
CHAPTER 9
Virtual Memory
In Chapter 8, we discussed various memory-management strategies used in computer systems. All these strategies have the same goal: to keep many processes in memory simultaneously to allow multiprogramming. However, they tend to require that an entire process be in memory before it can execute.
Virtual memory is a technique that allows the execution of processes that are not completely in memory. One major advantage of this scheme is that programs can be larger than physical memory. Further, virtual memory abstracts main memory into an extremely large, uniform array of storage, separating logical memory as viewed by the user from physical memory. This technique frees programmers from the concerns of memory-storage limitations. Virtual memory also allows processes to share files easily and to implement shared memory. In addition, it provides an efficient mechanism for process creation. Virtual memory is not easy to implement, however, and may substantially decrease performance if it is used carelessly. In this chapter, we discuss virtual memory in the form of demand paging and examine its complexity and cost.
CHAPTER OBJECTIVES
- To describe the benefits of a virtual memory system.
- To explain the concepts of demand paging, page-replacement algorithms, and allocation of page frames.
- To discuss the principles of the working-set model.
- To examine the relationship between shared memory and memory-mapped files.
- To explore how kernel memory is managed.
9.1 Background
The memory-management algorithms outlined in Chapter 8 are necessary because of one basic requirement: The instructions being executed must be in physical memory. The first approach to meeting this requirement is to place the entire logical address space in physical memory. Dynamic loading can help to ease this restriction, but it generally requires special precautions and extra work by the programmer.
The requirement that instructions must be in physical memory to be executed seems both necessary and reasonable; but it is also unfortunate, since it limits the size of a program to the size of physical memory. In fact, an examination of real programs shows us that, in many cases, the entire program is not needed. For instance, consider the following:
- Programs often have code to handle unusual error conditions. Since these errors seldom, if ever, occur in practice, this code is almost never executed.
- Arrays, lists, and tables are often allocated more memory than they actually need. An array may be declared 100 by 100 elements, even though it is seldom larger than 10 by 10 elements. An assembler symbol table may have room for 3,000 symbols, although the average program has less than 200 symbols.
- Certain options and features of a program may be used rarely. For instance, the routines on U.S. government computers that balance the budget have not been used in many years.
Even in those cases where the entire program is needed, it may not all be needed at the same time.
The ability to execute a program that is only partially in memory would confer many benefits:
- A program would no longer be constrained by the amount of physical memory that is available. Users would be able to write programs for an extremely large virtual address space, simplifying the programming task.
- Because each user program could take less physical memory, more programs could be run at the same time, with a corresponding increase in CPU utilization and throughput but with no increase in response time or turnaround time.
- Less I/O would be needed to load or swap user programs into memory, so each user program would run faster.
Thus, running a program that is not entirely in memory would benefit both the system and the user.
Virtual memory involves the separation of logical memory as perceived by users from physical memory. This separation allows an extremely large virtual memory to be provided for programmers when only a smaller physical memory is available (Figure 9.1). Virtual memory makes the task of programming much easier, because the programmer no longer needs to worry about the amount of physical memory available; she can concentrate instead on the problem to be programmed.
The virtual address space of a process refers to the logical (or virtual) view of how a process is stored in memory. Typically, this view is that a process begins at a certain logical address—say, address 0—and exists in contiguous memory, as shown in Figure 9.2. Recall from Chapter 8, though, that in fact physical memory may be organized in page frames and that the physical page frames assigned to a process may not be contiguous. It is up to the memory management unit (MMU) to map logical pages to physical page frames in memory.
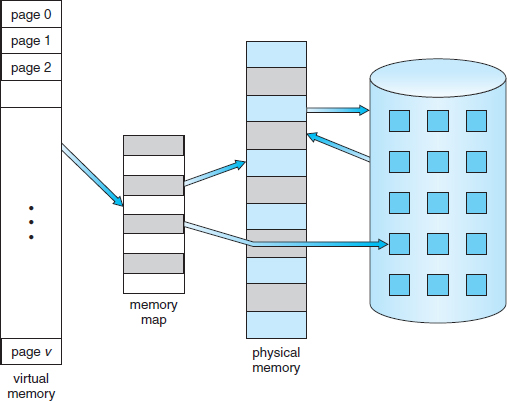
Figure 9.1 Diagram showing virtual memory that is larger than physical memory.
Note in Figure 9.2 that we allow the heap to grow upward in memory as it is used for dynamic memory allocation. Similarly, we allow for the stack to grow downward in memory through successive function calls. The large blank space (or hole) between the heap and the stack is part of the virtual address space but will require actual physical pages only if the heap or stack grows. Virtual address spaces that include holes are known as sparse address spaces. Using a sparse address space is beneficial because the holes can be filled as the stack or heap segments grow or if we wish to dynamically link libraries (or possibly other shared objects) during program execution.
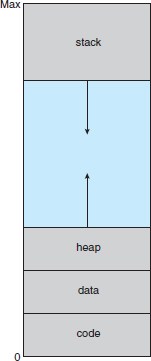
Figure 9.2 Virtual address space.
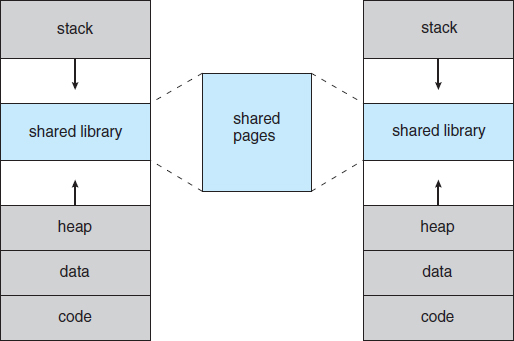
Figure 9.3 Shared library using virtual memory.
In addition to separating logical memory from physical memory, virtual memory allows files and memory to be shared by two or more processes through page sharing (Section 8.5.4). This leads to the following benefits:
- System libraries can be shared by several processes through mapping of the shared object into a virtual address space. Although each process considers the libraries to be part of its virtual address space, the actual pages where the libraries reside in physical memory are shared by all the processes (Figure 9.3). Typically, a library is mapped read-only into the space of each process that is linked with it.
- Similarly, processes can share memory. Recall from Chapter 3 that two or more processes can communicate through the use of shared memory. Virtual memory allows one process to create a region of memory that it can share with another process. Processes sharing this region consider it part of their virtual address space, yet the actual physical pages of memory are shared, much as is illustrated in Figure 9.3.
- Pages can be shared during process creation with the fork() system call, thus speeding up process creation.
We further explore these—and other—benefits of virtual memory later in this chapter. First, though, we discuss implementing virtual memory through demand paging.
9.2 Demand Paging
Consider how an executable program might be loaded from disk into memory. One option is to load the entire program in physical memory at program execution time. However, a problem with this approach is that we may not initially need the entire program in memory. Suppose a program starts with a list of available options from which the user is to select. Loading the entire program into memory results in loading the executable code for all options, regardless of whether or not an option is ultimately selected by the user. An alternative strategy is to load pages only as they are needed. This technique is known as demand paging and is commonly used in virtual memory systems. With demand-paged virtual memory, pages are loaded only when they are demanded during program execution. Pages that are never accessed are thus never loaded into physical memory.
A demand-paging system is similar to a paging system with swapping (Figure 9.4) where processes reside in secondary memory (usually a disk). When we want to execute a process, we swap it into memory. Rather than swapping the entire process into memory, though, we use a lazy swapper. A lazy swapper never swaps a page into memory unless that page will be needed. In the context of a demand-paging system, use of the term “swapper” is technically incorrect. A swapper manipulates entire processes, whereas a pager is concerned with the individual pages of a process. We thus use “pager,” rather than “swapper,” in connection with demand paging.
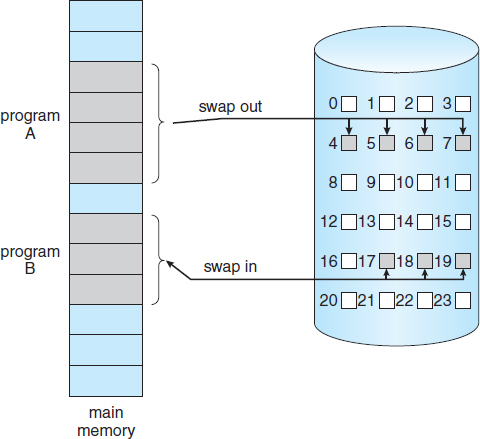
Figure 9.4 Transfer of a paged memory to contiguous disk space.
9.2.1 Basic Concepts
When a process is to be swapped in, the pager guesses which pages will be used before the process is swapped out again. Instead of swapping in a whole process, the pager brings only those pages into memory. Thus, it avoids reading into memory pages that will not be used anyway, decreasing the swap time and the amount of physical memory needed.
With this scheme, we need some form of hardware support to distinguish between the pages that are in memory and the pages that are on the disk. The valid–invalid bit scheme described in Section 8.5.3 can be used for this purpose. This time, however, when this bit is set to “valid,” the associated page is both legal and in memory. If the bit is set to “invalid,” the page either is not valid (that is, not in the logical address space of the process) or is valid but is currently on the disk. The page-table entry for a page that is brought into memory is set as usual, but the page-table entry for a page that is not currently in memory is either simply marked invalid or contains the address of the page on disk. This situation is depicted in Figure 9.5.
Notice that marking a page invalid will have no effect if the process never attempts to access that page. Hence, if we guess right and page in all pages that are actually needed and only those pages, the process will run exactly as though we had brought in all pages. While the process executes and accesses pages that are memory resident, execution proceeds normally.
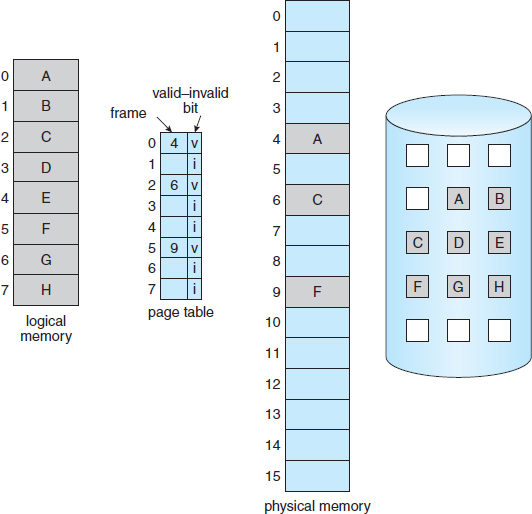
Figure 9.5 Page table when some pages are not in main memory.
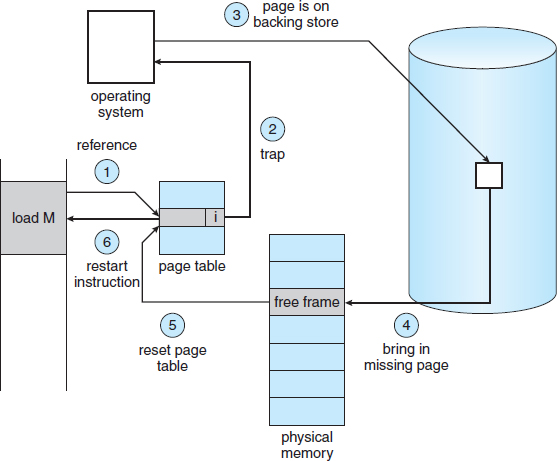
Figure 9.6 Steps in handling a page fault.
But what happens if the process tries to access a page that was not brought into memory? Access to a page marked invalid causes a page fault. The paging hardware, in translating the address through the page table, will notice that the invalid bit is set, causing a trap to the operating system. This trap is the result of the operating system's failure to bring the desired page into memory. The procedure for handling this page fault is straightforward (Figure 9.6):
- We check an internal table (usually kept with the process control block) for this process to determine whether the reference was a valid or an invalid memory access.
- If the reference was invalid, we terminate the process. If it was valid but we have not yet brought in that page, we now page it in.
- We find a free frame (by taking one from the free-frame list, for example).
- We schedule a disk operation to read the desired page into the newly allocated frame.
- When the disk read is complete, we modify the internal table kept with the process and the page table to indicate that the page is now in memory.
- We restart the instruction that was interrupted by the trap. The process can now access the page as though it had always been in memory.
In the extreme case, we can start executing a process with no pages in memory. When the operating system sets the instruction pointer to the first instruction of the process, which is on a non-memory-resident page, the process immediately faults for the page. After this page is brought into memory, the process continues to execute, faulting as necessary until every page that it needs is in memory. At that point, it can execute with no more faults. This scheme is pure demand paging: never bring a page into memory until it is required.
Theoretically, some programs could access several new pages of memory with each instruction execution (one page for the instruction and many for data), possibly causing multiple page faults per instruction. This situation would result in unacceptable system performance. Fortunately, analysis of running processes shows that this behavior is exceedingly unlikely. Programs tend to have locality of reference, described in Section 9.6.1, which results in reasonable performance from demand paging.
The hardware to support demand paging is the same as the hardware for paging and swapping:
- Page table. This table has the ability to mark an entry invalid through a valid–invalid bit or a special value of protection bits.
- Secondary memory. This memory holds those pages that are not present in main memory. The secondary memory is usually a high-speed disk. It is known as the swap device, and the section of disk used for this purpose is known as swap space. Swap-space allocation is discussed in Chapter 10.
A crucial requirement for demand paging is the ability to restart any instruction after a page fault. Because we save the state (registers, condition code, instruction counter) of the interrupted process when the page fault occurs, we must be able to restart the process in exactly the same place and state, except that the desired page is now in memory and is accessible. In most cases, this requirement is easy to meet. A page fault may occur at any memory reference. If the page fault occurs on the instruction fetch, we can restart by fetching the instruction again. If a page fault occurs while we are fetching an operand, we must fetch and decode the instruction again and then fetch the operand.
As a worst-case example, consider a three-address instruction such as ADD the content of A to B, placing the result in C. These are the steps to execute this instruction:
- Fetch and decode the instruction (ADD).
- Fetch A.
- Fetch B.
- Add A and B.
- Store the sum in C.
If we fault when we try to store in C (because C is in a page not currently in memory), we will have to get the desired page, bring it in, correct the page table, and restart the instruction. The restart will require fetching the instruction again, decoding it again, fetching the two operands again, and then adding again. However, there is not much repeated work (less than one complete instruction), and the repetition is necessary only when a page fault occurs.
The major difficulty arises when one instruction may modify several different locations. For example, consider the IBM System 360/370 MVC (move character) instruction, which can move up to 256 bytes from one location to another (possibly overlapping) location. If either block (source or destination) straddles a page boundary, a page fault might occur after the move is partially done. In addition, if the source and destination blocks overlap, the source block may have been modified, in which case we cannot simply restart the instruction.
This problem can be solved in two different ways. In one solution, the microcode computes and attempts to access both ends of both blocks. If a page fault is going to occur, it will happen at this step, before anything is modified. The move can then take place; we know that no page fault can occur, since all the relevant pages are in memory. The other solution uses temporary registers to hold the values of overwritten locations. If there is a page fault, all the old values are written back into memory before the trap occurs. This action restores memory to its state before the instruction was started, so that the instruction can be repeated.
This is by no means the only architectural problem resulting from adding paging to an existing architecture to allow demand paging, but it illustrates some of the difficulties involved. Paging is added between the CPU and the memory in a computer system. It should be entirely transparent to the user process. Thus, people often assume that paging can be added to any system. Although this assumption is true for a non-demand-paging environment, where a page fault represents a fatal error, it is not true where a page fault means only that an additional page must be brought into memory and the process restarted.
9.2.2 Performance of Demand Paging
Demand paging can significantly affect the performance of a computer system. To see why, let's compute the effective access time for a demand-paged memory. For most computer systems, the memory-access time, denoted ma, ranges from 10 to 200 nanoseconds. As long as we have no page faults, the effective access time is equal to the memory access time. If, however, a page fault occurs, we must first read the relevant page from disk and then access the desired word.
Let p be the probability of a page fault (0 ≤ p ≤ 1). We would expect p to be close to zero—that is, we would expect to have only a few page faults. The effective access time is then
effective access time = (1 − p) × ma + p × page fault time.
To compute the effective access time, we must know how much time is needed to service a page fault. A page fault causes the following sequence to occur:
- Trap to the operating system.
- Save the user registers and process state.
- Determine that the interrupt was a page fault.
- Check that the page reference was legal and determine the location of the page on the disk.
- Issue a read from the disk to a free frame:
- Wait in a queue for this device until the read request is serviced.
- Wait for the device seek and/or latency time.
- Begin the transfer of the page to a free frame.
- While waiting, allocate the CPU to some other user (CPU scheduling, optional).
- Receive an interrupt from the disk I/O subsystem (I/O completed).
- Save the registers and process state for the other user (if step 6 is executed).
- Determine that the interrupt was from the disk.
- Correct the page table and other tables to show that the desired page is now in memory.
- Wait for the CPU to be allocated to this process again.
- Restore the user registers, process state, and new page table, and then resume the interrupted instruction.
Not all of these steps are necessary in every case. For example, we are assuming that, in step 6, the CPU is allocated to another process while the I/O occurs. This arrangement allows multiprogramming to maintain CPU utilization but requires additional time to resume the page-fault service routine when the I/O transfer is complete.
