (W'f) of the system is expressed as
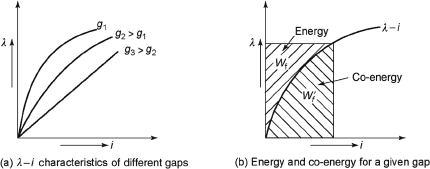
Figure 37 Co-energy
The total energy of the system is expressed as
Due to the non-linearity of the electromechanical system, co-energy is more than the energy stored in the magnetic field.
For linear systems,
ELECTRICAL ENERGY INPUT TO THE SYSTEM
A simple electromagnetic system with a single excited coil shown in Figure 35 is considered here. At any instant the terminal equation is represented by
In Equation (53), v is the instantaneous input voltage, i is the instantaneous input current and e is the back emf.
If λ is the instantaneous flux linkage, we have
Substituting ‘e’ in Equation (53), we have
From Equation (55), we have
iv dt = i2 r dt + i dλ
i.e., i(v – ir)dt = i dλ
The elementary energy input to the system
We know that
where N is the total number of turns of the exciting coil and Φ is the instantaneous flux linking with the coil.
From Equation (56), we have
Most of the flux is confined to the core of the excited coil made of ferromagnetic material and the core extracts energy from the supply system for the case of change of flux linkage.
This change of flux causes the back emf that is responsible for extracting energy from the electrical system.
ESTIMATION OF MECHANICAL FORCES IN AN ELECTROMAGNETIC SYSTEM
Figure 38 shows the λ – i characteristic of the system when the moving part of the electromechanical system shown in Figure 35 is shifted from × = x1 to × = x2. The change of the λ – i characteristic shown in Figure 38(a) is for a system whose moving part moves very slowly and the excitation during this period of motion is assumed to be constant, whereas the λ – i characteristic shown in Figure 38(b) is for a system whose moving part is assumed to change its position very quickly. Let us consider the following cases.
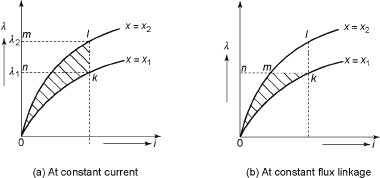
Figure 38 Locus of Operating Point on λ – i Characteristic
Case 1: Motion of the Moving Part Is Very Slow
For this case the excitation current is assumed to be constant during this period. When the moving part is shifted from x = x1 to x = x2, the λ – i characteristic moves upwards due to the decrease of the air gap length. The operating power in this case moves from k to l and the change of electrical energy during this case is given by
Energy stored in the magnetic field is expressed as
The mechanical work done by the moving part is expressed as
dWm = dWe – dWf
= area klmn – (area olm – area okn)
= area klmn + area okn – area olm
= area okl
= hatched portion of Figure 38(a)
The shaded portion of Figure 38(a) represents the mechanical work done when the motion of the moving part is under constant current conditions which is also increase of co-energy and we have
If the mechanical force Fm, acts on the moving part to cause a displacement of dx, we have
Fm dx = elementary work done
=dWm
=dW'f
The force represented by Equation (63) acts on the moving part in such a direction so that it increases the stored energy of the system at constant current.
Case 2: Motion of the Moving Part Instantaneously
Figure 38(b) shows that the flux linkage with the exciting winding remains constant during the instantaneous motion of the moving part. The mechanical work done is represented by the hatched area okm and the field energy decreases. We have
Fmdx=dWm=-dWf
The negative sign in Equation (64) is due to decrease of the stored energy. During the instantaneous motion of the moving part, electrical energy input (dWe) becomes zero due to the constant flux linkages. The requirement of mechanical energy output is met from the stored energy of the field, which causes the decrease of field energy. For small displacement, the area klm can be neglected.
ESTIMATION OF MAGNETIC FORCE IN LINEAR SYSTEMS
The reluctance of the magnetic path of the electromechanical system shown in Figure 35 is negligible compared to the air gap and hence the λ – i characteristic of the system becomes linear, causing the inductance to depend on the air gap.
From Equation (64), the magnetic force (Fm) is expressed as
For a linear system, energy is equal to co-energy and ![]()
From Equation (63), we have
Equation (68) and (69) show that the force obtained is the same. The entire mmf drop will be in the air path if the reluctance of the electromechanical system shown in Figure 35 is neglected. We have
The energy in the field is

