4
Remote sensing technologies for measuring offshore wind
Abstract
Measuring wind conditions offshore can provide information that can considerably reduce the costs of offshore wind farms. It is also important to verify the power performance of the offshore wind turbines and this in particular requires accurate wind speed measurements with known uncertainties. Conventional methods for measuring the wind using mast-mounted instruments become much more costly and logistically challenging as water depths increase. Remote sensing methods are becoming increasingly able to substitute conventional measuring techniques. For wind prospecting and model validation, satellite-borne remote sensing methods are highly valuable. Synthetic aperture radars can provide relatively high resolution (ie, 1 km) and can also provide wind speeds in coastal areas. Scatterometers cover much larger areas and have correspondingly lower spatial resolution (ie, 12–25 km). Unlike synthetic aperture radars, they are able to provide both speed and direction data. Surface-based remote sensing methods offshore are mostly based on lidar technology, although some radar systems are also being introduced. Lidars measure line-of-sight wind speeds by determining the Doppler shift of coherent laser light backscattered from suspended aerosols. Wind lidars can measure accurate wind speeds up to heights relevant for wind energy. Offshore they must be placed on an existing structure (ie, mast or platform) or they can be deployed on dedicated buoys. Floating lidar systems are becoming commercially available and are able to measure mean wind speeds to a surprising accuracy. Scanning lidars placed onshore can measure the wind resource in coastal regions out to a range of about 10 km. Lidars deployed on the nacelle of wind turbines or placed on their transition piece can be used to measure reference wind speeds for power curve and load verifications.
Keywords
Lidar; Power curve verification; Resource assessment; SAR; Scatterometer; Wind speed4.1. Introduction
4.1.1. The need for data
Offshore wind farm development is to high degree dependent upon reliable information on wind conditions. The revenue of a wind farm is proportional to the annual energy production (AEP). All other issues around a wind farm reduce the revenue, such as capital expenses (CAPEX), operational expenses (OPEX), installation cost, feasibility and decommissioning. The AEP is proportional to the square of the wind speed. Thus, even relatively small uncertainty on the wind speed increases considerably the uncertainty on the AEP. Wind farm development offshore typically is planned at a large scale with hundreds of MW to GW installed capacity in one wind farm, or clusters of large wind farms. The wind resource at a site is key information for wind farm planning. Also, the wind variability at a daily, seasonal and interannual timescale and extreme winds such the 50-year return values of 10-min values and 3-s gusts are important. At shorter timescales, wind variability from seconds to minutes for control and operation of the wind turbines and wind farm operation (ie, clusters operation) for the balancing of power, needs to be assessed.
Ideally, winds near wind turbine hub-height observed over several years and resolved at 10-min resolution are ideal for wind resource estimation. Unfortunately, the cost of meteorological wind observations offshore is very high and therefore there is scarcity of data. In addition, the measurements performed by private companies are not shared publically as the competitive benefit of detailed knowledge on offshore atmospheric conditions is valuable for further wind farm development. The key parameters of relevance include 10-min wind speed and direction; wind resource; extreme winds 10-min and 3-s gusts maximum values during 50 years (ie, the design wind speed); daily, seasonal and interannual variability; and the ‘quality of the wind’, ie, the short-term variability and its predictability. Finally, the atmospheric turbulence is part of design criteria and also needs to be considered for selection of the wind turbine for a given wind climate. Wind turbine wake effects are of utmost importance when deciding on the layout of a wind farm. The added turbulence from operating wind turbines increases the load on wind turbines located further downstream, thus not only is it necessary to consider the potential wake loss, ie, the reduced AEP due to wind turbine wake effects, but also to evaluate the potential load and additional cost if turbines need more service and repair when located in conditions of higher turbulence.
Atmospheric modelling of offshore wind conditions is advanced. Mesoscale modelling provides the state of the art in offshore wind resource mapping but all model results need verification to be trusted because there is an immense selection of choices in the modelling regarding input data, planetary boundary-layer schemes, among other issues (Hahmann et al., 2014). As mentioned above, the cost of measuring is high, yet the cost of not measuring will result in high uncertainty on AEP, which will typically increase the cost of financial capital and also limit the possibility of optimal planning of, for example, layout.
4.1.2. The offshore reality
When the world's first offshore wind farm at Vindeby in Denmark was taken into operation, many said that ‘it isn't really offshore’! At the time, to us doing the measurements there, it felt rather offshore, but in retrospect and after visits to modern wind farms such as Horns Rev I and II, there is both offshore and really offshore! Our point here is that from both wind modelling and measurement perspective, there is a range of offshore site types that we need to address.
Many wind turbines have been built on or very close to docks and harbours, often with a fetch that is predominantly open water. Resource measurements will clearly have been performed from dry land. Whilst it is usually possible to enter the turbine ‘with dry feet’, reference wind measurements (eg, for the power performance verification) will need to measure the wind speed some hundreds of metres out in the water. Already this requires ‘offshore’ methods and equipment.
Vindeby was actually between 1.5 and 3 km from the Lolland, Denmark coast, and with water depths between 2 and 6 m. Even at these modest distances, the wind resource is significantly different to the adjacent coast wind resource and, due to the quite strong land–sea gradients, quite difficult to model accurately. Wind turbine measurements required a local reference which was provided by two free-standing (ie, non-guyed) met masts mounted on monopoles driven into the sea bed. We were soon aware that the mast erection and operation represented an order of magnitude increase in both cost and logistical difficulties compared to onshore operations. In particular, we experienced (ie, at Vindeby and other early offshore masts) severe problems with mast access, salt-induced corrosion, failing autonomous power supplies and seabird fouling. Whilst much more professional solutions to all these issues are now common practice, all remain as serious challenges to robust offshore measurements.
Modern offshore wind farms are orders of magnitude larger than Vindeby, often 20–30 km from the coast and in water depths up to 20–40 m. Here conventional (ie, mast-mounted) measuring methods are at their limit since mast costs are very high (ie, in millions of Euro).
Remote sensing of wind speed comes in two very different forms – surface (ie, buoy or wind turbine)-based measurements utilising the backscatter from wind-borne aerosols and space-borne (ie, satellite) measurements utilising the backscatter from capillary waves. We will present the theoretical basis for each type in Sections 4.3 and 4.4, respectively. To set this in perspective, however, we will start out with a brief introduction to conventional measurement techniques in Section 4.2.
At all offshore sites, surface-based remote sensing methods can play a major role in reducing the uncertainty of wind resource estimates as well as providing a traceable reference wind speed measurement for power performance verification once the wind farm is operational. At distances of a few kilometres from the coast, space-borne remote sensing can be used for resource estimation although with somewhat higher uncertainty than surface-based methods. As a case study in Section 4.5, we will describe how the development, construction and verification of a hypothetical, so-called ‘near-coastal’ wind farm (ie, 8–12 km from the coast) can be aided by both remote sensing technologies. At this distance from the coast, all conceivable techniques can actually be used. The chapter will close with some ideas about future trends within the field of offshore resource assessment and some useful sources of additional information.