In any case, we are faced with three major components of the page-fault service time:
- Service the page-fault interrupt.
- Read in the page.
- Restart the process.
The first and third tasks can be reduced, with careful coding, to several hundred instructions. These tasks may take from 1 to 100 microseconds each. The page-switch time, however, will probably be close to 8 milliseconds. (A typical hard disk has an average latency of 3 milliseconds, a seek of 5 milliseconds, and a transfer time of 0.05 milliseconds. Thus, the total paging time is about 8 milliseconds, including hardware and software time.) Remember also that we are looking at only the device-service time. If a queue of processes is waiting for the device, we have to add device-queueing time as we wait for the paging device to be free to service our request, increasing even more the time to swap.
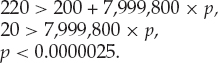
With an average page-fault service time of 8 milliseconds and a memory-access time of 200 nanoseconds, the effective access time in nanoseconds is

We see, then, that the effective access time is directly proportional to the page-fault rate. If one access out of 1,000 causes a page fault, the effective access time is 8.2 microseconds. The computer will be slowed down by a factor of 40 because of demand paging! If we want performance degradation to be less than 10 percent, we need to keep the probability of page faults at the following level:
That is, to keep the slowdown due to paging at a reasonable level, we can allow fewer than one memory access out of 399,990 to page-fault. In sum, it is important to keep the page-fault rate low in a demand-paging system. Otherwise, the effective access time increases, slowing process execution dramatically.
An additional aspect of demand paging is the handling and overall use of swap space. Disk I/O to swap space is generally faster than that to the file system. It is a faster file system because swap space is allocated in much larger blocks, and file lookups and indirect allocation methods are not used (Chapter 10). The system can therefore gain better paging throughput by copying an entire file image into the swap space at process startup and then performing demand paging from the swap space. Another option is to demand pages from the file system initially but to write the pages to swap space as they are replaced. This approach will ensure that only needed pages are read from the file system but that all subsequent paging is done from swap space.
Some systems attempt to limit the amount of swap space used through demand paging of binary files. Demand pages for such files are brought directly from the file system. However, when page replacement is called for, these frames can simply be overwritten (because they are never modified), and the pages can be read in from the file system again if needed. Using this approach, the file system itself serves as the backing store. However, swap space must still be used for pages not associated with a file (known as anonymous memory); these pages include the stack and heap for a process. This method appears to be a good compromise and is used in several systems, including Solaris and BSD UNIX.
Mobile operating systems typically do not support swapping. Instead, these systems demand-page from the file system and reclaim read-only pages (such as code) from applications if memory becomes constrained. Such data can be demand-paged from the file system if it is later needed. Under iOS, anonymous memory pages are never reclaimed from an application unless the application is terminated or explicitly releases the memory.
9.3 Copy-on-Write
In Section 9.2, we illustrated how a process can start quickly by demand-paging in the page containing the first instruction. However, process creation using the fork() system call may initially bypass the need for demand paging by using a technique similar to page sharing (covered in Section 8.5.4). This technique provides rapid process creation and minimizes the number of new pages that must be allocated to the newly created process.
Recall that the fork() system call creates a child process that is a duplicate of its parent. Traditionally, fork() worked by creating a copy of the parent's address space for the child, duplicating the pages belonging to the parent. However, considering that many child processes invoke the exec() system call immediately after creation, the copying of the parent's address space may be unnecessary. Instead, we can use a technique known as copy-on-write, which works by allowing the parent and child processes initially to share the same pages. These shared pages are marked as copy-on-write pages, meaning that if either process writes to a shared page, a copy of the shared page is created. Copy-on-write is illustrated in Figures 9.7 and 9.8, which show the contents of the physical memory before and after process 1 modifies page C.
For example, assume that the child process attempts to modify a page containing portions of the stack, with the pages set to be copy-on-write. The operating system will create a copy of this page, mapping it to the address space of the child process. The child process will then modify its copied page and not the page belonging to the parent process. Obviously, when the copy-on-write technique is used, only the pages that are modified by either process are copied; all unmodified pages can be shared by the parent and child processes. Note, too, that only pages that can be modified need be marked as copy-on-write. Pages that cannot be modified (pages containing executable code) can be shared by the parent and child. Copy-on-write is a common technique used by several operating systems, including Windows XP, Linux, and Solaris.
When it is determined that a page is going to be duplicated using copy-on-write, it is important to note the location from which the free page will be allocated. Many operating systems provide a pool of free pages for such requests. These free pages are typically allocated when the stack or heap for a process must expand or when there are copy-on-write pages to be managed.
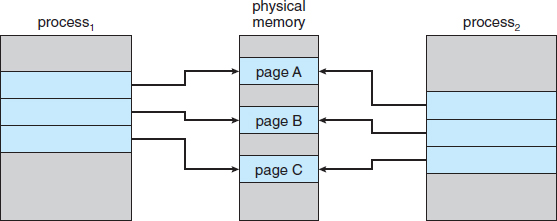
Figure 9.7 Before process 1 modifies page C.
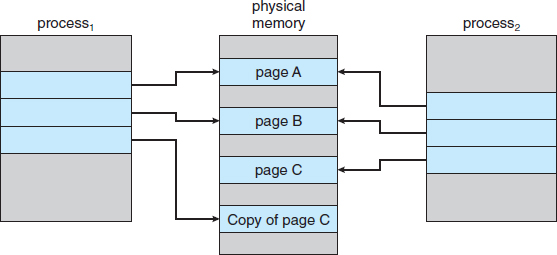
Figure 9.8 After process 1 modifies page C.
Operating systems typically allocate these pages using a technique known as zero-fill-on-demand. Zero-fill-on-demand pages have been zeroed-out before being allocated, thus erasing the previous contents.
Several versions of UNIX (including Solaris and Linux) provide a variation of the fork() system call—vfork() (for virtual memory fork)—that operates differently from fork() with copy-on-write. With vfork(), the parent process is suspended, and the child process uses the address space of the parent. Because vfork() does not use copy-on-write, if the child process changes any pages of the parent's address space, the altered pages will be visible to the parent once it resumes. Therefore, vfork() must be used with caution to ensure that the child process does not modify the address space of the parent. vfork() is intended to be used when the child process calls exec() immediately after creation. Because no copying of pages takes place, vfork() is an extremely efficient method of process creation and is sometimes used to implement UNIX command-line shell interfaces.
9.4 Page Replacement
In our earlier discussion of the page-fault rate, we assumed that each page faults at most once, when it is first referenced. This representation is not strictly accurate, however. If a process of ten pages actually uses only half of them, then demand paging saves the I/O necessary to load the five pages that are never used. We could also increase our degree of multiprogramming by running twice as many processes. Thus, if we had forty frames, we could run eight processes, rather than the four that could run if each required ten frames (five of which were never used).
If we increase our degree of multiprogramming, we are over-allocating memory. If we run six processes, each of which is ten pages in size but actually uses only five pages, we have higher CPU utilization and throughput, with ten frames to spare. It is possible, however, that each of these processes, for a particular data set, may suddenly try to use all ten of its pages, resulting in a need for sixty frames when only forty are available.
Further, consider that system memory is not used only for holding program pages. Buffers for I/O also consume a considerable amount of memory. This use can increase the strain on memory-placement algorithms. Deciding how much memory to allocate to I/O and how much to program pages is a significant challenge. Some systems allocate a fixed percentage of memory for I/O buffers, whereas others allow both user processes and the I/O subsystem to compete for all system memory.
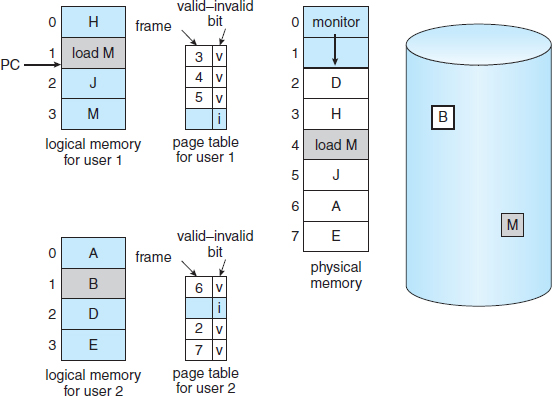
Figure 9.9 Need for page replacement.
Over-allocation of memory manifests itself as follows. While a user process is executing, a page fault occurs. The operating system determines where the desired page is residing on the disk but then finds that there are no free frames on the free-frame list; all memory is in use (Figure 9.9).
The operating system has several options at this point. It could terminate the user process. However, demand paging is the operating system's attempt to improve the computer system's utilization and throughput. Users should not be aware that their processes are running on a paged system—paging should be logically transparent to the user. So this option is not the best choice.
The operating system could instead swap out a process, freeing all its frames and reducing the level of multiprogramming. This option is a good one in certain circumstances, and we consider it further in Section 9.6. Here, we discuss the most common solution: page replacement.
9.4.1 Basic Page Replacement
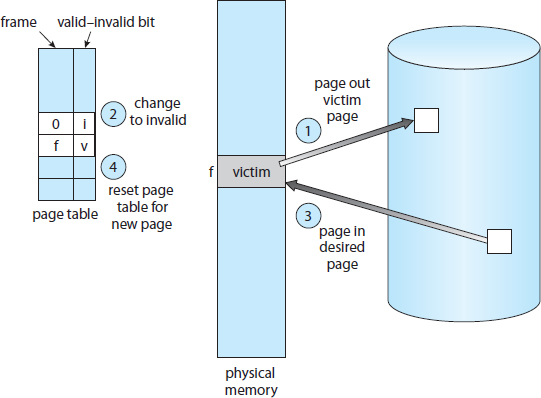
Page replacement takes the following approach. If no frame is free, we find one that is not currently being used and free it. We can free a frame by writing its contents to swap space and changing the page table (and all other tables) to indicate that the page is no longer in memory (Figure 9.10). We can now use the freed frame to hold the page for which the process faulted. We modify the page-fault service routine to include page replacement:
- Find the location of the desired page on the disk.
- Find a free frame:
- If there is a free frame, use it.
- If there is no free frame, use a page-replacement algorithm to select a victim frame.
- Write the victim frame to the disk; change the page and frame tables accordingly.
- Read the desired page into the newly freed frame; change the page and frame tables.
- Continue the user process from where the page fault occurred.
Notice that, if no frames are free, two page transfers (one out and one in) are required. This situation effectively doubles the page-fault service time and increases the effective access time accordingly.
We can reduce this overhead by using a modify bit (or dirty bit). When this scheme is used, each page or frame has a modify bit associated with it in the hardware. The modify bit for a page is set by the hardware whenever any byte in the page is written into, indicating that the page has been modified. When we select a page for replacement, we examine its modify bit. If the bit is set, we know that the page has been modified since it was read in from the disk. In this case, we must write the page to the disk. If the modify bit is not set, however, the page has not been modified since it was read into memory. In this case, we need not write the memory page to the disk: it is already there. This technique also applies to read-only pages (for example, pages of binary code). Such pages cannot be modified; thus, they may be discarded when desired. This scheme can significantly reduce the time required to service a page fault, since it reduces I/O time by one-half if the page has not been modified.
Page replacement is basic to demand paging. It completes the separation between logical memory and physical memory. With this mechanism, an enormous virtual memory can be provided for programmers on a smaller physical memory. With no demand paging, user addresses are mapped into physical addresses, and the two sets of addresses can be different. All the pages of a process still must be in physical memory, however. With demand paging, the size of the logical address space is no longer constrained by physical memory. If we have a user process of twenty pages, we can execute it in ten frames simply by using demand paging and using a replacement algorithm to find a free frame whenever necessary. If a page that has been modified is to be replaced, its contents are copied to the disk. A later reference to that page will cause a page fault. At that time, the page will be brought back into memory, perhaps replacing some other page in the process.
We must solve two major problems to implement demand paging: we must develop a frame-allocation algorithm and a page-replacement algorithm. That is, if we have multiple processes in memory, we must decide how many frames to allocate to each process; and when page replacement is required, we must select the frames that are to be replaced. Designing appropriate algorithms to solve these problems is an important task, because disk I/O is so expensive. Even slight improvements in demand-paging methods yield large gains in system performance.
There are many different page-replacement algorithms. Every operating system probably has its own replacement scheme. How do we select a particular replacement algorithm? In general, we want the one with the lowest page-fault rate.
We evaluate an algorithm by running it on a particular string of memory references and computing the number of page faults. The string of memory references is called a reference string. We can generate reference strings artificially (by using a random-number generator, for example), or we can trace a given system and record the address of each memory reference. The latter choice produces a large number of data (on the order of 1 million addresses per second). To reduce the number of data, we use two facts.
First, for a given page size (and the page size is generally fixed by the hardware or system), we need to consider only the page number, rather than the entire address. Second, if we have a reference to a page p, then any references to page p that immediately follow will never cause a page fault. Page p will be in memory after the first reference, so the immediately following references will not fault.
For example, if we trace a particular process, we might record the following address sequence:
0100, 0432, 0101, 0612, 0102, 0103, 0104, 0101, 0611, 0102, 0103,
0104, 0101, 0610, 0102, 0103, 0104, 0101, 0609, 0102, 0105
At 100 bytes per page, this sequence is reduced to the following reference string:
1, 4, 1, 6, 1, 6, 1, 6, 1, 6, 1
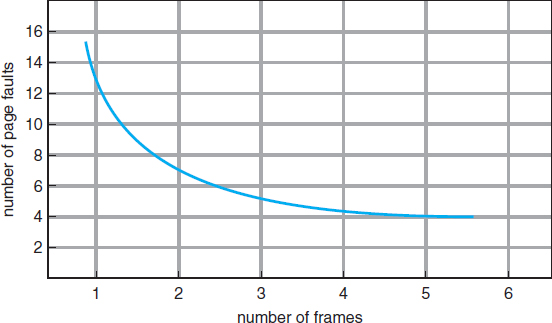
Figure 9.11 Graph of page faults versus number of frames.
To determine the number of page faults for a particular reference string and page-replacement algorithm, we also need to know the number of page frames available. Obviously, as the number of frames available increases, the number of page faults decreases. For the reference string considered previously, for example, if we had three or more frames, we would have only three faults—one fault for the first reference to each page. In contrast, with only one frame available, we would have a replacement with every reference, resulting in eleven faults. In general, we expect a curve such as that in Figure 9.11. As the number of frames increases, the number of page faults drops to some minimal level. Of course, adding physical memory increases the number of frames.
We next illustrate several page-replacement algorithms. In doing so, we use the reference string
7, 0, 1, 2, 0, 3, 0, 4, 2, 3, 0, 3, 2, 1, 2, 0, 1, 7, 0, 1
for a memory with three frames.
9.4.2 FIFO Page Replacement
The simplest page-replacement algorithm is a first-in, first-out (FIFO) algorithm. A FIFO replacement algorithm associates with each page the time when that page was brought into memory. When a page must be replaced, the oldest page is chosen. Notice that it is not strictly necessary to record the time when a page is brought in. We can create a FIFO queue to hold all pages in memory. We replace the page at the head of the queue. When a page is brought into memory, we insert it at the tail of the queue.
For our example reference string, our three frames are initially empty. The first three references (7,0,1) cause page faults and are brought into these empty frames. The next reference (2) replaces page 7, because page 7 was brought in first. Since 0 is the next reference and 0 is already in memory, we have no fault for this reference. The first reference to 3 results in replacement of page 0, since it is now first in line. Because of this replacement, the next reference, to 0, will fault. Page 1 is then replaced by page 0. This process continues as shown in Figure 9.12. Every time a fault occurs, we show which pages are in our three frames. There are fifteen faults altogether.
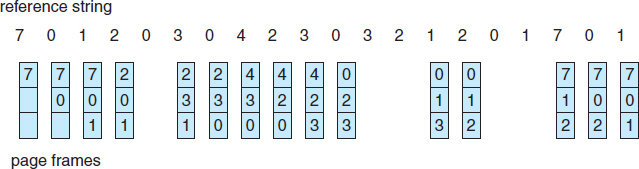
Figure 9.12 FIFO page-replacement algorithm.
The FIFO page-replacement algorithm is easy to understand and program. However, its performance is not always good. On the one hand, the page replaced may be an initialization module that was used a long time ago and is no longer needed. On the other hand, it could contain a heavily used variable that was initialized early and is in constant use.
Notice that, even if we select for replacement a page that is in active use, everything still works correctly. After we replace an active page with a new one, a fault occurs almost immediately to retrieve the active page. Some other page must be replaced to bring the active page back into memory. Thus, a bad replacement choice increases the page-fault rate and slows process execution. It does not, however, cause incorrect execution.
To illustrate the problems that are possible with a FIFO page-replacement algorithm, consider the following reference string:
1, 2, 3, 4, 1, 2, 5, 1, 2, 3, 4, 5
Figure 9.13 shows the curve of page faults for this reference string versus the number of available frames. Notice that the number of faults for four frames (ten) is greater than the number of faults for three frames (nine)! This most unexpected result is known as Belady's anomaly: for some page-replacement algorithms, the page-fault rate may increase as the number of allocated frames increases. We would expect that giving more memory to a process would improve its performance. In some early research, investigators noticed that this assumption was not always true. Belady's anomaly was discovered as a result.
