
CHAPTER 18
The Linux System
Updated by Robert Love
This chapter presents an in-depth examination of the Linux operating system. By examining a complete, real system, we can see how the concepts we have discussed relate both to one another and to practice.
Linux is a variant of UNIX that has gained popularity over the last several decades, powering devices as small as mobile phones and as large as room-filling supercomputers. In this chapter, we look at the history and development of Linux and cover the user and programmer interfaces that Linux presents—interfaces that owe a great deal to the UNIX tradition. We also discuss the design and implementation of these interfaces. Linux is a rapidly evolving operating system. This chapter describes developments through the Linux 3.2 kernel, which was released in 2012.
CHAPTER OBJECTIVES
- To explore the history of the UNIX operating system from which Linux is derived and the principles upon which Linux's design is based.
- To examine the Linux process model and illustrate how Linux schedules processes and provides interprocess communication.
- To look at memory management in Linux.
- To explore how Linux implements file systems and manages I/O devices.
18.1 Linux History
Linux looks and feels much like any other UNIX system; indeed, UNIX compatibility has been a major design goal of the Linux project. However, Linux is much younger than most UNIX systems. Its development began in 1991, when a Finnish university student, Linus Torvalds, began developing a small but self-contained kernel for the 80386 processor, the first true 32-bit processor in Intel's range of PC-compatible CPUs.
Early in its development, the Linux source code was made available free—both at no cost and with minimal distributional restrictions—on the Internet. As a result, Linux's history has been one of collaboration by many developers from all around the world, corresponding almost exclusively over the Internet. From an initial kernel that partially implemented a small subset of the UNIX system services, the Linux system has grown to include all of the functionality expected of a modern UNIX system.
In its early days, Linux development revolved largely around the central operating-system kernel—the core, privileged executive that manages all system resources and interacts directly with the computer hardware. We need much more than this kernel, of course, to produce a full operating system. We thus need to make a distinction between the Linux kernel and a complete Linux system. The Linux kernel is an original piece of software developed from scratch by the Linux community. The Linux system, as we know it today, includes a multitude of components, some written from scratch, others borrowed from other development projects, and still others created in collaboration with other teams.
The basic Linux system is a standard environment for applications and user programming, but it does not enforce any standard means of managing the available functionality as a whole. As Linux has matured, a need has arisen for another layer of functionality on top of the Linux system. This need has been met by various Linux distributions. A Linux distribution includes all the standard components of the Linux system, plus a set of administrative tools to simplify the initial installation and subsequent upgrading of Linux and to manage installation and removal of other packages on the system. A modern distribution also typically includes tools for management of file systems, creation and management of user accounts, administration of networks, Web browsers, word processors, and so on.
18.1.1 The Linux Kernel
The first Linux kernel released to the public was version 0.01, dated May 14, 1991. It had no networking, ran only on 80386-compatible Intel processors and PC hardware, and had extremely limited device-driver support. The virtual memory subsystem was also fairly basic and included no support for memory-mapped files; however, even this early incarnation supported shared pages with copy-on-write and protected address spaces. The only file system supported was the Minix file system, as the first Linux kernels were cross-developed on a Minix platform.
The next milestone, Linux 1.0, was released on March 14, 1994. This release culminated three years of rapid development of the Linux kernel. Perhaps the single biggest new feature was networking: 1.0 included support for UNIX's standard TCP/IP networking protocols, as well as a BSD-compatible socket interface for networking programming. Device-driver support was added for running IP over Ethernet or (via the PPP or SLIP protocols) over serial lines or modems.
The 1.0 kernel also included a new, much enhanced file system without the limitations of the original Minix file system, and it supported a range of SCSI controllers for high-performance disk access. The developers extended the virtual memory subsystem to support paging to swap files and memory mapping of arbitrary files (but only read-only memory mapping was implemented in 1.0).
A range of extra hardware support was included in this release. Although still restricted to the Intel PC platform, hardware support had grown to include floppy-disk and CD-ROM devices, as well as sound cards, a range of mice, and international keyboards. Floating-point emulation was provided in the kernel for 80386 users who had no 80387 math coprocessor. System V UNIX-style interprocess communication (IPC), including shared memory, semaphores, and message queues, was implemented.
At this point, development started on the 1.1 kernel stream, but numerous bug-fix patches were released subsequently for 1.0. A pattern was adopted as the standard numbering convention for Linux kernels. Kernels with an odd minor-version number, such as 1.1 or 2.5, are development kernels; even-numbered minor-version numbers are stable production kernels. Updates for the stable kernels are intended only as remedial versions, whereas the development kernels may include newer and relatively untested functionality. As we will see, this pattern remained in effect until version 3.
In March 1995, the 1.2 kernel was released. This release did not offer nearly the same improvement in functionality as the 1.0 release, but it did support a much wider variety of hardware, including the new PCI hardware bus architecture. Developers added another PC-specific feature—support for the 80386 CPU's virtual 8086 mode—to allow emulation of the DOS operating system for PC computers. They also updated the IP implementation with support for accounting and firewalling. Simple support for dynamically loadable and unloadable kernel modules was supplied as well.
The 1.2 kernel was the final PC-only Linux kernel. The source distribution for Linux 1.2 included partially implemented support for SPARC, Alpha, and MIPS CPUs, but full integration of these other architectures did not begin until after the 1.2 stable kernel was released.
The Linux 1.2 release concentrated on wider hardware support and more complete implementations of existing functionality. Much new functionality was under development at the time, but integration of the new code into the main kernel source code was deferred until after the stable 1.2 kernel was released. As a result, the 1.3 development stream saw a great deal of new functionality added to the kernel.
This work was released in June 1996 as Linux version 2.0. This release was given a major version-number increment because of two major new capabilities: support for multiple architectures, including a 64-bit native Alpha port, and symmetric multiprocessing (SMP) support. Additionally, the memory-management code was substantially improved to provide a unified cache for file-system data independent of the caching of block devices. As a result of this change, the kernel offered greatly increased file-system and virtual-memory performance. For the first time, file-system caching was extended to networked file systems, and writable memory-mapped regions were also supported. Other major improvements included the addition of internal kernel threads, a mechanism exposing dependencies between loadable modules, support for the automatic loading of modules on demand, file-system quotas, and POSIX-compatible real-time process-scheduling classes.
Improvements continued with the release of Linux 2.2 in 1999. A port to UltraSPARC systems was added. Networking was enhanced with more flexible firewalling, improved routing and traffic management, and support for TCP large window and selective acknowledgement. Acorn, Apple, and NT disks could now be read, and NFS was enhanced with a new kernel-mode NFS daemon. Signal handling, interrupts, and some I/O were locked at a finer level than before to improve symmetric multiprocessor (SMP) performance.
Advances in the 2.4 and 2.6 releases of the kernel included increased support for SMP systems, journaling file systems, and enhancements to the memory-management and block I/O systems. The process scheduler was modified in version 2.6, providing an efficient O(1) scheduling algorithm. In addition, the 2.6 kernel was preemptive, allowing a process to be preempted even while running in kernel mode.
Linux kernel version 3.0 was released in July 2011. The major version bump from 2 to 3 occurred to commemorate the twentieth anniversary of Linux. New features include improved virtualization support, a new page write-back facility, improvements to the memory-management system, and yet another new process scheduler—the Completely Fair Scheduler (CFS). We focus on this newest kernel in the remainder of this chapter.
18.1.2 The Linux System
As we noted earlier, the Linux kernel forms the core of the Linux project, but other components make up a complete Linux operating system. Whereas the Linux kernel is composed entirely of code written from scratch specifically for the Linux project, much of the supporting software that makes up the Linux system is not exclusive to Linux but is common to a number of UNIX-like operating systems. In particular, Linux uses many tools developed as part of Berkeley's BSD operating system, MIT's X Window System, and the Free Software Foundation's GNU project.
This sharing of tools has worked in both directions. The main system libraries of Linux were originated by the GNU project, but the Linux community greatly improved the libraries by addressing omissions, inefficiencies, and bugs. Other components, such as the GNU C compiler (gcc), were already of sufficiently high quality to be used directly in Linux. The network administration tools under Linux were derived from code first developed for 4.3 BSD, but more recent BSD derivatives, such as FreeBSD, have borrowed code from Linux in return. Examples of this sharing include the Intel floating-point-emulation math library and the PC sound-hardware device drivers.
The Linux system as a whole is maintained by a loose network of developers collaborating over the Internet, with small groups or individuals having responsibility for maintaining the integrity of specific components. A small number of public Internet file-transfer-protocol (FTP) archive sites act as de facto standard repositories for these components. The File System Hierarchy Standard document is also maintained by the Linux community as a means of ensuring compatibility across the various system components. This standard specifies the overall layout of a standard Linux file system; it determines under which directory names configuration files, libraries, system binaries, and run-time data files should be stored.
18.1.3 Linux Distributions
In theory, anybody can install a Linux system by fetching the latest revisions of the necessary system components from the FTP sites and compiling them. In Linux's early days, this is precisely what a Linux user had to do. As Linux has matured, however, various individuals and groups have attempted to make this job less painful by providing standard, precompiled sets of packages for easy installation.
These collections, or distributions, include much more than just the basic Linux system. They typically include extra system-installation and management utilities, as well as precompiled and ready-to-install packages of many of the common UNIX tools, such as news servers, web browsers, text-processing and editing tools, and even games.
The first distributions managed these packages by simply providing a means of unpacking all the files into the appropriate places. One of the important contributions of modern distributions, however, is advanced package management. Today's Linux distributions include a package-tracking database that allows packages to be installed, upgraded, or removed painlessly.
The SLS distribution, dating back to the early days of Linux, was the first collection of Linux packages that was recognizable as a complete distribution. Although it could be installed as a single entity, SLS lacked the package-management tools now expected of Linux distributions. The Slackware distribution represented a great improvement in overall quality, even though it also had poor package management. In fact, it is still one of the most widely installed distributions in the Linux community.
Since Slackware's release, many commercial and noncommercial Linux distributions have become available. Red Hat and Debian are particularly popular distributions; the first comes from a commercial Linux support company and the second from the free-software Linux community. Other commercially supported versions of Linux include distributions from Canonical and SuSE, and others too numerous to list here. There are too many Linux distributions in circulation for us to list all of them here. The variety of distributions does not prevent Linux distributions from being compatible, however. The RPM package file format is used, or at least understood, by the majority of distributions, and commercial applications distributed in this format can be installed and run on any distribution that can accept RPM files.
18.1.4 Linux Licensing
The Linux kernel is distributed under version 2.0 of the GNU General Public License (GPL), the terms of which are set out by the Free Software Foundation. Linux is not public-domain software. Public domain implies that the authors have waived copyright rights in the software, but copyright rights in Linux code are still held by the code's various authors. Linux is free software, however, in the sense that people can copy it, modify it, use it in any manner they want, and give away (or sell) their own copies.
The main implication of Linux's licensing terms is that nobody using Linux, or creating a derivative of Linux (a legitimate exercise), can distribute the derivative without including the source code. Software released under the GPL cannot be redistributed as a binary-only product. If you release software that includes any components covered by the GPL, then, under the GPL, you must make source code available alongside any binary distributions. (This restriction does not prohibit making—or even selling—binary software distributions, as long as anybody who receives binaries is also given the opportunity to get the originating source code for a reasonable distribution charge.)
18.2 Design Principles
In its overall design, Linux resembles other traditional, nonmicrokernel UNIX implementations. It is a multiuser, preemptively multitasking system with a full set of UNIX-compatible tools. Linux's file system adheres to traditional UNIX semantics, and the standard UNIX networking model is fully implemented. The internal details of Linux's design have been influenced heavily by the history of this operating system's development.
Although Linux runs on a wide variety of platforms, it was originally developed exclusively on PC architecture. A great deal of that early development was carried out by individual enthusiasts rather than by well-funded development or research facilities, so from the start Linux attempted to squeeze as much functionality as possible from limited resources. Today, Linux can run happily on a multiprocessor machine with many gigabytes of main memory and many terabytes of disk space, but it is still capable of operating usefully in under 16 MB of RAM.
As PCs became more powerful and as memory and hard disks became cheaper, the original, minimalist Linux kernels grew to implement more UNIX functionality. Speed and efficiency are still important design goals, but much recent and current work on Linux has concentrated on a third major design goal: standardization. One of the prices paid for the diversity of UNIX implementations currently available is that source code written for one may not necessarily compile or run correctly on another. Even when the same system calls are present on two different UNIX systems, they do not necessarily behave in exactly the same way. The POSIX standards comprise a set of specifications for different aspects of operating-system behavior. There are POSIX documents for common operating-system functionality and for extensions such as process threads and real-time operations. Linux is designed to comply with the relevant POSIX documents, and at least two Linux distributions have achieved official POSIX certification.
