10
Cognitive Radio Contribution to Meeting Vehicular Communication Needs of Autonomous Vehicles
Francine KRIEF1, Hasnaâ ANISS2, Marion BERBINEAU2 and Killian LE PAGE3
1 ENSEIRB-MATMECA, Bordeaux, France
2 IFSTTAR, Bordeaux, France
3 ALTEN, Boulogne-Billancourt, France
10.1. Introduction
Vehicular communication needs will evolve and experience a boom due to the ascent of connected and autonomous vehicles (AV). Connectivity of various types such as vehicle-to-vehicle (V2V), vehicle-to-infrastructure (V2I), vehicle-to-pedestrian (V2P), and more broadly vehicle to X enables the deployment of a wide variety of applications aiming first of all to improve road safety, and also user comfort during travel. In the context of AVs, new services will emerge, such as platooning, which enables a human-driven car to guide AVs gathered in a convoy through the urban network. Car sharing and the Internet of Things will further broaden the range of services offered. Although currently few, these applications will have various demands in terms of quality of service (QoS) and communications security, which will need to be addressed. Communication link reliability will require self-adaptation of radio access technology, which is made possible by cognitive radio (CR), a technology that is able to detect free frequency bands and adapt its transmission parameters to communication needs and constraints. This concept was introduced by Mitola and Maguire (1999).
CR is defined by its perception, adaptation and cognition capacities. It is characterized by its capacities in terms of spectral interoperability, efficiency, optimization of radio resources and improvement of communications reliability, which are of significant interest to the connected AV. The first prototypes were successfully developed to meet the demands of military communications and those of public security. Besides being able to perceive and adapt to its radio-electrical environment, CR also has learning capacities via artificial intelligence techniques.
Section 10.2 introduces the AV and its main components. Section 10.3 describes applications of vehicle communication and their constraints in terms of QoS. Section 10.4 presents various communication architectures. Section 10.5 highlights the contribution of CR to the vehicular field. This section also presents a state-of-the-art of the main research works in the CR field for vehicular networks. Section 10.6 clarifies our positioning within SERENA project. Finally, section 10.7 concludes this chapter.
10.2. Autonomous vehicles
The AV, the driving of which is partly or fully automated, is currently one of the main technological challenges. Its ascent is expected to radically change the mobility, safety and behavior of road users.
Research on AVs, or rather on automated and connected vehicles, is very active and covers many domains, such as connectivity through digital infrastructure, environment sensing technologies, safe and accurate localization, high definition cartography, the legal field with all regulatory and legal aspects related to responsibility (vehicle owners, manufacturers, State, communities) but also philosophy and ethics. What is the moral responsibility of the developer of artificial intelligence behind the vehicle?
10.2.1. Automation levels
The Society of Automotive Engineers (SAE) identifies six levels of driver assistance, ranging from 0 to 5. A vehicle is actually considered autonomous from level 5 up. At lower levels, a vehicle is not yet considered autonomous, as it requires driver presence. The automation levels are described in Table 10.1 (Shladover et al. 2014).
10.2.2. The main components
A car is referred to as autonomous if its driving is partly or fully automated through various sensors enabling the perception of the environment and connectivity to road infrastructure in order to anticipate the events on the road. The various elements enabling AV to perceive, localize and communicate are summarized in Figure 10.1.

Figure 10.1. Autonomous vehicle (Hubaux 2005)
The forward and back perception systems are able to perceive the physical environment in order to prevent a potential collision. These systems are of a multisensor type and include anti-collision radar, lidar and imaging systems in the visible spectrum and sometimes in the infrared spectrum. Certain systems also consider audio sensors. The data collection and processing module is responsible for data recovery. It is directly linked to the control area network (CAN) bus of the vehicle and enables the access to data such as speed, acceleration or temperature and humidity, but also to the state of the vehicle and its environment.