9.4.3 Optimal Page Replacement
One result of the discovery of Belady's anomaly was the search for an optimal page-replacement algorithm—the algorithm that has the lowest page-fault rate of all algorithms and will never suffer from Belady's anomaly. Such an algorithm does exist and has been called OPT or MIN. It is simply this:
Replace the page that will not be used for the longest period of time.
Use of this page-replacement algorithm guarantees the lowest possible page-fault rate for a fixed number of frames.
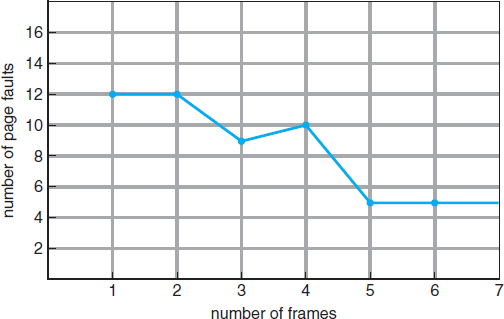
Figure 9.13 Page-fault curve for FIFO replacement on a reference string.
For example, on our sample reference string, the optimal page-replacement algorithm would yield nine page faults, as shown in Figure 9.14. The first three references cause faults that fill the three empty frames. The reference to page 2 replaces page 7, because page 7 will not be used until reference 18, whereas page 0 will be used at 5, and page 1 at 14. The reference to page 3 replaces page 1, as page 1 will be the last of the three pages in memory to be referenced again. With only nine page faults, optimal replacement is much better than a FIFO algorithm, which results in fifteen faults. (If we ignore the first three, which all algorithms must suffer, then optimal replacement is twice as good as FIFO replacement.) In fact, no replacement algorithm can process this reference string in three frames with fewer than nine faults.
Unfortunately, the optimal page-replacement algorithm is difficult to implement, because it requires future knowledge of the reference string. (We encountered a similar situation with the SJF CPU-scheduling algorithm in Section 6.3.2.) As a result, the optimal algorithm is used mainly for comparison studies. For instance, it may be useful to know that, although a new algorithm is not optimal, it is within 12.3 percent of optimal at worst and within 4.7 percent on average.
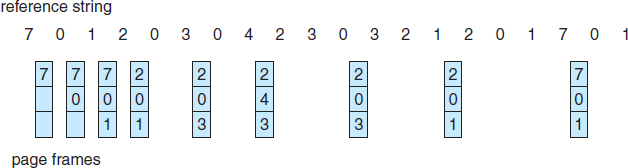
Figure 9.14 Optimal page-replacement algorithm.
9.4.4 LRU Page Replacement
If the optimal algorithm is not feasible, perhaps an approximation of the optimal algorithm is possible. The key distinction between the FIFO and OPT algorithms (other than looking backward versus forward in time) is that the FIFO algorithm uses the time when a page was brought into memory, whereas the OPT algorithm uses the time when a page is to be used. If we use the recent past as an approximation of the near future, then we can replace the page that has not been used for the longest period of time. This approach is the least recently used (LRU) algorithm.
LRU replacement associates with each page the time of that page's last use. When a page must be replaced, LRU chooses the page that has not been used for the longest period of time. We can think of this strategy as the optimal page-replacement algorithm looking backward in time, rather than forward. (Strangely, if we let SR be the reverse of a reference string S, then the page-fault rate for the OPT algorithm on S is the same as the page-fault rate for the OPT algorithm on SR. Similarly, the page-fault rate for the LRU algorithm on S is the same as the page-fault rate for the LRU algorithm on SR.)
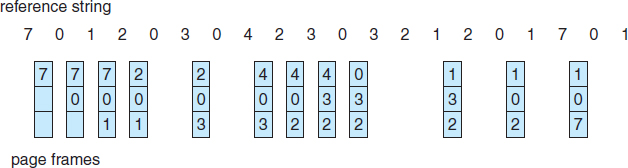
The result of applying LRU replacement to our example reference string is shown in Figure 9.15. The LRU algorithm produces twelve faults. Notice that the first five faults are the same as those for optimal replacement. When the reference to page 4 occurs, however, LRU replacement sees that, of the three frames in memory, page 2 was used least recently. Thus, the LRU algorithm replaces page 2, not knowing that page 2 is about to be used. When it then faults for page 2, the LRU algorithm replaces page 3, since it is now the least recently used of the three pages in memory. Despite these problems, LRU replacement with twelve faults is much better than FIFO replacement with fifteen.
The LRU policy is often used as a page-replacement algorithm and is considered to be good. The major problem is how to implement LRU replacement. An LRU page-replacement algorithm may require substantial hardware assistance. The problem is to determine an order for the frames defined by the time of last use. Two implementations are feasible:
- Counters. In the simplest case, we associate with each page-table entry a time-of-use field and add to the CPU a logical clock or counter. The clock is incremented for every memory reference. Whenever a reference to a page is made, the contents of the clock register are copied to the time-of-use field in the page-table entry for that page. In this way, we always have the “time” of the last reference to each page. We replace the page with the smallest time value. This scheme requires a search of the page table to find the LRU page and a write to memory (to the time-of-use field in the page table) for each memory access. The times must also be maintained when page tables are changed (due to CPU scheduling). Overflow of the clock must be considered.
- Stack. Another approach to implementing LRU replacement is to keep a stack of page numbers. Whenever a page is referenced, it is removed from the stack and put on the top. In this way, the most recently used page is always at the top of the stack and the least recently used page is always at the bottom (Figure 9.16). Because entries must be removed from the middle of the stack, it is best to implement this approach by using a doubly linked list with a head pointer and a tail pointer. Removing a page and putting it on the top of the stack then requires changing six pointers at worst. Each update is a little more expensive, but there is no search for a replacement; the tail pointer points to the bottom of the stack, which is the LRU page. This approach is particularly appropriate for software or microcode implementations of LRU replacement.
Like optimal replacement, LRU replacement does not suffer from Belady's anomaly. Both belong to a class of page-replacement algorithms, called stack algorithms, that can never exhibit Belady's anomaly. A stack algorithm is an algorithm for which it can be shown that the set of pages in memory for n frames is always a subset of the set of pages that would be in memory with n + 1 frames. For LRU replacement, the set of pages in memory would be the n most recently referenced pages. If the number of frames is increased, these n pages will still be the most recently referenced and so will still be in memory.
Note that neither implementation of LRU would be conceivable without hardware assistance beyond the standard TLB registers. The updating of the clock fields or stack must be done for every memory reference. If we were to use an interrupt for every reference to allow software to update such data structures, it would slow every memory reference by a factor of at least ten, hence slowing every user process by a factor of ten. Few systems could tolerate that level of overhead for memory management.
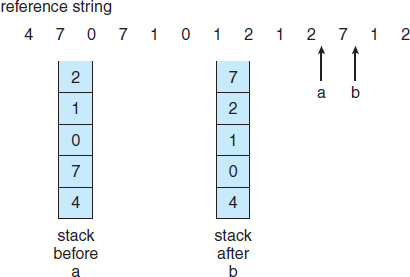
Figure 9.16 Use of a stack to record the most recent page references.
9.4.5 LRU-Approximation Page Replacement
Few computer systems provide sufficient hardware support for true LRU page replacement. In fact, some systems provide no hardware support, and other page-replacement algorithms (such as a FIFO algorithm) must be used. Many systems provide some help, however, in the form of a reference bit. The reference bit for a page is set by the hardware whenever that page is referenced (either a read or a write to any byte in the page). Reference bits are associated with each entry in the page table.
Initially, all bits are cleared (to 0) by the operating system. As a user process executes, the bit associated with each page referenced is set (to 1) by the hardware. After some time, we can determine which pages have been used and which have not been used by examining the reference bits, although we do not know the order of use. This information is the basis for many page-replacement algorithms that approximate LRU replacement.
9.4.5.1 Additional-Reference-Bits Algorithm
We can gain additional ordering information by recording the reference bits at regular intervals. We can keep an 8-bit byte for each page in a table in memory. At regular intervals (say, every 100 milliseconds), a timer interrupt transfers control to the operating system. The operating system shifts the reference bit for each page into the high-order bit of its 8-bit byte, shifting the other bits right by 1 bit and discarding the low-order bit. These 8-bit shift registers contain the history of page use for the last eight time periods. If the shift register contains 00000000, for example, then the page has not been used for eight time periods. A page that is used at least once in each period has a shift register value of 11111111. A page with a history register value of 11000100 has been used more recently than one with a value of 01110111. If we interpret these 8-bit bytes as unsigned integers, the page with the lowest number is the LRU page, and it can be replaced. Notice that the numbers are not guaranteed to be unique, however. We can either replace (swap out) all pages with the smallest value or use the FIFO method to choose among them.
The number of bits of history included in the shift register can be varied, of course, and is selected (depending on the hardware available) to make the updating as fast as possible. In the extreme case, the number can be reduced to zero, leaving only the reference bit itself. This algorithm is called the second-chance page-replacement algorithm.
9.4.5.2 Second-Chance Algorithm
The basic algorithm of second-chance replacement is a FIFO replacement algorithm. When a page has been selected, however, we inspect its reference bit. If the value is 0, we proceed to replace this page; but if the reference bit is set to 1, we give the page a second chance and move on to select the next FIFO page. When a page gets a second chance, its reference bit is cleared, and its arrival time is reset to the current time. Thus, a page that is given a second chance will not be replaced until all other pages have been replaced (or given second chances). In addition, if a page is used often enough to keep its reference bit set, it will never be replaced.
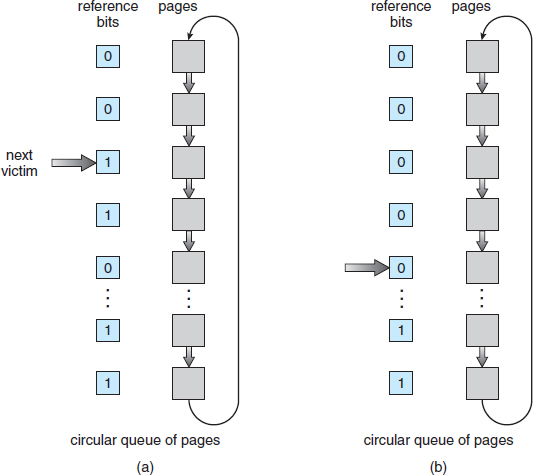
Figure 9.17 Second-chance (clock) page-replacement algorithm.
One way to implement the second-chance algorithm (sometimes referred to as the clock algorithm) is as a circular queue. A pointer (that is, a hand on the clock) indicates which page is to be replaced next. When a frame is needed, the pointer advances until it finds a page with a 0 reference bit. As it advances, it clears the reference bits (Figure 9.17). Once a victim page is found, the page is replaced, and the new page is inserted in the circular queue in that position. Notice that, in the worst case, when all bits are set, the pointer cycles through the whole queue, giving each page a second chance. It clears all the reference bits before selecting the next page for replacement. Second-chance replacement degenerates to FIFO replacement if all bits are set.
9.4.5.3 Enhanced Second-Chance Algorithm
We can enhance the second-chance algorithm by considering the reference bit and the modify bit (described in Section 9.4.1) as an ordered pair. With these two bits, we have the following four possible classes:
- (0, 0) neither recently used nor modified—best page to replace
- (0, 1) not recently used but modified—not quite as good, because the page will need to be written out before replacement
- (1, 0) recently used but clean—probably will be used again soon
- (1, 1) recently used and modified—probably will be used again soon, and the page will be need to be written out to disk before it can be replaced
Each page is in one of these four classes. When page replacement is called for, we use the same scheme as in the clock algorithm; but instead of examining whether the page to which we are pointing has the reference bit set to 1, we examine the class to which that page belongs. We replace the first page encountered in the lowest nonempty class. Notice that we may have to scan the circular queue several times before we find a page to be replaced.
The major difference between this algorithm and the simpler clock algorithm is that here we give preference to those pages that have been modified in order to reduce the number of I/Os required.
9.4.6 Counting-Based Page Replacement
There are many other algorithms that can be used for page replacement. For example, we can keep a counter of the number of references that have been made to each page and develop the following two schemes.
- The least frequently used (LFU) page-replacement algorithm requires that the page with the smallest count be replaced. The reason for this selection is that an actively used page should have a large reference count. A problem arises, however, when a page is used heavily during the initial phase of a process but then is never used again. Since it was used heavily, it has a large count and remains in memory even though it is no longer needed. One solution is to shift the counts right by 1 bit at regular intervals, forming an exponentially decaying average usage count.
- The most frequently used (MFU) page-replacement algorithm is based on the argument that the page with the smallest count was probably just brought in and has yet to be used.
As you might expect, neither MFU nor LFU replacement is common. The implementation of these algorithms is expensive, and they do not approximate OPT replacement well.
9.4.7 Page-Buffering Algorithms
Other procedures are often used in addition to a specific page-replacement algorithm. For example, systems commonly keep a pool of free frames. When a page fault occurs, a victim frame is chosen as before. However, the desired page is read into a free frame from the pool before the victim is written out. This procedure allows the process to restart as soon as possible, without waiting for the victim page to be written out. When the victim is later written out, its frame is added to the free-frame pool.
An expansion of this idea is to maintain a list of modified pages. Whenever the paging device is idle, a modified page is selected and is written to the disk. Its modify bit is then reset. This scheme increases the probability that a page will be clean when it is selected for replacement and will not need to be written out.
Another modification is to keep a pool of free frames but to remember which page was in each frame. Since the frame contents are not modified when a frame is written to the disk, the old page can be reused directly from the free-frame pool if it is needed before that frame is reused. No I/O is needed in this case. When a page fault occurs, we first check whether the desired page is in the free-frame pool. If it is not, we must select a free frame and read into it.
This technique is used in the VAX/VMS system along with a FIFO replacement algorithm. When the FIFO replacement algorithm mistakenly replaces a page that is still in active use, that page is quickly retrieved from the free-frame pool, and no I/O is necessary. The free-frame buffer provides protection against the relatively poor, but simple, FIFO replacement algorithm. This method is necessary because the early versions of VAX did not implement the reference bit correctly.
Some versions of the UNIX system use this method in conjunction with the second-chance algorithm. It can be a useful augmentation to any page replacement algorithm, to reduce the penalty incurred if the wrong victim page is selected.
9.4.8 Applications and Page Replacement
In certain cases, applications accessing data through the operating system's virtual memory perform worse than if the operating system provided no buffering at all. A typical example is a database, which provides its own memory management and I/O buffering. Applications like this understand their memory use and disk use better than does an operating system that is implementing algorithms for general-purpose use. If the operating system is buffering I/O and the application is doing so as well, however, then twice the memory is being used for a set of I/O.
In another example, data warehouses frequently perform massive sequential disk reads, followed by computations and writes. The LRU algorithm would be removing old pages and preserving new ones, while the application would more likely be reading older pages than newer ones (as it starts its sequential reads again). Here, MFU would actually be more efficient than LRU.
Because of such problems, some operating systems give special programs the ability to use a disk partition as a large sequential array of logical blocks, without any file-system data structures. This array is sometimes called the raw disk, and I/O to this array is termed raw I/O. Raw I/O bypasses all the file-system services, such as file I/O demand paging, file locking, prefetching, space allocation, file names, and directories. Note that although certain applications are more efficient when implementing their own special-purpose storage services on a raw partition, most applications perform better when they use the regular file-system services.
9.5 Allocation of Frames
We turn next to the issue of allocation. How do we allocate the fixed amount of free memory among the various processes? If we have 93 free frames and two processes, how many frames does each process get?
The simplest case is the single-user system. Consider a single-user system with 128 KB of memory composed of pages 1 KB in size. This system has 128 frames. The operating system may take 35 KB, leaving 93 frames for the user process. Under pure demand paging, all 93 frames would initially be put on the free-frame list. When a user process started execution, it would generate a sequence of page faults. The first 93 page faults would all get free frames from the free-frame list. When the free-frame list was exhausted, a page-replacement algorithm would be used to select one of the 93 in-memory pages to be replaced with the 94th, and so on. When the process terminated, the 93 frames would once again be placed on the free-frame list.
There are many variations on this simple strategy. We can require that the operating system allocate all its buffer and table space from the free-frame list. When this space is not in use by the operating system, it can be used to support user paging. We can try to keep three free frames reserved on the free-frame list at all times. Thus, when a page fault occurs, there is a free frame available to page into. While the page swap is taking place, a replacement can be selected, which is then written to the disk as the user process continues to execute. Other variants are also possible, but the basic strategy is clear: the user process is allocated any free frame.
9.5.1 Minimum Number of Frames
Our strategies for the allocation of frames are constrained in various ways. We cannot, for example, allocate more than the total number of available frames (unless there is page sharing). We must also allocate at least a minimum number of frames. Here, we look more closely at the latter requirement.
One reason for allocating at least a minimum number of frames involves performance. Obviously, as the number of frames allocated to each process decreases, the page-fault rate increases, slowing process execution. In addition, remember that, when a page fault occurs before an executing instruction is complete, the instruction must be restarted. Consequently, we must have enough frames to hold all the different pages that any single instruction can reference.