Because it gives standard interfaces to both the programmer and the user, Linux presents few surprises to anybody familiar with UNIX. We do not detail these interfaces here. The sections on the programmer interface (Section A.3) and user interface (Section A.4) of BSD apply equally well to Linux. By default, however, the Linux programming interface adheres to SVR4 UNIX semantics, rather than to BSD behavior. A separate set of libraries is available to implement BSD semantics in places where the two behaviors differ significantly.
Many other standards exist in the UNIX world, but full certification of Linux with respect to these standards is sometimes slowed because certification is often available only for a fee, and the expense involved in certifying an operating system's compliance with most standards is substantial. However, supporting a wide base of applications is important for any operating system, so implementation of standards is a major goal for Linux development, even if the implementation is not formally certified. In addition to the basic POSIX standard, Linux currently supports the POSIX threading extensions—Pthreads—and a subset of the POSIX extensions for real-time process control.
18.2.1 Components of a Linux System
The Linux system is composed of three main bodies of code, in line with most traditional UNIX implementations:
- Kernel. The kernel is responsible for maintaining all the important abstractions of the operating system, including such things as virtual memory and processes.
- System libraries. The system libraries define a standard set of functions through which applications can interact with the kernel. These functions implement much of the operating-system functionality that does not need the full privileges of kernel code. The most important system library is the C library, known as libc. In addition to providing the standard C library, libc implements the user mode side of the Linux system call interface, as well as other critical system-level interfaces.
- System utilities. The system utilities are programs that perform individual, specialized management tasks. Some system utilities are invoked just once to initialize and configure some aspect of the system. Others—known as daemons in UNIX terminology—run permanently, handling such tasks as responding to incoming network connections, accepting logon requests from terminals, and updating log files.
Figure 18.1 illustrates the various components that make up a full Linux system. The most important distinction here is between the kernel and everything else. All the kernel code executes in the processor's privileged mode with full access to all the physical resources of the computer. Linux refers to this privileged mode as kernel mode. Under Linux, no user code is built into the kernel. Any operating-system-support code that does not need to run in kernel mode is placed into the system libraries and runs in user mode. Unlike kernel mode, user mode has access only to a controlled subset of the system's resources.
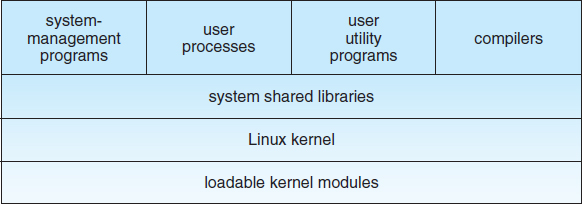
Figure 18.1 Components of the Linux system.
Although various modern operating systems have adopted a message-passing architecture for their kernel internals, Linux retains UNIX's historical model: the kernel is created as a single, monolithic binary. The main reason is performance. Because all kernel code and data structures are kept in a single address space, no context switches are necessary when a process calls an operating-system function or when a hardware interrupt is delivered. Moreover, the kernel can pass data and make requests between various subsystems using relatively cheap C function invocation and not more complicated interprocess communication (IPC). This single address space contains not only the core scheduling and virtual memory code but all kernel code, including all device drivers, file systems, and networking code.
Even though all the kernel components share this same melting pot, there is still room for modularity. In the same way that user applications can load shared libraries at run time to pull in a needed piece of code, so the Linux kernel can load (and unload) modules dynamically at run time. The kernel does not need to know in advance which modules may be loaded—they are truly independent loadable components.
The Linux kernel forms the core of the Linux operating system. It provides all the functionality necessary to run processes, and it provides system services to give arbitrated and protected access to hardware resources. The kernel implements all the features required to qualify as an operating system. On its own, however, the operating system provided by the Linux kernel is not a complete UNIX system. It lacks much of the functionality and behavior of UNIX, and the features that it does provide are not necessarily in the format in which a UNIX application expects them to appear. The operating-system interface visible to running applications is not maintained directly by the kernel. Rather, applications make calls to the system libraries, which in turn call the operating-system services as necessary.
The system libraries provide many types of functionality. At the simplest level, they allow applications to make system calls to the Linux kernel. Making a system call involves transferring control from unprivileged user mode to privileged kernel mode; the details of this transfer vary from architecture to architecture. The libraries take care of collecting the system-call arguments and, if necessary, arranging those arguments in the special form necessary to make the system call.
The libraries may also provide more complex versions of the basic system calls. For example, the C language's buffered file-handling functions are all implemented in the system libraries, providing more advanced control of file I/O than the basic kernel system calls. The libraries also provide routines that do not correspond to system calls at all, such as sorting algorithms, mathematical functions, and string-manipulation routines. All the functions necessary to support the running of UNIX or POSIX applications are implemented in the system libraries.
The Linux system includes a wide variety of user-mode programs—both system utilities and user utilities. The system utilities include all the programs necessary to initialize and then administer the system, such as those to set up networking interfaces and to add and remove users from the system. User utilities are also necessary to the basic operation of the system but do not require elevated privileges to run. They include simple file-management utilities such as those to copy files, create directories, and edit text files. One of the most important user utilities is the shell, the standard command-line interface on UNIX systems. Linux supports many shells; the most common is the bourne-Again shell (bash).
18.3 Kernel Modules
The Linux kernel has the ability to load and unload arbitrary sections of kernel code on demand. These loadable kernel modules run in privileged kernel mode and as a consequence have full access to all the hardware capabilities of the machine on which they run. In theory, there is no restriction on what a kernel module is allowed to do. Among other things, a kernel module can implement a device driver, a file system, or a networking protocol.
Kernel modules are convenient for several reasons. Linux's source code is free, so anybody wanting to write kernel code is able to compile a modified kernel and to reboot into that new functionality. However, recompiling, relinking, and reloading the entire kernel is a cumbersome cycle to undertake when you are developing a new driver. If you use kernel modules, you do not have to make a new kernel to test a new driver—the driver can be compiled on its own and loaded into the already running kernel. Of course, once a new driver is written, it can be distributed as a module so that other users can benefit from it without having to rebuild their kernels.
This latter point has another implication. Because it is covered by the GPL license, the Linux kernel cannot be released with proprietary components added to it unless those new components are also released under the GPL and the source code for them is made available on demand. The kernel's module interface allows third parties to write and distribute, on their own terms, device drivers or file systems that could not be distributed under the GPL.
Kernel modules allow a Linux system to be set up with a standard minimal kernel, without any extra device drivers built in. Any device drivers that the user needs can be either loaded explicitly by the system at startup or loaded automatically by the system on demand and unloaded when not in use. For example, a mouse driver can be loaded when a USB mouse is plugged into the system and unloaded when the mouse is unplugged.
The module support under Linux has four components:
- The module-management system allows modules to be loaded into memory and to communicate with the rest of the kernel.
- The module loader and unloader, which are user-mode utilities, work with the module-management system to load a module into memory.
- The driver-registration system allows modules to tell the rest of the kernel that a new driver has become available.
- Aconflict-resolution mechanism allows different device drivers to reserve hardware resources and to protect those resources from accidental use by another driver.
18.3.1 Module Management
Loading a module requires more than just loading its binary contents into kernel memory. The system must also make sure that any references the module makes to kernel symbols or entry points are updated to point to the correct locations in the kernel's address space. Linux deals with this reference updating by splitting the job of module loading into two separate sections: the management of sections of module code in kernel memory and the handling of symbols that modules are allowed to reference.
Linux maintains an internal symbol table in the kernel. This symbol table does not contain the full set of symbols defined in the kernel during the latter's compilation; rather, a symbol must be explicitly exported. The set of exported symbols constitutes a well-defined interface by which a module can interact with the kernel.
Although exporting symbols from a kernel function requires an explicit request by the programmer, no special effort is needed to import those symbols into a module. A module writer just uses the standard external linking of the C language. Any external symbols referenced by the module but not declared by it are simply marked as unresolved in the final module binary produced by the compiler. When a module is to be loaded into the kernel, a system utility first scans the module for these unresolved references. All symbols that still need to be resolved are looked up in the kernel's symbol table, and the correct addresses of those symbols in the currently running kernel are substituted into the module's code. Only then is the module passed to the kernel for loading. If the system utility cannot resolve all references in the module by looking them up in the kernel's symbol table, then the module is rejected.
The loading of the module is performed in two stages. First, the module-loader utility asks the kernel to reserve a continuous area of virtual kernel memory for the module. The kernel returns the address of the memory allocated, and the loader utility can use this address to relocate the module's machine code to the correct loading address. A second system call then passes the module, plus any symbol table that the new module wants to export, to the kernel. The module itself is now copied verbatim into the previously allocated space, and the kernel's symbol table is updated with the new symbols for possible use by other modules not yet loaded.
The final module-management component is the module requester. The kernel defines a communication interface to which a module-management program can connect. With this connection established, the kernel will inform the management process whenever a process requests a device driver, file system, or network service that is not currently loaded and will give the manager the opportunity to load that service. The original service request will complete once the module is loaded. The manager process regularly queries the kernel to see whether a dynamically loaded module is still in use and unloads that module when it is no longer actively needed.
18.3.2 Driver Registration
Once a module is loaded, it remains no more than an isolated region of memory until it lets the rest of the kernel know what new functionality it provides. The kernel maintains dynamic tables of all known drivers and provides a set of routines to allow drivers to be added to or removed from these tables at any time. The kernel makes sure that it calls a module's startup routine when that module is loaded and calls the module's cleanup routine before that module is unloaded. These routines are responsible for registering the module's functionality.
A module may register many types of functionality; it is not limited to only one type. For example, a device driver might want to register two separate mechanisms for accessing the device. Registration tables include, among others, the following items:
- Device drivers. These drivers include character devices (such as printers, terminals, and mice), block devices (including all disk drives), and network interface devices.
- File systems. The file system may be anything that implements Linux's virtual file system calling routines. It might implement a format for storing files on a disk, but it might equally well be a network file system, such as NFS, or a virtual file system whose contents are generated on demand, such as Linux's /proc file system.
- Network protocols. A module may implement an entire networking protocol, such as TCP or simply a new set of packet-filtering rules for a network firewall.
- Binary format. This format specifies a way of recognizing, loading, and executing a new type of executable file.
In addition, a module can register a new set of entries in the sysctl and /proc tables, to allow that module to be configured dynamically (Section 18.7.4).
18.3.3 Conflict Resolution
Commercial UNIX implementations are usually sold to run on a vendor's own hardware. One advantage of a single-supplier solution is that the software vendor has a good idea about what hardware configurations are possible. PC hardware, however, comes in a vast number of configurations, with large numbers of possible drivers for devices such as network cards and video display adapters. The problem of managing the hardware configuration becomes more severe when modular device drivers are supported, since the currently active set of devices becomes dynamically variable.
Linux provides a central conflict-resolution mechanism to help arbitrate access to certain hardware resources. Its aims are as follows:
- To prevent modules from clashing over access to hardware resources
- To prevent autoprobes—device-driver probes that auto-detect device configuration—from interfering with existing device drivers
- To resolve conflicts among multiple drivers trying to access the same hardware—as, for example, when both the parallel printer driver and the parallel line IP (PLIP) network driver try to talk to the parallel port
To these ends, the kernel maintains lists of allocated hardware resources. The PC has a limited number of possible I/O ports (addresses in its hardware I/O address space), interrupt lines, and DMA channels. When any device driver wants to access such a resource, it is expected to reserve the resource with the kernel database first. This requirement incidentally allows the system administrator to determine exactly which resources have been allocated by which driver at any given point.
A module is expected to use this mechanism to reserve in advance any hardware resources that it expects to use. If the reservation is rejected because the resource is not present or is already in use, then it is up to the module to decide how to proceed. It may fail in its initialization attempt and request that it be unloaded if it cannot continue, or it may carry on, using alternative hardware resources.
18.4 Process Management
A process is the basic context in which all user-requested activity is serviced within the operating system. To be compatible with other UNIX systems, Linux must use a process model similar to those of other versions of UNIX. Linux operates differently from UNIX in a few key places, however. In this section, we review the traditional UNIX process model (Section A.3.2) and introduce Linux's threading model.
18.4.1 The fork() and exec() Process Model
The basic principle of UNIX process management is to separate into two steps two operations that are usually combined into one: the creation of a new process and the running of a new program. A new process is created by the fork() system call, and a new program is run after a call to exec(). These are two distinctly separate functions. We can create a new process with fork() without running a new program—the new subprocess simply continues to execute exactly the same program, at exactly the same point, that the first (parent) process was running. In the same way, running a new program does not require that a new process be created first. Any process may call exec() at any time. A new binary object is loaded into the process's address space and the new executable starts executing in the context of the existing process.
