
Chapter 11
Vehicular Networks
In this chapter, we will describe in brief the main features of an emerging class of next generation wireless networks, namely, vehicular networks. After describing the reasons for the growing interest in vehicular networks from the research, as well as the governmental and industrial, communities, we will describe the state of the art. We will then present some representative use cases and conclude the chapter by commenting on envisioned technological evolutions in the near future, and the related challenges.
11.1 Vehicular Networks: State of the Art
Vehicular networks are short-range wireless networks formed by vehicles traveling on the road. Besides communicating with nearby vehicles, a vehicle could also communicate with radio devices installed on road side equipment such as traffic lights, lamps, etc. An important observation regarding terminology is that by the term “vehicular network” we mean a network where short-range wireless links are established either between different vehicles –V2V communications—or between a vehicle and a road side unit (RSU)—V2I communications. That is, we are not concerned with in-vehicle wireless networks, such as those formed by various Bluetooth devices co-located in a vehicle, which are also sometimes called “vehicular networks.”
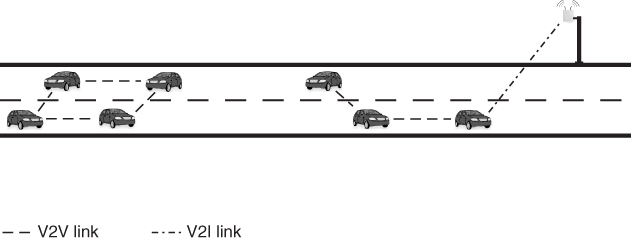
A typical vehicular network architecture in an urban scenario is depicted in Figure 11.1: V2V and V2I links coexist and form a relatively dense network of vehicles, especially close to road traffic hotspots such as junctions, intersections, and so on. On the other hand, in highway scenarios the vehicular network is typically relatively less dense and mostly formed of V2V links, except for occasional connections with RSUs—see Figure 11.2.
Figure 11.1 A typical vehicular network architecture in an urban scenario.
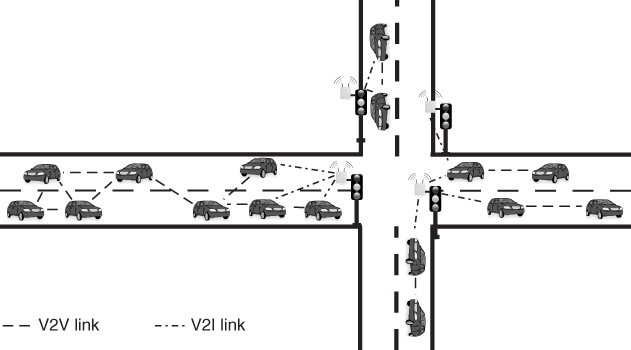
Figure 11.2 A typical vehicular network architecture in a highway scenario.
From an architectural point of view, vehicular networks are hybrid networks sharing features with MANETs—the part of the network formed by V2V links—and opportunistic networks—the occasional occurrence of V2I links. Also, network density can vary from highly dense, mostly connected networks—the urban scenarios—to sparse, mostly disconnected networks—the suburban and highway scenarios. In the urban setting, RSUs can be thought of also as a light infrastructure that can be exploited to optimize network operation.
A distinguishing feature of vehicular networks, independently of the specific scenario, is a high degree of mobility, which results in a highly dynamic network topology. As we will see in the following, dealing with highly dynamic topologies challenges the wireless communication and networking solutions that are being developed for vehicular networks.
11.1.1 Motivation
What are the reasons behind the increasing attention and the considerable research and development efforts being devoted to vehicular networks? Some statistical data may help the reader understand the main driving forces behind the development and consolidation of vehicular networking technology.
Despite alternative means of transportation such as trains, metros, aircraft, etc., becoming relatively more commonly used in recent years, road transport still dominates, by far, other means of transport. For instance, in Europe 45% of goods and 87% of passengers are transported along roads (Commission 2004). The number of passengers and goods traveling on roads keeps increasing, while the road network is destined to increase at a much lower rate. Thus, the density of vehicles traveling on roads is expected to increase in the near future, with a potentially negative impact in terms of traffic efficiency (fuel wastage, air pollution, etc.) and societal costs (number of accidents, road maintenance costs, etc.).