Table 10.1. Various SAE automation levels (source: 2014 SAE International)
| SAE level | Name | Description | Driving execution (steering wheel, acceleration, braking) | Monitoring of driving environment | Driving take-over | System capacity | |
| Human monitoring of the driving environment | |||||||
| 0 | No automation | Full time execution by the human driver of all aspects of dynamic driving task, even when reinforced by alert or intervention systems | Human driver | Human driver | Human driver | N/A | |
| 1 | Driving assistance | Execution (specific driving mode) by the driving-aid system of maneuvers, either on direction, or on acceleration/deceleration, by means of information on the driving environment. The human driver executes all the other aspects of the dynamic driving task. | Human and system driver | Human driver | Human driver | Certain driving modes | |
| 2 | Partial automation | Execution (specific driving mode) by one or several driving-aid systems of actions both on the direction and on acceleration/deceleration by means of information from the driving environment. The human driver executes all the other aspects of the dynamic driving task. | System | Human driver | Human driver | Certain driving modes | |
| The automated driving system monitors the driving environment | |||||||
| 3 | Conditional automation | Execution (specific driving mode) of all the aspects of the dynamic driving task by an automated driving system with the expectation that the human driver will appropriately respond to an intervention request | System | System | Human driver | Certain driving modes | |
| 4 | Strong automation | Execution (specific driving mode) of all the aspects of the dynamic driving task by an automated driving system, even though the human driver does not appropriately respond to the intervention request | System | System | System | Certain driving modes | |
| 5 | Full automation | Full time execution by an automated driving system of all the aspects of the dynamic driving task under all road and environmental conditions that could be managed by a human driver | System | System | System | All driving modes | |
Nowadays, communication equipment relies on the ITS-G5 system and the existing cellular systems. It enables communication between vehicles and infrastructure, but also intervehicle communication. It is particularly responsible for the transmission of alerts to control centers in case of detection of potentially dangerous situations.
The human-machine interface can be used by the driver to interact with the vehicle.
The localization system enables the geo-positioning of the AV, which will be all the more accurate as it is associated with high definition mapping and merging of data issued from multiple sensors.
For further details, the reader is referred to the thematic report “Perspective on the autonomous vehicle” conducted by IFSTTAR (Institut français des sciences et technologies des transports, de l’aménagement et des réseaux [French Institute of Science and Technology for Transport, Development and Networks])1.
10.3. Connected vehicle
Cooperative Intelligent Transport Systems (C-ITSs) based on vehicular communications enable the deployment of new applications. These can be classified into several categories; road safety and entertainment are worth being mentioned here. The needs in terms of QoS and the performances vary depending on the type of application.
10.3.1. Road safety applications
Road safety applications are the most critical. It is one of the categories with the highest demands in terms of QoS. With no claim to provide an exhaustive list, examples of applications range from collision detection to accident management, passing through the detection of pedestrians on the road (Dar et al. 2010; Cunha et al. 2016).
- – Collision detection: the objective is upstream detection of the risk of collision with an arbitrary obstacle. The most critical points for communication are latency, which must be the lowest possible in order to transmit information as fast as possible, and accuracy of vehicle positioning (mobile or static) and of the obstacle.
- – Accident management: the objective is to detect accidents that are ongoing or predictable in the very short term in order to change driver behavior, for example by suggesting a new route that bypasses the accident. In this case, a sufficiently wide radio range is required for the best possible anticipation. Latency must also be very low to enable making a decision as rapidly as possible. Finally, referring to throughput, it must be sufficiently significant in order to transmit all the required information, following the encountered accident.
- – Detection of pedestrians crossing the road: the objective is to notify the driver on the presence of a pedestrian unexpectedly arriving on the road. The driver (or the AV) can thus brake or change the direction of its vehicle to avoid any accident with the pedestrian. Latency must therefore be sufficiently low to make a real-time reaction possible and thus avoid an accident. A range of at least 200 m is required to best anticipate the passage of a pedestrian.
The referenced works of Dar et al. (2010), Amjad et al. (2018), MacHardy (2018), and Mir and Filali (2018) propose certain performance characteristics required for the implementation of these use cases, as summarized in Table 10.2.
Table 10.2. Constraints expressed for road safety vehicular applications
| Application | Latency (ms) | Throughput (Mo/s | Distance (m) |
| Collision detection | 10–100 | From 0.0625 to 87.5 | Urban environment: 500 Highway: 2,000 |
| Accident management | Of the order of millisecond | From 0.125 to 0.75 | From less than 500 to approximately 1,000 |
| Pedestrian detection | 20–100 | From 0.0625 to 87.5 | ≥200 |
10.3.2. Entertainment applications
Entertainment applications are the least critical in terms of QoS. By their own nature, these applications do not require very high priorities, unlike the previously mentioned applications. The needs are considered on a case by case basis. Let us consider two different examples from Campolo et al. (2017): video streaming and Internet browsing.