This model has the advantage of great simplicity. It is not necessary to specify every detail of the environment of a new program in the system call that runs that program. The new program simply runs in its existing environment. If a parent process wishes to modify the environment in which a new program is to be run, it can fork and then, still running the original executable in a child process, make any system calls it requires to modify that child process before finally executing the new program.
Under UNIX, then, a process encompasses all the information that the operating system must maintain to track the context of a single execution of a single program. Under Linux, we can break down this context into a number of specific sections. Broadly, process properties fall into three groups: the process identity, environment, and context.
18.4.1.1 Process Identity
A process identity consists mainly of the following items:
- Process ID (PID). Each process has a unique identifier. The PID is used to specify the process to the operating system when an application makes a system call to signal, modify, or wait for the process. Additional identifiers associate the process with a process group (typically, a tree of processes forked by a single user command) and login session.
- Credentials. Each process must have an associated user ID and one or more group IDs (user groups are discussed in Section 11.6.2) that determine the rights of a process to access system resources and files.
- Personality. Process personalities are not traditionally found on UNIX systems, but under Linux each process has an associated personality identifier that can slightly modify the semantics of certain system calls. Personalities are primarily used by emulation libraries to request that system calls be compatible with certain varieties of UNIX.
- Namespace. Each process is associated with a specific view of the file-system hierarchy, called its namespace. Most processes share a common namespace and thus operate on a shared file-system hierarchy. Processes and their children can, however, have different namespaces, each with a unique file-system hierarchy—their own root directory and set of mounted file systems.
Most of these identifiers are under the limited control of the process itself. The process group and session identifiers can be changed if the process wants to start a new group or session. Its credentials can be changed, subject to appropriate security checks. However, the primary PID of a process is unchangeable and uniquely identifies that process until termination.
18.4.1.2 Process Environment
A process's environment is inherited from its parent and is composed of two null-terminated vectors: the argument vector and the environment vector. The argument vector simply lists the command-line arguments used to invoke the running program; it conventionally starts with the name of the program itself. The environment vector is a list of “NAME=VALUE” pairs that associates named environment variables with arbitrary textual values. The environment is not held in kernel memory but is stored in the process's own user-mode address space as the first datum at the top of the process's stack.
The argument and environment vectors are not altered when a new process is created. The new child process will inherit the environment of its parent. However, a completely new environment is set up when a new program is invoked. On calling exec(), a process must supply the environment for the new program. The kernel passes these environment variables to the next program, replacing the process's current environment. The kernel otherwise leaves the environment and command-line vectors alone—their interpretation is left entirely to the user-mode libraries and applications.
The passing of environment variables from one process to the next and the inheriting of these variables by the children of a process provide flexible ways to pass information to components of the user-mode system software. Various important environment variables have conventional meanings to related parts of the system software. For example, the TERM variable is set up to name the type of terminal connected to a user's login session. Many programs use this variable to determine how to perform operations on the user's display, such as moving the cursor and scrolling a region of text. Programs with multilingual support use the LANG variable to determine the language in which to display system messages for programs that include multilingual support.
The environment-variable mechanism custom-tailors the operating system on a per-process basis. Users can choose their own languages or select their own editors independently of one another.
18.4.1.3 Process Context
The process identity and environment properties are usually set up when a process is created and not changed until that process exits. A process may choose to change some aspects of its identity if it needs to do so, or it may alter its environment. In contrast, process context is the state of the running program at any one time; it changes constantly. Process context includes the following parts:
- Scheduling context. The most important part of the process context is its scheduling context—the information that the scheduler needs to suspend and restart the process. This information includes saved copies of all the process's registers. Floating-point registers are stored separately and are restored only when needed. Thus, processes that do not use floating-point arithmetic do not incur the overhead of saving that state. The scheduling context also includes information about scheduling priority and about any outstanding signals waiting to be delivered to the process. A key part of the scheduling context is the process's kernel stack, a separate area of kernel memory reserved for use by kernel-mode code. Both system calls and interrupts that occur while the process is executing will use this stack.
- Accounting. The kernel maintains accounting information about the resources currently being consumed by each process and the total resources consumed by the process in its entire lifetime so far.
- File table. The file table is an array of pointers to kernel file structures representing open files. When making file-I/O system calls, processes refer to files by an integer, known as a file descriptor (fd), that the kernel uses to index into this table.
- File-system context. Whereas the file table lists the existing open files, the file-system context applies to requests to open new files. The file-system context includes the process's root directory, current working directory, and namespace.
- Signal-handler table. UNIX systems can deliver asynchronous signals to a process in response to various external events. The signal-handler table defines the action to take in response to a specific signal. Valid actions include ignoring the signal, terminating the process, and invoking a routine in the process's address space.
- Virtual memory context. The virtual memory context describes the full contents of a process's private address space; we discuss it in Section 18.6.
18.4.2 Processes and Threads
Linux provides the fork() system call, which duplicates a process without loading a new executable image. Linux also provides the ability to create threads via the clone() system call. Linux does not distinguish between processes and threads, however. In fact, Linux generally uses the term task—rather than process or thread—when referring to a flow of control within a program. The clone() system call behaves identically to fork(), except that it accepts as arguments a set of flags that dictate what resources are shared between the parent and child (whereas a process created with fork() shares no resources with its parent). The flags include:
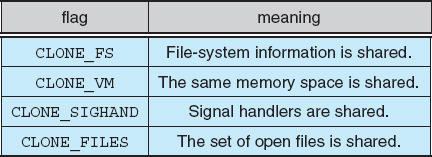
Thus, if clone() is passed the flags CLONE_FS, CLONE_VM, CLONE_SIGHAND, and CLONE_FILES, the parent and child tasks will share the same file-system information (such as the current working directory), the same memory space, the same signal handlers, and the same set of open files. Using clone() in this fashion is equivalent to creating a thread in other systems, since the parent task shares most of its resources with its child task. If none of these flags is set when clone() is invoked, however, the associated resources are not shared, resulting in functionality similar to that of the fork() system call.
The lack of distinction between processes and threads is possible because Linux does not hold a process's entire context within the main process data structure. Rather, it holds the context within independent subcontexts. Thus, a process's file-system context, file-descriptor table, signal-handler table, and virtual memory context are held in separate data structures. The process data structure simply contains pointers to these other structures, so any number of processes can easily share a subcontext by pointing to the same subcontext and incrementing a reference count.
The arguments to the clone() system call tell it which subcontexts to copy and which to share. The new process is always given a new identity and a new scheduling context—these are the essentials of a Linux process. According to the arguments passed, however, the kernel may either create new subcontext data structures initialized so as to be copies of the parent's or set up the new process to use the same subcontext data structures being used by the parent. The fork() system call is nothing more than a special case of clone() that copies all subcontexts, sharing none.
18.5 Scheduling
Scheduling is the job of allocating CPU time to different tasks within an operating system. Linux, like all UNIX systems, supports preemptive multitasking. In such a system, the process scheduler decides which process runs and when. Making these decisions in away that balances fairness and performance across many different workloads is one of the more complicated challenges in modern operating systems.
Normally, we think of scheduling as the running and interrupting of user processes, but another aspect of scheduling is also important to Linux: the running of the various kernel tasks. Kernel tasks encompass both tasks that are requested by a running process and tasks that execute internally on behalf of the kernel itself, such as tasks spawned by Linux's I/O subsystem.
18.5.1 Process Scheduling
Linux has two separate process-scheduling algorithms. One is a time-sharing algorithm for fair, preemptive scheduling among multiple processes. The other is designed for real-time tasks, where absolute priorities are more important than fairness.
The scheduling algorithm used for routine time-sharing tasks received a major overhaul with version 2.6 of the kernel. Earlier versions ran a variation of the traditional UNIX scheduling algorithm. This algorithm does not provide adequate support for SMP systems, does not scale well as the number of tasks on the system grows, and does not maintain fairness among interactive tasks, particularly on systems such as desktops and mobile devices. The process scheduler was first overhauled with version 2.5 of the kernel. Version 2.5 implemented a scheduling algorithm that selects which task to run in constant time—known as O(1)—regardless of the number of tasks or processors in the system. The new scheduler also provided increased support for SMP, including processor affinity and load balancing. These changes, while improving scalability, did not improve interactive performance or fairness—and, in fact, made these problems worse under certain workloads. Consequently, the process scheduler was overhauled a second time, with Linux kernel version 2.6. This version ushered in the Completely Fair Scheduler (CFS).
The Linux scheduler is a preemptive, priority-based algorithm with two separate priority ranges: a real-time range from 0 to 99 and a nice value ranging from −20 to 19. Smaller nice values indicate higher priorities. Thus, by increasing the nice value, you are decreasing your priority and being “nice” to the rest of the system.
CFS is a significant departure from the traditional UNIX process scheduler. In the latter, the core variables in the scheduling algorithm are priority and time slice. The time slice is the length of time—the slice of the processor—that a process is afforded. Traditional UNIX systems give processes a fixed time slice, perhaps with a boost or penalty for high- or low-priority processes, respectively. A process may run for the length of its time slice, and higher-priority processes run before lower-priority processes. It is a simple algorithm that many non-UNIX systems employ. Such simplicity worked well for early time-sharing systems but has proved incapable of delivering good interactive performance and fairness on today's modern desktops and mobile devices.
CFS introduced a new scheduling algorithm called fair scheduling that eliminates time slices in the traditional sense. Instead of time slices, all processes are allotted a proportion of the processor's time. CFS calculates how long a process should run as a function of the total number of runnable processes. To start, CFS says that if there are N runnable processes, then each should be afforded 1/N of the processor's time. CFS then adjusts this allotment by weighting each process's allotment by its nice value. Processes with the default nice value have a weight of 1—their priority is unchanged. Processes with a smaller nice value (higher priority) receive a higher weight, while processes with a larger nice value (lower priority) receive a lower weight. CFS then runs each process for a “time slice” proportional to the process's weight divided by the total weight of all runnable processes.
To calculate the actual length of time a process runs, CFS relies on a configurable variable called target latency, which is the interval of time during which every runnable task should run at least once. For example, assume that the target latency is 10 milliseconds. Further assume that we have two runnable processes of the same priority. Each of these processes has the same weight and therefore receives the same proportion of the processor's time. In this case, with a target latency of 10 milliseconds, the first process runs for 5 milliseconds, then the other process runs for 5 milliseconds, then the first process runs for 5 milliseconds again, and so forth. If we have 10 runnable processes, then CFS will run each for a millisecond before repeating.
But what if we had, say, 1,000 processes? Each process would run for 1 microsecond if we followed the procedure just described. Due to switching costs, scheduling processes for such short lengths of time is inefficient. CFS consequently relies on a second configurable variable, the minimum granularity, which is a minimum length of time any process is allotted the processor. All processes, regardless of the target latency, will run for at least the minimum granularity. In this manner, CFS ensures that switching costs do not grow unacceptably large when the number of runnable processes grows too large. In doing so, it violates its attempts at fairness. In the usual case, however, the number of runnable processes remains reasonable, and both fairness and switching costs are maximized.
With the switch to fair scheduling, CFS behaves differently from traditional UNIX process schedulers in several ways. Most notably, as we have seen, CFS eliminates the concept of a static time slice. Instead, each process receives a proportion of the processor's time. How long that allotment is depends on how many other processes are runnable. This approach solves several problems in mapping priorities to time slices inherent in preemptive, priority-based scheduling algorithms. It is possible, of course, to solve these problems in other ways without abandoning the classic UNIX scheduler. CFS, however, solves the problems with a simple algorithm that performs well on interactive workloads such as mobile devices without compromising throughput performance on the largest of servers.
18.5.2 Real-Time Scheduling
Linux's real-time scheduling algorithm is significantly simpler than the fair scheduling employed for standard time-sharing processes. Linux implements the two real-time scheduling classes required by POSIX.1b: first-come, first-served (FCFS) and round-robin (Section 6.3.1 and Section 6.3.4, respectively). In both cases, each process has a priority in addition to its scheduling class. The scheduler always runs the process with the highest priority. Among processes of equal priority, it runs the process that has been waiting longest. The only difference between FCFS and round-robin scheduling is that FCFS processes continue to run until they either exit or block, whereas a round-robin process will be preempted after a while and will be moved to the end of the scheduling queue, so round-robin processes of equal priority will automatically time-share among themselves.
Linux's real-time scheduling is soft—rather than hard—real time. The scheduler offers strict guarantees about the relative priorities of real-time processes, but the kernel does not offer any guarantees about how quickly a real-time process will be scheduled once that process becomes runnable. In contrast, a hard real-time system can guarantee a minimum latency between when a process becomes runnable and when it actually runs.
18.5.3 Kernel Synchronization
The way the kernel schedules its own operations is fundamentally different from the way it schedules processes. A request for kernel-mode execution can occur in two ways. A running program may request an operating-system service, either explicitly via a system call or implicitly—for example, when a page fault occurs. Alternatively, a device controller may deliver a hardware interrupt that causes the CPU to start executing a kernel-defined handler for that interrupt.