Although the density of vehicles is expected to increase in forthcoming years, most governments (e.g., in the USA, Europe, and Japan) have launched plans to reduce the enormous costs related to road traffic. To give the reader an idea of these costs, the World Health Organization estimates that 1.2 million people are killed every year in road accidents, the ninth leading cause of death in the world and the leading cause of death among adolescents and young adults (World Health Organisation 2008). The World Health Organization also estimates that, if no corrective actions are undertaken, road accidents will become the fifth leading cause of death in the world by 2030 (Organization 2009). In economic terms, the World Health Organization estimates the direct cost of road crash injuries to be between 1 and 2% of the gross domestic product of each country, amounting to about US$ 518 billion worldwide.
How is it possible to reduce the costs related to road transportation while the density of vehicles on the roads is expected to increase in forthcoming years? The consensus is that large-scale deployment of intelligent transport systems will be key to achieving such an ambitious goal.
Intelligent transport systems are a class of systems that integrate information and communication technologies with pre-existing transport infrastructure, vehicles, and users. Examples of these systems are induction loops, infrastructure variable message signs, traffic management centers, etc. Among intelligent transport systems, vehicular networks—also called cooperative vehicular systems—are considered a prominent player, due to their enormous potential of improving safety conditions on the roads and increasing traffic efficiency in general. This explains why government agencies have launched funding programs specifically aimed at the development and consolidation of vehicular communication and networking technology. Similarly, the automotive and electronics industries are devoting considerable resources to the development of vehicular networking solutions aimed at improving road safety conditions.
11.1.2 Standardization Activities
Although in principle different wireless technologies might be used to realize V2V and V2I links, a derivation of the well-known WiFi standard is currently being considered as the prominent radio technology for vehicular networks. The IEEE 802.11 working group recently (July 2010) released an amendment to the standard, called IEEE 802.11p, aimed at extending the standard for vehicular communications (both V2V and V2I).
IEEE 802.11p has been designed mainly to address the challenges related to a highly dynamic network topology at the MAC layer, and to challenging radio propagation conditions at the PHY layer.
At the MAC layer, procedures for setting up and operating a wireless link between two nodes have been significantly simplified with respect to IEEE 802.11a/b/g. In particular, the concept of Basic Service Set (recall Section 8.1), which introduces considerable complexity during the setup of a wireless link, has been dropped: in IEEE 802.11p, nodes can establish a wireless link on-the-fly, without the need for setting up an Independent BSS or joining a pre-existing BSS first. With this choice, the delay in accessing the wireless channel has been considerably reduced in IEEE 802.11p with respect to WiFi solutions, which is especially important considering the highly dynamic topology typically characterizing a vehicular network, with several links appearing/disappearing in the network in just a few seconds.
The IEEE 802.11p PHY layer is a modification of the 802.11a PHY layer, operating in a set of frequencies—slightly above those used in IEEE 802.11a—exclusively devoted to vehicular communications. In particular, 75 MHz of spectrum between 5.850 and 5.925 GHz are reserved in the USA for vehicular communications, while in Europe only 30 MHz of spectrum between 5.875 and 5.905 GHz have been reserved for the same purpose. Exclusively reserving a set of frequencies for vehicular communications is, on the one hand, tangible proof of government interest in vehicular networking technology and, on the other hand, an important action for ruling out the negative effect on communication performance of interference originated by other types of networks operating in the same range of frequencies—as would have been the case if the populated 2.4 GHz frequency band were used instead.
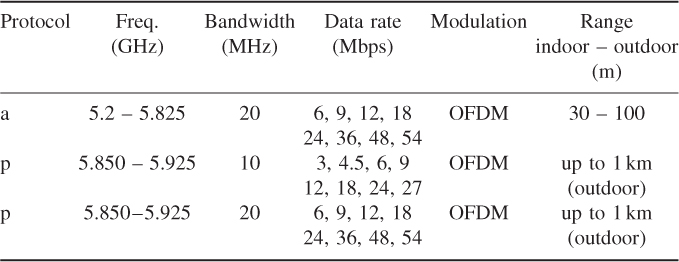
The main difference between the IEEE 802.11p and 802.11a PHY layers is channel width, which has been reduced from 20 to 10 MHz. The reason for using narrower channels is to combat the multi-path delay spread and Doppler effects, caused by high mobility and road environments. However, the standard allows use of 20 MHz wide channels by transmitting on two adjacent 10 MHz channels. The main features of the IEEE 802.11p PHY layer are given in Table 11.1, together with those of IEEE 802.11a. As can be seen from the table, except for a narrower channel width and slightly different range of transmission frequencies, the IEEE 802.11p PHY layer shares many features with those of 802.11a. However, a major difference between the two specifications lies in the much longer transmission range required for IEEE 802.11p, which can be achieved due to the higher transmission powers allowed in the 802.11p bands: up to 44.8 dBm (around 30 W) in the USA, compared to 20 dBm (around 100 mW) allowed in the 802.11a frequency bands.