- – Video streaming: this application broadcasts or reads video flows. Latency must be the lowest possible to provide the user with good quality experience. Throughput must be dimensioned according to the expected quality. For very good video quality, throughput must be significant, while it can be smaller for lower video quality. The radio range must be wide enough to enable access to content during a long route without any interruption.
- – Internet browsing: the user must have access to Internet pages. Latency is less important compared to other applications, while being low enough to meet the quality of user experience. The throughput required for smooth browsing may depend on the visited content, but the latter does not need to be as significant as for other applications. Finally, the radio range must be wide to enable continuous browsing.
The works of Campolo et al. (2017) and Dar et al. (2010) estimate the minimal required performances, as summarized in Table 10.3.
Table 10.3. Constraints expressed for vehicular entertainment applications
| Application | Latency (ms) | Throughput (Mo/s) | Range (m) |
| Video streaming | Lowest possible | 1.875 (for UHD video) | >1,000 |
| Internet browsing | 100 ms | 0.0625 | >1,000 |
10.4. Communication architectures
C-ITS vehicular networks rely on a set of ISO (International Organization for Standardization) and ETSI (European Telecommunication Standards Institute) standards defining the architecture of each component (vehicle, roadside unit, road management center, etc., see Figure 10.2) on the basis of an ITS (Intelligent Transport System) protocol stack and an OSI (Open Systems Interconnexion) protocol stack.

Figure 10.2. Illustration of C-ITS systems (ETSI 2010)
Each subsystem illustrated in Figure 10.2 is defined from the same architecture, which is composed of (see Figure 10.3):
- – an “Access” layer, which represents OSI layers 1 and 2;
- – a “Network and transport” layer, which represents OSI layers 3 and 4;
- – an “Installation” layer, which represents OSI layers 5, 6 and 7;
- – an “Application” layer, which manages the production of C-ITS service;
- – a cross “Security” layer for message securing;
- – a cross “Management” layer, which manages the interaction between various layers.
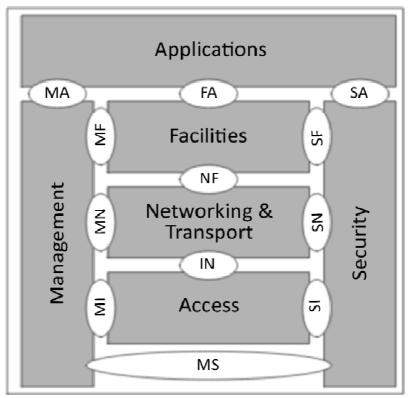
Figure 10.3. Reference architecture of an ITS station (ETSI 2010)
In terms of access, two types of communication are used:
- – in ad hoc mode, ITS-G5; in this case, the transport is made either in IP or more generally using geo-networking (ETSI 2014);
- – cellular (3G/4G); the link is then exclusively IP.
These two access modes are often coupled in order to increase service coverage; this is the hybrid mode.
10.4.1. ITS-G5
The ITS-G5 system is governed by a set of ETSI standards based, for the physical layer/support access control, on the IEEE 802.11p (IEEE 2010) standard.
ETSI allocated three frequency bands in the band of 5 GHz for C-ITS systems. Each band is divided into 10 MHz channels. The first band, referred to as ITS-G5A, of 30 MHz, is dedicated to road safety applications. The second band of 20 MHz, referred to as ITS-G5B, is dedicated to other applications. The last band of 20 MHz (ITS-G5D) is dedicated to future use.