The problem for the kernel is that all these tasks may try to access the same internal data structures. If one kernel task is in the middle of accessing some data structure when an interrupt service routine executes, then that service routine cannot access or modify the same data without risking data corruption. This fact relates to the idea of critical sections—portions of code that access shared data and thus must not be allowed to execute concurrently. As a result, kernel synchronization involves much more than just process scheduling. A framework is required that allows kernel tasks to run without violating the integrity of shared data.
Prior to version 2.6, Linux was a nonpreemptive kernel, meaning that a process running in kernel mode could not be preempted—even if a higher-priority process became available to run. With version 2.6, the Linux kernel became fully preemptive. Now, a task can be preempted when it is running in the kernel.
The Linux kernel provides spinlocks and semaphores (as well as reader–writer versions of these two locks) for locking in the kernel. On SMP machines, the fundamental locking mechanism is a spinlock, and the kernel is designed so that spinlocks are held for only short durations. On single-processor machines, spinlocks are not appropriate for use and are replaced by enabling and disabling kernel preemption. That is, rather than holding a spinlock, the task disables kernel preemption. When the task would otherwise release the spinlock, it enables kernel preemption. This pattern is summarized below:
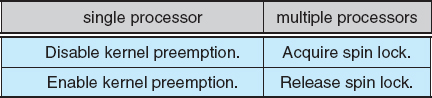
Linux uses an interesting approach to disable and enable kernel preemption. It provides two simple kernel interfaces—preempt_disable() and preempt_enable(). In addition, the kernel is not preemptible if a kernel-mode task is holding a spinlock. To enforce this rule, each task in the system has a thread-info structure that includes the field preempt_count, which is a counter indicating the number of locks being held by the task. The counter is incremented when a lock is acquired and decremented when a lock is released. If the value of preempt_count for the task currently running is greater than zero, it is not safe to preempt the kernel, as this task currently holds a lock. If the count is zero, the kernel can safely be interrupted, assuming there are no outstanding calls to preempt_disable().
Spinlocks—along with the enabling and disabling of kernel preemption—are used in the kernel only when the lock is held for short durations. When a lock must be held for longer periods, semaphores are used.
The second protection technique used by Linux applies to critical sections that occur in interrupt service routines. The basic tool is the processor's interrupt-control hardware. By disabling interrupts (or using spinlocks) during a critical section, the kernel guarantees that it can proceed without the risk of concurrent access to shared data structures.
However, there is a penalty for disabling interrupts. On most hardware architectures, interrupt enable and disable instructions are not cheap. More importantly, as long as interrupts remain disabled, all I/O is suspended, and any device waiting for servicing will have to wait until interrupts are reenabled; thus, performance degrades. To address this problem, the Linux kernel uses a synchronization architecture that allows long critical sections to run for their entire duration without having interrupts disabled. This ability is especially useful in the networking code. An interrupt in a network device driver can signal the arrival of an entire network packet, which may result in a great deal of code being executed to disassemble, route, and forward that packet within the interrupt service routine.
Linux implements this architecture by separating interrupt service routines into two sections: the top half and the bottom half. The top half is the standard interrupt service routine that runs with recursive interrupts disabled. Interrupts of the same number (or line) are disabled, but other interrupts may run. The bottom half of a service routine is run, with all interrupts enabled, by a miniature scheduler that ensures that bottom halves never interrupt themselves. The bottom-half scheduler is invoked automatically whenever an interrupt service routine exits.
This separation means that the kernel can complete any complex processing that has to be done in response to an interrupt without worrying about being interrupted itself. If another interrupt occurs while a bottom half is executing, then that interrupt can request that the same bottom half execute, but the execution will be deferred until the one currently running completes. Each execution of the bottom half can be interrupted by a top half but can never be interrupted by a similar bottom half.
The top-half/bottom-half architecture is completed by a mechanism for disabling selected bottom halves while executing normal, foreground kernel code. The kernel can code critical sections easily using this system. Interrupt handlers can code their critical sections as bottom halves; and when the foreground kernel wants to enter a critical section, it can disable any relevant bottom halves to prevent any other critical sections from interrupting it. At the end of the critical section, the kernel can reenable the bottom halves and run any bottom-half tasks that have been queued by top-half interrupt service routines during the critical section.
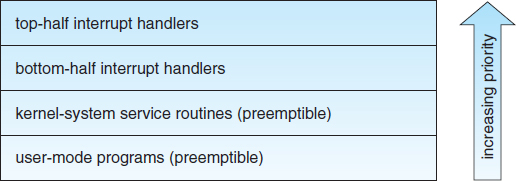
Figure 18.2 Interrupt protection levels.
Figure 18.2 summarizes the various levels of interrupt protection within the kernel. Each level may be interrupted by code running at a higher level but will never be interrupted by code running at the same or a lower level. Except for user-mode code, user processes can always be preempted by another process when a time-sharing scheduling interrupt occurs.
18.5.4 Symmetric Multiprocessing
The Linux 2.0 kernel was the first stable Linux kernel to support symmetric multiprocessor (SMP) hardware, allowing separate processes to execute in parallel on separate processors. The original implementation of SMP imposed the restriction that only one processor at a time could be executing kernel code.
In version 2.2 of the kernel, a single kernel spinlock (sometimes termed BKL for “big kernel lock”) was created to allow multiple processes (running on different processors) to be active in the kernel concurrently. However, the BKL provided a very coarse level of locking granularity, resulting in poor scalability to machines with many processors and processes. Later releases of the kernel made the SMP implementation more scalable by splitting this single kernel spinlock into multiple locks, each of which protects only a small subset of the kernel's data structures. Such spinlocks are described in Section 18.5.3. The 3.0 kernel provides additional SMP enhancements, including ever-finer locking, processor affinity, and load-balancing algorithms.
18.6 Memory Management
Memory management under Linux has two components. The first deals with allocating and freeing physical memory—pages, groups of pages, and small blocks of RAM. The second handles virtual memory, which is memory-mapped into the address space of running processes. In this section, we describe these two components and then examine the mechanisms by which the loadable components of a new program are brought into a process's virtual memory in response to an exec() system call.
18.6.1 Management of Physical Memory
Due to specific hardware constraints, Linux separates physical memory into four different zones, or regions:
- ZONE_DMA
- ZONE_DMA32
- ZONE_NORMAL
- ZONE_HIGHMEM
These zones are architecture specific. For example, on the Intel x86-32 architecture, certain ISA (industry standard architecture) devices can only access the lower 16 MB of physical memory using DMA. On these systems, the first 16 MB of physical memory comprise ZONE_DMA. On other systems, certain devices can only access the first 4 GB of physical memory, despite supporting 64-bit addresses. On such systems, the first 4 GB of physical memory comprise ZONE_DMA32. ZONE_HIGHMEM (for “high memory”) refers to physical memory that is not mapped into the kernel address space. For example, on the 32-bit Intel architecture (where 232 provides a 4-GB address space), the kernel is mapped into the first 896 MB of the address space; the remaining memory is referred to as high memory and is allocated from ZONE_HIGHMEM. Finally, ZONE_NORMAL comprises everything else—the normal, regularly mapped pages. Whether an architecture has a given zone depends on its constraints. A modern, 64-bit architecture such as Intel x86-64 has a small 16 MB ZONE_DMA (for legacy devices) and all the rest of its memory in ZONE_NORMAL, with no “high memory”.
The relationship of zones and physical addresses on the Intel x86-32 architecture is shown in Figure 18.3. The kernel maintains a list of free pages for each zone. When a request for physical memory arrives, the kernel satisfies the request using the appropriate zone.
The primary physical-memory manager in the Linux kernel is the page allocator. Each zone has its own allocator, which is responsible for allocating and freeing all physical pages for the zone and is capable of allocating ranges of physically contiguous pages on request. The allocator uses a buddy system (Section 9.8.1) to keep track of available physical pages. In this scheme, adjacent units of allocatable memory are paired together (hence its name). Each allocatable memory region has an adjacent partner (or buddy). Whenever two allocated partner regions are freed up, they are combined to form a larger region—a buddy heap. That larger region also has a partner, with which it can combine to form a still larger free region. Conversely, if a small memory request cannot be satisfied by allocation of an existing small free region, then a larger free region will be subdivided into two partners to satisfy the request. Separate linked lists are used to record the free memory regions of each allowable size. Under Linux, the smallest size allocatable under this mechanism is a single physical page. Figure 18.4 shows an example of buddy-heap allocation. A 4-KB region is being allocated, but the smallest available region is 16 KB. The region is broken up recursively until a piece of the desired size is available.
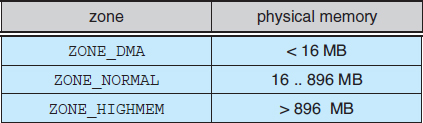
Figure 18.3 Relationship of zones and physical addresses in Intel x86-32.
Ultimately, all memory allocations in the Linux kernel are made either statically, by drivers that reserve a contiguous area of memory during system boot time, or dynamically, by the page allocator. However, kernel functions do not have to use the basic allocator to reserve memory. Several specialized memory-management subsystems use the underlying page allocator to manage their own pools of memory. The most important are the virtual memory system, described in Section 18.6.2; the kmalloc() variable-length allocator; the slab allocator, used for allocating memory for kernel data structures; and the page cache, used for caching pages belonging to files.
Many components of the Linux operating system need to allocate entire pages on request, but often smaller blocks of memory are required. The kernel provides an additional allocator for arbitrary-sized requests, where the size of a request is not known in advance and may be only a few bytes. Analogous to the C language's malloc() function, this kmalloc() service allocates entire physical pages on demand but then splits them into smaller pieces. The kernel maintains lists of pages in use by the kmalloc() service. Allocating memory involves determining the appropriate list and either taking the first free piece available on the list or allocating a new page and splitting it up. Memory regions claimed by the kmalloc() system are allocated permanently until they are freed explicitly with a corresponding call to kfree(); the kmalloc() system cannot reallocate or reclaim these regions in response to memory shortages.
Another strategy adopted by Linux for allocating kernel memory is known as slab allocation. A slab is used for allocating memory for kernel data structures and is made up of one or more physically contiguous pages. A cache consists of one or more slabs. There is a single cache for each unique kernel data structure—for example, a cache for the data structure representing process descriptors, a cache for file objects, a cache for inodes, and so forth. Each cache is populated with objects that are instantiations of the kernel data structure the cache represents. For example, the cache representing inodes stores instances of inode structures, and the cache representing process descriptors stores instances of process descriptor structures. The relationship among slabs, caches, and objects is shown in Figure 18.5. The figure shows two kernel objects 3 KB in size and three objects 7 KB in size. These objects are stored in the respective caches for 3-KB and 7-KB objects.
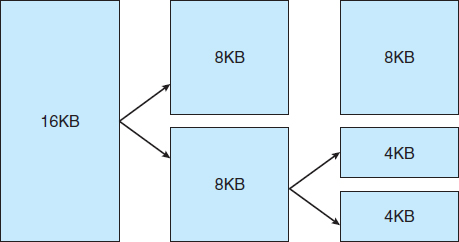
Figure 18.4 Splitting of memory in the buddy system.
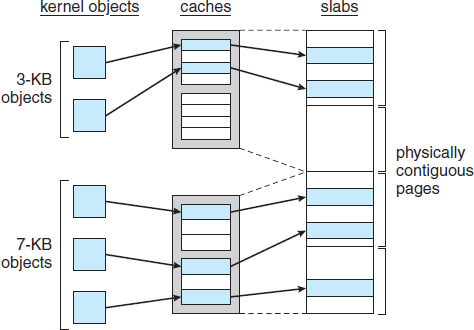
Figure 18.5 Slab allocator in Linux.
The slab-allocation algorithm uses caches to store kernel objects. When a cache is created, a number of objects are allocated to the cache. The number of objects in the cache depends on the size of the associated slab. For example, a 12-KB slab (made up of three contiguous 4-KB pages) could store six 2-KB objects. Initially, all the objects in the cache are marked as free. When a new object for a kernel data structure is needed, the allocator can assign any free object from the cache to satisfy the request. The object assigned from the cache is marked as used.
Let's consider a scenario in which the kernel requests memory from the slab allocator for an object representing a process descriptor. In Linux systems, a process descriptor is of the type struct task_struct, which requires approximately 1.7 KB of memory. When the Linux kernel creates a new task, it requests the necessary memory for the struct task_struct object from its cache. The cache will fulfill the request using a struct task_struct object that has already been allocated in a slab and is marked as free.
In Linux, a slab may be in one of three possible states:
- Full. All objects in the slab are marked as used.
- Empty. All objects in the slab are marked as free.
- Partial. The slab consists of both used and free objects.