Table 11.1 Main features of the IEEE 802.11a and 802.11p PHY layer specifications
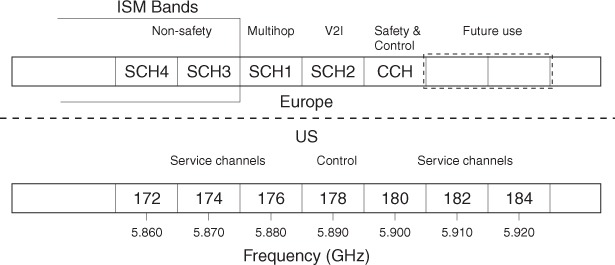
Another important difference between IEEE 802.11a/b/g (WiFi) and 802.11p is multi-channel operation; in WiFi, no specific rules for channel assignment are defined in the standard, so a WiFi device willing to discover other devices within transmission range must scan all available channels. This implies that discovery of other devices in the surroundings is a relatively slow process in WiFi. In vehicular networks, on the other hand, fast and reliable establishment of wireless links between vehicles is mandated by the very stringent application requirements (see next section). To improve the reliability and responsiveness of the vehicular wireless link, two actions have been undertaken: first, as explained above, a set of channels has been exclusively reserved for vehicular networks, to reduce interference from other types of networks; second, use of the available channels has been at least partially regulated, imposing specific requirements on the different channels in the IEEE 802.11p frequency band. In particular, one channel has been defined as the control channel, which is used both to quickly set up a wireless link between nearby vehicles and to exchange status information required by active safety applications (see the next section). So, different from WiFi networks, in IEEE 802.11p all vehicles must periodically tune their radios to the control channel to discover new vehicles and exchange status information, while the other available channels—called service channels—are left for communications related to other types of services. Channel allocation is slightly different in Europe and the USA (channel allocation for vehicular networks in Japan has not yet been decided), and is reported in Figure 11.3.
Figure 11.3 IEEE 802.11p channel allocation in Europe and the USA.
The IEEE 802.11p standard is part of a wider class of currently ongoing standardization activities in vehicular networks, encompassing not only the PHY and MAC layers, but also the upper levels of the network protocol stack. In particular, we mention the CALM (Communications Access for Land Mobiles) architecture promoted by ISO Technical Committee 204 Working Group 16 (204IT 2011) and the WAVE (Wireless Access in Vehicular Environment) initiative promoted by the IEEE in the USA (1609WG 2007), and the ITS (Intelligent Transportation Systems) communications architecture which is being developed by ETSI in Europe (ETSI 2009). In all these wider standardization efforts, IEEE 802.11p is being considered as a possible (if not the only) wireless communication technology for realizing V2V and V2I links.
11.2 Vehicular Networks: User Scenarios
In contrast to other emerging short-range radio technologies for which user scenarios are often not well defined, or sometimes even emerge after the technology has been realized, in vehicular networks user scenarios and the resulting application requirements have been clearly defined in advance. In fact, one of the first tasks of the above-mentioned standardization working groups (CALM, WAVE, and ITS) was the definition of representative use cases for vehicular networks and the characterization of the resulting application requirements. These use cases have been selected considering strategic, economic, performance, legal, and organizational requirements, as well as the needs of both users and stakeholders.
For instance, the ETSI ITS working group defines four classes of applications for vehicular networks: active road safety, cooperative traffic efficiency, cooperative local services, and global Internet services. In turn, active road safety applications can be divided into two classes: cooperative awareness applications, which are based on the period exchange of status information between vehicles, and road hazard warning applications, which are instead event-driven applications triggered by the occurrence of certain, potentially dangerous, events.
In the following, we briefly describe a representative use case with corresponding requirements for each of the above-mentioned groups. Application requirements are expressed in terms of:
11.2.1 Active Safety Applications
An instance of the class of cooperative awareness active safety applications is intersection collision warning (ICW). The goal of this application is to warn drivers about a potential collision when approaching an intersection which can be regulated by traffic lights or not. The warning is delivered to the driver through some user-friendly interface, for example, a danger sign blinking on the instrument panel.