For example, consider a machine in which all memory-reference instructions may reference only one memory address. In this case, we need at least one frame for the instruction and one frame for the memory reference. In addition, if one-level indirect addressing is allowed (for example, a load instruction on page 16 can refer to an address on page 0, which is an indirect reference to page 23), then paging requires at least three frames per process. Think about what might happen if a process had only two frames.
The minimum number of frames is defined by the computer architecture. For example, the move instruction for the PDP-11 includes more than one word for some addressing modes, and thus the instruction itself may straddle two pages. In addition, each of its two operands may be indirect references, for a total of six frames. Another example is the IBM 370 MVC instruction. Since the instruction is from storage location to storage location, it takes 6 bytes and can straddle two pages. The block of characters to move and the area to which it is to be moved can each also straddle two pages. This situation would require six frames. The worst case occurs when the MVC instruction is the operand of an EXECUTE instruction that straddles a page boundary; in this case, we need eight frames.
The worst-case scenario occurs in computer architectures that allow multiple levels of indirection (for example, each 16-bit word could contain a 15-bit address plus a 1-bit indirect indicator). Theoretically, a simple load instruction could reference an indirect address that could reference an indirect address (on another page) that could also reference an indirect address (on yet another page), and so on, until every page in virtual memory had been touched. Thus, in the worst case, the entire virtual memory must be in physical memory. To overcome this difficulty, we must place a limit on the levels of indirection (for example, limit an instruction to at most 16 levels of indirection). When the first indirection occurs, a counter is set to 16; the counter is then decremented for each successive indirection for this instruction. If the counter is decremented to 0, a trap occurs (excessive indirection). This limitation reduces the maximum number of memory references per instruction to 17, requiring the same number of frames.
Whereas the minimum number of frames per process is defined by the architecture, the maximum number is defined by the amount of available physical memory. In between, we are still left with significant choice in frame allocation.
9.5.2 Allocation Algorithms
The easiest way to split m frames among n processes is to give everyone an equal share, m/n frames (ignoring frames needed by the operating system for the moment). For instance, if there are 93 frames and five processes, each process will get 18 frames. The three leftover frames can be used as a free-frame buffer pool. This scheme is called equal allocation.
An alternative is to recognize that various processes will need differing amounts of memory. Consider a system with a 1-KB frame size. If a small student process of 10 KB and an interactive database of 127 KB are the only two processes running in a system with 62 free frames, it does not make much sense to give each process 31 frames. The student process does not need more than 10 frames, so the other 21 are, strictly speaking, wasted.
To solve this problem, we can use proportional allocation, in which we allocate available memory to each process according to its size. Let the size of the virtual memory for process pi be si, and define
![]()
Then, if the total number of available frames is m, we allocate ai frames to process pi, where ai is approximately
![]()
Of course, we must adjust each ai to be an integer that is greater than the minimum number of frames required by the instruction set, with a sum not exceeding m.
With proportional allocation, we would split 62 frames between two processes, one of 10 pages and one of 127 pages, by allocating 4 frames and 57 frames, respectively, since
![]()
In this way, both processes share the available frames according to their “needs,” rather than equally.
In both equal and proportional allocation, of course, the allocation may vary according to the multiprogramming level. If the multiprogramming level is increased, each process will lose some frames to provide the memory needed for the new process. Conversely, if the multiprogramming level decreases, the frames that were allocated to the departed process can be spread over the remaining processes.
Notice that, with either equal or proportional allocation, a high-priority process is treated the same as a low-priority process. By its definition, however, we may want to give the high-priority process more memory to speed its execution, to the detriment of low-priority processes. One solution is to use a proportional allocation scheme wherein the ratio of frames depends not on the relative sizes of processes but rather on the priorities of processes or on a combination of size and priority.
9.5.3 Global versus Local Allocation
Another important factor in the way frames are allocated to the various processes is page replacement. With multiple processes competing for frames, we can classify page-replacement algorithms into two broad categories: global replacement and local replacement. Global replacement allows a process to select a replacement frame from the set of all frames, even if that frame is currently allocated to some other process; that is, one process can take a frame from another. Local replacement requires that each process select from only its own set of allocated frames.
For example, consider an allocation scheme wherein we allow high-priority processes to select frames from low-priority processes for replacement. A process can select a replacement from among its own frames or the frames of any lower-priority process. This approach allows a high-priority process to increase its frame allocation at the expense of a low-priority process. With a local replacement strategy, the number of frames allocated to a process does not change. With global replacement, a process may happen to select only frames allocated to other processes, thus increasing the number of frames allocated to it (assuming that other processes do not choose its frames for replacement).
One problem with a global replacement algorithm is that a process cannot control its own page-fault rate. The set of pages in memory for a process depends not only on the paging behavior of that process but also on the paging behavior of other processes. Therefore, the same process may perform quite differently (for example, taking 0.5 seconds for one execution and 10.3 seconds for the next execution) because of totally external circumstances. Such is not the case with a local replacement algorithm. Under local replacement, the set of pages in memory for a process is affected by the paging behavior of only that process. Local replacement might hinder a process, however, by not making available to it other, less used pages of memory. Thus, global replacement generally results in greater system throughput and is therefore the more commonly used method.
9.5.4 Non-Uniform Memory Access
Thus far in our coverage of virtual memory, we have assumed that all main memory is created equal—or at least that it is accessed equally. On many computer systems, that is not the case. Often, in systems with multiple CPUs (Section 1.3.2), a given CPU can access some sections of main memory faster than it can access others. These performance differences are caused by how CPUs and memory are interconnected in the system. Frequently, such a system is made up of several system boards, each containing multiple CPUs and some memory. The system boards are interconnected in various ways, ranging from system buses to high-speed network connections like InfiniBand. As you might expect, the CPUs on a particular board can access the memory on that board with less delay than they can access memory on other boards in the system. Systems in which memory access times vary significantly are known collectively as non-uniform memory access (NUMA) systems, and without exception, they are slower than systems in which memory and CPUs are located on the same motherboard.
Managing which page frames are stored at which locations can significantly affect performance in NUMA systems. If we treat memory as uniform in such a system, CPUs may wait significantly longer for memory access than if we modify memory allocation algorithms to take NUMA into account. Similar changes must be made to the scheduling system. The goal of these changes is to have memory frames allocated “as close as possible” to the CPU on which the process is running. The definition of “close” is “with minimum latency,” which typically means on the same system board as the CPU.
The algorithmic changes consist of having the scheduler track the last CPU on which each process ran. If the scheduler tries to schedule each process onto its previous CPU, and the memory-management system tries to allocate frames for the process close to the CPU on which it is being scheduled, then improved cache hits and decreased memory access times will result.
The picture is more complicated once threads are added. For example, a process with many running threads may end up with those threads scheduled on many different system boards. How is the memory to be allocated in this case? Solaris solves the problem by creating lgroups (for “latency groups”) in the kernel. Each lgroup gathers together close CPUs and memory. In fact, there is a hierarchy of lgroups based on the amount of latency between the groups. Solaris tries to schedule all threads of a process and allocate all memory of a process within an lgroup. If that is not possible, it picks nearby lgroups for the rest of the resources needed. This practice minimizes overall memory latency and maximizes CPU cache hit rates.
9.6 Thrashing
If the number of frames allocated to a low-priority process falls below the minimum number required by the computer architecture, we must suspend that process's execution. We should then page out its remaining pages, freeing all its allocated frames. This provision introduces a swap-in, swap-out level of intermediate CPU scheduling.
In fact, look at any process that does not have “enough” frames. If the process does not have the number of frames it needs to support pages in active use, it will quickly page-fault. At this point, it must replace some page. However, since all its pages are in active use, it must replace a page that will be needed again right away. Consequently, it quickly faults again, and again, and again, replacing pages that it must bring back in immediately.
This high paging activity is called thrashing. A process is thrashing if it is spending more time paging than executing.
9.6.1 Cause of Thrashing
Thrashing results in severe performance problems. Consider the following scenario, which is based on the actual behavior of early paging systems.
The operating system monitors CPU utilization. If CPU utilization is too low, we increase the degree of multiprogramming by introducing a new process to the system. A global page-replacement algorithm is used; it replaces pages without regard to the process to which they belong. Now suppose that a process enters a new phase in its execution and needs more frames. It starts faulting and taking frames away from other processes. These processes need those pages, however, and so they also fault, taking frames from other processes. These faulting processes must use the paging device to swap pages in and out. As they queue up for the paging device, the ready queue empties. As processes wait for the paging device, CPU utilization decreases.
The CPU scheduler sees the decreasing CPU utilization and increases the degree of multiprogramming as a result. The new process tries to get started by taking frames from running processes, causing more page faults and a longer queue for the paging device. As a result, CPU utilization drops even further, and the CPU scheduler tries to increase the degree of multiprogramming even more. Thrashing has occurred, and system throughput plunges. The page-fault rate increases tremendously. As a result, the effective memory-access time increases. No work is getting done, because the processes are spending all their time paging.
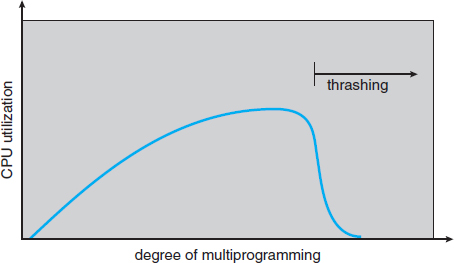
This phenomenon is illustrated in Figure 9.18, in which CPU utilization is plotted against the degree of multiprogramming. As the degree of multiprogramming increases, CPU utilization also increases, although more slowly, until a maximum is reached. If the degree of multiprogramming is increased even further, thrashing sets in, and CPU utilization drops sharply. At this point, to increase CPU utilization and stop thrashing, we must decrease the degree of multiprogramming.
We can limit the effects of thrashing by using a local replacement algorithm (or priority replacement algorithm). With local replacement, if one process starts thrashing, it cannot steal frames from another process and cause the latter to thrash as well. However, the problem is not entirely solved. If processes are thrashing, they will be in the queue for the paging device most of the time. The average service time for a page fault will increase because of the longer average queue for the paging device. Thus, the effective access time will increase even for a process that is not thrashing.
To prevent thrashing, we must provide a process with as many frames as it needs. But how do we know how many frames it “needs”? There are several techniques. The working-set strategy (Section 9.6.2) starts by looking at how many frames a process is actually using. This approach defines the locality model of process execution.
The locality model states that, as a process executes, it moves from locality to locality. A locality is a set of pages that are actively used together (Figure 9.19). A program is generally composed of several different localities, which may overlap.
For example, when a function is called, it defines a new locality. In this locality, memory references are made to the instructions of the function call, its local variables, and a subset of the global variables. When we exit the function, the process leaves this locality, since the local variables and instructions of the function are no longer in active use. We may return to this locality later.
Thus, we see that localities are defined by the program structure and its data structures. The locality model states that all programs will exhibit this basic memory reference structure. Note that the locality model is the unstated principle behind the caching discussions so far in this book. If accesses to any types of data were random rather than patterned, caching would be useless.
Suppose we allocate enough frames to a process to accommodate its current locality. It will fault for the pages in its locality until all these pages are in memory; then, it will not fault again until it changes localities. If we do not allocate enough frames to accommodate the size of the current locality, the process will thrash, since it cannot keep in memory all the pages that it is actively using.
9.6.2 Working-Set Model
As mentioned, the working-set model is based on the assumption of locality. This model uses a parameter, Δ, to define the working-set window. The idea is to examine the most recent Δ page references. The set of pages in the most recent Δ page references is the working set (Figure 9.20). If a page is in active use, it will be in the working set. If it is no longer being used, it will drop from the working set Δ time units after its last reference. Thus, the working set is an approximation of the program's locality.
For example, given the sequence of memory references shown in Figure 9.20, if Δ = 10 memory references, then the working set at time t1 is {1, 2, 5, 6, 7}. By time t2, the working set has changed to {3, 4}.
The accuracy of the working set depends on the selection of Δ. If Δ is too small, it will not encompass the entire locality; if Δ is too large, it may overlap several localities. In the extreme, if Δ is infinite, the working set is the set of pages touched during the process execution.
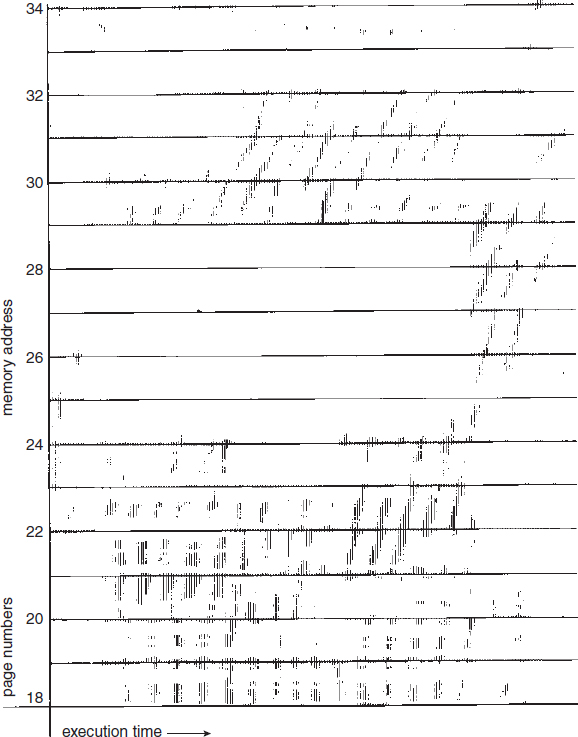
Figure 9.19 Locality in a memory-reference pattern.
The most important property of the working set, then, is its size. If we compute the working-set size, WSSi, for each process in the system, we can then consider that
![]()
where D is the total demand for frames. Each process is actively using the pages in its working set. Thus, process i needs WSSi frames. If the total demand is greater than the total number of available frames (D > m), thrashing will occur, because some processes will not have enough frames.
Once Δ has been selected, use of the working-set model is simple. The operating system monitors the working set of each process and allocates to that working set enough frames to provide it with its working-set size. If there are enough extra frames, another process can be initiated. If the sum of the working-set sizes increases, exceeding the total number of available frames, the operating system selects a process to suspend. The process's pages are written out (swapped), and its frames are reallocated to other processes. The suspended process can be restarted later.

Figure 9.20 Working-set model.
This working-set strategy prevents thrashing while keeping the degree of multiprogramming as high as possible. Thus, it optimizes CPU utilization. The difficulty with the working-set model is keeping track of the working set. The working-set window is a moving window. At each memory reference, a new reference appears at one end, and the oldest reference drops off the other end. A page is in the working set if it is referenced anywhere in the working-set window.
We can approximate the working-set model with a fixed-interval timer interrupt and a reference bit. For example, assume that Δ equals 10,000 references and that we can cause a timer interrupt every 5,000 references. When we get a timer interrupt, we copy and clear the reference-bit values for each page. Thus, if a page fault occurs, we can examine the current reference bit and two in-memory bits to determine whether a page was used within the last 10,000 to 15,000 references. If it was used, at least one of these bits will be on. If it has not been used, these bits will be off. Pages with at least one bit on will be considered to be in the working set.
Note that this arrangement is not entirely accurate, because we cannot tell where, within an interval of 5,000, a reference occurred. We can reduce the uncertainty by increasing the number of history bits and the frequency of interrupts (for example, 10 bits and interrupts every 1,000 references). However, the cost to service these more frequent interrupts will be correspondingly higher.
9.6.3 Page-Fault Frequency
The working-set model is successful, and knowledge of the working set can be useful for prepaging (Section 9.9.1), but it seems a clumsy way to control thrashing. A strategy that uses the page-fault frequency (PFF) takes a more direct approach.
The specific problem is how to prevent thrashing. Thrashing has a high page-fault rate. Thus, we want to control the page-fault rate. When it is too high, we know that the process needs more frames. Conversely, if the page-fault rate is too low, then the process may have too many frames. We can establish upper and lower bounds on the desired page-fault rate (Figure 9.21). If the actual page-fault rate exceeds the upper limit, we allocate the process another frame. If the page-fault rate falls below the lower limit, we remove a frame from the process. Thus, we can directly measure and control the page-fault rate to prevent thrashing.
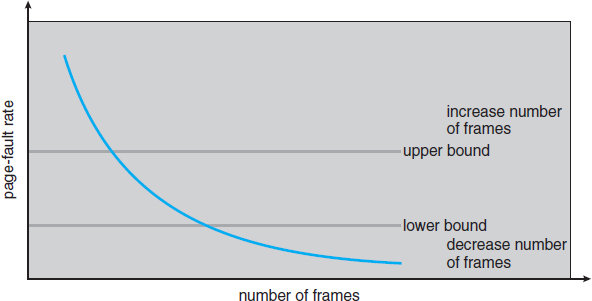
Figure 9.21 Page-fault frequency.
As with the working-set strategy, we may have to swap out a process. If the page-fault rate increases and no free frames are available, we must select some process and swap it out to backing store. The freed frames are then distributed to processes with high page-fault rates.
9.6.4 Concluding Remarks
Practically speaking, thrashing and the resulting swapping have a disagreeably large impact on performance. The current best practice in implementing a computer facility is to include enough physical memory, whenever possible, to avoid thrashing and swapping. From smartphones through mainframes, providing enough memory to keep all working sets in memory concurrently, except under extreme conditions, gives the best user experience.
