
Chapter 7
Random Trip Models
In this chapter, we will present and analyze the properties of a class of mobility models introduced in Le Boudec and Vojnovic (2006) called random trip models. This class of mobility models is very general, and includes most of the mobility models described in the previous chapters such as random walks and random waypoint, as well as many mobility models which will be described in forthcoming chapters. The importance of the class of random trip models lies in the fact that, if a mobility model is proved to belong to this class, fundamental model properties such as the existence and characterization of a stationary regime can be established based on the framework developed for the general class of random trip mobility models.
In what follows, we will first formally define the class of random trip mobility models, and present theoretical results derived by Le Boudec and Vojnovic (2006) concerning the existence and characterization of the stationary regime for a random trip mobility model. We will then conclude the chapter with specific instances of mobility models belonging to this general class.
7.1 The Class of Random Trip Models
Informally, a random trip is a model of random, independent node movements. Note that the requirement of independent movements implies that group mobility models do not belong to the class of random trip models. Formally speaking, the random trip model is defined by the notions of domain, phase, path, and trip, and by the definition of a default initialization rule:
![]()
In order for a mobility model to belong to the class of random trip models, the following conditions on phase, path, and trip duration must be fulfilled. Note that a formal definition of these conditions is sometimes involved, requiring an understanding of non-trivial mathematical concepts. In what follows we have tried to simplify notation and presentation as much as possible, while only minimally sacrificing mathematical rigor. For a more rigorous definition of the conditions stated below, the reader is referred to Le Boudec and Vojnovic (2006).
7.1.1 Conditions on Phase and Path
The following conditions on phase and path must be satisfied:
![]()
![]()
![]()
![]()
7.1.2 Conditions on Trip Duration
Random variables Sn describing trip duration must satisfy the following properties:
![]()
![]()
7.2 Stationarity of Random Trip Models
As mentioned at the beginning of this chapter, the importance of the class of random trip models lies in the fact that a formal characterization of necessary and sufficient conditions for the existence of a stationary regime has been derived for mobility models belonging to this class, as well as a characterization of the stationary state distribution in case a stationary regime exists. These results are summarized in the following theorem, derived by Le Boudec and Vojnovic (2006).
In what follows, the state of the mobile node at time t is described by the Markov process
![]()
where Y is the Markov chain describing the phase and path at time t, S(t) is the duration of the trip which is being undertaken at time t, and U(t) ∈ [0, 1] is the fraction of elapsed time on the current trip at time t.
![]()
![]()
Informally speaking, the theorem states that there exists a stationary regime for a random trip model if and only if the expected duration of a trip is finite, and characterizes the stationary distribution (conditions 1 and 2); if the expected trip duration is not finite (condition 3), then the Markov process is null-recurrent, that is, the mean number of transitions between successive visits to a regeneration set is infinite, and there exists no stationary regime.
7.3 Examples of Random Trip Models
In this section, we present examples of mobility models belonging to the class of random trip models. We start with an informal proof of the fact that the random waypoint mobility model is a random trip model (for the formal proof, see Le Boudec and Vojnovic (2006)). We then describe a few other mobility models which are shown in Le Boudec and Vojnovic (2006) to belong to the class of random trip models.
7.3.1 Random Waypoint Model
Let us consider the classical random waypoint mobility model on a convex region (say, on the unit disk). In order to prove that the model is a random trip model, we first have to define the domain, path, trip duration, and default initialization rule, and then prove the relative properties—recall Section 7.1.
![]()
We now verify that conditions on phase, path, and trip duration are fulfilled.
Since the expected duration of a trip in the random waypoint model is clearly finite, we have that, according to Theorem 7.1, the random waypoint model has a uniquely defined stationary regime. Note that the stationary regime as defined within the context of random trip models includes both the stationary node spatial distribution (given by random variable X(t) defined as in Section 7.1) and the node speed. Thus, the framework of random trip models can be seen as a more formal way of characterizing the node spatial distribution and average nodal speed of the random waypoint model which were described in Chapter 5.
7.3.2 RWP Variants
Several variants of the random waypoint mobility model have been proved in Le Boudec and Vojnovic (2006) to belong to the class of random trip models:
- The Swiss flag mobility model: in this mobility model, the domain
 is a non-convex set corresponding to the interior of a Swiss cross—see Figure 7.1. The set of phases is the same as in the original random waypoint model. The set of paths when in move phase is the set of shortest paths between any two points
is a non-convex set corresponding to the interior of a Swiss cross—see Figure 7.1. The set of phases is the same as in the original random waypoint model. The set of paths when in move phase is the set of shortest paths between any two points  , where the path is entirely inside
, where the path is entirely inside  —see Figure 7.1. The set of pause paths is defined as in the original random waypoint model. The trip selection rule chooses a new endpoint uniformly in
—see Figure 7.1. The set of pause paths is defined as in the original random waypoint model. The trip selection rule chooses a new endpoint uniformly in  , and the next path is the shortest path from the current to the next endpoint. In case there are several such paths, one of them is selected uniformly at random. The rules for trip duration selection are the same as in the original random waypoint model.