The slab allocator first attempts to satisfy the request with a free object in a partial slab. If none exist, a free object is assigned from an empty slab. If no empty slabs are available, a new slab is allocated from contiguous physical pages and assigned to a cache; memory for the object is allocated from this slab.
Two other main subsystems in Linux do their own management of physical pages: the page cache and the virtual memory system. These systems are closely related to each other. The page cache is the kernel's main cache for files and is the main mechanism through which I/O to block devices (Section 18.8.1) is performed. File systems of all types, including the native Linux disk-based file systems and the NFS networked file system, perform their I/O through the page cache. The page cache stores entire pages of file contents and is not limited to block devices. It can also cache networked data. The virtual memory system manages the contents of each process's virtual address space. These two systems interact closely with each other because reading a page of data into the page cache requires mapping pages in the page cache using the virtual memory system. In the following section, we look at the virtual memory system in greater detail.
18.6.2 Virtual Memory
The Linux virtual memory system is responsible for maintaining the address space accessible to each process. It creates pages of virtual memory on demand and manages loading those pages from disk and swapping them back out to disk as required. Under Linux, the virtual memory manager maintains two separate views of a process's address space: as a set of separate regions and as a set of pages.
The first view of an address space is the logical view, describing instructions that the virtual memory system has received concerning the layout of the address space. In this view, the address space consists of a set of nonoverlapping regions, each region representing a continuous, page-aligned subset of the address space. Each region is described internally by a single vm_area_struct structure that defines the properties of the region, including the process's read, write, and execute permissions in the region as well as information about any files associated with the region. The regions for each address space are linked into a balanced binary tree to allow fast lookup of the region corresponding to any virtual address.
The kernel also maintains a second, physical view of each address space. This view is stored in the hardware page tables for the process. The page-table entries identify the exact current location of each page of virtual memory, whether it is on disk or in physical memory. The physical view is managed by a set of routines, which are invoked from the kernel's software-interrupt handlers whenever a process tries to access a page that is not currently present in the page tables. Each vm_area_struct in the address-space description contains a field pointing to a table of functions that implement the key page-management functionality for any given virtual memory region. All requests to read or write an unavailable page are eventually dispatched to the appropriate handler in the function table for the vm_area_struct, so that the central memory-management routines do not have to know the details of managing each possible type of memory region.
18.6.2.1 Virtual Memory Regions
Linux implements several types of virtual memory regions. One property that characterizes virtual memory is the backing store for the region, which describes where the pages for the region come from. Most memory regions are backed either by a file or by nothing. A region backed by nothing is the simplest type of virtual memory region. Such a region represents demand-zero memory: when a process tries to read a page in such a region, it is simply given back a page of memory filled with zeros.
A region backed by a file acts as a viewport onto a section of that file. Whenever the process tries to access a page within that region, the page table is filled with the address of a page within the kernel's page cache corresponding to the appropriate offset in the file. The same page of physical memory is used by both the page cache and the process's page tables, so any changes made to the file by the file system are immediately visible to any processes that have mapped that file into their address space. Any number of processes can map the same region of the same file, and they will all end up using the same page of physical memory for the purpose.
A virtual memory region is also defined by its reaction to writes. The mapping of a region into the process's address space can be either private or shared. If a process writes to a privately mapped region, then the pager detects that a copy-on-write is necessary to keep the changes local to the process. In contrast, writes to a shared region result in updating of the object mapped into that region, so that the change will be visible immediately to any other process that is mapping that object.
18.6.2.2 Lifetime of a Virtual Address Space
The kernel creates a new virtual address space in two situations: when a process runs a new program with the exec() system call and when a new process is created by the fork() system call. The first case is easy. When a new program is executed, the process is given a new, completely empty virtual address space. It is up to the routines for loading the program to populate the address space with virtual memory regions.
The second case, creating a new process with fork(), involves creating a complete copy of the existing process's virtual address space. The kernel copies the parent process's vm_area_struct descriptors, then creates a new set of page tables for the child. The parent's page tables are copied directly into the child's, and the reference count of each page covered is incremented. Thus, after the fork, the parent and child share the same physical pages of memory in their address spaces.
A special case occurs when the copying operation reaches a virtual memory region that is mapped privately. Any pages to which the parent process has written within such a region are private, and subsequent changes to these pages by either the parent or the child must not update the page in the other process's address space. When the page-table entries for such regions are copied, they are set to be read only and are marked for copy-on-write. As long as neither process modifies these pages, the two processes share the same page of physical memory. However, if either process tries to modify a copy-on-write page, the reference count on the page is checked. If the page is still shared, then the process copies the page's contents to a brand-new page of physical memory and uses its copy instead. This mechanism ensures that private data pages are shared between processes whenever possible and copies are made only when absolutely necessary.
18.6.2.3 Swapping and Paging
An important task for a virtual memory system is to relocate pages of memory from physical memory out to disk when that memory is needed. Early UNIX systems performed this relocation by swapping out the contents of entire processes at once, but modern versions of UNIX rely more on paging—the movement of individual pages of virtual memory between physical memory and disk. Linux does not implement whole-process swapping; it uses the newer paging mechanism exclusively.
The paging system can be divided into two sections. First, the policy algorithm decides which pages to write out to disk and when to write them. Second, the paging mechanism carries out the transfer and pages data back into physical memory when they are needed again.
Linux's pageout policy uses a modified version of the standard clock (or second-chance) algorithm described in Section 9.4.5.2. Under Linux, a multiple-pass clock is used, and every page has an age that is adjusted on each pass of the clock. The age is more precisely a measure of the page's youthfulness, or how much activity the page has seen recently. Frequently accessed pages will attain a higher age value, but the age of infrequently accessed pages will drop toward zero with each pass. This age valuing allows the pager to select pages to page out based on a least frequently used (LFU) policy.
The paging mechanism supports paging both to dedicated swap devices and partitions and to normal files, although swapping to a file is significantly slower due to the extra overhead incurred by the file system. Blocks are allocated from the swap devices according to a bitmap of used blocks, which is maintained in physical memory at all times. The allocator uses a next-fit algorithm to try to write out pages to continuous runs of disk blocks for improved performance. The allocator records the fact that a page has been paged out to disk by using a feature of the page tables on modern processors: the page-table entry's page-not-present bit is set, allowing the rest of the page-table entry to be filled with an index identifying where the page has been written.
18.6.2.4 Kernel Virtual Memory
Linux reserves for its own internal use a constant, architecture-dependent region of the virtual address space of every process. The page-table entries that map to these kernel pages are marked as protected, so that the pages are not visible or modifiable when the processor is running in user mode. This kernel virtual memory area contains two regions. The first is a static area that contains page-table references to every available physical page of memory in the system, so that a simple translation from physical to virtual addresses occurs when kernel code is run. The core of the kernel, along with all pages allocated by the normal page allocator, resides in this region.
The remainder of the kernel's reserved section of address space is not reserved for any specific purpose. Page-table entries in this address range can be modified by the kernel to point to any other areas of memory. The kernel provides a pair of facilities that allow kernel code to use this virtual memory. The vmalloc() function allocates an arbitrary number of physical pages of memory that may not be physically contiguous into a single region of virtually contiguous kernel memory. The vremap() function maps a sequence of virtual addresses to point to an area of memory used by a device driver for memory-mapped I/O.
18.6.3 Execution and Loading of User Programs
The Linux kernel's execution of user programs is triggered by a call to the exec() system call. This exec() call commands the kernel to run a new program within the current process, completely overwriting the current execution context with the initial context of the new program. The first job of this system service is to verify that the calling process has permission rights to the file being executed. Once that matter has been checked, the kernel invokes a loader routine to start running the program. The loader does not necessarily load the contents of the program file into physical memory, but it does at least set up the mapping of the program into virtual memory.
There is no single routine in Linux for loading a new program. Instead, Linux maintains a table of possible loader functions, and it gives each such function the opportunity to try loading the given file when an exec() system call is made. The initial reason for this loader table was that, between the releases of the 1.0 and 1.2 kernels, the standard format for Linux's binary files was changed. Older Linux kernels understood the a.out format for binary files—a relatively simple format common on older UNIX systems. Newer Linux systems use the more modern ELF format, now supported by most current UNIX implementations. ELF has a number of advantages over a.out, including flexibility and extendability. New sections can be added to an ELF binary (for example, to add extra debugging information) without causing the loader routines to become confused. By allowing registration of multiple loader routines, Linux can easily support the ELF and a.out binary formats in a single running system.
In Section 18.6.3.1 and Section 18.6.3.2, we concentrate exclusively on the loading and running of ELF-format binaries. The procedure for loading a.out binaries is simpler but similar in operation.
18.6.3.1 Mapping of Programs into Memory
Under Linux, the binary loader does not load a binary file into physical memory. Rather, the pages of the binary file are mapped into regions of virtual memory. Only when the program tries to access a given page will a page fault result in the loading of that page into physical memory using demand paging.
It is the responsibility of the kernel's binary loader to set up the initial memory mapping. An ELF-format binary file consists of a header followed by several page-aligned sections. The ELF loader works by reading the header and mapping the sections of the file into separate regions of virtual memory.
Figure 18.6 shows the typical layout of memory regions set up by the ELF loader. In a reserved region at one end of the address space sits the kernel, in its own privileged region of virtual memory inaccessible to normal user-mode programs. The rest of virtual memory is available to applications, which can use the kernel's memory-mapping functions to create regions that map a portion of a file or that are available for application data.
Figure 18.6 Memory layout for ELF programs.
The loader's job is to set up the initial memory mapping to allow the execution of the program to start. The regions that need to be initialized include the stack and the program's text and data regions.
The stack is created at the top of the user-mode virtual memory; it grows downward toward lower-numbered addresses. It includes copies of the arguments and environment variables given to the program in the exec() system call. The other regions are created near the bottom end of virtual memory. The sections of the binary file that contain program text or read-only data are mapped into memory as a write-protected region. Writable initialized data are mapped next; then any uninitialized data are mapped in as a private demand-zero region.
Directly beyond these fixed-sized regions is a variable-sized region that programs can expand as needed to hold data allocated at run time. Each process has a pointer, brk, that points to the current extent of this data region, and processes can extend or contract their brk region with a single system call—sbrk().
Once these mappings have been set up, the loader initializes the process's program-counter register with the starting point recorded in the ELF header, and the process can be scheduled.
18.6.3.2 Static and Dynamic Linking
Once the program has been loaded and has started running, all the necessary contents of the binary file have been loaded into the process's virtual address space. However, most programs also need to run functions from the system libraries, and these library functions must also be loaded. In the simplest case, the necessary library functions are embedded directly in the program's executable binary file. Such a program is statically linked to its libraries, and statically linked executables can commence running as soon as they are loaded.
The main disadvantage of static linking is that every program generated must contain copies of exactly the same common system library functions. It is much more efficient, in terms of both physical memory and disk-space usage, to load the system libraries into memory only once. Dynamic linking allows that to happen.
Linux implements dynamic linking in user mode through a special linker library. Every dynamically linked program contains a small, statically linked function that is called when the program starts. This static function just maps the link library into memory and runs the code that the function contains. The link library determines the dynamic libraries required by the program and the names of the variables and functions needed from those libraries by reading the information contained in sections of the ELF binary. It then maps the libraries into the middle of virtual memory and resolves the references to the symbols contained in those libraries. It does not matter exactly where in memory these shared libraries are mapped: they are compiled into position-independent code (PIC), which can run at any address in memory.
18.7 File Systems
Linux retains UNIX's standard file-system model. In UNIX, a file does not have to be an object stored on disk or fetched over a network from a remote file server. Rather, UNIX files can be anything capable of handling the input or output of a stream of data. Device drivers can appear as files, and interprocess-communication channels or network connections also look like files to the user.
The Linux kernel handles all these types of files by hiding the implementation details of any single file type behind a layer of software, the virtual file system (VFS). Here, we first cover the virtual file system and then discuss the standard Linux file system—ext3.
18.7.1 The Virtual File System
The Linux VFS is designed around object-oriented principles. It has two components: a set of definitions that specify what file-system objects are allowed to look like and a layer of software to manipulate the objects. The VFS defines four main object types:
- An inode object represents an individual file.
- A file object represents an open file.
- A superblock object represents an entire file system.
- A dentry object represents an individual directory entry.
For each of these four object types, the VFS defines a set of operations. Every object of one of these types contains a pointer to a function table. The function table lists the addresses of the actual functions that implement the defined operations for that object. For example, an abbreviated API for some of the file object's operations includes:
- int open(. . .) — Open a file.
- ssize_t read(. . .) — Read from a file.
- ssize_t write(. . .) — Write to a file.
- int mmap(. . .) — Memory-map a file.
The complete definition of the file object is specified in the struct file_operations, which is located in the file /usr/include/linux/fs.h. An implementation of the file object (for a specific file type) is required to implement each function specified in the definition of the file object.