9.7 Memory-Mapped Files
Consider a sequential read of a file on disk using the standard system calls open(), read(), and write(). Each file access requires a system call and disk access. Alternatively, we can use the virtual memory techniques discussed so far to treat file I/O as routine memory accesses. This approach, known as memory mapping a file, allows a part of the virtual address space to be logically associated with the file. As we shall see, this can lead to significant performance increases.
9.7.1 Basic Mechanism
Memory mapping a file is accomplished by mapping a disk block to a page (or pages) in memory. Initial access to the file proceeds through ordinary demand paging, resulting in a page fault. However, a page-sized portion of the file is read from the file system into a physical page (some systems may opt to read in more than a page-sized chunk of memory at a time). Subsequent reads and writes to the file are handled as routine memory accesses. Manipulating files through memory rather than incurring the overhead of using the read() and write() system calls simplifies and speeds up file access and usage.
WORKING SETS AND PAGE-FAULT RATES
There is a direct relationship between the working set of a process and its page-fault rate. Typically, as shown in Figure 9.20, the working set of a process changes over time as references to data and code sections move from one locality to another. Assuming there is sufficient memory to store the working set of a process (that is, the process is not thrashing), the page-fault rate of the process will transition between peaks and valleys over time. This general behavior is shown below:
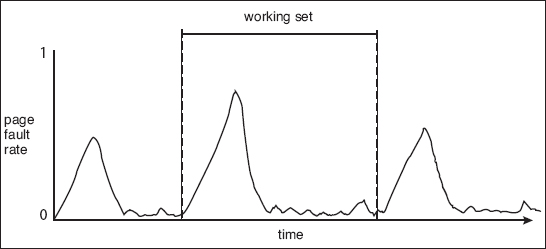
A peak in the page-fault rate occurs when we begin demand-paging a new locality. However, once the working set of this new locality is in memory, the page-fault rate falls. When the process moves to a new working set, the page-fault rate rises toward a peak once again, returning to a lower rate once the new working set is loaded into memory. The span of time between the start of one peak and the start of the next peak represents the transition from one working set to another.
Note that writes to the file mapped in memory are not necessarily immediate (synchronous) writes to the file on disk. Some systems may choose to update the physical file when the operating system periodically checks whether the page in memory has been modified. When the file is closed, all the memory-mapped data are written back to disk and removed from the virtual memory of the process.
Some operating systems provide memory mapping only through a specific system call and use the standard system calls to perform all other file I/O. However, some systems choose to memory-map a file regardless of whether the file was specified as memory-mapped. Let's take Solaris as an example. If a file is specified as memory-mapped (using the mmap() system call), Solaris maps the file into the address space of the process. If a file is opened and accessed using ordinary system calls, such as open(), read(), and write(), Solaris still memory-maps the file; however, the file is mapped to the kernel address space. Regardless of how the file is opened, then, Solaris treats all file I/O as memory-mapped, allowing file access to take place via the efficient memory subsystem.
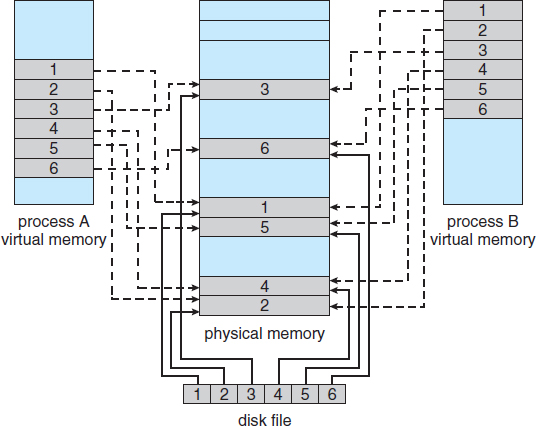
Figure 9.22 Memory-mapped files.
Multiple processes may be allowed to map the same file concurrently, to allow sharing of data. Writes by any of the processes modify the data in virtual memory and can be seen by all others that map the same section of the file. Given our earlier discussions of virtual memory, it should be clear how the sharing of memory-mapped sections of memory is implemented: the virtual memory map of each sharing process points to the same page of physical memory—the page that holds a copy of the disk block. This memory sharing is illustrated in Figure 9.22. The memory-mapping system calls can also support copy-on-write functionality, allowing processes to share a file in read-only mode but to have their own copies of any data they modify. So that access to the shared data is coordinated, the processes involved might use one of the mechanisms for achieving mutual exclusion described in Chapter 5.
Quite often, shared memory is in fact implemented by memory mapping files. Under this scenario, processes can communicate using shared memory by having the communicating processes memory-map the same file into their virtual address spaces. The memory-mapped file serves as the region of shared memory between the communicating processes (Figure 9.23). We have already seen this in Section 3.4.1, where a POSIX shared memory object is created and each communicating process memory-maps the object into its address space. In the following section, we illustrate support in the Windows API for shared memory using memory-mapped files.
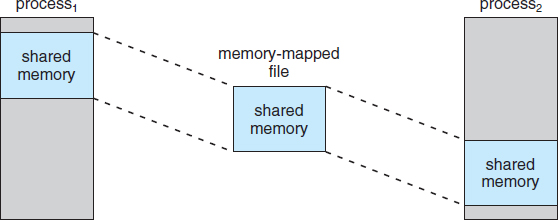
Figure 9.23 Shared memory using memory-mapped I/O.
9.7.2 Shared Memory in the Windows API
The general outline for creating a region of shared memory using memory-mapped files in the Windows API involves first creating a file mapping for the file to be mapped and then establishing a view of the mapped file in a process's virtual address space. A second process can then open and create a view of the mapped file in its virtual address space. The mapped file represents the shared-memory object that will enable communication to take place between the processes.
We next illustrate these steps in more detail. In this example, a producer process first creates a shared-memory object using the memory-mapping features available in the Windows API. The producer then writes a message to shared memory. After that, a consumer process opens a mapping to the shared-memory object and reads the message written by the consumer.
To establish a memory-mapped file, a process first opens the file to be mapped with the CreateFile() function, which returns a HANDLE to the opened file. The process then creates a mapping of this file HANDLE using the CreateFileMapping() function. Once the file mapping is established, the process then establishes a view of the mapped file in its virtual address space with the MapViewOfFile() function. The view of the mapped file represents the portion of the file being mapped in the virtual address space of the process—the entire file or only a portion of it may be mapped. We illustrate this sequence in the program shown in Figure 9.24. (We eliminate much of the error checking for code brevity.)
The call to CreateFileMapping() creates a named shared-memory object called SharedObject. The consumer process will communicate using this shared-memory segment by creating a mapping to the same named object. The producer then creates a view of the memory-mapped file in its virtual address space. By passing the last three parameters the value 0, it indicates that the mapped view is the entire file. It could instead have passed values specifying an offset and size, thus creating a view containing only a subsection of the file. (It is important to note that the entire mapping may not be loaded into memory when the mapping is established. Rather, the mapped file may be demand-paged, thus bringing pages into memory only as they are accessed.) The MapViewOfFile() function returns a pointer to the shared-memory object; any accesses to this memory location are thus accesses to the memory-mapped file. In this instance, the producer process writes the message “Shared memory message” to shared memory.
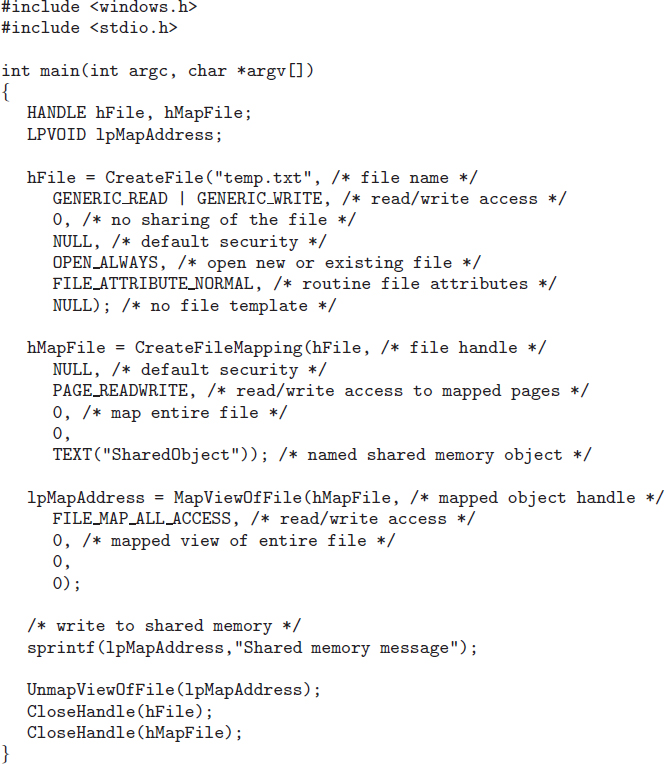
Figure 9.24 Producer writing to shared memory using the Windows API.
A program illustrating how the consumer process establishes a view of the named shared-memory object is shown in Figure 9.25. This program is somewhat simpler than the one shown in Figure 9.24, as all that is necessary is for the process to create a mapping to the existing named shared-memory object. The consumer process must also create a view of the mapped file, just as the producer process did in the program in Figure 9.24. The consumer then reads from shared memory the message “Shared memory message” that was written by the producer process.
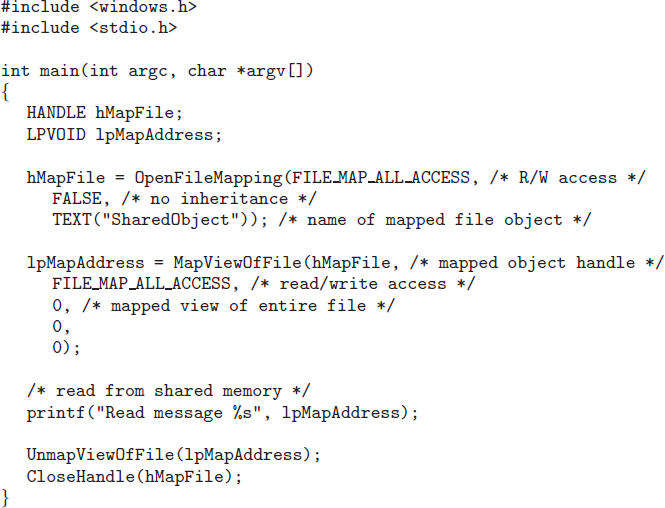
Figure 9.25 Consumer reading from shared memory using the Windows API.
Finally, both processes remove the view of the mapped file with a call to UnmapViewOfFile(). We provide a programming exercise at the end of this chapter using shared memory with memory mapping in the Windows API.
9.7.3 Memory-Mapped I/O
In the case of I/O, as mentioned in Section 1.2.1, each I/O controller includes registers to hold commands and the data being transferred. Usually, special I/O instructions allow data transfers between these registers and system memory. To allow more convenient access to I/O devices, many computer architectures provide memory-mapped I/O. In this case, ranges of memory addresses are set aside and are mapped to the device registers. Reads and writes to these memory addresses cause the data to be transferred to and from the device registers. This method is appropriate for devices that have fast response times, such as video controllers. In the IBM PC, each location on the screen is mapped to a memory location. Displaying text on the screen is almost as easy as writing the text into the appropriate memory-mapped locations.
Memory-mapped I/O is also convenient for other devices, such as the serial and parallel ports used to connect modems and printers to a computer. The CPU transfers data through these kinds of devices by reading and writing a few device registers, called an I/O port. To send out a long string of bytes through a memory-mapped serial port, the CPU writes one data byte to the data register and sets a bit in the control register to signal that the byte is available. The device takes the data byte and then clears the bit in the control register to signal that it is ready for the next byte. Then the CPU can transfer the next byte. If the CPU uses polling to watch the control bit, constantly looping to see whether the device is ready, this method of operation is called programmed I/O (PIO). If the CPU does not poll the control bit, but instead receives an interrupt when the device is ready for the next byte, the data transfer is said to be interrupt driven.
9.8 Allocating Kernel Memory
When a process running in user mode requests additional memory, pages are allocated from the list of free page frames maintained by the kernel. This list is typically populated using a page-replacement algorithm such as those discussed in Section 9.4 and most likely contains free pages scattered throughout physical memory, as explained earlier. Remember, too, that if a user process requests a single byte of memory, internal fragmentation will result, as the process will be granted an entire page frame.
Kernel memory is often allocated from a free-memory pool different from the list used to satisfy ordinary user-mode processes. There are two primary reasons for this:
- The kernel requests memory for data structures of varying sizes, some of which are less than a page in size. As a result, the kernel must use memory conservatively and attempt to minimize waste due to fragmentation. This is especially important because many operating systems do not subject kernel code or data to the paging system.
- Pages allocated to user-mode processes do not necessarily have to be in contiguous physical memory. However, certain hardware devices interact directly with physical memory—without the benefit of a virtual memory interface—and consequently may require memory residing in physically contiguous pages.
In the following sections, we examine two strategies for managing free memory that is assigned to kernel processes: the “buddy system” and slab allocation.
9.8.1 Buddy System
The buddy system allocates memory from a fixed-size segment consisting of physically contiguous pages. Memory is allocated from this segment using a power-of-2 allocator, which satisfies requests in units sized as a power of 2 (4 KB, 8 KB, 16 KB, and so forth). A request in units not appropriately sized is rounded up to the next highest power of 2. For example, a request for 11 KB is satisfied with a 16-KB segment.
Let's consider a simple example. Assume the size of a memory segment is initially 256 KB and the kernel requests 21 KB of memory. The segment is initially divided into two buddies—which we will call AL and AR—each 128 KB in size. One of these buddies is further divided into two 64-KB buddies—BL and BR. However, the next-highest power of 2 from 21 KB is 32 KB so either BL or BR is again divided into two 32-KB buddies, CL and CR. One of these buddies is used to satisfy the 21-KB request. This scheme is illustrated in Figure 9.26, where CL is the segment allocated to the 21-KB request.
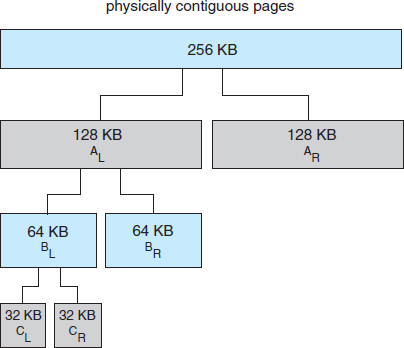
Figure 9.26 Buddy system allocation.
An advantage of the buddy system is how quickly adjacent buddies can be combined to form larger segments using a technique known as coalescing. In Figure 9.26, for example, when the kernel releases the CL unit it was allocated, the system can coalesce CL and CR into a 64-KB segment. This segment, BL, can in turn be coalesced with its buddy BR to form a 128-KB segment. Ultimately, we can end up with the original 256-KB segment.
The obvious drawback to the buddy system is that rounding up to the next highest power of 2 is very likely to cause fragmentation within allocated segments. For example, a 33-KB request can only be satisfied with a 64-KB segment. In fact, we cannot guarantee that less than 50 percent of the allocated unit will be wasted due to internal fragmentation. In the following section, we explore a memory allocation scheme where no space is lost due to fragmentation.
9.8.2 Slab Allocation
A second strategy for allocating kernel memory is known as slab allocation. A slab is made up of one or more physically contiguous pages. A cache consists of one or more slabs. There is a single cache for each unique kernel data structure—for example, a separate cache for the data structure representing process descriptors, a separate cache for file objects, a separate cache for semaphores, and so forth. Each cache is populated with objects that are instantiations of the kernel data structure the cache represents. For example, the cache representing semaphores stores instances of semaphore objects, the cache representing process descriptors stores instances of process descriptor objects, and so forth. The relationship among slabs, caches, and objects is shown in Figure 9.27. The figure shows two kernel objects 3 KB in size and three objects 7 KB in size, each stored in a separate cache.
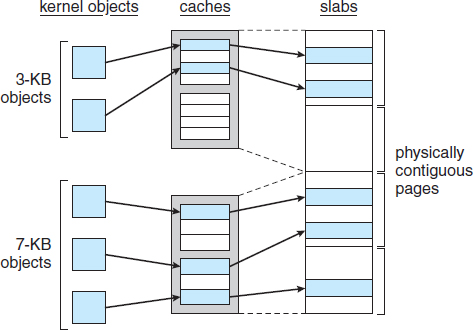
The slab-allocation algorithm uses caches to store kernel objects. When a cache is created, a number of objects—which are initially marked as free—are allocated to the cache. The number of objects in the cache depends on the size of the associated slab. For example, a 12-KB slab (made up of three continguous 4-KB pages) could store six 2-KB objects. Initially, all objects in the cache are marked as free. When a new object for a kernel data structure is needed, the allocator can assign any free object from the cache to satisfy the request. The object assigned from the cache is marked as used.
Let's consider a scenario in which the kernel requests memory from the slab allocator for an object representing a process descriptor. In Linux systems, a process descriptor is of the type struct task_struct, which requires approximately 1.7 KB of memory. When the Linux kernel creates a new task, it requests the necessary memory for the struct task_struct object from its cache. The cache will fulfill the request using a struct task_struct object that has already been allocated in a slab and is marked as free.