| Frequency interval | Use | Regulations | Harmonized standard | |
| ITS-G5A | 5,875–5,905 | ITS applications for road safety | Decision of the commission | EN 302571 |
| ITS-G5B | 5,855–5,875 | ITS applications not related to road safety | ECC Recommendation | EN 302571 |
| ITS-G5C | 5,470–5,725 | RLAN (BRAN, WLAN) | ERC decision | EN 301893 |
| ITS-G5D | 5,905–5,925 | Applications ITS futures | ECC decision | EN 302571 |
Table 10.5. Table of ITS-G5 frequency allocation in Europe (IEEE 2010)
| Channel type | Central frequency (MHz) | Channel number IEEE 802.11 | Channel spacing (MHz) | Throughput by default (Mbit/s) | Limit power rate (dBm PIRE) | Limit power density rate (dBm/MHz) |
| G5-CCH | 5,900 | 180 | 10 | 6 | 33 | 23 |
| G5-SCH1 | 5,880 | 176 | 10 | 6 | 33 | 23 |
| G5-SCH2 | 5,890 | 178 | 10 | 12 | 23 | 13 |
| G5-SCH3 | 5,870 | 174 | 10 | 6 | 23 | 13 |
| G5-SCH4 | 5,860 | 172 | 10 | 6 | 0 | – 10 |
| G5-SCH5 | 5,850 | 182 | 10 | 6 | 0 | – 10 |
| G5-SCH6 | 5,910 | 184 | 10 | 6 | 0 | – 10 |
| G5-SCH7 | As described in the band: 5,470 MHz to 5,725 MHz | 94–145 | Several | Depends on channel spacing | 30 (DFS master) | 17 |
| 23 (DFS slave) | 10 |
Taking over numerical throughputs of 3, 6 and 12 Mbps is compulsory for ITS stations.
Support access control (MAC)
To enable the use of 802.11 standard in vehicular communications, the following functionalities were modified:
- – authentication of the MAC sublayer and association processes are deactivated;
- – energy saving is not authorized;
- – the security of 802.11 is not supported.
10.4.2. LTE-V2X
In 2016, the 3GPP standardization group published specifications for V2X communications relying on long-term evolution (LTE) technology referred to as “LTE V2X” (or C-V2X) to distinguish them from V2X 802.11p technology. Besides direct communication (V2V, V2I), C-V2X also supports long-distance communication on a cellular network (V2N). LTE-V2X standard supports two radio interfaces:
- – cellular interface Uu;
- – PC5 interface in charge with V2V communications. In mode 3, the cellular network allocates and manages the radio resources used by vehicles for their communications. On the other hand, in mode 4, the vehicles autonomously select the radio resources.
At the end of 2018, 3GPP published release 15: the first specification for 5G NR (New Radio). 5G follows LTE with a period of transition in which LTE will be upgraded because of 5G. One of the radio differences compared to LTE is a larger frequency band (from 700 MHz to 70 GHz), segmented according to the types of applications or environments (dense urban to rural). Moreover, the information will be processed as close as possible to the final user in order to improve system performances. Latencies are expected to be below 1 ms.
10.4.3. Hybrid communication
In Mannoni et al. (2019), after simulation of various communication modes (LTE-C-V2X, ITS-G5) the authors show that, despite a more significant range and an often higher throughput for the cellular mode, the performances of ITS-G5 remain higher than those of applications always requiring low latency, namely road safety applications. Nevertheless, in order to increase the penetration rate of C-ITS services, it may be relevant to use short- and long-range communications simultaneously for entertainment or information applications. Short-range communications remain dedicated to services related to transport security. The major hybridization principle is to enable the receipt, whatever the network used, of the same information. C-ITS messages are the same, irrespective of the chosen communication medium, and pass through a central unit enabling a geographical connection between all the cellular units. This requires that all the higher layers of the C-ITS stack are identical (application, installation and security layers). There are variations at the level of the network and transport layer and the access layer.
10.5. Contribution of CR to vehicular networks
CR is the combination of a so-called “software” radio with a decision-making module. This combination enables the dynamic adaptation of the radio system to its electromagnetic environment. As already mentioned, the concept of CR was introduced by J. Mitola in 1999 (Mitola and Maguire 1999). CR can be used in the vehicular domain in order to always remain connected despite the mobility and the variation of the type of telecommunication network available at a given moment along the vehicle path. This section first describes the specificities of CR, then presents its contribution to vehicular networks. This is followed by a state-of-the-art of the main research works in the field of CR for vehicular networks.