It is important to observe that in this application, and in active safety applications in general, the goal is to give the driver early warning of a possible dangerous situation; however, full responsibility for possible actions taken to avoid the dangerous situation (e.g., braking) is left to the driver. In other words, active safety applications are not designed to replace the driver, but to assist her/him in improving road safety conditions. This is achieved by extending a driver's situation-awareness beyond the human eye, which is enabled by the exchange of short-range radio messages between nearby vehicles.
Intersection collision warning can be based on either V2V or V2I communications. When based on V2V communications—typically, when the intersection is not regulated by traffic lights—vehicles periodically broadcast status packets to detect each other's position, speed, direction, etc. In this case, the processing of broadcast packets from surrounding vehicles is distributively performed onboard vehicles, as well as detection of a potentially dangerous situation. When V2I communications are used instead—typically, when the intersection is regulated by traffic lights—RSUs installed at the intersection receive status messages from approaching vehicles, and elaborate these messages in order to detect dangerous conditions. If such a condition is detected, a warning message is locally broadcast in the vicinity of the intersection.
Independently of whether the application is realized through V2V or V2I communications, it is important that warning messages are delivered to the drivers early enough, so that safe deceleration of vehicles can take place, hopefully avoiding collisions at the intersection. It is also important that all approaching vehicles receive the warning in time, otherwise an even more dangerous traffic situation might actually occur. Thus, very stringent requirements on the lower layers of the network architecture are imposed by an intersection collision warning application, especially in terms of latency to access the wireless channel. These requirements, together with those of the other application described in this section, are summarized in Table 11.2.
Table 11.2 Requirements of ICW and EEBL applications
| Application | Requirement | Value |
| ICW | Min. freq. periodic msg | 10 Hz |
| Max. latency | 100 ms | |
| Max. Tx range | 300 m | |
| Digital map | Required | |
| EEBL | Min. freq. periodic msg | 10 Hz |
| Max. latency | 100 ms | |
| Max. Tx range | 300 m | |
| Digital map | Not required |
Among other cooperative awareness active safety applications, we mention emergency vehicle warning, slow-vehicle indication, and motorcycle approaching indication.
An instance of the class of road hazard warning active safety applications is emergency electronic brake lights (EEBL). The goal of this application is to locally broadcast warning messages to following vehicles whenever a vehicle brakes hard. Thus, this application can be thought of as the radio-enabled counterpart of a feature already realized in some existing vehicles, which automatically turns on the emergency lights during hard braking. Due to the exchange of radio messages, EEBL can extend the scope of the warning notification beyond human eyes, with potentially considerable benefits in terms of improved safety conditions. Similar to the ICW application, the warning is delivered to the driver through some user-friendly interface, for example, by a blinking danger sign on the instrument panel.
In contrast to ICW, EEBL typically exploits only V2V communications. However, requirements imposed by the application to the lower layers of the network architecture are similar to those imposed by ICW, especially for the low latency and high communication reliability requirements—see Table 11.2.
Among other applications, we mention wrong-way driving warning, stationary vehicle indication, traffic condition warning, road works warning, and collision risk warning.
11.2.2 Cooperative Traffic Efficiency Applications
An example of cooperative traffic efficiency applications is an enhanced route guidance and navigation application which is able to provide the driver with real-time information about traffic conditions, availability of nearby parking spots, etc. Different from existing navigation applications, which typically compute the route at the beginning of the trip and do not modify the suggested route while traveling, this “next generation” navigation application should be able to dynamically recompute the best route based on the acquired real-time traffic information.
While in principle both V2V and V2I communications can be used to realize this application, the presence of a light infrastructure—RSUs—is recommended to effectively implement real-time broadcasting of up-to-date traffic information. Also, real-time traffic information can be provided through access to external networks, for example, through a cellular network connection.
It is important to note that vehicles in this type of navigation application can be thought of as both providers and consumers of information: for instance, a vehicle might estimate travel times between selected checkpoints when traveling, and deliver these measurements to a traffic monitoring system through, for example, V2I communication with an RSU, acting in this case as information provider. On the other hand, (a driver onboard) a vehicle acts as information consumer when, for example, exploiting real-time traffic information provided by the traffic monitoring system to dynamically recompute the best route to the destination.
As other examples of cooperative traffic efficiency applications, we mention traffic light optimal speed advice, contextual speed limit notification, and limited access warning and detour notification.
11.2.3 Cooperative Local Services
An example of cooperative local service is ITS local electronic commerce: when traveling in a neighborhood, a driver might automatically receive advertisements for, say, restaurants and shops in the vicinity, electronic coupons and discounts for local services, and so on. Also, the driver might electronically purchase some goods/services in the neighborhood.