4.2. Conventional methods
By far the most accepted and (formally at least) most accurate wind measurements are those performed using cup anemometers and wind vanes mounted on masts. These are generally referred to as ‘conventional methods’ in contrast to ‘remote sensing methods’ that are the main focus of this chapter.
4.2.1. Cup anemometers
A cup anemometer is seemingly a much-studied and well-understood instrument (Kristensen, 1993). The principle is reasonably simple; the three open, hemispherical cups each placed at the end of an arm from a common axle have a higher drag moving downwind than upstream, this inducing a rotation of the axle. The speed of rotation is, to a high degree, directly proportional to the wind speed, although with a significant starting speed. Attached to the axle, in the body of the cup, is some form of transducer to enable the speed to be measured. In good-quality cups this is a magnetic (reed or hall-effect) or opto-electronic pulse generator, typically producing between 2 and 40 pulses per revolution. The rotational speed is determined either by timing between successive pulses, often reduced to one per revolution to eliminate the effects of asymmetry, or by counting pulses over a given period, typically 10 min. Pulse counting provides an excellent mean value but no information concerning the standard deviation (ie, the turbulence intensity) or extreme values (ie, gusts and lulls) and for these reasons is not employed in modern data loggers. To determine the constant of proportionality, between the cup's rotational speed and the wind speed, and its starting speed (ie, offset), a cup anemometer is calibrated in a wind tunnel before, and sometimes after, use in the field.
In the field, or in our case, above the ocean, the cup anemometer is mounted on a mast at the required measuring height either on a side-mounted boom or from a top-pole. The presence of the mast and to a lesser extent the presence of the boom or pole gives rise to a distortion (ie, acceleration or deceleration and change of direction) of the flow we are trying to measure. Clearly the magnitude of the distortion will depend on the distance from the distorting bodies as determined by the boom length and the centre height of the instrument above the boom. The IEC 61400-12-1 standard provides recommendations for minimum distances for boom lengths and instrument centre-height distances together with top-pole geometry. A mast following these recommendations and with a Class 1 cup is termed ‘IEC compliant’ but this does not mean that there is no measurement error from the distortion. Unfortunately the standard is rather vague about the size of the ‘mounting’ uncertainty that should be added to account for these effects. Typically 1% is added for a side-mounted (ie, IEC-compliant) cup anemometer and between 0% and 0.5% for a top-mounted instrument.
4.2.2. Wind vanes
Traditional wind direction measurements are performed using the well-known wind vane. This consists of a vertical flat plate fixed to an arm that is free to pivot about a vertical axis. Both the drag and lift forces act on the plate to keep it aligned to the wind direction. Wind direction can then be determined by measuring the angular position of the axle. This is typically accomplished using a potentiometer but wind vanes using some form of optical or magnetic encoder may also be encountered. Potentiometer wind vanes often have a ‘dead-band’ of a few degrees so that wind direction at their nominal north direction can be determined poorly or not at all.
Certainly the largest uncertainty in wind direction measurement is associated with the alignment of the instrument to a known direction at installation. Depending on the skill of the technician, this uncertainty can range from a fraction of a degree to 5 or even 10 degrees. Moreover it is not uncommon to see wind vanes mounted with a gross 180 degree error. Offshore, the only reference can often be the boom the instrument is mounted on. Even if this alignment is well performed, accurate boom direction determination is not a trivial task offshore where magnetic compass measurements are significantly distorted by the iron of the mast.
Once deployed, aligned and in operation, further errors can arise if the mechanical structure (the plate or the arm) becomes deformed. For this reason (and others) it is highly recommended to have good redundancy of wind direction measurements. Never install less than two and preferably three vanes on one mast and pay close attention to alignment and orientation issues.
4.3. Surface-based remote sensing
As we discussed in Section 4.1, modern surface-based remote sensing techniques can both complement conventional measurements and replace them when their costs and logistics become more favourable, especially as water depths increase. In this section we will present the underlying measurement principles and describe the technologies that have particular relevance for offshore wind energy. Throughout this section, we address surface-based remote sensing techniques, primarily lidars. To the best of our knowledge, sodars have been used very little anywhere offshore for operational measurements. This is probably because support structure, wind noise and wave noise cause significant interference. Often the capital cost of the sensor is rather low in comparison to the cost of the supporting structure. In such cases, it makes more sense to use more accurate lidar systems that only marginally increase costs.
4.3.1. Basic principles
4.3.1.1. The idea in a nutshell
When using remote sensing (the ‘surface-based’ prefix is implicit in the remainder of this section) to measure the wind speed, radiation (sound, light or microwave) is emitted in a known direction. A very small part of the radiation gets reflected from something (we will see what later) that is assumed to be entrained in the wind. The backscattered radiation is Doppler shifted – that is its frequency is modified because it has reflected from something that is moving. If the remote sensing instrument can detect enough of the backscattered radiation, the Doppler frequency shift FDoppler can be determined and it turns out that this is related to Vlos, the component of the wind speed in the direction of the transmitted radiation (the ‘line of sight’ direction) according to the equation:
![]() [4.1]
[4.1]
where λ is the wavelength of the emitted radiation.
To get a 2D or 3D wind vector, it is necessary to combine a number of different ‘line of sight’ speeds. Ideally we would perform measurements from multiple, dispersed systems with each of the beams crossing (at a different angle) at the point of interest. Often we make some assumptions about the homogeneity of the horizontal wind speed and this allows us instead to combine line-of-sight speeds measured from one point in different directions, which is much simpler and much cheaper. Offshore the flow homogeneity assumption is usually very well approximated. However, measurements in a wake flow cannot be considered as homogeneous and here multiple lidars may well be necessary.
4.3.1.2. How lidars measure line-of-sight wind speeds
For lidars, the backscattering medium is aerosol (dust, salt and spray) that is entrained in the wind.
Lidars for measuring wind speed use infrared laser light with a wavelength of around 1.6 μm which is chosen for a combination of good performance (small wavelength) and relative eye safety. Even though the eye is less sensitive to this wavelength than others (notably visible light), continuous exposure to a focused beam will cause damage. The design of wind lidars ensures that this can never happen through a combination of distance restrictions and exposure duration limitation (moving or pulsed beam) at any given location. As long as these conditions remain satisfied, the instruments are classified as ‘eye safe’ (laser safety Class 1) and require no special precautions.
With a wavelength of 1.6 μm, Eq. [4.1] gives us that we will experience a frequency shift of 1.25 MHz for a 1 m/s line-of-sight wind speed. This relatively tiny frequency shift can be accurately detected using the concept of coherent detection in which the backscattered light is mixed with a copy of the original, unshifted light (known as the ‘local oscillator’). As is well known from both mechanical and electrical systems, a sum of two similar frequencies results in a modulation at the difference frequency. It is this modulation frequency that is detected, by shining the mixed light onto a photodetector, since the individual component frequencies are way above the bandwidth of the sensor.
By Fourier analysis of the photodetector signal, a spectrum of the frequency shift is obtained, although for a single realisation, this is highly contaminated by optoelectronic noise. Noise suppression is achieved by averaging many spectra, using somewhere between 4000 and 15,000 realisations depending on the lidar type and conditions.