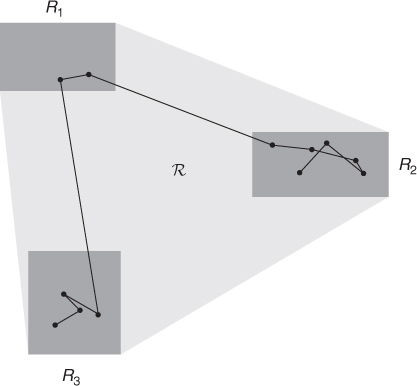
, and the next path is the shortest path from the current to the next endpoint. In case there are several such paths, one of them is selected uniformly at random. The rules for trip duration selection are the same as in the original random waypoint model. - The restricted random waypoint model: the model was originally introduced in Blazevic et al. (2004), but it is defined in a more general way in Le Boudec and Vojnovic (2006). In this model, the domain
 is the convex closure of a set of convex sub-domains R1, …, Rk—see Figure 7.2. Trip endpoints are chosen in the sub-domains Ri according to the following rule. Suppose the node starts from a point x0 ∈ Ri. The number r of trip endpoints to be chosen in Ri is selected according to a probability distribution Fi(), specific to the sub-domain. For the next r trips, endpoints are chosen uniformly at random in Ri. After the rth trip, a new sub-domain Rj, with j possibly equal to i, is chosen according to a probability distribution Fdomain, i(). The destination for the (r + 1)th trip is chosen uniformly at random in Rj, and the path from the last destination in sub-domain Ri to the first destination in Rj is a line segment. The rules for trip duration selection are the same as in the original random waypoint model.
is the convex closure of a set of convex sub-domains R1, …, Rk—see Figure 7.2. Trip endpoints are chosen in the sub-domains Ri according to the following rule. Suppose the node starts from a point x0 ∈ Ri. The number r of trip endpoints to be chosen in Ri is selected according to a probability distribution Fi(), specific to the sub-domain. For the next r trips, endpoints are chosen uniformly at random in Ri. After the rth trip, a new sub-domain Rj, with j possibly equal to i, is chosen according to a probability distribution Fdomain, i(). The destination for the (r + 1)th trip is chosen uniformly at random in Rj, and the path from the last destination in sub-domain Ri to the first destination in Rj is a line segment. The rules for trip duration selection are the same as in the original random waypoint model. - The random waypoint on sphere: this is a version of the random waypoint model in which the domain is the surface of the unit sphere in
 . The path between two endpoints x1, x2 (chosen uniformly at random on the surface of the sphere) is the shortest of the arcs on the circle of unit radius passing through x1, x2. If the two arcs have the same length, one of them is chosen uniformly at random. Rules for trip duration selection are as in the original random waypoint model.
. The path between two endpoints x1, x2 (chosen uniformly at random on the surface of the sphere) is the shortest of the arcs on the circle of unit radius passing through x1, x2. If the two arcs have the same length, one of them is chosen uniformly at random. Rules for trip duration selection are as in the original random waypoint model.
Figure 7.1 The Swiss flag mobility model. Depending on the position of endpoints, a path can be composed of either one or two linear segments.
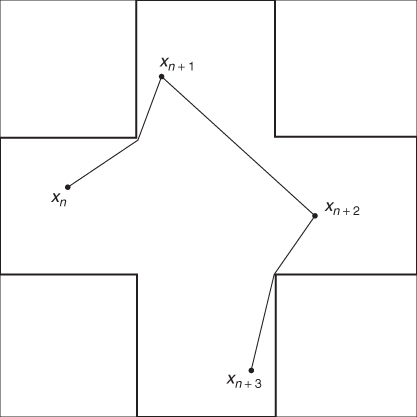
Figure 7.2 The restricted waypoint mobility model with three mobility sub-domains.
7.3.3 Other Random Trip Mobility Models
These are as follows:
- Space graph model: in this model, originally introduced in Jardosh et al. (2003), there exists a set
 from which waypoints are chosen, corresponding to the set of possible destinations on a map. The mobility domain
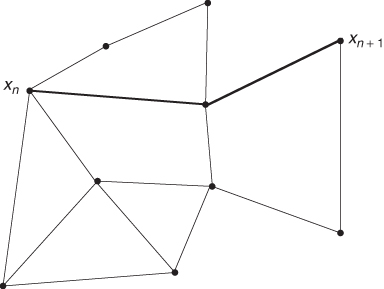
from which waypoints are chosen, corresponding to the set of possible destinations on a map. The mobility domain  corresponds to the union of R1 with the edges of the planar graph connecting the points in R1—see Figure 7.3. The rules for trip selection are similar to that of the restricted waypoint mobility model with a single mobility sub-domain. This model is very similar to the vehicular mobility model introduced in Tian et al. (2002).
corresponds to the union of R1 with the edges of the planar graph connecting the points in R1—see Figure 7.3. The rules for trip selection are similar to that of the restricted waypoint mobility model with a single mobility sub-domain. This model is very similar to the vehicular mobility model introduced in Tian et al. (2002). - Random walk on torus: this is the classical time- and space-continuous random walk model on a bounded domain (say, a rectangle), where a wrap-around border rule is used. The trip selection rule dictates that a speed vector Vn and a trip duration Sn are chosen independently, according to some time-invariant probability distributions.
Figure 7.3 The space graph mobility model: waypoints are nodes in a spatial graph; trajectories correspond to shortest paths in the spatial graph.
Blazevic L, Le Boudec JY and Giordano S 2004 A location-based routing method for mobile ad hoc networks. IEEE Transactions on Mobile Computing 3, 97–110.
Jardosh A, Belding-Royer E, Almeroth J and Suri S 2003 Towards realistic mobility models for mobile ad hoc networking. Proceedings of the ACM International Conference on Mobile Computing and Networking (MOBICOM), pp. 217–229.
Le Boudec JY and Vojnovic M 2006 The random trip model: Stability, stationary regime, and perfect simulation. IEEE/ACM Transactions on Networking 14, 1153–1166.
Tian J, Hahner J, Becker C, Stepanov I and Rothermel K 2002 Graph-based mobility model for mobile ad hoc network simulation. Proceedings of the ACM/IEEE Annual Simulation Symposium, pp. 337–344.