From Equation (63), the magnetic force becomes
The force per unit area ![]()
DOUBLY EXCITED SYSTEMS
Figure 39 shows a rotatory electromagnetic system having the moving part known as the rotor. The fixed part of this system is known as the stator. Since the stator and rotor carry separate windings, this system is known as doubly excited system. The rotor is usually mounted on the shaft, which moves freely between the poles of the stator.
The rotor current Ir is fed through slip rings. Is is known as stator current. Let es and er be the induced emfs in the stator and rotor windings. The energy stored in the magnetic field of the system for no mechanical output is expressed as
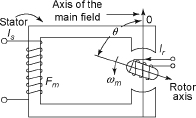
Figure 39 Rotatory Electromagnetic System Having the Moving Part
Equations (73) and (74) can be expressed in terms of inductances for linear systems. The inductances also depend on the position of angle of rotor (θ). We have the following expressions:
and
where Lss is the self-inductance of the stator winding, Lrr is the self-inductance of the rotor winding and Lsr or Lrs is the mutual inductance between the stator and rotor windings. For linear systems, Lsr = Lrs, Equations (75) and (76) can be expressed as

Substituting λs and λr in Equation (74), we have

The total field energy is expressed as
![]()
i.e.,
The torque developed in the rotational system can be expressed as
![]()
In a linear system, since Wf = W´f
The first two terms in the right-hand side of Equation (80) are the torque due to the variation of self-inductance of the stator and rotor and are known as reluctance torque, whereas the third term is due to variation of mutual inductance between the stator and rotor windings. Please see Appendix B for Reluctance motor.
CYLINDRICAL ROTATING MACHINE
A cylindrical two-pole rotating machine consisting mainly of the rotor and stator is shown in Figure 40. They are provided with the distributed winding and assumed to be one slot/pole/phase for the sake of simplicity. If the effect of slots is neglected, the reluctance of magnetic path between the stator and rotor will be invariant. Let the inductance of the stator and the rotor windings be Lss and Lrr, respectively.
Since Lss and Lrr remain constant if the effects of the slots are neglected, no reluctance torque is produced. But due to variation in mutual inductance (L) between stator and rotor windings, the torque is given by
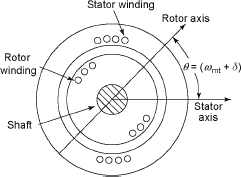
Figure 40 Cylindrical Rotating Machine
Also, Lsr = Mcos θ, where θ = ωmt + δ, M is th emaximum value of mutual inductance between the stator and the rotor, ωm is the angular velocity of the rotor, δ is the initial position of the rotor axis with respect to the stator axis at t = 0 and θ is the angle between magnetic axes of the stator and the rotor.
Let the instantaneous current in stator and rotor windings be
and
where ω = 2 πfs and ωr = 2πfr.
Here, fs and fr are the supply frequency corresponding to the stator and rotor, and α is the phase difference between is and ir. Substituting for is and ir in Equation (81), we have
Equation (84) shows that instantaneous torque Tt' which varies sinusoidally with time. The average torque will be non-zero when the coefficient of t is 0.
Therefore, Motion of the Moving Part Is Very Slow
The above condition shows that the torque is developed in the machine when it runs at a speed equal to the sum or difference of synchronous speeds corresponding to the supply frequencies of rotor and stator currents.
Case 1: Synchronous Motor/Machine
In this stator, supply is three-phase balanced currents and rotor supply is DC current. Therefore, ωr = 0, α = 0, ωm = ω and Ir = Idr.
The condition ωm = ωs indicates that the machine is rotating at synchronous speed corresponding to stator supply frequency. Substituting the above values in Equation (84), the expression is reduced as