Up to this point, the description applies to all wind lidar types. We now need to split into the two main types of wind lidars; continuous wave and pulsed.
4.3.1.3. Continuous-wave lidars
As can be inferred from the name, continuous-wave lidars emit a continuous beam of laser light. In order to discriminate where (at what height) the lidar is sensing, the laser beam is accurately focused at a range corresponding to the required height. Both the intensity of the illuminating light and the efficiency of the collection of the backscattered light are maximised by focusing and the sensitivity turns out to be equal at all heights. The downside of the focusing is that the effective length of the column of air illuminated by the laser beam (the so-called ‘probe length’) increases with the square of the measuring range (it is a Lorentzian function). Whilst at short ranges the probe length can be a few centimetres, at greater heights it becomes many tens of metres, meaning that the measured line-of-sight speed is a weighted average over a large range of heights. Depending on the optical design of the lidar, the effective limit in measuring height is between 200 and 300 m.
Another problem with continuous wave lidars is that the origin of backscatter cannot be known explicitly since the Lorentzian weighting function of the focusing efficiency has infinitely long tails (the function never goes to zero). As long as the concentration of backscattering aerosols remains sensibly constant, the received backscatter can reasonably be assumed to originate from within the intended probe length. If, however, there is a drastic change in aerosol concentration at some height (eg, a mist or cloud layer), the product small (but non-zero) focusing efficiency times very high aerosol concentration can result in a significant backscatter from the level with higher aerosol concentration. Thus line-of-sight speeds from ‘wrong’ heights (and due to wind shear, wrong speeds) can make a significant or (for mist layers) even dominating influence, resulting in significant measurement errors unless detected or corrected for.
4.3.1.4. Pulsed lidars and some contrasts to continuous-wave systems
A different approach to sensing height discrimination is to send the light out as discrete pulses instead of as a continuous beam. If the acquisition of the backscattered light is accurately timed and synchronised to the pulse emission, the arrival time of the backscatter will determine where (ie, what range) it has come from since this is only a function of the speed of light and the return distance. In practice, since the laser pulse has a finite duration (rather than being an instantaneous flash) we actually only know the lower and upper limits on the range from which the backscatter originates, this concept being known as ‘range-gating’. We also know that the highest proportion of the light comes from the centre of the range, tailing off approximately linearly towards the lower and upper limits (triangular weighting). Importantly we know that all the received backscatter (for a given range-gate) must be from within these limits. Unlike the focused, continuous-wave lidars, there are no cloud or mist issues.
Since the emitted light pulse propagates steadily out from the lidar, the line-of-sight wind speed from many different ranges can be determined essentially simultaneously. This is achieved by continuously acquiring the backscattered light and then from this time series, choosing the period that corresponds to each required range. For each pulse, each time slice is Fourier transformed. To achieve the necessary noise suppression, many pulses are transmitted in quick succession (eg, 10,000 at a 20-kHz pulse repetition frequency) and the power spectra for each range are ensemble averaged.
Like the continuous-wave lidar, there is also a limit to the effective range of a pulsed lidar but the reason is different and this well illustrates the difference between the two concepts. Unlike the strongly focused continuous-wave laser beam (where the focus determines the sensing range), a pulsed lidar has an almost collimated beam and there is no focusing of the backscattered signal. As a consequence, the strength of the backscattered light obeys a classic 1/R2 decay (for the focused, continuous wave system this was constant) and, depending on the lidar design and the aerosol concentration, at some range, the signal will be too weak to determine reliably the Doppler frequency. The probe length of the pulsed lidar (given by approximately half the physical length of the laser pulse) remains constant at all heights whereas we recall that for the continuous-wave systems the probe length increased as a function of R2.
It is fairly intuitive that pulsed lidars cannot measure at ranges lower than their pulse length (40 m minimum height is typical for a wind lidar). At short range, continuous-wave, focused systems excel since here the R2 probe length dependency works in their favour. Conversely at long range, pulsed systems are, for the same reason, the only real choice. In conditions with low aerosol concentration, continuous-wave lidars have the advantage that they are concentrating their optical power at one height only and may well have a better availability (proportion of time when valid speeds can be measured). In conditions with high aerosol concentration variability (clouds and mist), continuous-wave lidars may have particular difficulties in measuring accurately.
4.3.1.5. Direct detection lidars
A fundamentally different approach to measuring the wind speed is adopted by the so-called ‘direct detection’ lidars. Direct detection systems measure only the intensity of the backscattered light and do not attempt to measure the Doppler frequency shift and hence the line-of-sight speed. Instead, the patterns of aerosol measured sequentially along inclined beams in different directions are compared to one another using correlation techniques. The idea here is that a pattern of aerosol concentration variation will remain more or less constant as a patch of wind passes above the lidar, first crossing one beam and later, crossing another. When a pattern that has been observed on one beam can later be identified on another, the time between the matches gives the wind speed and the relative position of the two beams gives the wind direction.
Direct detection systems require less components and also less high-tolerance components (eg, the laser wavelength stability is much less critical) than coherent detection systems. This makes them considerably less expensive. Another advantage is that speed is measured directly without the need for reconstruction algorithms based on homogeneity assumptions. Although not relevant to offshore measurements, this means that direct detection systems can measure accurately in situations where the flow is not homogeneous, most notably in complex terrain. Available data indicate that direct detection systems measure on average a reasonably accurate mean speed, although compared to a Doppler wind lidar, the noise (scatter) will be somewhat higher.
4.3.2. Wind lidars
Lidars used to measure the profile of wind speed for wind resource and power performance verification are called ‘wind lidars’. These devices can typically measure up to a height of 250–300 m. They are placed on or close to the ground (offshore on a tower base or on a buoy), shooting beams of infrared light inclined by typically 30 degree from the vertical, in a number of different azimuthal directions. Wind lidars are reliant on the assumption that the horizontal wind speed is homogeneous over the area described by the beams at any given height. In this case, the line-of-sight wind speeds from the different directions can be assumed to be different projections of the same horizontal wind speed vector and, in this way, both the speed and the direction can be determined (‘reconstructed’).
Wind lidars have been commercially available since 2006. The early versions were rather unreliable even on land and it is only in the last 3–4 years that dedicated marine versions, suitable for offshore use, have become available. Offshore ‘hardening’ typically includes enhanced sealing specification, absence of external cables and connectors, corrosion protection and the provision of bird spikes to prevent seabird fouling. It is also important that the lidar is provided with a robust data communication system with the possibility of GSM or satellite services as appropriate at the deployment site. At the time of writing, the offshore market is dominated by two wind lidar products; the ZephiR 300 and the Leosphere Windcube. We will briefly describe these two lidars.
4.3.2.1. ZephiR 300
The ZephiR was the very first wind lidar on the market, originally developed by the UK company QinetiQ. It is the only commercially available continuous-wave wind lidar. Since the introduction of the original ZephiR, it has undergone a major revision to improve its reliability and ease of installation and in this version, is known as the ZephiR 300. It is available in a dedicated offshore version for both fixed and floating platforms.