In Linux, a slab may be in one of three possible states:
- Full. All objects in the slab are marked as used.
- Empty. All objects in the slab are marked as free.
- Partial. The slab consists of both used and free objects.
The slab allocator first attempts to satisfy the request with a free object in a partial slab. If none exists, a free object is assigned from an empty slab. If no empty slabs are available, a new slab is allocated from contiguous physical pages and assigned to a cache; memory for the object is allocated from this slab.
The slab allocator provides two main benefits:
- No memory is wasted due to fragmentation. Fragmentation is not an issue because each unique kernel data structure has an associated cache, and each cache is made up of one or more slabs that are divided into chunks the size of the objects being represented. Thus, when the kernel requests memory for an object, the slab allocator returns the exact amount of memory required to represent the object.
- Memory requests can be satisfied quickly. The slab allocation scheme is thus particularly effective for managing memory when objects are frequently allocated and deallocated, as is often the case with requests from the kernel. The act of allocating—and releasing—memory can be a time-consuming process. However, objects are created in advance and thus can be quickly allocated from the cache. Furthermore, when the kernel has finished with an object and releases it, it is marked as free and returned to its cache, thus making it immediately available for subsequent requests from the kernel.
The slab allocator first appeared in the Solaris 2.4 kernel. Because of its general-purpose nature, this allocator is now also used for certain user-mode memory requests in Solaris. Linux originally used the buddy system; however, beginning with Version 2.2, the Linux kernel adopted the slab allocator.
Recent distributions of Linux now include two other kernel memory allocators—the SLOB and SLUB allocators. (Linux refers to its slab implementation as SLAB.)
The SLOB allocator is designed for systems with a limited amount of memory, such as embedded systems. SLOB (which stands for Simple List of Blocks) works by maintaining three lists of objects: small (for objects less than 256 bytes), medium (for objects less than 1,024 bytes), and large (for objects less than 1,024 bytes). Memory requests are allocated from an object on an appropriately sized list using a first-fit policy.
Beginning with Version 2.6.24, the SLUB allocator replaced SLAB as the default allocator for the Linux kernel. SLUB addresses performance issues with slab allocation by reducing much of the overhead required by the SLAB allocator. One change is to move the metadata that is stored with each slab under SLAB allocation to the page structure the Linux kernel uses for each page. Additionally, SLUB removes the per-CPU queues that the SLAB allocator maintains for objects in each cache. For systems with a large number of processors, the amount of memory allocated to these queues was not insignificant. Thus, SLUB provides better performance as the number of processors on a system increases.
9.9 Other Considerations
The major decisions that we make for a paging system are the selections of a replacement algorithm and an allocation policy, which we discussed earlier in this chapter. There are many other considerations as well, and we discuss several of them here.
9.9.1 Prepaging
An obvious property of pure demand paging is the large number of page faults that occur when a process is started. This situation results from trying to get the initial locality into memory. The same situation may arise at other times. For instance, when a swapped-out process is restarted, all its pages are on the disk, and each must be brought in by its own page fault. Prepaging is an attempt to prevent this high level of initial paging. The strategy is to bring into memory at one time all the pages that will be needed. Some operating systems—notably Solaris—prepage the page frames for small files.
In a system using the working-set model, for example, we could keep with each process a list of the pages in its working set. If we must suspend a process (due to an I/O wait or a lack of free frames), we remember the working set for that process. When the process is to be resumed (because I/O has finished or enough free frames have become available), we automatically bring back into memory its entire working set before restarting the process.
Prepaging may offer an advantage in some cases. The question is simply whether the cost of using prepaging is less than the cost of servicing the corresponding page faults. It may well be the case that many of the pages brought back into memory by prepaging will not be used.
Assume that s pages are prepaged and a fraction α of these s pages is actually used (0 ≤ α ≤ 1). The question is whether the cost of the s * α saved page faults is greater or less than the cost of prepaging s * (1 − α) unnecessary pages. If α is close to 0, prepaging loses; if α is close to 1, prepaging wins.
9.9.2 Page Size
The designers of an operating system for an existing machine seldom have a choice concerning the page size. However, when new machines are being designed, a decision regarding the best page size must be made. As you might expect, there is no single best page size. Rather, there is a set of factors that support various sizes. Page sizes are invariably powers of 2, generally ranging from 4,096 (212) to 4,194,304 (222) bytes.
How do we select a page size? One concern is the size of the page table. For a given virtual memory space, decreasing the page size increases the number of pages and hence the size of the page table. For a virtual memory of 4 MB (222), for example, there would be 4,096 pages of 1,024 bytes but only 512 pages of 8,192 bytes. Because each active process must have its own copy of the page table, a large page size is desirable.
Memory is better utilized with smaller pages, however. If a process is allocated memory starting at location 00000 and continuing until it has as much as it needs, it probably will not end exactly on a page boundary. Thus, a part of the final page must be allocated (because pages are the units of allocation) but will be unused (creating internal fragmentation). Assuming independence of process size and page size, we can expect that, on the average, half of the final page of each process will be wasted. This loss is only 256 bytes for a page of 512 bytes but is 4,096 bytes for a page of 8,192 bytes. To minimize internal fragmentation, then, we need a small page size.
Another problem is the time required to read or write a page. I/O time is composed of seek, latency, and transfer times. Transfer time is proportional to the amount transferred (that is, the page size)—a fact that would seem to argue for a small page size. However, as we shall see in Section 10.1.1, latency and seek time normally dwarf transfer time. At a transfer rate of 2 MB per second, it takes only 0.2 milliseconds to transfer 512 bytes. Latency time, though, is perhaps 8 milliseconds, and seek time 20 milliseconds. Of the total I/O time (28.2 milliseconds), therefore, only 1 percent is attributable to the actual transfer. Doubling the page size increases I/O time to only 28.4 milliseconds. It takes 28.4 milliseconds to read a single page of 1,024 bytes but 56.4 milliseconds to read the same amount as two pages of 512 bytes each. Thus, a desire to minimize I/O time argues for a larger page size.
With a smaller page size, though, total I/O should be reduced, since locality will be improved. A smaller page size allows each page to match program locality more accurately. For example, consider a process 200 KB in size, of which only half (100 KB) is actually used in an execution. If we have only one large page, we must bring in the entire page, a total of 200 KB transferred and allocated. If instead we had pages of only 1 byte, then we could bring in only the 100 KB that are actually used, resulting in only 100 KB transferred and allocated. With a smaller page size, then, we have better resolution, allowing us to isolate only the memory that is actually needed. With a larger page size, we must allocate and transfer not only what is needed but also anything else that happens to be in the page, whether it is needed or not. Thus, a smaller page size should result in less I/O and less total allocated memory.
But did you notice that with a page size of 1 byte, we would have a page fault for each byte? A process of 200 KB that used only half of that memory would generate only one page fault with a page size of 200 KB but 102,400 page faults with a page size of 1 byte. Each page fault generates the large amount of overhead needed for processing the interrupt, saving registers, replacing a page, queueing for the paging device, and updating tables. To minimize the number of page faults, we need to have a large page size.
Other factors must be considered as well (such as the relationship between page size and sector size on the paging device). The problem has no best answer. As we have seen, some factors (internal fragmentation, locality) argue for a small page size, whereas others (table size, I/O time) argue for a large page size. Nevertheless, the historical trend is toward larger page sizes, even for mobile systems. Indeed, the first edition of Operating System Concepts (1983) used 4,096 bytes as the upper bound on page sizes, and this value was the most common page size in 1990. Modern systems may now use much larger page sizes, as we will see in the following section.
9.9.3 TLB Reach
In Chapter 8, we introduced the hit ratio of the TLB. Recall that the hit ratio for the TLB refers to the percentage of virtual address translations that are resolved in the TLB rather than the page table. Clearly, the hit ratio is related to the number of entries in the TLB, and the way to increase the hit ratio is by increasing the number of entries in the TLB. This, however, does not come cheaply, as the associative memory used to construct the TLB is both expensive and power hungry.
Related to the hit ratio is a similar metric: the TLB reach. The TLB reach refers to the amount of memory accessible from the TLB and is simply the number of entries multiplied by the page size. Ideally, the working set for a process is stored in the TLB. If it is not, the process will spend a considerable amount of time resolving memory references in the page table rather than the TLB. If we double the number of entries in the TLB, we double the TLB reach. However, for some memory-intensive applications, this may still prove insufficient for storing the working set.
Another approach for increasing the TLB reach is to either increase the size of the page or provide multiple page sizes. If we increase the page size—say, from 8 KB to 32 KB—we quadruple the TLB reach. However, this may lead to an increase in fragmentation for some applications that do not require such a large page size. Alternatively, an operating system may provide several different page sizes. For example, the UltraSPARC supports page sizes of 8 KB, 64 KB, 512 KB, and 4 MB. Of these available pages sizes, Solaris uses both 8-KB and 4-MB page sizes. And with a 64-entry TLB, the TLB reach for Solaris ranges from 512 KB with 8-KB pages to 256 MB with 4-MB pages. For the majority of applications, the 8-KB page size is sufficient, although Solaris maps the first 4MB of kernel code and data with two 4-MB pages. Solaris also allows applications—such as databases—to take advantage of the large 4-MB page size.
Providing support for multiple page sizes requires the operating system—not hardware—to manage the TLB. For example, one of the fields in a TLB entry must indicate the size of the page frame corresponding to the TLB entry. Managing the TLB in software and not hardware comes at a cost in performance. However, the increased hit ratio and TLB reach offset the performance costs. Indeed, recent trends indicate a move toward software-managed TLBs and operating-system support for multiple page sizes.
9.9.4 Inverted Page Tables
Section 8.6.3 introduced the concept of the inverted page table. The purpose of this form of page management is to reduce the amount of physical memory needed to track virtual-to-physical address translations. We accomplish this savings by creating a table that has one entry per page of physical memory, indexed by the pair <process-id, page-number>.
Because they keep information about which virtual memory page is stored in each physical frame, inverted page tables reduce the amount of physical memory needed to store this information. However, the inverted page table no longer contains complete information about the logical address space of a process, and that information is required if a referenced page is not currently in memory. Demand paging requires this information to process page faults. For the information to be available, an external page table (one per process) must be kept. Each such table looks like the traditional per-process page table and contains information on where each virtual page is located.
But do external page tables negate the utility of inverted page tables? Since these tables are referenced only when a page fault occurs, they do not need to be available quickly. Instead, they are themselves paged in and out of memory as necessary. Unfortunately, a page fault may now cause the virtual memory manager to generate another page fault as it pages in the external page table it needs to locate the virtual page on the backing store. This special case requires careful handling in the kernel and a delay in the page-lookup processing.
9.9.5 Program Structure
Demand paging is designed to be transparent to the user program. In many cases, the user is completely unaware of the paged nature of memory. In other cases, however, system performance can be improved if the user (or compiler) has an awareness of the underlying demand paging.
Let's look at a contrived but informative example. Assume that pages are 128 words in size. Consider a C program whose function is to initialize to 0 each element of a 128-by-128 array. The following code is typical:
int i, j;
int[128][128] data;
for (j = 0; j < 128; j++)
for (i = 0; i < 128; i++)
data[i][j] = 0;
Notice that the array is stored row major; that is, the array is stored data[0][0], data[0][1], · · ·, data[0][127], data[1][0], data[1][1], · · ·, data[127][127]. For pages of 128 words, each row takes one page. Thus, the preceding code zeros one word in each page, then another word in each page, and so on. If the operating system allocates fewer than 128 frames to the entire program, then its execution will result in 128 × 128 = 16,384 page faults. In contrast, suppose we change the code to
int i, j;
int[128][128] data;
for (i = 0; i < 128; i++)
for (j = 0; j < 128; j++)
data[i][j] = 0;
This code zeros all the words on one page before starting the next page, reducing the number of page faults to 128.
Careful selection of data structures and programming structures can increase locality and hence lower the page-fault rate and the number of pages in the working set. For example, a stack has good locality, since access is always made to the top. A hash table, in contrast, is designed to scatter references, producing bad locality. Of course, locality of reference is just one measure of the efficiency of the use of a data structure. Other heavily weighted factors include search speed, total number of memory references, and total number of pages touched.
At a later stage, the compiler and loader can have a significant effect on paging. Separating code and data and generating reentrant code means that code pages can be read-only and hence will never be modified. Clean pages do not have to be paged out to be replaced. The loader can avoid placing routines across page boundaries, keeping each routine completely in one page. Routines that call each other many times can be packed into the same page. This packaging is a variant of the bin-packing problem of operations research: try to pack the variable-sized load segments into the fixed-sized pages so that interpage references are minimized. Such an approach is particularly useful for large page sizes.
9.9.6 I/O Interlock and Page Locking
When demand paging is used, we sometimes need to allow some of the pages to be locked in memory. One such situation occurs when I/O is done to or from user (virtual) memory. I/O is often implemented by a separate I/O processor. For example, a controller for a USB storage device is generally given the number of bytes to transfer and a memory address for the buffer (Figure 9.28). When the transfer is complete, the CPU is interrupted.
We must be sure the following sequence of events does not occur: A process issues an I/O request and is put in a queue for that I/O device. Meanwhile, the CPU is given to other processes. These processes cause page faults, and one of them, using a global replacement algorithm, replaces the page containing the memory buffer for the waiting process. The pages are paged out. Some time later, when the I/O request advances to the head of the device queue, the I/O occurs to the specified address. However, this frame is now being used for a different page belonging to another process.
There are two common solutions to this problem. One solution is never to execute I/O to user memory. Instead, data are always copied between system memory and user memory. I/O takes place only between system memory and the I/O device. To write a block on tape, we first copy the block to system memory and then write it to tape. This extra copying may result in unacceptably high overhead.
Another solution is to allow pages to be locked into memory. Here, a lock bit is associated with every frame. If the frame is locked, it cannot be selected for replacement. Under this approach, to write a block on tape, we lock into memory the pages containing the block. The system can then continue as usual. Locked pages cannot be replaced. When the I/O is complete, the pages are unlocked.
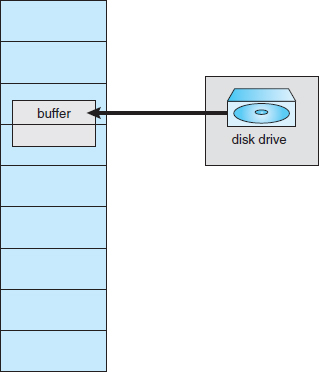
Figure 9.28 The reason why frames used for I/O must be in memory.
Lock bits are used in various situations. Frequently, some or all of the operating-system kernel is locked into memory. Many operating systems cannot tolerate a page fault caused by the kernel or by a specific kernel module, including the one performing memory management. User processes may also need to lock pages into memory. A database process may want to manage a chunk of memory, for example, moving blocks between disk and memory itself because it has the best knowledge of how it is going to use its data. Such pinning of pages in memory is fairly common, and most operating systems have a system call allowing an application to request that a region of its logical address space be pinned. Note that this feature could be abused and could cause stress on the memory-management algorithms. Therefore, an application frequently requires special privileges to make such a request.
Another use for a lock bit involves normal page replacement. Consider the following sequence of events: A low-priority process faults. Selecting a replacement frame, the paging system reads the necessary page into memory. Ready to continue, the low-priority process enters the ready queue and waits for the CPU. Since it is a low-priority process, it may not be selected by the CPU scheduler for a time. While the low-priority process waits, a high-priority process faults. Looking for a replacement, the paging system sees a page that is in memory but has not been referenced or modified: it is the page that the low-priority process just brought in. This page looks like a perfect replacement: it is clean and will not need to be written out, and it apparently has not been used for a long time.
Whether the high-priority process should be able to replace the low-priority process is a policy decision. After all, we are simply delaying the low-priority process for the benefit of the high-priority process. However, we are wasting the effort spent to bring in the page for the low-priority process. If we decide to prevent replacement of a newly brought-in page until it can be used at least once, then we can use the lock bit to implement this mechanism. When a page is selected for replacement, its lock bit is turned on. It remains on until the faulting process is again dispatched.
Using a lock bit can be dangerous: the lock bit may get turned on but never turned off. Should this situation occur (because of a bug in the operating system, for example), the locked frame becomes unusable. On a single-user system, the overuse of locking would hurt only the user doing the locking. Multiuser systems must be less trusting of users. For instance, Solaris allows locking “hints,” but it is free to disregard these hints if the free-frame pool becomes too small or if an individual process requests that too many pages be locked in memory.
9.10 Operating-System Examples
In this section, we describe how Windows and Solaris implement virtual memory.
9.10.1 Windows
Windows implements virtual memory using demand paging with clustering. Clustering handles page faults by bringing in not only the faulting page but also several pages following the faulting page. When a process is first created, it is assigned a working-set minimum and maximum. The working-set minimum is the minimum number of pages the process is guaranteed to have in memory. If sufficient memory is available, a process may be assigned as many pages as its working-set maximum. (In some circumstances, a process may be allowed to exceed its working-set maximum.) The virtual memory manager maintains a list of free page frames. Associated with this list is a threshold value that is used to indicate whether sufficient free memory is available. If a page fault occurs for a process that is below its working-set maximum, the virtual memory manager allocates a page from this list of free pages. If a process that is at its working-set maximum incurs a page fault, it must select a page for replacement using a local LRU page-replacement policy.