This instantaneous torque expression shows that the torque is pulsating in nature with non-zero average value. The average torque is
Equation (87) shows that when the rotor runs at a speed (ωm = ωs), the machine develops an average non-zero torque. The condition derived from Equation (84) also confirms that the synchronous motor is not self-starting when ωm = 0. If the rotor is wound with single winding, it is called a single-phase synchronous motor. But due to pulsating field instead of rotating field, even though single-phase machine runs at synchronous speed, it produces noise and vibrations. This is eliminated by having three-phase winding on the stator.
Case 2: ωm = ωs – ωr
When the stator and the rotor of the machine shown in Figure 40 carry AC currents at different frequencies, the motor runs at asynchronous speed ωm = ωs – ωr. The instantaneous torque developed is obtained by substituting ωm = ωs – ωr in Equation (84) as
The average value of this pulsating torque is expressed as
This is the torque developed in the inductor motor. In the three-phase induction motor, both stator and rotor currents are at different frequencies but the machine runs at synchronous speed. It has the self-starting torque.
When ωm = 0, the average torque given in Equation (89) becomes zero, which is the same as that of the single-phase induction motor. To remove the nature of the pulsating torque, as given in Equation (88), the stator should carry three-phase winding as in the polyphase induction motor. Therefore, it can be concluded that the torque can be produced in rotating machines under two conditions: by variation in the reluctance of the magnetic path by rotating the rotor and by variation in mutual inductance between the stator and the rotor. But the torque that is produced is very small as in the case of the reluctance motor.
Example 1 For an electromagnetic system, the λ–i relation is given by (g = air gap length). Determine the mechanical force on the moving part of the system ![]() using
using
(i) energy of the system and
(ii) co-energy of the system.
Use i = 4 A and g = 5 cm.
Solution
i = 4 A, g = 5 cm and ![]() i.e., i = (λg)2
i.e., i = (λg)2
The negative sign in both the cases indicates that force acts in such a direction so as to decrease the air gap length.
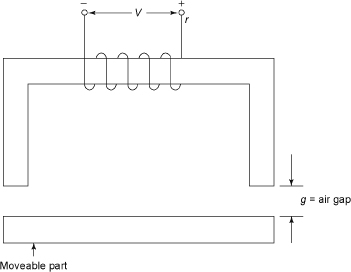
Example 2 The electromagnet shown in Figure E1 is wound with a coil which has 200 turns and a resistance of 2Ω. The air gap length is each of 5 mm and the magnetic core has a square cross-section of 2 cm × 2 cm. An average force of 300 N is required to lift the sheet of steel. For DC supply (1) source voltage and (2) energy stored in the magnetic field for 50 Hz AC supply. Determine the AC source voltage. Assume that the reluctance of core is negligible.
Solution
Given: F = 300 N, r = 2 Ω, g = 0.5 mm, A = 2 × 2 cm2 and N = 200.
Energy in the air gap =

The mmf of the exciting coil = Hclc + Hglg
NI = 2 × (Hglg) since the core has zero reluctance
![]()
i.e., ![]()
DC voltage source required = 7.72 × 2 = 15.44 V
Energy stored in the air gap = ![]() × volume of the air gap
× volume of the air gap
![]()
(b) AC excitation:
Impedance of the coil = R + jωL
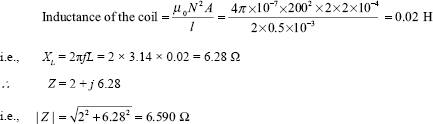
The rms value of the current in the coil = 7.72 A
AC voltage required = 7.72 × 6.59 = 50.87 V
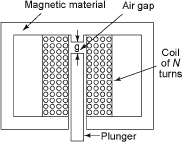
Example 3 A magnetic actuator is shown in Figure E2. The cross-sectional area of the plunger = 3 cm × 3 cm. The coil has 000 turns and a resistance of 5 Ω. A voltage of 12 V DC is applied to the coil terminals.
- Assuming flux density in the air gap is 1.5 T. Determine the air gap g (in mm) and stored energy in the air gap.
- Obtain an expression for the force on the plunger as a function of air gap length. Assume that the reluctance of magnetic material of the core is negligible.
Solution
Let x be the air gap at any time t where the plunger moves upwards in the direction of mmf and i be the current in the coil.
Hg = mmf in the air gap = ![]()
![]()
Inductance = flux linkage/current
Let A be the cross-sectional area of the plunger.
Φg = flux in the air gap = Bg × A
Ψg = flux linkages with the coil = NBgA
L(x) = inductance of the coil = ![]()
Energy stored in magnetic field ![]() × volume of air gap
× volume of air gap
![]()
Force acting on the plunger 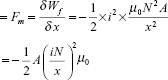
Mechanical work done by the plunger during motion:
![]()
Given: Bg = 1.5 T, N = 000, A = 9 cm2, Vt = 1.2 V and R = 5 Ω.
Current through the coil = voltage/resistance ![]()
![]()
i.e, ![]()
Stored energy in the air gap
L(x) = inductance of the coil ![]()
Force acting on the plunger ![]()