The continuous laser beam is shone through a continuously rotating prism, deflecting the beam about 30 degree from the vertical so that the beam describes the surface of a cone, completing one full revolution per second. With the beam focused at the height of interest, 50 line-of-sight wind speed measurements are performed every second. Homodyne coherent detection is used by the ZephiR, meaning that the backscattered light is mixed with a copy of the unmodified laser source (the local oscillator). A consequence of this is that the polarity of the frequency shift and hence also the polarity of the line-of-sight wind speed cannot be recovered, only its magnitude. For this reason, the line-of-sight speeds, as a function of azimuth angle, describe a rectified sine wave with the two peaks being the upwind and downwind directions but with no direct means of knowing which is which. In order to resolve this ambiguity, the wind direction is sensed on the instrument itself and the peak closest to the measured direction is identified as upstream. Accordingly, it is important that the lidar (or its local wind sensor) is placed where it is well exposed to the wind (eg, not inside a mast or container) otherwise the wind direction accuracy may be impaired.
Wind measurements are made at each of the required heights sequentially, with subsecond delays for focusing between the different heights. A sequence of up to 10 heights may be interrogated. In order to provide a basis for its cloud correction and mist detection algorithms, two additional heights (very high and very low) are added to the sequence.
4.3.2.2. Leosphere Windcube V2
The other dominating wind lidar is the Leosphere Windcube. This was introduced to the market one year after the ZephiR in 2007. As with the ZephiR, it too has undergone a major industrialisation and is now available as the Windcube V2, also with a dedicated offshore version. The Windcube is a pulsed lidar. It has five discrete beam directions (lines of sight), four inclined 30 degree from the vertical and pointing north, east, south and west, and a fifth, vertical beam. Each beam direction has its own fixed telescope and a single laser source and the detector is switched optically between the five directions, shooting around 10,000 pulses (in about 0.5 s) before switching to the next direction.
Heterodyne coherent detection is used in the Leosphere, meaning that the laser source is shifted in frequency (by about half the total frequency shift range) before being emitted. The backscattered light is mixed with a copy of the unshifted laser source and in this way, the polarity of the frequency shift and hence the polarity of the line-of-sight wind speed can be determined together with its magnitude. Horizontal wind speed and direction are reconstructed under the assumption of horizontal homogeneity, using the four most recent non-vertical radial speeds. This provides a data rate of around 1/s. Wind speeds at up to 10 different heights can be obtained simultaneously. The Windcube V2 can measure speeds from heights of 40 m and above with an imposed maximum height of 300 m, which can only be reached under reasonably favourable aerosol conditions.
4.3.2.3. The accuracy of wind lidar measurements
Both for resource assessment and for power curve verification, wind lidar data will not be of much value unless their accuracy can be determined – that is, we are able to assign an uncertainty to the measurements with respect to the international standards. Many, particularly physicists, find it provocative that a wind lidar should be calibrated, since a lidar is (in some ways) an ‘absolute’ instrument, meaning that its output (unlike a cup anemometer for instance) can be determined from first principles if we know the specifications of its components. Whilst this is true for the measurement result, it is much more difficult to achieve for the measurement uncertainty since each component would itself require an accredited calibration. There remains also the problem of ascertaining that the software algorithms are correct and have been applied correctly.
Wind tunnel calibrations of wind lidars under controlled conditions are not possible due to the large dimensions of the measuring volumes and the need to calibrate at the correct ranges (this being an important part of the accuracy). In practice, wind lidar uncertainty is currently determined by performing an open-air calibration against reference cup anemometers mounted on a met mast (Gotschall et al., 2012). This is far from ideal since, for good-quality wind lidars, the reference cup anemometer uncertainty dominates the uncertainty budget and the lidar uncertainty can of course never be better than this. Either there is a need for a better reference instrument or, alternatively, a radical improvement in cup anemometer uncertainty through more careful design and better understanding of (and correction for) the effects of turbulence, temperature and flow tilting.
A calibration procedure for ground-based remote sensing instruments has been laid out in the upcoming revision of the important IEC 61400-12-1 wind turbine power performance testing standard (Annex L). This document also describes a classification scheme, similar to that for cup anemometers, which attempts to assign an uncertainty due to the variation of environmental variables between the calibration site and the application site. However, application of this scheme has not yet produced convincingly consistent results (Albers et al., 2012) and it remains unclear if and how the sensitivity of the reference instrumentation can be accounted for in this scheme.
4.3.2.4. How wind lidars measure turbulence and gusts
Good wind lidars can measure quite accurate mean wind speeds when deployed at sites where the assumption of horizontal homogeneity of the wind is reasonably fulfilled as it should be at most offshore sites. In contrast, even when the mean speed is very well captured, a wind lidar's ability to measure turbulence (here meaning the standard deviation of the horizontal wind speed) is remarkably poor. More specifically, a scatter plot of standard deviations of 10 min standard deviations of the lidar wind speed plotted against those from a colocated and synchronised cup anemometer will show considerable scatter and the slope of a regression line can vary between 0.8 and 1.2.
As described in Sathe et al. (2011), there are several reasons for this poor performance. Part of the explanation is the large probe length of the lidar which has the consequence that turbulence structures significantly smaller than this size cannot be ‘seen’ by the lidar and the turbulent energy associated from these scales will be attenuated. The magnitude of the attenuation will depend both on the probe length (a function of height for a CW lidar, fixed for a pulsed lidar) and the scale of the turbulence (a function of surface roughness, height and atmospheric stability).
A further complication, that to some extent counteracts the probe length attenuation, comes from the inclination of the lidar beams. Put very simply, the different turbulence components cannot be completely separated – they cross-contaminate one another. For example, the variation of radial speed measured by an inclined lidar beam will come from both the horizontal variation (probably the one we are most interested in) and vertical velocity variations. With the beam geometry of existing wind lidars, it is actually impossible completely to separate the components (and the cross-components) of turbulence. To do this, formally we would need at least six beams with at least two different opening angles.
Summing up, there is both probe length attenuation and turbulence component cross-contamination. The actual standard deviation we measure compared, for example, to a cup anemometer measurement will depend on the type of lidar, the measuring height, the surface roughness and, not least, the atmospheric stability. The combination of all these effects can be modelled (Sathe et al., 2011) and the results agree reasonably well with the experimental observations. This gives some hope that at least the uncertainty of lidar turbulence measurements can better be established and if we know a little more about the conditions (eg, temperature gradient) than the lidar can tell us, the possibility to make some form of approximate correction.
Having seen the problems that wind lidars have measuring turbulence, we cannot expect them either to be particularly well suited to measuring gusts (although extreme 10 min mean speeds are accurate). Lidar gust measurement is not particularly well researched but some preliminary results confirm these suspicions. It would not be good practice to base extrapolation to 50-year gust values on the 3-s gust measurements performed with a wind lidar. A particular problem arises with a CW lidar measuring at multiple heights since in this configuration the lidar will measure at each height with a quite low duty factor (eg, slightly less than 20% for five configured heights). Here statistically, the probability of measuring during the occurrence of the maximum speed is directly related to the duty factor.
4.3.2.5. Deploying wind lidars offshore
One of the great virtues of wind lidars onshore is that they can be deployed easily and discreetly almost anywhere. Offshore this is clearly not the case since, unless we make them so (see Floating lidars, Section 4.3.3), they are not buoyant! In this section, we will address the possibilities for, and problems with, deploying lidars on fixed offshore platforms.