When the amount of free memory falls below the threshold, the virtual memory manager uses a tactic known as automatic working-set trimming to restore the value above the threshold. Automatic working-set trimming works by evaluating the number of pages allocated to processes. If a process has been allocated more pages than its working-set minimum, the virtual memory manager removes pages until the process reaches its working-set minimum. A process that is at its working-set minimum may be allocated pages from the free-page-frame list once sufficient free memory is available. Windows performs working-set trimming on both user mode and system processes.
Virtual memory is discussed in great detail in the Windows case study in Chapter 19.
9.10.2 Solaris
In Solaris, when a thread incurs a page fault, the kernel assigns a page to the faulting thread from the list of free pages it maintains. Therefore, it is imperative that the kernel keep a sufficient amount of free memory available. Associated with this list of free pages is a parameter—lotsfree—that represents a threshold to begin paging. The lotsfree parameter is typically set to 1/64 the size of the physical memory. Four times per second, the kernel checks whether the amount of free memory is less than lotsfree. If the number of free pages falls below lotsfree, a process known as a pageout starts up. The pageout process is similar to the second-chance algorithm described in Section 9.4.5.2, except that it uses two hands while scanning pages, rather than one.
The pageout process works as follows: The front hand of the clock scans all pages in memory, setting the reference bit to 0. Later, the back hand of the clock examines the reference bit for the pages in memory, appending each page whose reference bit is still set to 0 to the free list and writing to disk its contents if modified. Solaris maintains a cache list of pages that have been “freed” but have not yet been overwritten. The free list contains frames that have invalid contents. Pages can be reclaimed from the cache list if they are accessed before being moved to the free list.
The pageout algorithm uses several parameters to control the rate at which pages are scanned (known as the scanrate). The scanrate is expressed in pages per second and ranges from slowscan to fastscan. When free memory falls below lotsfree, scanning occurs at slowscan pages per second and progresses to fastscan, depending on the amount of free memory available. The default value of slowscan is 100 pages per second. Fastscan is typically set to the value (total physical pages)/2 pages per second, with a maximum of 8,192 pages per second. This is shown in Figure 9.29 (with fastscan set to the maximum).
The distance (in pages) between the hands of the clock is determined by a system parameter, handspread. The amount of time between the front hand's clearing a bit and the back hand's investigating its value depends on the scanrate and the handspread. If scanrate is 100 pages per second and handspread is 1,024 pages, 10 seconds can pass between the time a bit is set by the front hand and the time it is checked by the back hand. However, because of the demands placed on the memory system, a scanrate of several thousand is not uncommon. This means that the amount of time between clearing and investigating a bit is often a few seconds.
As mentioned above, the pageout process checks memory four times per second. However, if free memory falls below the value of desfree (Figure 9.29), pageout will run a hundred times per second with the intention of keeping at least desfree free memory available. If the pageout process is unable to keep the amount of free memory at desfree for a 30-second average, the kernel begins swapping processes, thereby freeing all pages allocated to swapped processes. In general, the kernel looks for processes that have been idle for long periods of time. If the system is unable to maintain the amount of free memory at minfree, the pageout process is called for every request for a new page.
Recent releases of the Solaris kernel have provided enhancements of the paging algorithm. One such enhancement involves recognizing pages from shared libraries. Pages belonging to libraries that are being shared by several processes—even if they are eligible to be claimed by the scanner—are skipped during the page-scanning process. Another enhancement concerns distinguishing pages that have been allocated to processes from pages allocated to regular files. This is known as priority paging and is covered in Section 12.6.2.
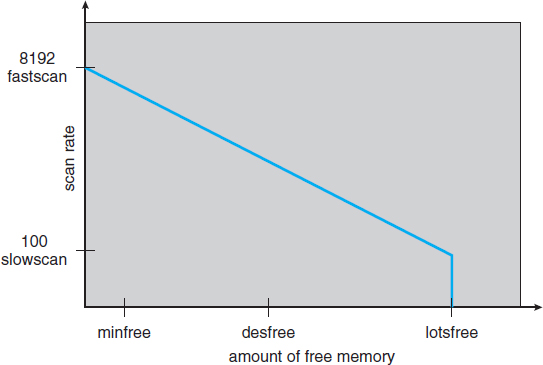
Figure 9.29 Solaris page scanner.
9.11 Summary
It is desirable to be able to execute a process whose logical address space is larger than the available physical address space. Virtual memory is a technique that enables us to map a large logical address space onto a smaller physical memory. Virtual memory allows us to run extremely large processes and to raise the degree of multiprogramming, increasing CPU utilization. Further, it frees application programmers from worrying about memory availability. In addition, with virtual memory, several processes can share system libraries and memory. With virtual memory, we can also use an efficient type of process creation known as copy-on-write, wherein parent and child processes share actual pages of memory.
Virtual memory is commonly implemented by demand paging. Pure demand paging never brings in a page until that page is referenced. The first reference causes a page fault to the operating system. The operating-system kernel consults an internal table to determine where the page is located on the backing store. It then finds a free frame and reads the page in from the backing store. The page table is updated to reflect this change, and the instruction that caused the page fault is restarted. This approach allows a process to run even though its entire memory image is not in main memory at once. As long as the page-fault rate is reasonably low, performance is acceptable.
We can use demand paging to reduce the number of frames allocated to a process. This arrangement can increase the degree of multiprogramming (allowing more processes to be available for execution at one time) and—in theory, at least—the CPU utilization of the system. It also allows processes to be run even though their memory requirements exceed the total available physical memory. Such processes run in virtual memory.
If total memory requirements exceed the capacity of physical memory, then it may be necessary to replace pages from memory to free frames for new pages. Various page-replacement algorithms are used. FIFO page replacement is easy to program but suffers from Belady's anomaly. Optimal page replacement requires future knowledge. LRU replacement is an approximation of optimal page replacement, but even it may be difficult to implement. Most page-replacement algorithms, such as the second-chance algorithm, are approximations of LRU replacement.
In addition to a page-replacement algorithm, a frame-allocation policy is needed. Allocation can be fixed, suggesting local page replacement, or dynamic, suggesting global replacement. The working-set model assumes that processes execute in localities. The working set is the set of pages in the current locality. Accordingly, each process should be allocated enough frames for its current working set. If a process does not have enough memory for its working set, it will thrash. Providing enough frames to each process to avoid thrashing may require process swapping and scheduling.
Most operating systems provide features for memory mapping files, thus allowing file I/O to be treated as routine memory access. The Win32 API implements shared memory through memory mapping of files.
Kernel processes typically require memory to be allocated using pages that are physically contiguous. The buddy system allocates memory to kernel processes in units sized according to a power of 2, which often results in fragmentation. Slab allocators assign kernel data structures to caches associated with slabs, which are made up of one or more physically contiguous pages. With slab allocation, no memory is wasted due to fragmentation, and memory requests can be satisfied quickly.
In addition to requiring us to solve the major problems of page replacement and frame allocation, the proper design of a paging system requires that we consider prepaging, page size, TLB reach, inverted page tables, program structure, I/O interlock and page locking, and other issues.
Practice Exercises
9.1 Under what circumstances do page faults occur? Describe the actions taken by the operating system when a page fault occurs.
9.2 Assume that you have a page-reference string for a process with m frames (initially all empty). The page-reference string has length p, and n distinct page numbers occur in it. Answer these questions for any page-replacement algorithms:
- What is a lower bound on the number of page faults?
- What is an upper bound on the number of page faults?
9.3 Consider the page table shown in Figure 9.30 for a system with 12-bit virtual and physical addresses and with 256-byte pages. The list of free page frames is D, E, F (that is, D is at the head of the list, E is second, and F is last).

Figure 9.30 Page table for Exercise 9.3.
Convert the following virtual addresses to their equivalent physical addresses in hexadecimal. All numbers are given in hexadecimal. (A dash for a page frame indicates that the page is not in memory.)
- 9EF
- 111
- 700
- 0FF
9.4 Consider the following page-replacement algorithms. Rank these algorithms on a five-point scale from “bad” to “perfect” according to their page-fault rate. Separate those algorithms that suffer from Belady's anomaly from those that do not.
- LRU replacement
- FIFO replacement
- Optimal replacement
- Second-chance replacement
9.5 Discuss the hardware support required to support demand paging.
9.6 An operating system supports a paged virtual memory. The central processor has a cycle time of 1 microsecond. It costs an additional 1 microsecond to access a page other than the current one. Pages have 1,000 words, and the paging device is a drum that rotates at 3,000 revolutions per minute and transfers 1 million words per second. The following statistical measurements were obtained from the system:
- One percent of all instructions executed accessed a page other than the current page.
- Of the instructions that accessed another page, 80 percent accessed a page already in memory.
- When a new page was required, the replaced page was modified 50 percent of the time.
Calculate the effective instruction time on this system, assuming that the system is running one process only and that the processor is idle during drum transfers.
9.7 Consider the two-dimensional array A:
int A[][] = new int[100][100];
where A[0][0] is at location 200 in a paged memory system with pages of size 200. A small process that manipulates the matrix resides in page 0 (locations 0 to 199). Thus, every instruction fetch will be from page 0.
For three page frames, how many page faults are generated by the following array-initialization loops? Use LRU replacement, and assume that page frame 1 contains the process and the other two are initially empty.
-
for (int j = 0; j < 100; j++) for (int i = 0; i < 100; i++) A[i][j] = 0; -
for (int i = 0; i < 100; i++) for (int j = 0; j < 100; j++) A[i][j] = 0;
9.8 Consider the following page reference string:
1, 2, 3, 4, 2, 1, 5, 6, 2, 1, 2, 3, 7, 6, 3, 2, 1, 2, 3, 6.
How many page faults would occur for the following replacement algorithms, assuming one, two, three, four, five, six, and seven frames? Remember that all frames are initially empty, so your first unique pages will cost one fault each.
- LRU replacement
- FIFO replacement
- Optimal replacement
9.9 Suppose that you want to use a paging algorithm that requires a reference bit (such as second-chance replacement or working-set model), but the hardware does not provide one. Sketch how you could simulate a reference bit even if one were not provided by the hardware, or explain why it is not possible to do so. If it is possible, calculate what the cost would be.
9.10 You have devised a new page-replacement algorithm that you think may be optimal. In some contorted test cases, Belady's anomaly occurs. Is the new algorithm optimal? Explain your answer.
9.11 Segmentation is similar to paging but uses variable-sized “pages.” Define two segment-replacement algorithms, one based on the FIFO page-replacement scheme and the other on the LRU page-replacement scheme. Remember that since segments are not the same size, the segment that is chosen for replacement may be too small to leave enough consecutive locations for the needed segment. Consider strategies for systems where segments cannot be relocated and strategies for systems where they can.
9.12 Consider a demand-paged computer system where the degree of multiprogramming is currently fixed at four. The system was recently measured to determine utilization of the CPU and the paging disk. Three alternative results are shown below. For each case, what is happening? Can the degree of multiprogramming be increased to increase the CPU utilization? Is the paging helping?
- CPU utilization 13 percent; disk utilization 97 percent
- CPU utilization 87 percent; disk utilization 3 percent
- CPU utilization 13 percent; disk utilization 3 percent
9.13 We have an operating system for a machine that uses base and limit registers, but we have modified the machine to provide a page table. Can the page tables be set up to simulate base and limit registers? How can they be, or why can they not be?
Exercises
9.14 Assume that a program has just referenced an address in virtual memory. Describe a scenario in which each of the following can occur. (If no such scenario can occur, explain why.)
- TLB miss with no page fault
- TLB miss and page fault
- TLB hit and no page fault
- TLB hit and page fault
9.15 A simplified view of thread states is Ready, Running, and Blocked, where a thread is either ready and waiting to be scheduled, is running on the processor, or is blocked (for example, waiting for I/O). This is illustrated in Figure 9.31. Assuming a thread is in the Running state, answer the following questions, and explain your answer:
- Will the thread change state if it incurs a page fault? If so, to what state will it change?
- Will the thread change state if it generates a TLB miss that is resolved in the page table? If so, to what state will it change?
- Will the thread change state if an address reference is resolved in the page table? If so, to what state will it change?
9.16 Consider a system that uses pure demand paging.
- When a process first starts execution, how would you characterize the page-fault rate?
- Once the working set for a process is loaded into memory, how would you characterize the page-fault rate?
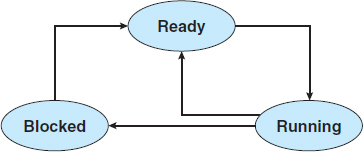
- Assume that a process changes its locality and the size of the new working set is too large to be stored in available free memory. Identify some options system designers could choose from to handle this situation.
9.17 What is the copy-on-write feature, and under what circumstances is its use beneficial? What hardware support is required to implement this feature?
9.18 A certain computer provides its users with a virtual memory space of 232 bytes. The computer has 222 bytes of physical memory. The virtual memory is implemented by paging, and the page size is 4,096 bytes. A user process generates the virtual address 11123456. Explain how the system establishes the corresponding physical location. Distinguish between software and hardware operations.
9.19 Assume that we have a demand-paged memory. The page table is held in registers. It takes 8 milliseconds to service a page fault if an empty frame is available or if the replaced page is not modified and 20 milliseconds if the replaced page is modified. Memory-access time is 100 nanoseconds.
Assume that the page to be replaced is modified 70 percent of the time. What is the maximum acceptable page-fault rate for an effective access time of no more than 200 nanoseconds?
9.20 When a page fault occurs, the process requesting the page must block while waiting for the page to be brought from disk into physical memory. Assume that there exists a process with five user-level threads and that the mapping of user threads to kernel threads is one to one. If one user thread incurs a page fault while accessing its stack, would the other user threads belonging to the same process also be affected by the page fault—that is, would they also have to wait for the faulting page to be brought into memory? Explain.
9.21 Consider the following page reference string:
7, 2, 3, 1, 2, 5, 3, 4, 6, 7, 7, 1, 0, 5, 4, 6, 2, 3, 0, 1.
Assuming demand paging with three frames, how many page faults would occur for the following replacement algorithms?
- LRU replacement
- FIFO replacement
- Optimal replacement
9.22 The page table shown in Figure 9.32 is for a system with 16-bit virtual and physical addresses and with 4,096-byte pages. The reference bit is set to 1 when the page has been referenced. Periodically, a thread zeroes out all values of the reference bit. A dash for a page frame indicates the page is not in memory. The page-replacement algorithm is localized LRU, and all numbers are provided in decimal.
- Convert the following virtual addresses (in hexadecimal) to the equivalent physical addresses. You may provide answers in either hexadecimal or decimal. Also set the reference bit for the appropriate entry in the page table.
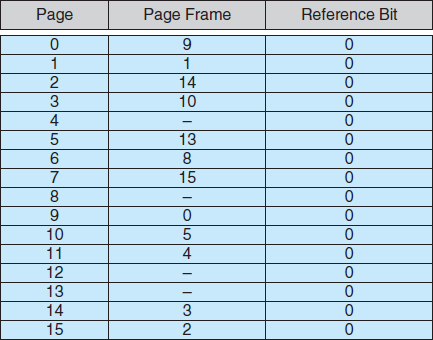
Figure 9.32 Page table for Exercise 9.22.
- 0xE12C
- 0x3A9D
- 0xA9D9
- 0x7001
- 0xACA1
- Using the above addresses as a guide, provide an example of a logical address (in hexadecimal) that results in a page fault.
- From what set of page frames will the LRU page-replacement algorithm choose in resolving a page fault?
9.23 Assume that you are monitoring the rate at which the pointer in the clock algorithm moves. (The pointer indicates the candidate page for replacement.) What can you say about the system if you notice the following behavior:
- Pointer is moving fast.
- Pointer is moving slow.
9.24 Discuss situations in which the least frequently used (LFU) page-replacement algorithm generates fewer page faults than the least recently used (LRU) page-replacement algorithm. Also discuss under what circumstances the opposite holds.
9.25 Discuss situations in which the most frequently used (MFU) page-replacement algorithm generates fewer page faults than the least recently used (LRU) page-replacement algorithm. Also discuss under what circumstances the opposite holds.
9.26 The VAX/VMS system uses a FIFO replacement algorithm for resident pages and a free-frame pool of recently used pages. Assume that the free-frame pool is managed using the LRU replacement policy. Answer the following questions:
- If a page fault occurs and the page does not exist in the free-frame pool, how is free space generated for the newly requested page?
- If a page fault occurs and the page exists in the free-frame pool, how is the resident page set and the free-frame pool managed to make space for the requested page?
- What does the system degenerate to if the number of resident pages is set to one?
- What does the system degenerate to if the number of pages in the free-frame pool is zero?
9.27 Consider a demand-paging system with the following time-measured utilizations:
| CPU utilization | 20% |
| Paging disk | 97.7% |
| Other I/O devices | 5% |
For each of the following, indicate whether it will (or is likely to) improve CPU utilization. Explain your answers.
- Install a faster CPU.
- Install a bigger paging disk.
- Increase the degree of multiprogramming.
- Decrease the degree of multiprogramming.
- Install more main memory.
- Install a faster hard disk or multiple controllers with multiple hard disks.