The VFS software layer can perform an operation on one of the file-system objects by calling the appropriate function from the object's function table, without having to know in advance exactly what kind of object it is dealing with. The VFS does not know, or care, whether an inode represents a networked file, a disk file, a network socket, or a directory file. The appropriate function for that file's read() operation will always be at the same place in its function table, and the VFS software layer will call that function without caring how the data are actually read.
The inode and file objects are the mechanisms used to access files. An inode object is a data structure containing pointers to the disk blocks that contain the actual file contents, and a file object represents a point of access to the data in an open file. A process cannot access an inode's contents without first obtaining a file object pointing to the inode. The file object keeps track of where in the file the process is currently reading or writing, to keep track of sequential file I/O. It also remembers the permissions (for example, read or write) requested when the file was opened and tracks the process's activity if necessary to perform adaptive read-ahead, fetching file data into memory before the process requests the data, to improve performance.
File objects typically belong to a single process, but inode objects do not. There is one file object for every instance of an open file, but always only a single inode object. Even when a file is no longer in use by any process, its inode object may still be cached by the VFS to improve performance if the file is used again in the near future. All cached file data are linked onto a list in the file's inode object. The inode also maintains standard information about each file, such as the owner, size, and time most recently modified.
Directory files are dealt with slightly differently from other files. The UNIX programming interface defines a number of operations on directories, such as creating, deleting, and renaming a file in a directory. The system calls for these directory operations do not require that the user open the files concerned, unlike the case for reading or writing data. The VFS therefore defines these directory operations in the inode object, rather than in the file object.
The superblock object represents a connected set of files that form a self-contained file system. The operating-system kernel maintains a single superblock object for each disk device mounted as a file system and for each networked file system currently connected. The main responsibility of the superblock object is to provide access to inodes. The VFS identifies every inode by a unique file-system/inode number pair, and it finds the inode corresponding to a particular inode number by asking the superblock object to return the inode with that number.
Finally, a dentry object represents a directory entry, which may include the name of a directory in the path name of a file (such as /usr) or the actual file (such as stdio.h). For example, the file /usr/include/stdio.h contains the directory entries (1) /, (2) usr, (3) include, and (4) stdio.h. Each of these values is represented by a separate dentry object.
As an example of how dentry objects are used, consider the situation in which a process wishes to open the file with the pathname /usr/include/stdio.h using an editor. Because Linux treats directory names as files, translating this path requires first obtaining the inode for the root—/. The operating system must then read through this file to obtain the inode for the file include. It must continue this process until it obtains the inode for the file stdio.h. Because path-name translation can be a time-consuming task, Linux maintains a cache of dentry objects, which is consulted during path-name translation. Obtaining the inode from the dentry cache is considerably faster than having to read the on-disk file.
18.7.2 The Linux ext3 File System
The standard on-disk file system used by Linux is called ext3, for historical reasons. Linux was originally programmed with a Minix-compatible file system, to ease exchanging data with the Minix development system, but that file system was severely restricted by 14-character file-name limits and a maximum file-system size of 64 MB. The Minix file system was superseded by a new file system, which was christened the extended file system (extfs). A later redesign to improve performance and scalability and to add a few missing features led to the second extended file system (ext2). Further development added journaling capabilities, and the system was renamed the third extended file system (ext3). Linux kernel developers are working on augmenting ext3 with modern file-system features such as extents. This new file system is called the fourth extended file system (ext4). The rest of this section discusses ext3, however, since it remains the most-deployed Linux file system. Most of the discussion applies equally to ext4.
Linux's ext3 has much in common with the BSD Fast File System (FFS) (Section A.7.7). It uses a similar mechanism for locating the data blocks belonging to a specific file, storing data-block pointers in indirect blocks throughout the file system with up to three levels of indirection. As in FFS, directory files are stored on disk just like normal files, although their contents are interpreted differently. Each block in a directory file consists of a linked list of entries. In turn, each entry contains the length of the entry, the name of a file, and the inode number of the inode to which that entry refers.
The main differences between ext3 and FFS lie in their disk-allocation policies. In FFS, the disk is allocated to files in blocks of 8 KB. These blocks are subdivided into fragments of 1 KB for storage of small files or partially filled blocks at the ends of files. In contrast, ext3 does not use fragments at all but performs all its allocations in smaller units. The default block size on ext3 varies as a function of the total size of the file system. Supported block sizes are 1, 2, 4, and 8 KB.
To maintain high performance, the operating system must try to perform I/O operations in large chunks whenever possible by clustering physically adjacent I/O requests. Clustering reduces the per-request overhead incurred by device drivers, disks, and disk-controller hardware. A block-sized I/O request size is too small to maintain good performance, so ext3 uses allocation policies designed to place logically adjacent blocks of a file into physically adjacent blocks on disk, so that it can submit an I/O request for several disk blocks as a single operation.
The ext3 allocation policy works as follows: As in FFS, an ext3 file system is partitioned into multiple segments. In ext3, these are called block groups. FFS uses the similar concept of cylinder groups, where each group corresponds to a single cylinder of a physical disk. (Note that modern disk-drive technology packs sectors onto the disk at different densities, and thus with different cylinder sizes, depending on how far the disk head is from the center of the disk. Therefore, fixed-sized cylinder groups do not necessarily correspond to the disk's geometry.)
When allocating a file, ext3 must first select the block group for that file. For data blocks, it attempts to allocate the file to the block group to which the file's inode has been allocated. For inode allocations, it selects the block group in which the file's parent directory resides for nondirectory files. Directory files are not kept together but rather are dispersed throughout the available block groups. These policies are designed not only to keep related information within the same block group but also to spread out the disk load among the disk's block groups to reduce the fragmentation of any one area of the disk.
Within a block group, ext3 tries to keep allocations physically contiguous if possible, reducing fragmentation if it can. It maintains a bitmap of all free blocks in a block group. When allocating the first blocks for a new file, it starts searching for a free block from the beginning of the block group. When extending a file, it continues the search from the block most recently allocated to the file. The search is performed in two stages. First, ext3 searches for an entire free byte in the bitmap; if it fails to find one, it looks for any free bit. The search for free bytes aims to allocate disk space in chunks of at least eight blocks where possible.
Once a free block has been identified, the search is extended backward until an allocated block is encountered. When a free byte is found in the bitmap, this backward extension prevents ext3 from leaving a hole between the most recently allocated block in the previous nonzero byte and the zero byte found. Once the next block to be allocated has been found by either bit or byte search, ext3 extends the allocation forward for up to eight blocks and preallocates these extra blocks to the file. This preallocation helps to reduce fragmentation during interleaved writes to separate files and also reduces the CPU cost of disk allocation by allocating multiple blocks simultaneously. The preallocated blocks are returned to the free-space bitmap when the file is closed.
Figure 18.7 illustrates the allocation policies. Each row represents a sequence of set and unset bits in an allocation bitmap, indicating used and free blocks on disk. In the first case, if we can find any free blocks sufficiently near the start of the search, then we allocate them no matter how fragmented they may be. The fragmentation is partially compensated for by the fact that the blocks are close together and can probably all be read without any disk seeks. Furthermore, allocating them all to one file is better in the long run than allocating isolated blocks to separate files once large free areas become scarce on disk. In the second case, we have not immediately found a free block close by, so we search forward for an entire free byte in the bitmap. If we allocated that byte as a whole, we would end up creating a fragmented area of free space between it and the allocation preceding it. Thus, before allocating, we back up to make this allocation flush with the allocation preceding it, and then we allocate forward to satisfy the default allocation of eight blocks.
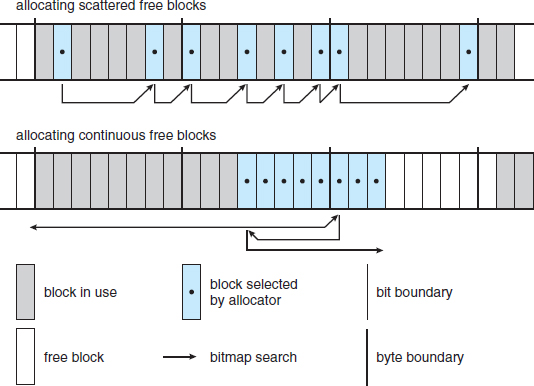
Figure 18.7 ext3 block-allocation policies.
18.7.3 Journaling
The ext3 file system supports a popular feature called journaling, whereby modifications to the file system are written sequentially to a journal. A set of operations that performs a specific task is a transaction. Once a transaction is written to the journal, it is considered to be committed. Meanwhile, the journal entries relating to the transaction are replayed across the actual file system structures. As the changes are made, a pointer is updated to indicate which actions have completed and which are still incomplete. When an entire committed transaction is completed, it is removed from the journal. The journal, which is actually a circular buffer, may be in a separate section of the file system, or it may even be on a separate disk spindle. It is more efficient, but more complex, to have it under separate read–write heads, thereby decreasing head contention and seek times.
If the system crashes, some transactions may remain in the journal. Those transactions were never completed to the file system even though they were committed by the operating system, so they must be completed once the system recovers. The transactions can be executed from the pointer until the work is complete, and the file-system structures remain consistent. The only problem occurs when a transaction has been aborted—that is, it was not committed before the system crashed. Any changes from those transactions that were applied to the file system must be undone, again preserving the consistency of the file system. This recovery is all that is needed after a crash, eliminating all problems with consistency checking.
Journaling file systems may perform some operations faster than non-journaling systems, as updates proceed much faster when they are applied to the in-memory journal rather than directly to the on-disk data structures. The reason for this improvement is found in the performance advantage of sequential I/O over random I/O. Costly synchronous random writes to the file system are turned into much less costly synchronous sequential writes to the file system's journal. Those changes, in turn, are replayed asynchronously via random writes to the appropriate structures. The overall result is a significant gain in performance of file-system metadata-oriented operations, such as file creation and deletion. Due to this performance improvement, ext3 can be configured to journal only metadata and not file data.
18.7.4 The Linux Process File System
The flexibility of the Linux VFS enables us to implement a file system that does not store data persistently at all but rather provides an interface to some other functionality. The Linux process file system, known as the /proc file system, is an example of a file system whose contents are not actually stored anywhere but are computed on demand according to user file I/O requests.
A /proc file system is not unique to Linux. SVR4 UNIX introduced a /proc file system as an efficient interface to the kernel's process debugging support. Each subdirectory of the file system corresponded not to a directory on any disk but rather to an active process on the current system. A listing of the file system reveals one directory per process, with the directory name being the ASCII decimal representation of the process's unique process identifier (PID).
Linux implements such a /proc file system but extends it greatly by adding a number of extra directories and text files under the file system's root directory. These new entries correspond to various statistics about the kernel and the associated loaded drivers. The /proc file system provides a way for programs to access this information as plain text files; the standard UNIX user environment provides powerful tools to process such files. For example, in the past, the traditional UNIX ps command for listing the states of all running processes has been implemented as a privileged process that reads the process state directly from the kernel's virtual memory. Under Linux, this command is implemented as an entirely unprivileged program that simply parses and formats the information from /proc.
The /proc file system must implement two things: a directory structure and the file contents within. Because a UNIX file system is defined as a set of file and directory inodes identified by their inode numbers, the /proc file system must define a unique and persistent inode number for each directory and the associated files. Once such a mapping exists, the file system can use this inode number to identify just what operation is required when a user tries to read from a particular file inode or to perform a lookup in a particular directory inode. When data are read from one of these files, the /proc file system will collect the appropriate information, format it into textual form, and place it into the requesting process's read buffer.
The mapping from inode number to information type splits the inode number into two fields. In Linux, a PID is 16 bits in size, but an inode number is 32 bits. The top 16 bits of the inode number are interpreted as a PID, and the remaining bits define what type of information is being requested about that process.
A PID of zero is not valid, so a zero PID field in the inode number is taken to mean that this inode contains global—rather than process-specific—information. Separate global files exist in /proc to report information such as the kernel version, free memory, performance statistics, and drivers currently running.
Not all the inode numbers in this range are reserved. The kernel can allocate new /proc inode mappings dynamically, maintaining a bitmap of allocated inode numbers. It also maintains a tree data structure of registered global /proc file-system entries. Each entry contains the file's inode number, file name, and access permissions, along with the special functions used to generate the file's contents. Drivers can register and deregister entries in this tree at any time, and a special section of the tree—appearing under the /proc/sys directory—is reserved for kernel variables. Files under this tree are managed by a set of common handlers that allow both reading and writing of these variables, so a system administrator can tune the value of kernel parameters simply by writing out the new desired values in ASCII decimal to the appropriate file.
To allow efficient access to these variables from within applications, the /proc/sys subtree is made available through a special system call, sysctl(), that reads and writes the same variables in binary, rather than in text, without the overhead of the file system. sysctl() is not an extra facility; it simply reads the /proc dynamic entry tree to identify the variables to which the application is referring.