Wind lidars can be deployed in conjunction with an existing or planned offshore mast. The footprint of a wind lidar is usually no more than about 1 m2 and the weight around 50 kg. It is therefore feasible to build a small lidar ‘balcony’ on the side of the mast, high enough to avoid extreme waves. Another possibility is to place the lidar inside the mast itself if there is sufficient room. With deployments of this type it is important that the beam directions are not blocked by the mast. In the case of the ZephiR, some obfuscation will unavoidably occur (since the beam describes a complete circle) and a centre mounting (with a few dispersed blocked beam directions) is preferable to a side mounting with one dominating blocked sector. However, in this case, care should be taken that the instrument's local wind sensor is sufficiently exposed to be able to measure a reliable wind direction.
The greatest challenge to a lidar deployment on an isolated offshore mast is the need to provide between 50 and 100 W of continuous power to the instrument. Whilst an autonomous power system is a possibility (eg, a combination of photovoltaics and wind), it greatly adds to the logistical complexity and is unlikely to be highly reliable. A diesel generator can also be the power solution (or part of it) but, again, the engineering and logistics are non-trivial. In practice, a mast-deployed lidar is probably best suited to a mast in or close to an existing wind farm where electrical power can be provided by a subsea cable. Here the lidar would permit the mast to be shorter than otherwise and provide wind profiles to well above the upper rotor tip height.
A dedicated lidar platform could also be considered, for example, a monopole driven into the sea bed with a small platform for a lidar and its power supply. It is unclear whether such a solution would be significantly less expensive than a traditional offshore mast (most of the cost lies in installing and removing the monopole) and in any case, we would advocate adding a modest mast (20–40 m) in order to obtain reliable wind turbulence and atmospheric stability data.
Wind lidars can also be deployed on structures that are already present in the ocean, such as gas and oil platforms. This idea has been thoroughly investigated in the NorseWind project (Hasager et al., 2013) where a number of lidars (ZephiRs and Windcubes) were placed on platforms in the North and Irish Seas. Whilst the project's researchers were initially sceptical about the quality of wind measurements over such bluff bodies, extensive numerical and wind tunnel modelling showed conclusively that our fears were groundless. It turned out that at a height equivalent to one platform height above the platform, the flow distortion was minimal. Wind lidars placed on oil and gas platforms can measure useful wind data, particularly if this will be used for comparisons with mesoscale model predictions at heights well above 100 m. On the other hand, the wind shear down to the surface obviously cannot be measured accurately from a platform-mounted lidar. Logistically such platforms present very different challenges to those of masts. Here power and data communications are usually readily available. The main difficulty can be obtaining permission from the platform owners and complying with the very strict platform safety regulations, often aimed at mitigating the risks of fire and explosion.
4.3.3. Floating lidars
In many cases, offshore wind projects will be planned in areas where there are no existing platforms and, increasingly, in water depths that effectively prohibit the possibility of a monopole-based met mast. A floating lidar can then be a good solution and there already exist a number of viable systems to fulfil this role. In the author's opinion, this is the most exciting and boundary-breaking application we have seen of lidar technology in the wind industry, since floating lidars can provide good-quality wind and profile measurements at locations where this was never before possible. This is also an area under rapid development so we will attempt to give a general overview in this section rather than concentrating on specific systems.
4.3.3.1. What a floating lidar system is made of
It is a highly challenging engineering task to put a lidar on a buoy, provide it with power and a communications systems, deploy and recover it successfully, and expect it to work with little or no maintenance for months at a time. Not that many years ago, it was quite common for (onshore) wind lidars to be ‘dead on arrival’ – not having survived the rigours of the transport. That wind lidars now can be built to survive severe offshore service conditions is testimony to the professional industrialisation that has occurred in the past few years.
The ‘floater’ has to be suitable for the wave conditions, water depths and tidal range at the measuring location. Another important aspect is how stable a platform is desired for the lidar (we will examine this aspect more closely in the following section). Choices range between a spar buoy (a tall, highly buoyant buoy that sits upright in the water and tethered to the sea bed), a wave-riding buoy (these can be both rectangular and circular) and hulls (boat-like buoys). Spar buoys are the most difficult and expensive to deploy since generally they will be towed horizontally before being partially flooded on site to turn them to their operational, vertical configuration. Other buoy types are either towed or deployed from the deck of a vessel.
Several different lidar types have been deployed on buoys, notably special versions of both the ZephiR and Windcube, together with the OADS Vindicator (a three simultaneous beam, pulsed lidar). Apart from high-grade marine protection, these lidars usually include motion sensors, including tilt and roll inclinometers and accelerometers for measuring heave and possibly also surge and sway. These inputs can be used to correct the lidar output for the effects of tilting and motion.
A robust power supply is required. Apart from the lidar, the communication system and possibly also navigation beacons have to be powered, often amounting to around 100 W or more in total. All floating systems rely heavily on a combination of photovoltaic and small wind power systems, and in some cases, backed-up by a diesel generator.
Lastly, the lidar must have a good communication system to allow regular transfer of the recorded data and also some provision for monitoring the power system. It is common to use a satellite-based service for this duty. High reliability is absolutely essential since communication system failure will trigger an expensive service visit, even if the fault is trivial.
4.3.3.2. Different ways of dealing with the motion
As we have already indicated, the orientation and motion of the buoy can have a deleterious effect on the accuracy of the lidar. Here we will examine this issue a little more closely and explore ways of mitigating the errors.
Static tilting, caused, for example, by tide or wind acting on one side of the buoy, is probably the most important condition to avoid or correct for to avoid biasing the mean wind speed. Tilting of the lidar will have two effects: Firstly the angle with which the horizontal wind speed is assumed to be projected onto the inclined lidar beam will be wrong (unless corrected for). Secondly, the height above the water surface at which the lidar senses will also be wrong and through the wind shear, the speed will also be wrong. The first error source is straightforward to correct for (in the lidar's processing algorithm) if the angle is known from the on-board inclinometer. The second error can be dealt with quite easily by a pulsed lidar by dynamically adapting the range (moving the range-gate slightly in the sampled data). A focused lidar would need a dynamically adapted focus to achieve the same end. A simple means of mitigation adopted by some floating lidar systems is to mount the lidar in a gimbal (like a ships compass) and let gravity remove any static roll or tilt.
Dynamic motion is more difficult to correct for but has less impact on the accuracy of the (10 min) mean speed (Gotschall et al., 2014). The effects of tilting (and rolling) must still be considered (wrong projection angle and wrong sensing height) but to this we must add the induced velocities arising from the floater's motion. All these effects must be considered in respect of the dynamics of the reconstruction scheme and algorithm. For example, consider the (simplified) case where the lidar beam is scanning in opposite azimuthal directions and, due to the wave motion, the floater is heaving up and down. If the timing of the floater motion is such that the floater is moving up (or down) when both directions are being scanned, there will be no induced error in the horizontal speed (since homogeneity is satisfied) and the motion will appear as a vertical wind speed component. On the other hand, if the floater moves up whilst the beam is scanning in the first direction and down when the beam is scanning in the opposite direction, there will be an error on the horizontal wind speed (since homogeneity is no longer satisfied) and no vertical wind speed component will be reported.