- Add prepaging to the page-fetch algorithms.
- Increase the page size.
9.28 Suppose that a machine provides instructions that can access memory locations using the one-level indirect addressing scheme. What sequence of page faults is incurred when all of the pages of a program are currently nonresident and the first instruction of the program is an indirect memory-load operation? What happens when the operating system is using a per-process frame allocation technique and only two pages are allocated to this process?
9.29 Suppose that your replacement policy (in a paged system) is to examine each page regularly and to discard that page if it has not been used since the last examination. What would you gain and what would you lose by using this policy rather than LRU or second-chance replacement?
9.30 A page-replacement algorithm should minimize the number of page faults. We can achieve this minimization by distributing heavily used pages evenly over all of memory, rather than having them compete for a small number of page frames. We can associate with each page frame a counter of the number of pages associated with that frame. Then, to replace a page, we can search for the page frame with the smallest counter.
- Define a page-replacement algorithm using this basic idea. Specifically address these problems:
- What is the initial value of the counters?
- When are counters increased?
- When are counters decreased?
- How is the page to be replaced selected?
- How many page faults occur for your algorithm for the following reference string with four page frames?
1, 2, 3, 4, 5, 3, 4, 1, 6, 7, 8, 7, 8, 9, 7, 8, 9, 5, 4, 5, 4, 2.
- What is the minimum number of page faults for an optimal page-replacement strategy for the reference string in part b with four page frames?
9.31 Consider a demand-paging system with a paging disk that has an average access and transfer time of 20 milliseconds. Addresses are translated through a page table in main memory, with an access time of 1 microsecond per memory access. Thus, each memory reference through the page table takes two accesses. To improve this time, we have added an associative memory that reduces access time to one memory reference if the page-table entry is in the associative memory.
Assume that 80 percent of the accesses are in the associative memory and that, of those remaining, 10 percent (or 2 percent of the total) cause page faults. What is the effective memory access time?
9.32 What is the cause of thrashing? How does the system detect thrashing? Once it detects thrashing, what can the system do to eliminate this problem?
9.33 Is it possible for a process to have two working sets, one representing data and another representing code? Explain.
9.34 Consider the parameter Δ used to define the working-set window in the working-set model. When Δ is set to a small value, what is the effect on the page-fault frequency and the number of active (nonsuspended) processes currently executing in the system? What is the effect when Δ is set to a very high value?
9.35 In a 1,024-KB segment, memory is allocated using the buddy system. Using Figure 9.26 as a guide, draw a tree illustrating how the following memory requests are allocated:
Next, modify the tree for the following releases of memory. Perform coalescing whenever possible:
- Release 250 bytes
- Release 900 bytes
- Release 1,500 bytes
9.36 A system provides support for user-level and kernel-level threads. The mapping in this system is one to one (there is a corresponding kernel thread for each user thread). Does a multithreaded process consist of (a) a working set for the entire process or (b) a working set for each thread? Explain
9.37 The slab-allocation algorithm uses a separate cache for each different object type. Assuming there is one cache per object type, explain why this scheme doesn't scale well with multiple CPUs. What could be done to address this scalability issue?
9.38 Consider a system that allocates pages of different sizes to its processes. What are the advantages of such a paging scheme? What modifications to the virtual memory system provide this functionality?
Programming Problems
9.39 Write a program that implements the FIFO, LRU, and optimal page-replacement algorithms presented in this chapter. First, generate a random page-reference string where page numbers range from 0 to 9. Apply the random page-reference string to each algorithm, and record the number of page faults incurred by each algorithm. Implement the replacement algorithms so that the number of page frames can vary from 1 to 7. Assume that demand paging is used.
9.40 Repeat Exercise 3.22, this time using Windows shared memory. In particular, using the producer—consumer strategy, design two programs that communicate with shared memory using the Windows API as outlined in Section 9.7.2. The producer will generate the numbers specified in the Collatz conjecture and write them to a shared memory object. The consumer will then read and output the sequence of numbers from shared memory.
In this instance, the producer will be passed an integer parameter on the command line specifying how many numbers to produce (for example, providing 5 on the command line means the producer process will generate the first five numbers).
Programming Projects
Designing a Virtual Memory Manager
This project consists of writing a program that translates logical to physical addresses for a virtual address space of size 216 = 65,536 bytes. Your program will read from a file containing logical addresses and, using a TLB as well as a page table, will translate each logical address to its corresponding physical address and output the value of the byte stored at the translated physical address. The goal behind this project is to simulate the steps involved in translating logical to physical addresses.
Specifics
Your program will read a file containing several 32-bit integer numbers that represent logical addresses. However, you need only be concerned with 16-bit addresses, so you must mask the rightmost 16 bits of each logical address. These 16 bits are divided into (1) an 8-bit page number and (2) 8-bit page offset. Hence, the addresses are structured as shown in Figure 9.33.
Other specifics include the following:
- 28 entries in the page table
- Page size of 28 bytes
- 16 entries in the TLB
- Frame size of 28 bytes
- 256 frames
- Physical memory of 65,536 bytes (256 frames × 256-byte frame size)
Additionally, your program need only be concerned with reading logical addresses and translating them to their corresponding physical addresses. You do not need to support writing to the logical address space.
Address Translation
Your program will translate logical to physical addresses using a TLB and page table as outlined in Section 8.5. First, the page number is extracted from the logical address, and the TLB is consulted. In the case of a TLB-hit, the frame number is obtained from the TLB. In the case of a TLB-miss, the page table must be consulted. In the latter case, either the frame number is obtained from the page table or a page fault occurs. A visual representation of the address-translation process appears in Figure 9.34.

Figure 9.33 Address structure.
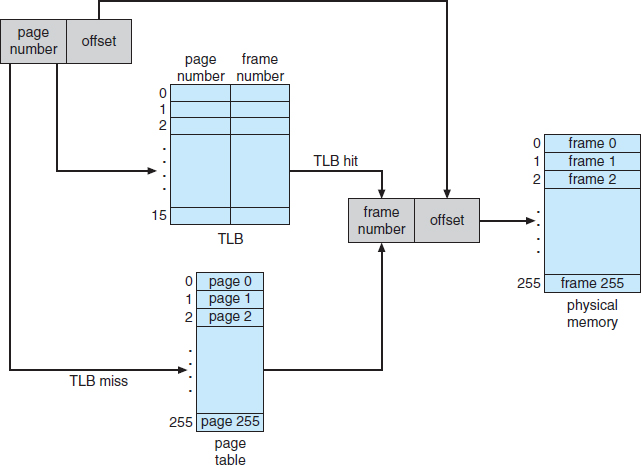
Figure 9.34 A representation of the address-translation process.
Handling Page Faults
Your program will implement demand paging as described in Section 9.2. The backing store is represented by the file BACKING_STORE.bin, a binary file of size 65,536 bytes. When a page fault occurs, you will read in a 256-byte page from the file BACKING_STORE and store it in an available page frame in physical memory. For example, if a logical address with page number 15 resulted in a page fault, your program would read in page 15 from BACKING_STORE (remember that pages begin at 0 and are 256 bytes in size) and store it in a page frame in physical memory. Once this frame is stored (and the page table and TLB are updated), subsequent accesses to page 15 will be resolved by either the TLB or the page table.
You will need to treat BACKING_STORE.bin as a random-access file so that you can randomly seek to certain positions of the file for reading. We suggest using the standard C library functions for performing I/O, including fopen(), fread(), fseek(), and fclose().
The size of physical memory is the same as the size of the virtual address space—65,536 bytes—so you do not need to be concerned about page replacements during a page fault. Later, we describe a modification to this project using a smaller amount of physical memory; at that point, a page-replacement strategy will be required.
We provide the file addresses.txt, which contains integer values representing logical addresses ranging from 0 − 65535 (the size of the virtual address space). Your program will open this file, read each logical address and translate it to its corresponding physical address, and output the value of the signed byte at the physical address.
How to Begin
First, write a simple program that extracts the page number and offset (based on Figure 9.33) from the following integer numbers:
1, 256, 32768, 32769, 128, 65534, 33153
Perhaps the easiest way to do this is by using the operators for bit-masking and bit-shifting. Once you can correctly establish the page number and offset from an integer number, you are ready to begin.
Initially, we suggest that you bypass the TLB and use only a page table. You can integrate the TLB once your page table is working properly. Remember, address translation can work without a TLB; the TLB just makes it faster. When you are ready to implement the TLB, recall that it has only 16 entries, so you will need to use a replacement strategy when you update a full TLB. You may use either a FIFO or an LRU policy for updating your TLB.
How to Run Your Program
Your program should run as follows:
./a.out addresses.txt
Your program will read in the file addresses.txt, which contains 1,000 logical addresses ranging from 0 to 65535. Your program is to translate each logical address to a physical address and determine the contents of the signed byte stored at the correct physical address. (Recall that in the C language, the char data type occupies a byte of storage, so we suggest using char values.)
Your program is to output the following values:
- The logical address being translated (the integer value being read from addresses.txt).
- The corresponding physical address (what your program translates the logical address to).
- The signed byte value stored at the translated physical address.
We also provide the file correct.txt, which contains the correct output values for the file addresses.txt. You should use this file to determine if your program is correctly translating logical to physical addresses.
Statistics
After completion, your program is to report the following statistics:
- Page-fault rate—The percentage of address references that resulted in page faults.
- TLB hit rate—The percentage of address references that were resolved in the TLB.
Since the logical addresses in addresses.txt were generated randomly and do not reflect any memory access locality, do not expect to have a high TLB hit rate.
Modifications
This project assumes that physical memory is the same size as the virtual address space. In practice, physical memory is typically much smaller than a virtual address space. A suggested modification is to use a smaller physical address space. We recommend using 128 page frames rather than 256. This change will require modifying your program so that it keeps track of free page frames as well as implementing a page-replacement policy using either FIFO or LRU (Section 9.4).
Bibliographical Notes
Demand paging was first used in the Atlas system, implemented on the Manchester University MUSE computer around 1960 ([Kilburn et al. (1961)]). Another early demand-paging system was MULTICS, implemented on the GE 645 system ([Organick (1972)]). Virtual memory was added to Unix in 1979 [Babaoglu and Joy (1981)]
[Belady et al. (1969)] were the first researchers to observe that the FIFO replacement strategy may produce the anomaly that bears Belady's name. [Mattson et al. (1970)] demonstrated that stack algorithms are not subject to Belady's anomaly.
The optimal replacement algorithm was presented by [Belady (1966)] and was proved to be optimal by [Mattson et al. (1970)]. Belady's optimal algorithm is for a fixed allocation; [Prieve and Fabry (1976)] presented an optimal algorithm for situations in which the allocation can vary.
The enhanced clock algorithm was discussed by [Carr and Hennessy (1981)].
The working-set model was developed by [Denning (1968)]. Discussions concerning the working-set model were presented by [Denning (1980)].
The scheme for monitoring the page-fault rate was developed by [Wulf (1969)], who successfully applied this technique to the Burroughs B5500 computer system.
Buddy system memory allocators were described in [Knowlton (1965)], [Peterson and Norman (1977)], and [Purdom, Jr. and Stigler (1970)]. [Bonwick (1994)] discussed the slab allocator, and [Bonwick and Adams (2001)] extended the discussion to multiple processors. Other memory-fitting algorithms can be found in [Stephenson (1983)], [Bays (1977)], and [Brent (1989)]. A survey of memory-allocation strategies can be found in [Wilson et al. (1995)].
[Solomon and Russinovich (2000)] and [Russinovich and Solomon (2005)] described how Windows implements virtual memory. [McDougall and Mauro (2007)] discussed virtual memory in Solaris. Virtual memory techniques in Linux and FreeBSD were described by [Love (2010)] and [McKusick and Neville-Neil (2005)], respectively. [Ganapathy and Schimmel (1998)] and [Navarro et al. (2002)] discussed operating system support for multiple page sizes.
Bibliography
[Babaoglu and Joy (1981)] O. Babaoglu and W. Joy, “Converting a Swap-Based System to Do Paging in an Architecture Lacking Page-Reference Bits”, Proceedings of the ACM Symposium on Operating Systems Principles (1981), pages 78–86.
[Bays (1977)] C. Bays, “A Comparison of Next-Fit, First-Fit and Best-Fit”, Communications of the ACM, Volume 20, Number 3 (1977), pages 191–192.
[Belady (1966)] L. A. Belady, “A Study of Replacement Algorithms for a Virtual-Storage Computer”, IBM Systems Journal, Volume 5, Number 2 (1966), pages 78–101.
[Belady et al. (1969)] L. A. Belady, R. A. Nelson, andG. S. Shedler, “An Anomaly in Space-Time Characteristics of Certain Programs Running in a Paging Machine”, Communications of the ACM, Volume 12, Number 6 (1969), pages 349–353.
[Bonwick (1994)] J. Bonwick, “The Slab Allocator: An Object-Caching Kernel Memory Allocator”, USENIX Summer (1994), pages 87–98.
[Bonwick and Adams (2001)] J. Bonwick and J. Adams, “Magazines and Vmem: Extending the Slab Allocator to Many CPUs and Arbitrary Resources”, Proceedings of the 2001 USENIX Annual Technical Conference (2001).
[Brent (1989)] R. Brent, “Efficient Implementation of the First-Fit Strategy for Dynamic Storage Allocation”, ACM Transactions on Programming Languages and Systems, Volume 11, Number 3 (1989), pages 388–403.
[Carr and Hennessy (1981)] W. R. Carr and J. L. Hennessy, “WSClock—A Simple and Effective Algorithm for Virtual Memory Management”, Proceedings of the ACM Symposium on Operating Systems Principles (1981), pages 87–95.
[Denning (1968)] P. J. Denning, “The Working Set Model for Program Behavior”, Communications of the ACM, Volume 11, Number 5 (1968), pages 323–333.
[Denning (1980)] P. J. Denning, “Working Sets Past and Present”, IEEE Transactions on Software Engineering, Volume SE-6, Number 1 (1980), pages 64–84.
[Ganapathy and Schimmel (1998)] N. Ganapathy and C. Schimmel, “General Purpose Operating System Support for Multiple Page Sizes”, Proceedings of the USENIX Technical Conference (1998).
[Kilburn et al. (1961)] T. Kilburn, D. J. Howarth, R. B. Payne, and F. H. Sumner, “The Manchester University Atlas Operating System, Part I: Internal Organization”, Computer Journal, Volume 4, Number 3 (1961), pages 222–225.
[Knowlton (1965)] K. C. Knowlton, “A Fast Storage Allocator”, Communications of the ACM, Volume 8, Number 10 (1965), pages 623–624.
[Love (2010)] R. Love, Linux Kernel Development, Third Edition, Developer's Library (2010).
[Mattson et al. (1970)] R. L. Mattson, J. Gecsei, D. R. Slutz, and I. L. Traiger, “Evaluation Techniques for Storage Hierarchies”, IBM Systems Journal, Volume 9, Number 2 (1970), pages 78–117.
[McDougall and Mauro (2007)] R. McDougall and J. Mauro, Solaris Internals, Second Edition, Prentice Hall (2007).
[McKusick and Neville-Neil (2005)] M. K. McKusick and G. V. Neville-Neil, The Design and Implementation of the FreeBSD UNIX Operating System, Addison Wesley (2005).
[Navarro et al. (2002)] J. Navarro, S. Lyer, P. Druschel, and A. Cox, “Practical, Transparent Operating System Support for Superpages”, Proceedings of the USENIX Symposium on Operating Systems Design and Implementation (2002).
[Organick (1972)] E. I. Organick, The Multics System: An Examination of Its Structure, MIT Press (1972).
[Peterson and Norman (1977)] J. L. Peterson and T. A. Norman, “Buddy Systems”, Communications of the ACM, Volume 20, Number 6 (1977), pages 421–431.
[Prieve and Fabry (1976)] B. G. Prieve and R. S. Fabry, “VMIN—An Optimal Variable Space Page-Replacement Algorithm”, Communications of the ACM, Volume 19, Number 5 (1976), pages 295–297.
[Purdom, Jr. and Stigler (1970)] P. W. Purdom, Jr. and S. M. Stigler, “Statistical Properties of the Buddy System”, J. ACM, Volume 17, Number 4 (1970), pages 683–697.
[Russinovich and Solomon (2005)] M. E. Russinovich and D. A. Solomon, Microsoft Windows Internals, Fourth Edition, Microsoft Press (2005).
[Solomon and Russinovich (2000)] D. A. Solomon and M. E. Russinovich, Inside Microsoft Windows 2000, Third Edition, Microsoft Press (2000).
[Stephenson (1983)] C. J. Stephenson, “Fast Fits: A New Method for Dynamic Storage Allocation”, Proceedings of the Ninth Symposium on Operating Systems Principles (1983), pages 30–32.
[Wilson et al. (1995)] P. R. Wilson, M. S. Johnstone, M. Neely, and D. Boles, “Dynamic Storage Allocation: A Survey and Critical Review”, Proceedings of the International Workshop on Memory Management (1995), pages 1–116.
[Wulf (1969)] W. A. Wulf, “Performance Monitors for Multiprogramming Systems”, Proceedings of the ACM Symposium on Operating Systems Principles (1969), pages 175–181.