18.8 Input and Output
To the user, the I/O system in Linux looks much like that in any UNIX system. That is, to the extent possible, all device drivers appear as normal files. Users can open an access channel to a device in the same way they open any other file—devices can appear as objects within the file system. The system administrator can create special files within a file system that contain references to a specific device driver, and a user opening such a file will be able to read from and write to the device referenced. By using the normal file-protection system, which determines who can access which file, the administrator can set access permissions for each device.
Linux splits all devices into three classes: block devices, character devices, and network devices. Figure 18.8 illustrates the overall structure of the device-driver system.
Block devices include all devices that allow random access to completely independent, fixed-sized blocks of data, including hard disks and floppy disks, CD-ROMs and Blu-ray discs, and flash memory. Block devices are typically used to store file systems, but direct access to a block device is also allowed so that programs can create and repair the file system that the device contains. Applications can also access these block devices directly if they wish. For example, a database application may prefer to perform its own fine-tuned layout of data onto a disk rather than using the general-purpose file system.
Character devices include most other devices, such as mice and keyboards. The fundamental difference between block and character devices is random access—block devices are accessed randomly, while character devices are accessed serially. For example, seeking to a certain position in a file might be supported for a DVD but makes no sense for a pointing device such as a mouse.
Network devices are dealt with differently from block and character devices. Users cannot directly transfer data to network devices. Instead, they must communicate indirectly by opening a connection to the kernel's networking subsystem. We discuss the interface to network devices separately in Section 18.10.
18.8.1 Block Devices
Block devices provide the main interface to all disk devices in a system. Performance is particularly important for disks, and the block-device system must provide functionality to ensure that disk access is as fast as possible. This functionality is achieved through the scheduling of I/O operations.
In the context of block devices, a block represents the unit with which the kernel performs I/O. When a block is read into memory, it is stored in a buffer. The request manager is the layer of software that manages the reading and writing of buffer contents to and from a block-device driver.
A separate list of requests is kept for each block-device driver. Traditionally, these requests have been scheduled according to a unidirectional-elevator (C-SCAN) algorithm that exploits the order in which requests are inserted in and removed from the lists. The request lists are maintained in sorted order of increasing starting-sector number. When a request is accepted for processing by a block-device driver, it is not removed from the list. It is removed only after the I/O is complete, at which point the driver continues with the next request in the list, even if new requests have been inserted in the list before the active request. As new I/O requests are made, the request manager attempts to merge requests in the lists.
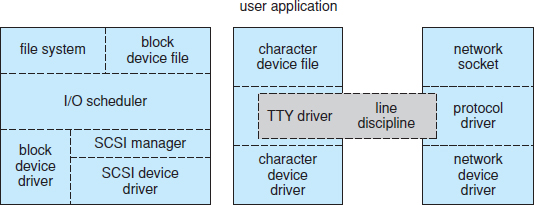
Figure 18.8 Device-driver block structure.
Linux kernel version 2.6 introduced a new I/O scheduling algorithm. Although a simple elevator algorithm remains available, the default I/O scheduler is now the Completely Fair Queueing (CFQ) scheduler. The CFQ I/O scheduler is fundamentally different from elevator-based algorithms. Instead of sorting requests into a list, CFQ maintains a set of lists—by default, one for each process. Requests originating from a process go in that process's list. For example, if two processes are issuing I/O requests, CFQ will maintain two separate lists of requests, one for each process. The lists are maintained according to the C-SCAN algorithm.
CFQ services the lists differently as well. Where a traditional C-SCAN algorithm is indifferent to a specific process, CFQ services each process's list round-robin. It pulls a configurable number of requests (by default, four) from each list before moving on to the next. This method results in fairness at the process level—each process receives an equal fraction of the disk's bandwidth. The result is beneficial with interactive workloads where I/O latency is important. In practice, however, CFQ performs well with most workloads.
18.8.2 Character Devices
A character-device driver can be almost any device driver that does not offer random access to fixed blocks of data. Any character-device drivers registered to the Linux kernel must also register a set of functions that implement the file I/O operations that the driver can handle. The kernel performs almost no preprocessing of a file read or write request to a character device. It simply passes the request to the device in question and lets the device deal with the request.
The main exception to this rule is the special subset of character-device drivers that implement terminal devices. The kernel maintains a standard interface to these drivers by means of a set of tty_struct structures. Each of these structures provides buffering and flow control on the data stream from the terminal device and feeds those data to a line discipline.
A line discipline is an interpreter for the information from the terminal device. The most common line discipline is the tty discipline, which glues the terminal's data stream onto the standard input and output streams of a user's running processes, allowing those processes to communicate directly with the user's terminal. This job is complicated by the fact that several such processes may be running simultaneously, and the tty line discipline is responsible for attaching and detaching the terminal's input and output from the various processes connected to it as those processes are suspended or awakened by the user.
Other line disciplines also are implemented that have nothing to do with I/O to a user process. The PPP and SLIP networking protocols are ways of encoding a networking connection over a terminal device such as a serial line. These protocols are implemented under Linux as drivers that at one end appear to the terminal system as line disciplines and at the other end appear to the networking system as network-device drivers. After one of these line disciplines has been enabled on a terminal device, any data appearing on that terminal will be routed directly to the appropriate network-device driver.
18.9 Interprocess Communication
Linux provides a rich environment for processes to communicate with each other. Communication may be just a matter of letting another process know that some event has occurred, or it may involve transferring data from one process to another.
18.9.1 Synchronization and Signals
The standard Linux mechanism for informing a process that an event has occurred is the signal. Signals can be sent from any process to any other process, with restrictions on signals sent to processes owned by another user. However, a limited number of signals are available, and they cannot carry information. Only the fact that a signal has occurred is available to a process. Signals are not generated only by processes. The kernel also generates signals internally. For example, it can send a signal to a server process when data arrive on a network channel, to a parent process when a child terminates, or to a waiting process when a timer expires.
Internally, the Linux kernel does not use signals to communicate with processes running in kernel mode. If a kernel-mode process is expecting an event to occur, it will not use signals to receive notification of that event. Rather, communication about incoming asynchronous events within the kernel takes place through the use of scheduling states and wait_queue structures. These mechanisms allow kernel-mode processes to inform one another about relevant events, and they also allow events to be generated by device drivers or by the networking system. Whenever a process wants to wait for some event to complete, it places itself on a wait queue associated with that event and tells the scheduler that it is no longer eligible for execution. Once the event has completed, every process on the wait queue will be awoken. This procedure allows multiple processes to wait for a single event. For example, if several processes are trying to read a file from a disk, then they will all be awakened once the data have been read into memory successfully.
Although signals have always been the main mechanism for communicating asynchronous events among processes, Linux also implements the semaphore mechanism of System V UNIX. A process can wait on a semaphore as easily as it can wait for a signal, but semaphores have two advantages: large numbers of semaphores can be shared among multiple independent processes, and operations on multiple semaphores can be performed atomically. Internally, the standard Linux wait queue mechanism synchronizes processes that are communicating with semaphores.
18.9.2 Passing of Data among Processes
Linux offers several mechanisms for passing data among processes. The standard UNIX pipe mechanism allows a child process to inherit a communication channel from its parent; data written to one end of the pipe can be read at the other. Under Linux, pipes appear as just another type of inode to virtual file system software, and each pipe has a pair of wait queues to synchronize the reader and writer. UNIX also defines a set of networking facilities that can send streams of data to both local and remote processes. Networking is covered in Section 18.10.
Another process communications method, shared memory, offers an extremely fast way to communicate large or small amounts of data. Any data written by one process to a shared memory region can be read immediately by any other process that has mapped that region into its address space. The main disadvantage of shared memory is that, on its own, it offers no synchronization. A process can neither ask the operating system whether a piece of shared memory has been written to nor suspend execution until such a write occurs. Shared memory becomes particularly powerful when used in conjunction with another interprocess-communication mechanism that provides the missing synchronization.
A shared-memory region in Linux is a persistent object that can be created or deleted by processes. Such an object is treated as though it were a small, independent address space. The Linux paging algorithms can elect to page shared-memory pages out to disk, just as they can page out a process's data pages. The shared-memory object acts as a backing store for shared-memory regions, just as a file can act as a backing store for a memory-mapped memory region. When a file is mapped into a virtual address space region, then any page faults that occur cause the appropriate page of the file to be mapped into virtual memory. Similarly, shared-memory mappings direct page faults to map in pages from a persistent shared-memory object. Also just as for files, shared-memory objects remember their contents even if no processes are currently mapping them into virtual memory.
18.10 Network Structure
Networking is a key area of functionality for Linux. Not only does Linux support the standard Internet protocols used for most UNIX-to-UNIX communications, but it also implements a number of protocols native to other, non-UNIX operating systems. In particular, since Linux was originally implemented primarily on PCs, rather than on large workstations or on server-class systems, it supports many of the protocols typically used on PC networks, such as AppleTalk and IPX.
Internally, networking in the Linux kernel is implemented by three layers of software:
- The socket interface
- Protocol drivers
- Network-device drivers
User applications perform all networking requests through the socket interface. This interface is designed to look like the 4.3 BSD socket layer, so that any programs designed to make use of Berkeley sockets will run on Linux without any source-code changes. This interface is described in Section A.9.1. The BSD socket interface is sufficiently general to represent network addresses for a wide range of networking protocols. This single interface is used in Linux to access not just those protocols implemented on standard BSD systems but all the protocols supported by the system.
The next layer of software is the protocol stack, which is similar in organization to BSD'sown framework. Whenever any networking data arrive at this layer, either from an application's socket or from a network-device driver, the data are expected to have been tagged with an identifier specifying which network protocol they contain. Protocols can communicate with one another if they desire; for example, within the Internet protocol set, separate protocols manage routing, error reporting, and reliable retransmission of lost data.
The protocol layer may rewrite packets, create new packets, split or reassemble packets into fragments, or simply discard incoming data. Ultimately, once the protocol layer has finished processing a set of packets, it passes them on, either upward to the socket interface if the data are destined for a local connection or downward to a device driver if the data need to be transmitted remotely. The protocol layer decides to which socket or device it will send the packet.
All communication between the layers of the networking stack is performed by passing single skbuff (socket buffer) structures. Each of these structures contains a set of pointers into a single continuous area of memory, representing a buffer inside which network packets can be constructed. The valid data in a skbuff do not need to start at the beginning of the skbuff's buffer, and they do not need to run to the end. The networking code can add data to or trim data from either end of the packet, as long as the result still fits into the skbuff. This capacity is especially important on modern microprocessors, where improvements in CPU speed have far outstripped the performance of main memory. The skbuff architecture allows flexibility in manipulating packet headers and checksums while avoiding any unnecessary data copying.
The most important set of protocols in the Linux networking system is the TCP/IP protocol suite. This suite comprises a number of separate protocols. The IP protocol implements routing between different hosts anywhere on the network. On top of the routing protocol are the UDP, TCP, and ICMP protocols. The UDP protocol carries arbitrary individual datagrams between hosts. The TCP protocol implements reliable connections between hosts with guaranteed in-order delivery of packets and automatic retransmission of lost data. The ICMP protocol carries various error and status messages between hosts.
Each packet (skbuff) arriving at the networking stack's protocol software is expected to be already tagged with an internal identifier indicating the protocol to which the packet is relevant. Different networking-device drivers encode the protocol type in different ways; thus, the protocol for incoming data must be identified in the device driver. The device driver uses a hash table of known networking-protocol identifiers to look up the appropriate protocol and passes the packet to that protocol. New protocols can be added to the hash table as kernel-loadable modules.
Incoming IP packets are delivered to the IP driver. The job of this layer is to perform routing. After deciding where the packet is to be sent, the IP driver forwards the packet to the appropriate internal protocol driver to be delivered locally or injects it back into a selected network-device-driver queue to be forwarded to another host. It performs the routing decision using two tables: the persistent forwarding information base (FIB) and a cache of recent routing decisions. The FIB holds routing-configuration information and can specify routes based either on a specific destination address or on a wildcard representing multiple destinations. The FIB is organized as a set of hash tables indexed by destination address; the tables representing the most specific routes are always searched first. Successful lookups from this table are added to the route-caching table, which caches routes only by specific destination. No wildcards are stored in the cache, so lookups can be made quickly. An entry in the route cache expires after a fixed period with no hits.
At various stages, the IP software passes packets to a separate section of code for firewall management—selective filtering of packets according to arbitrary criteria, usually for security purposes. The firewall manager maintains a number of separate firewall chains and allows a skbuff to be matched against any chain. Chains are reserved for separate purposes: one is used for forwarded packets, one for packets being input to this host, and one for data generated at this host. Each chain is held as an ordered list of rules, where a rule specifies one of a number of possible firewall-decision functions plus some arbitrary data for matching purposes.