Summing up, both the static and dynamic motions of the platform will have an effect on the accuracy of the wind speed reported by the lidar. However, since the flow above the ocean will usually be highly homogeneous (horizontally), if we are able accurately to measure the motion of the floater, it is, in principle, possible to correct for most of the effects. For this reason, lidar versions intended for floating service will often be equipped with accurate inclinometers and accelerometers. Often the lidar algorithm will directly correct the speed, using the inputs from the motion sensors in real time.
4.3.3.3. What floating lidars are good at and not so good at
As we implied in the previous section, it turns out that floating lidars are able to measure reasonably accurate horizontal wind speeds so long as any static deflection is accounted for (either mechanically or by software correction). On the other hand it is very likely that the motion of the lidar – determined by the floater type, the wind and sea conditions and the extent of mechanical stabilisation – will have an influence on the accuracy. One likely approach here is to use the concept of classification (see Section 4.3.2.3) to cover also the uncertainties added by the motion.
Wind direction is also important to measure accurately since the prevailing wind directions will heavily influence the layout of a planned wind farm. Onshore wind lidars can actually measure accurate wind directions (and veer) because they are easy and accurate to align (in contrast to a wind vane). Floating lidars stand on a platform that turns (yaws) and it is therefore necessary continuously to measure the floater (or lidar) heading so that the true wind direction can be determined accurately. Early systems used magnetic compasses for the necessary heading measurement – with rather poor results. A distributed GPS system (with two or more antennae on the floater) has proven to give much more accurate results.
As we saw in Section 4.3.2.4, onshore wind lidars are not good at measuring turbulence. In this respect (turbulence, not mean speed), floating lidars are even worse! The residual uncorrected effects of the motion do not significantly bias the mean, they add noise to the speed signal which is interpreted as ‘extra’ turbulence. As yet, turbulence (and extreme speed) measurements from floating lidars are not of sufficient quality to be used for design purposes. If turbulence is of particular importance, the ‘least bad’ option would be to use a spar buoy to provide as stable a base as possible.
4.3.4. Scanning lidars and radars
So far we have considered wind lidars that have fixed scanning geometries and are used either from a fixed or floating base, to measure a profile of wind speed and wind direction. Scanning lidars have instead a steering arrangement for the beam so that either a range of different trajectories can be executed or the beam can be controlled more or less arbitrarily (restricted by the dynamic constraints of the steering mechanism). Although continuous-wave scanning lidars are available for short-range (max 250 m) applications (eg, scanning inflow and wake flow within 2D), the relevant scanning lidars for offshore wind energy are pulsed systems since these are far better suited to measuring at long ranges. Due to the added complication of the scanner mechanism, scanning lidars will usually be larger, heavier, more expensive and probably less reliable than wind lidars.
4.3.4.1. What single scanning lidars can be used for
Scanning lidars can be used in the same way as wind lidars to measure the profile of horizontal wind speed and direction by shooting inclined beams in various azimuthal directions (this is known as VAD scanning or Doppler beam swinging). Due to the time needed to reposition the lidar's optics, scanning lidars will be slightly slower at completing a VAD cycle than dedicated wind lidars.
A more useful scanning method that can be performed by scanning lidars is known as ‘sector scanning’. Here, the beam is swept over a range of azimuth angles, keeping the elevation angle of the beam constant. By once more assuming homogeneity of the horizontal wind speed over this arc, the line-of-sight wind speeds measured in the different azimuthal directions will be different projections of the same horizontal wind speed. A plot of line-of-sight wind speed versus scanning direction will therefore approximate to a portion of a sine wave where the amplitude relates to the magnitude of the wind speed (multiplied by the cosine of the elevation angle) and the phase will indicate the wind direction.
There are two ‘offshore’ applications for sector scanning: Firstly, for power performance verification, a scanning lidar placed on the transition piece of a wind turbine can measure the wind speed upstream of the rotor (normally a distance corresponding to 2½ rotor diameters) using a sector scanning trajectory (Wagner et al., 2015). This has been shown to have an uncertainty similar to traditional mast-based anemometry and, of course, obviates the need for an offshore mast.
The second ‘offshore’ application is perhaps more strictly ‘coastal’. A sector scanning lidar can be placed on a shoreline (preferably elevated to a height approximating hub-height) and measure the wind offshore, out to a range of 8–15 km, depending on the specifications of the lidar. This method can be used for ‘near-coastal’ wind farms and again, the advantage is accurate wind data, without the cost of an offshore mast and with the added possibility of measuring over an area rather than at just one point.
4.3.4.2. Measuring using dual Doppler
All the lidar applications we have so far examined, both for wind lidars and for scanning lidars, have all been for solo lidars. Since a lidar can only measure the line-of-sight wind speed (the component along the direction in which it is looking), in order to be able to derive the horizontal wind speed and direction (or maybe even a complete 3D wind vector), we need to measure in different directions so that we have a sufficient number of different projections of the actual 2D (or 3D) wind field. Since we are measuring from a single point, we are assuming that the wind fields sensed by the lidar beam in the different directions (and therefore different locations) are identical. Often, especially offshore, this is a very reasonable assumption, at least over the (in wind energy) commonly used 10 min averaging period. For a wind lidar sensing undisturbed wind in a 100- to 200-m diameter circle 100–200 m above the ocean surface, this seems instinctively reasonable. For a sector scanning lidar sensing well upstream of a wind turbine, it is also probably a pretty fair assumption.
Where we have conditions with pronounced flow inhomogeneity, one lidar is insufficient – we must use two or more. Now the lidars can be spatially separated and their beams can be trained on one common point, providing colocated line-of-sight speeds that can, through simple geometry, provide the wind field at the point of intersection. To obtain a 3D wind field formally we need three different lines of sight. Offshore, it is usually impossible to place the lidars with a sufficiently large elevation angle to enable the (usually very small) vertical wind speed to be determined with any reasonable degree of accuracy. In practice, for offshore applications, the vertical component is assumed to be zero and two scanning lidars are used to obtain the horizontal wind speed and wind direction. Measurements of this type are known as ‘dual Doppler’ since two ‘Doppler’ wind speeds (line-of-sight speeds) are combined to a wind speed and direction.
Flow measurements in wind farms are a good example of where it is beneficial to use dual Doppler. Here the wake flow field is highly inhomogeneous. Whilst it is possible to measure with single lidars, the information that can be obtained is more qualitative than quantitative. For example, using a single scanning lidar, it is possible to get an estimate of the wake width but impossible to discriminate between speed and direction changes. Both lidars and X-band radars (Hirth et al., 2015) have been used for dual Doppler measurements in wind farms (the radar has not yet been used offshore but will be so in the near future). The radar is a Ka-band system originally developed for hurricane and tornado research by Texas Tech University. Onshore the systems have been deployed on dedicated pickup trucks. A coastal installation is now planned. As we have seen, lidars have narrow but quite long probe volumes (long and thin). In contrast, the Ka-band radar has a relatively broad beam (since it spreads with around 1 degree) but, by using pulse compression techniques, an effective probe length of about 10 m is achieved (short and fat). Although the range of a radar is potentially greater than that of a lidar, it is not clear how useful this will be due to the linearly increasing beam width. Neither is it clear how the availability of the radar will compare to a lidar since the radar backscattering source is not yet well understood.