It is important to note that this type of application is perceived—at least by governments and the automotive industry—as a relatively less important application, since its is not related to road safety and traffic efficiency. Indeed, if not adequately implemented, ITS local electronic commerce applications might actually distract the driver from driving.
Other examples of applications in this class are media downloading, point of interest notification, and automatic access control and parking management.
11.2.4 Global Internet Services
This class of applications encompasses services that can be implemented only through access to the Internet. Such access can be realized either through vehicular networking technology—especially in urban scenarios where an RSU-based infrastructure is present—or through other types of networks such as cellular networks. Applications in this class include insurance and financial services, fleet management, loading zone management, vehicle software provisioning and updates, etc.
As with cooperative local services, global Internet services are also perceived as a relatively less important class of applications with respect to safety- and traffic-related applications. Further, all services in this class must be implemented in such a way that the driver is not distracted from the main task of driving.
11.3 Vehicular Networks: Perspectives
Unlike WLANs, which are nowadays a well-established and very popular wireless technology, vehicular networks are still not fully mature from a technological viewpoint: the IEEE 802.11p standard has been released only very recently, and only a few off-the-shelf 802.11p products are currently available. Most of them are still in prototypal form and relatively expensive.
Consequently, we believe the main evolution trend for vehicular networks in the near future will be a maturing of the communication and networking technology, which will hopefully require only a few years. Concurrently with technological evolution, vehicular applications will be developed and tested in the field, starting from the most compelling classes of applications such as active safety and cooperative traffic efficiency.
As for the challenges, we believe two classes will be addressed in forthcoming years. A first class is related to the very stringent requirements imposed by active safety applications on vehicular communications, which, as commented in the previous section, are very strict, especially in terms of latency and reliability of communication. Considering that vehicular networks are characterized by a high degree of mobility, a challenging radio environment, and the fact that the radio channel might saturate in the presence of high vehicle density, fulfilling these requirements will likely require a leap forward with respect to the current state of the art in communication and networking technology.
A second class of challenges is related to diffusion of the vehicular networking technology itself. While it appears credible that in the near future governments will impose the adoption of short-range vehicular technology for new vehicles through regulation (similar to what was done for seat belts, airbags, antilock braking system (ABS), etc.), there will nevertheless be a very long period of time during which the penetration rate of onboard vehicular networking technology will be very low. Just to give the reader an idea, it has been estimated that, even if all new vehicles were to be equipped with vehicular networking technology starting now, at the current market rate it would require more than 10 years to achieve a 100% penetration rate of the new technology in the USA. Thus, the applications mentioned in the previous section, and especially those related to active safety, should be implemented in an environment where short-range-radio-enabled vehicles coexist with non-equipped vehicles. The implications on safety conditions of this coexistence are not fully clear to date, and must be carefully addressed in order not to waste the enormous potential of vehicular networking technology to improve safety conditions also in this long transition phase.
11.4 Further Reading
This chapter presented only a very short description of vehicular networking technology and related issues. The reader interested in gaining a better view of this technology and related research activities is referred to the books available on this topic, among which we mention Hartenstein and Laberteaux (2010) and Emmelmann et al. (2010). A well-written and relatively short introduction to vehicular networks can be found in the first two chapters of Ribes (2010).
1609WG IS 2007 IEEE trial-use standard for wireless access in vehicular environments (WAVE). IEEE Std 1609.1/.1/.3/.4.
204IT 2011 CALM. http://www.iso.org/iso/iso_technical_committee?commid=54706.
Commission E 2004 Energy and transport. Report 2000-2004. Official Publications of the European Communities KO-59-04-629-EN-C.
Emmelmann M, Bochow B and Kellum C 2010 Vehicular Networking: Automotive Applications and Beyond. John Wiley & Sons, Ltd, Chichester.
ETSI 2009 Intelligent Transportation Systems (ITS); Communications; Architecture. ETSI TS 102 665 V0.0.9.
Hartenstein H and Laberteaux K 2010 VANET Vehicular Applications and Inter-Networking Technologies. John Wiley & Sons, Ltd, Chichester.
Organization WH 2009 Global Status Report of Road Safety: Time for Action. WHO, Geneva.
Ribes M 2010 Adaptive communication protocols for cooperative vehicular systems. PhD Thesis, University Miguel Hernández of Elche.
World Health Organization 2008 World health statistics 2008. WHO Library Cataloguing-in-Publication Data.