Two other functions performed by the IP driver are disassembly and reassembly of large packets. If an outgoing packet is too large to be queued to a device, it is simply split up into smaller fragments, which are all queued to the driver. At the receiving host, these fragments must be reassembled. The IP driver maintains an ipfrag object for each fragment awaiting reassembly and an ipq for each datagram being assembled. Incoming fragments are matched against each known ipq. If a match is found, the fragment is added to it; otherwise, a new ipq is created. Once the final fragment has arrived for a ipq, a completely new skbuff is constructed to hold the new packet, and this packet is passed back into the IP driver.
Packets identified by the IP as destined for this host are passed on to one of the other protocol drivers. The UDP and TCP protocols share a means of associating packets with source and destination sockets: each connected pair of sockets is uniquely identified by its source and destination addresses and by the source and destination port numbers. The socket lists are linked to hash tables keyed on these four address and port values for socket lookup on incoming packets. The TCP protocol has to deal with unreliable connections, so it maintains ordered lists of unacknowledged outgoing packets to retransmit after a timeout and of incoming out-of-order packets to be presented to the socket when the missing data have arrived.
18.11 Security
Linux's security model is closely related to typical UNIX security mechanisms. The security concerns can be classified in two groups:
- Authentication. Making sure that nobody can access the system without first proving that she has entry rights
- Access control. Providing a mechanism for checking whether a user has the right to access a certain object and preventing access to objects as required
18.11.1 Authentication
Authentication in UNIX has typically been performed through the use of a publicly readable password file. Auser's password is combined with a random “salt” value, and the result is encoded with a one-way transformation function and stored in the password file. The use of the one-way function means that the original password cannot be deduced from the password file except by trial and error. When a user presents a password to the system, the password is recombined with the salt value stored in the password file and passed through the same one-way transformation. If the result matches the contents of the password file, then the password is accepted.
Historically, UNIX implementations of this mechanism have had several drawbacks. Passwords were often limited to eight characters, and the number of possible salt values was so low that an attacker could easily combine a dictionary of commonly used passwords with every possible salt value and have a good chance of matching one or more passwords in the password file, gaining unauthorized access to any accounts compromised as a result. Extensions to the password mechanism have been introduced that keep the encrypted password secret in a file that is not publicly readable, that allow longer passwords, or that use more secure methods of encoding the password. Other authentication mechanisms have been introduced that limit the periods during which a user is permitted to connect to the system. Also, mechanisms exist to distribute authentication information to all the related systems in a network.
A new security mechanism has been developed by UNIX vendors to address authentication problems. The pluggable authentication modules (PAM) system is based on a shared library that can be used by any system component that needs to authenticate users. An implementation of this system is available under Linux. PAM allows authentication modules to be loaded on demand as specified in a system-wide configuration file. If a new authentication mechanism is added at a later date, it can be added to the configuration file, and all system components will immediately be able to take advantage of it. PAM modules can specify authentication methods, account restrictions, session-setup functions, and password-changing functions (so that, when users change their passwords, all the necessary authentication mechanisms can be updated at once).
18.11.2 Access Control
Access control under UNIX systems, including Linux, is performed through the use of unique numeric identifiers. A user identifier (UID) identifies a single user or a single set of access rights. A group identifier (GID) is an extra identifier that can be used to identify rights belonging to more than one user.
Access control is applied to various objects in the system. Every file available in the system is protected by the standard access-control mechanism. In addition, other shared objects, such as shared-memory sections and semaphores, employ the same access system.
Every object in a UNIX system under user and group access control has a single UID and a single GID associated with it. User processes also have a single UID, but they may have more than one GID. If a process's UID matches the UID of an object, then the process has user rights or owner rights to that object. If the UIDs do not match but any GID of the process matches the object's GID, then group rights are conferred; otherwise, the process has world rights to the object.
Linux performs access control by assigning objects a protection mask that specifies which access modes—read, write, or execute—are to be granted to processes with owner, group, or world access. Thus, the owner of an object might have full read, write, and execute access to a file; other users in a certain group might be given read access but denied write access; and everybody else might be given no access at all.
The only exception is the privileged root UID. A process with this special UID is granted automatic access to any object in the system, bypassing normal access checks. Such processes are also granted permission to perform privileged operations, such as reading any physical memory or opening reserved network sockets. This mechanism allows the kernel to prevent normal users from accessing these resources: most of the kernel's key internal resources are implicitly owned by the root UID.
Linux implements the standard UNIX setuid mechanism described in Section A.3.2. This mechanism allows a program to run with privileges different from those of the user running the program. For example, the lpr program (which submits a job to a print queue) has access to the system's print queues even if the user running that program does not. The UNIX implementation of setuid distinguishes between a process's real and effective UID. The real UID is that of the user running the program; the effective UID is that of the file's owner.
Under Linux, this mechanism is augmented in two ways. First, Linux implements the POSIX specification's saved user-id mechanism, which allows a process to drop and reacquire its effective UID repeatedly. For security reasons, a program may want to perform most of its operations in a safe mode, waiving the privileges granted by its setuid status; but it may wish to perform selected operations with all its privileges. Standard UNIX implementations achieve this capacity only by swapping the real and effective UIDs. When this is done, the previous effective UID is remembered, but the program's real UID does not always correspond to the UID of the user running the program. Saved UIDs allow a process to set its effective UID to its real UID and then return to the previous value of its effective UID without having to modify the real UID at any time.
The second enhancement provided by Linux is the addition of a process characteristic that grants just a subset of the rights of the effective UID. The fsuid and fsgid process properties are used when access rights are granted to files. The appropriate property is set every time the effective UID or GID is set. However, the fsuid and fsgid can be set independently of the effective ids, allowing a process to access files on behalf of another user without taking on the identity of that other user in any other way. Specifically, server processes can use this mechanism to serve files to a certain user without becoming vulnerable to being killed or suspended by that user.
Finally, Linux provides a mechanism for flexible passing of rights from one program to another—a mechanism that has become common in modern versions of UNIX. When a local network socket has been set up between any two processes on the system, either of those processes may send to the other process a file descriptor for one of its open files; the other process receives a duplicate file descriptor for the same file. This mechanism allows a client to pass access to a single file selectively to some server process without granting that process any other privileges. For example, it is no longer necessary for a print server to be able to read all the files of a user who submits a new print job. The print client can simply pass the server file descriptors for any files to be printed, denying the server access to any of the user's other files.
18.12 Summary
Linux is a modern, free operating system based on UNIX standards. It has been designed to run efficiently and reliably on common PC hardware; it also runs on a variety of other platforms, such as mobile phones. It provides a programming interface and user interface compatible with standard UNIX systems and can run a large number of UNIX applications, including an increasing number of commercially supported applications.
Linux has not evolved in a vacuum. A complete Linux system includes many components that were developed independently of Linux. The core Linux operating-system kernel is entirely original, but it allows much existing free UNIX software to run, resulting in an entire UNIX-compatible operating system free from proprietary code.
The Linux kernel is implemented as a traditional monolithic kernel for performance reasons, but it is modular enough in design to allow most drivers to be dynamically loaded and unloaded at run time.
Linux is a multiuser system, providing protection between processes and running multiple processes according to a time-sharing scheduler. Newly created processes can share selective parts of their execution environment with their parent processes, allowing multithreaded programming. Interprocess communication is supported by both System V mechanisms—message queues, semaphores, and shared memory—and BSD's socket interface. Multiple networking protocols can be accessed simultaneously through the socket interface.
The memory-management system uses page sharing and copy-on-write to minimize the duplication of data shared by different processes. Pages are loaded on demand when they are first referenced and are paged back out to backing store according to an LFU algorithm if physical memory needs to be reclaimed.
To the user, the file system appears as a hierarchical directory tree that obeys UNIX semantics. Internally, Linux uses an abstraction layer to manage multiple file systems. Device-oriented, networked, and virtual file systems are supported. Device-oriented file systems access disk storage through a page cache that is unified with the virtual memory system.
Practice Exercises
18.1 Dynamically loadable kernel modules give flexibility when drivers are added to a system, but do they have disadvantages too? Under what circumstances would a kernel be compiled into a single binary file, and when would it be better to keep it split into modules? Explain your answer.
18.2 Multithreading is a commonly used programming technique. Describe three different ways to implement threads, and compare these three methods with the Linux clone() mechanism. When might using each alternative mechanism be better or worse than using clones?
18.3 The Linux kernel does not allow paging out of kernel memory. What effect does this restriction have on the kernel's design? What are two advantages and two disadvantages of this design decision?
18.4 Discuss three advantages of dynamic (shared) linkage of libraries compared with static linkage. Describe two cases in which static linkage is preferable.
18.5 Compare the use of networking sockets with the use of shared memory as a mechanism for communicating data between processes on a single computer. What are the advantages of each method? When might each be preferred?
18.6 At one time, UNIX systems used disk-layout optimizations based on the rotation position of disk data, but modern implementations, including Linux, simply optimize for sequential data access. Why do they do so? Of what hardware characteristics does sequential access take advantage? Why is rotational optimization no longer so useful?
Exercises
18.7 What are the advantages and disadvantages of writing an operating system in a high-level language, such as C?
18.8 In what circumstances is the system-call sequence fork() exec() most appropriate? When is vfork() preferable?
18.9 What socket type should be used to implement an intercomputer file-transfer program? What type should be used for a program that periodically tests to see whether another computer is up on the network? Explain your answer.
18.10 Linux runs on a variety of hardware platforms. What steps must Linux developers take to ensure that the system is portable to different processors and memory-management architectures and to minimize the amount of architecture-specific kernel code?
18.11 What are the advantages and disadvantages of making only some of the symbols defined inside a kernel accessible to a loadable kernel module?
18.12 What are the primary goals of the conflict-resolution mechanism used by the Linux kernel for loading kernel modules?
18.13 Discuss how the clone() operation supported by Linux is used to support both processes and threads.
18.14 Would you classify Linux threads as user-level threads or as kernel-level threads? Support your answer with the appropriate arguments.
18.15 What extra costs are incurred in the creation and scheduling of a process, compared with the cost of a cloned thread?
18.16 How does Linux's Completely Fair Scheduler (CFS) provide improved fairness over a traditional UNIX process scheduler? When is the fairness guaranteed?
18.17 What are the two configurable variables of the Completely Fair Scheduler (CFS)? What are the pros and cons of setting each of them to very small and very large values?
18.18 The Linux scheduler implements “soft” real-time scheduling. What features necessary for certain real-time programming tasks are missing? How might they be added to the kernel? What are the costs (downsides) of such features?
18.19 Under what circumstances would a user process request an operation that results in the allocation of a demand-zero memory region?
18.20 What scenarios would cause a page of memory to be mapped into a user program's address space with the copy-on-write attribute enabled?
18.21 In Linux, shared libraries perform many operations central to the operating system. What is the advantage of keeping this functionality out of the kernel? Are there any drawbacks? Explain your answer.
18.22 What are the benefits of a journaling file system such as Linux's ext3? What are the costs? Why does ext3 provide the option to journal only metadata?
18.23 The directory structure of a Linux operating system could include files corresponding to several different file systems, including the Linux /proc file system. How might the need to support different file-system types affect the structure of the Linux kernel?
18.24 In what ways does the Linux setuid feature differ from the setuid feature SVR4?
18.25 The Linux source code is freely and widely available over the Internet and from CD-ROM vendors. What are three implications of this availability for the security of the Linux system?
Bibliographical Notes
The Linux system is a product of the Internet; as a result, much of the available documentation on Linux is available in some form on the Internet. The following key sites reference most of the useful information available:
- The Linux Cross-Reference Page (LXR) (http://lxr.linux.no) maintains current listings of the Linux kernel, browsable via the Web and fully cross-referenced.
- The Kernel Hackers’ Guide provides a helpful overview of the Linux kernel components and internals and is located at http://tldp.org/LDP/tlk/tlk.html.
- The Linux Weekly News (LWN) (http://lwn.net) provides weekly Linux-related news, including a very well researched subsection on Linux kernel news.
Many mailing lists devoted to Linux are also available. The most important are maintained by a mailing-list manager that can be reached at the e-mail address [email protected]. Send e-mail to this address with the single line “help” in the mail's body for information on how to access the list server and to subscribe to any lists.
Finally, the Linux system itself can be obtained over the Internet. Complete Linux distributions are available from the home sites of the companies concerned, and the Linux community also maintains archives of current system components at several places on the Internet. The most important is ftp://ftp.kernel.org/pub/linux.
In addition to investigating Internet resources, you can read about the internals of the Linux kernel in [Mauerer (2008)] and [Love (2010)].
Bibliography
[Love (2010)] R. Love, Linux Kernel Development, Third Edition, Developer's Library (2010).
[Mauerer (2008)] W. Mauerer, Professional Linux Kernel Architecture, John Wiley and Sons (2008).