Dual Doppler measurements may also be advantageous for measuring the coastal wind resource from onshore. Sector scanning (using a single lidar) from the coastline out to 10 km offshore, the arc length may well be 5 km or more. If the horizontal gradients are too large, the homogeneity assumption underlying the sector scanning methodology may prove to be unrealistic. Dual Doppler will require two spatially separated lidars operating with some form of synchronicity (this technology exists (Vasiljevic, 2014)). This can provide the wind speed and direction over a scanned area with probably slightly greater accuracy but at a much higher (more than double) cost.
4.3.5. Nacelle lidars
Power performance verification is an important part of the process of establishing a wind farm because it allows the developer to check that the performance of the turbines meets the specification of what has been paid for. This is a necessary discipline both for the economic health of the individual project and for the power performance quality of wind energy in general. Conventional power performance verification, according to the governing IEC standard 61400-12-1 uses a mast-mounted cup anemometer at hub height, to provide the incoming wind speed, the mast being a distance equivalent to between 2½ and 4 times the rotor diameter (2.5–4D) upstream of the wind turbine. As water depths increase, the cost of such a mast can be 5 or even 10 million Euros and there is clearly a potential for alternative possibilities that do not need a mast. We have already met one alternative – a scanning lidar mounted on the transition piece of the wind turbine. Here we will examine a second possibility that has already won some acceptance in the wind industry – lidars placed on the nacelle of the turbine and measuring the upstream wind speed by shooting their beams through the rotor plane. Such a lidar is known as a ‘nacelle-mounted’ lidar or simply a ‘nacelle’ lidar. It has the obvious property that, since it yaws with the wind turbine, it will always be pointing upstream.
Due to the current requirement to measure at least 2.5D upstream, nacelle lidars for power curve verification have been pulsed systems since these can measure with an acceptable range resolution at these distances. The first generation of dedicated nacelle lidars used only two beams shooting horizontally with a half-opening angle of 15 degree. Using the usual assumptions of homogeneity and zero vertical wind speed, the horizontal wind speed and the wind direction relative to the nacelle can easily be determined. However, for short timescales (seconds), the wind speed cannot reasonably be assumed to be homogeneous over the distance between the two beams (well over 100 m laterally). It turns out that the consequence of violations of the homogeneity assumption (eg, a gust on one beam and not the other) is that when the mathematical model is applied to the measured radial wind speed to calculate the horizontal wind speed (this is known as ‘reconstructing’ the wind speed), a fictive cross-wind wind component is reported (since the mathematical model can only represent the new pattern of radial speeds by a sudden direction change). The fictive cross-wind component will always act to positively bias the scalar wind speed and an error of as much as 1–2% can be experienced, depending on the turbulence intensity and the scale of the turbulence, if the mean speed is calculated from the average of the instantaneously reconstructed wind speeds. Much better practice is to calculate the mean speed from the mean radial speeds over each 10-min period. Over this period, the homogeneity assumption should be very well justified and there will be no biasing. However the calculated wind speed will be a vector average which will be marginally lower than the scalar average (again depending on the turbulence intensity) but the difference will be much smaller than the biasing of the instantaneously reconstructed speeds.
Since the main purpose is to perform power curve verification, uncertainty is paramount. A deviation from specification has to be shown to be real, that is, statistically unlikely to be the result of measurement error. For this reason a rigorous calibration scheme (Courtney, 2013) has been developed where the line-of-sight wind speeds are calibrated separately and the beam geometry (opening angle) is measured. Using the algorithm for the reconstruction of the horizontal wind speeds, the individual uncertainties can be combined to an uncertainty on the reconstructed horizontal wind speed (this is known as a ‘white box calibration’). Another important measurement parameter reported by the nacelle lidar (as we will see shortly) is the tilt angle and this has its own calibration routine based on manual detection of the beam position and accurate measurement of relative heights using a theodolite.
Using the results of the calibration procedures, a measurement procedure has been developed for two beam nacelle lidars (Wagner et al., 2013) that also accounts for the additional uncertainties associated with a nacelle mounting. As the thrust on the turbine rotor increases, the tower will bend and the nacelle (following the free end of the tower) will tilt up, lifting the beam. This is why the beam tilt angle is of such relevance since it tells us where (at which height) the wind speed is actually being sensed. By pretilting the beam a little downwards, it is often possible to keep the total range of the measuring height within the hub height ±2.5% specification of the current IEC 61400-12-1 standard. Excursions outside this range are penalised by added uncertainty. It turns out that total uncertainty of a nacelle lidar-based power curve measurement is not much higher than for a traditional mast-based measurement. This is because the lidar calibration (as usual) is dominated by the uncertainty of its reference cup anemometer and because of the rather large (2%) flow inhomogeneity uncertainty component added (rather arbitrarily) to all power curve measurements.
4.4. Space-borne RS
Ocean surface wind observations from satellite remote sensing has a long track record. The continuous series began in 1987 and currently several satellite sensors are capable of providing information. The synthetic aperture radar (SAR) provides the highest spatial resolution and covers coastal regions from around 1–2 km distance and further offshore. The methodology of wind retrieval from SAR is based on a geophysical model function developed for a scatterometer. SAR has only one antenna, thus wind direction needs to be known a priori in order to retrieve wind speed. Wind direction may be used from atmospheric modelling, from wind streaks in the scenes (with 180 degree ambiguity) or from local observations. Atmospheric wind directions are generally well modelled with sufficient accuracy for the SAR wind-retrieval algorithm. A scatterometer has three antennae (or rotational scanning antenna), thus both wind speed and wind direction can be retrieved from the observations. The spatial resolution is around 12.5–25 km, thus the near-coastal regions are not observed. The lower spatial resolution enables larger regions to be mapped in one swath as compared to SAR. Therefore the sampling rate at a specific site is much higher than for SAR. The passive microwave ocean wind speed observations have 25 km spatial resolution and observations are very frequent. Several identical sensors have been flown over many years. Thus the passive microwave ocean winds data provide the most frequent and longest series of all satellite ocean wind observations. The wind speed is retrieved but not wind direction.
Satellite-based ocean wind retrieval is based on microwaves and observes night and day. For passive microwave and some scatterometers (heavy) rain influences results and rain flags are provided. Dependent upon what type of information is desired it is relevant to consider the differences of the observations (Hasager, 2014). The passive microwave data are particularly useful for long-term wind speed trend analysis while scatterometers may provide, for example, wind rose data over a couple of decades. SAR covers the coastal regions and resolves at much higher resolution the spatial variability in ocean surface winds. This renders the data particularly useful for comparison to mesoscale modelling of offshore wind resources. In fact, methodologies to combine SAR winds and mesoscale modelling for improved assessment of wind resources at wind turbine hub height have been developed. Combining several types of satellite-based data for offshore wind resource estimation is also possible (Hasager et al., 2015).
4.5. Case study – a near-coastal wind farm project
As a brief case study, we have chosen to look at how remote sensing technologies could be used in the planning, construction and commissioning of a near-coastal wind farm.
4.5.1. Estimating the wind resource
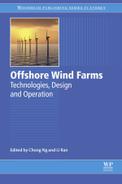
Wind resource estimation in near-coastal areas, within 10 km of the coastline, is particularly challenging to model. This is due to the coastal inhomogeneity, the resolution of the modelling and the complex boundary-layer processes. The grid cell may include both land and sea. These have contrasting aerodynamic roughness, the surface temperatures can be different, thus the stability of the atmosphere above may be different too. Furthermore land–sea breeze, coastal barrier jets and several other phenomena occur due to the coastal difference. It is important to observe coastal offshore winds for accurate prediction of the wind resource. Satellite SAR are the only useful data from space, while horizontal long-range scanning lidar may be deployed onshore. Otherwise, an in situ located buoy with lidar or a meteorological mast may be used. The advantages and limitations of each method have not yet been fully assessed. Research on this topic is on-going in the Danish North Sea (the RUNE project). One example of ocean surface winds observed in the area of interest in the northern part of Jutland is shown in Fig. 4.1. The ocean surface wind map is from the Sentinel1A satellite and the scene is observed from 25 April 2015 at 05:40 UTC and processed by DTU Wind Energy. The red dots in the North Sea are most likely due to high radar returns from large ships while the yellow dots in the Kattegat Sea are due to high radar returns from the wind turbines in the Anholt offshore wind farm. The spatial resolution of the wind map is around 1 km.
4.5.2. Construction phase
For safety, logistical and contractual reasons, weather conditions during the construction period are important to monitor and to document. Particularly if the measurements are to be used to determine the limits of working conditions in respect to contractors, it is important that all parties respect the accuracy of the wind measurement device used for this purpose. A wind lidar deployed at a local harbour or some other suitable onshore location, is a convenient instrument for this function. For deployments further offshore, a floating lidar could provide the necessary wind speed measurements and will in any case give a more accurate representation of the wind speeds pertaining at the actual deployment location but at a much greater cost.
4.5.3. Verification measurements
Once the wind turbines have been installed and commissioned, it is customary to perform power performance verifications on at least some of the machines. Here the use of nacelle-mounted or transition piece lidars can be a much more cost-effective solution than using a traditional meteorological mast and approximately the same measurement uncertainty can be achieved. A floating lidar could also be used for power performance but the much higher costs for this (and higher uncertainty) are probably not justified. Rather use the expensive floating lidar for wind resource exploration for upcoming projects, than for performing power curve verification where cheaper and better methods are available.

Figure 4.1 Ocean surface wind map based on Sentinel1A from 25 April 2015 at 05:40 UTC covering the seas around the northern part of Jutland. Published by permission of DTU Wind Energy. Sentinel1A satellite image from Copernicus, processed by Merete Badger at DTU Wind Energy using the Johns Hopkins University Applied Physics Laboratory software. The work is supported by the RUNE Project.
4.5.4. Wake measurements
Lastly in our case study, let us consider the situation a few years later when the completed wind farm begins to deliver rather less power than before. Suspicion falls on a new wind farm a few kilometres upstream of ‘our’ farm, for which the wake deficit (and the ensuing compensation from the utility) has probably been underestimated. A campaign is designed using both long-range scanning lidars placed in the last row of the upstream farm and in the first row of ‘our’ farm. The lidars, running in a synchronised mode using satellite communication (the two wind farm networks are not permitted to be connected), are able to map the wind field between the two wind farms and perform this function for a 12-month period, covering an annual cycle of stability conditions. A new value for the seasonally weighted wake deficit from the first farm to the second is calculated based on measurements rather than pure modelling as before.
4.6. Future trends
Surface-based remote sensing is becoming more industrialised, meaning that it is becoming much more robust and with more dedicated software but, as yet, not at lower prices. We have already seen this tendency for onshore wind lidars and also for nacelle lidars. In contrast, scanning lidars have yet to reach the same level of maturity and robustness but this is something that is likely to occur in the next few years although their place and justification in the market are still a little unclear. Floating lidars are also still in rapid development and several years will pass before there are a number of technologically mature systems to choose between.
Significant progress is expected in lidar standardisation and recommended practice. The current revision of the IEC 61400-12-1 power curve standard, that includes remote sensing as one of several major new items, was expected to pass to CDV stage in 2015 and be (hopefully) accepted formally in 2016. The revision is already fairly widely used as the basis for bilateral agreements. An IEA Recommended Practices for floating lidars is expected to be completed in 2016. This will supplement the existing IEA Recommended Practices for ground-based remote sensing (Clifton et al., 2013).
Space-borne remote sensing of offshore winds includes Sentinel-1 with operational SAR. Two Sentinel-1 satellites will be in operation for many future years. This is part of the European Copernicus Mission delivering operational satellite data. Also, scatterometer ASCAT operates with two satellites in operational mission and is planned into the future by EUMETSAT. Passive microwave remote sensing of ocean winds is on-going and a couple of new instruments will be launched in due time for three satellites to be operational concurrently. However in the far future this data series may end.
Sources of further information
The IEA Wind Annex32 Website (https://sites.google.com/site/ieawindannex32/home) contains a variety of information and forums concerning wind lidars, floating lidars and nacelle lidars. Of particular relevance to offshore is the Task 1.5 on floating lidars. In Task 2.1 you will find the already-published Recommended Practices for Wind Resource Assessment in Simple Terrain. For a complete list of work tasks, check the table at https://sites.google.com/site/ieawindannex32/wphomes.
The Carbon Trust Offshore Accelerator programme has produced the OWA roadmap for the commercial acceptance of floating LIDAR technology, available from the Carbon Trust Website (www.carbontrust.com).
The Danish Technical University (DTU) has several relevant projects to offshore wind energy. The UniTTe project (http://www.unitte.dk/) is examining new ways of measuring wind turbine power and loads using multibeam nacelle lidars to provide the reference wind information.
Project RUNE (http://www.vindenergi.dtu.dk/english/News/2014/12/The-RUNE-project-Reducing-the-Uncertainty-of-Near-shore-Energy-estimates) is examining how shore-based long-range scanning lidars can be used to reduce the uncertainty of near-shore resource estimates.
Abbreviations and Acronyms
| AEP | Annual energy production |
| CAPEX | Capital expenses |
| CDV | Committee Draft for Voting (stage of a standard) |
| CW | Continuous wave (lidar) |
| IEA | International Energy Agency |
| IEC | International Electrotechnical Commission |
| NORSEWInD | Northern Seas Wind Index Database (EU-FP7 project) |
| OPEX | Operational expenses |
| OWA | Offshore Wind Accelerator (Carbon Trust initiative) |
| RUNE | Reducing Uncertainties in Near-coastal Energy estimates (ForskEL project) |
| SAR | Synthetic aperture radar |
| UniTTe | Unified Turbine Testing (Innovation Fund Denmark project) |
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.