10.5.1. Cognitive radio
The main contribution of CR is better management of the radio-electrical spectrum, using frequency bands that are left vacant at a given instant, because of dynamic access to the spectrum. For this purpose, CR generally distinguishes between two user categories. The users referred to as primary can use the licensed bands (frequency bands of mobile operators, etc.) at any moment, based on adequate subscription. The second category of users is that of secondary users. In this category, the users cannot use the licensed bands unless they are free at the moment of use, there is no risk of generating interference and it is possible to change the band as soon as a primary user shows up. To be able to dynamically access the spectrum, the CR system must make its decisions based on the policy of spectrum allocation defined by the regulatory authorities. In general terms, CR can adapt to its environment because of electromagnetic environment sensing modules, spectrum analysis, wave shape recognition, decision making and the capacity for dynamic reconfiguration of the parameters of the radio system (throughput, frequencies, modulation, coding, etc.). The operation of CR follows a cycle known as a “cognition loop”, as illustrated in Figure 10.4.

Figure 10.4. Cognition loop
CR is a very active research domain. Indeed, the capacity of a radio system to analyze its environment, to choose the bands in which it can emit and to reconfigure are increasingly important characteristics for the cohabitation of various wireless telecommunication systems, for the optimization of services depending on mobility and on network load, for information routing through various networks, etc.
For further details on CR systems, the interested reader is invited to refer to Arslan (2007), Doyle (2009) and Palicot et al. (2011).
In the context of 5G development, the 5GPPP group, financed by the European Commission, has played a very important role in prestandardization since 2015. In this context, dynamic access to various frequency bands and to various radio access technologies is possible (extended Dynamic Spectrum Access [eDSA], MAC framework). The architecture of this new multitechnology access protocol is under development and relies on LTE-A. The centralized radio resources manager (cRRM), the spectrum manager and the operation and administration and management (OAM) play a fundamental role, which could be related to the cognitive manager that will be introduced further on (5G PPP Architecture Working Group 2017).
10.5.2. CR-VANET
CR-VANET, which stands for Cognitive Radio for Vehicular Ad-hoc Network, or CRAVENET, which stands for Cognitive Radio Assisted Vehicular Network, is an evolution of the ad hoc vehicular network.
This type of network uses the capacities of CR to enable a better management of the radio spectrum, guaranteed connectivity and improvement in the available bandwidth and QoS.
Singh et al. (2014) and Eze et al. (2017) propose an overview of the research works on CR-VANET. It is a very active domain. In Singh et al. (2014), the authors propose a taxonomy of the main problems studied in the literature. In Eze et al. (2017), work in the routing field, MAC layer and security completes the taxonomy. The work related to simulators and to evaluation platforms is also presented.
Figure 10.5 illustrates the main fields of research dealt with.

Figure 10.5. The main problems related to CR in the literature (Singh et al. 2014; Eze et al. 2017)
The following sections enumerate the main publications in the fields indicated in Figure 10.5, namely those on detection of spectrum sensing, identification of the type of system present in the analyzed band, spectrum management, QoS and network-related work.
10.5.2.1. Detection of spectrum sensing
The main theme of spectrum detection, also referred to as “spectral survey”, is to enable the best possible detection of spectrum sensing by primary users, taking into account the vehicular characteristics. There are many such works. Generally speaking, there are several approaches, such as narrow band or wide band, cooperative or non-cooperative approaches and blind or non-blind approaches. When a user is detected in the surveyed band, it is important to detect the type of modulation in order to be able to identify the network to which the detected primary user belongs.
The field of spectral survey and modulation detection has been very active in recent years. Even a standard was proposed, namely the IEEE 802.22 (IEEE 2019) standard. A certain number of publications focused on radio environment detection when the activity of channels strongly varies in time, particularly in the railway sector. Blind spectral survey methods were developed by Hassan et al. (2014), notably in the presence of impulsive noise, and Bouallegue et al. (2018). Various modulation recognition methods were proposed in Hassan et al. (2010, 2012), Kharbech et al. (2013) and Kharbech (2018). This theme is very important, since a mobile environment composed of vehicles leads to frequent variations of spectrum sensing, particularly depending on the environment (highway, country road, etc.).
The cooperative approach relies on the use of a database or clustering, as proposed in Li et al. (2018). The results of the detection made by several vehicles is combined and analyzed in view of the best allocation of frequencies among vehicles. This approach is all the more interesting as the available frequency bands may vary according to the geographical position of the vehicle. Data can be merged in a distributed manner among vehicles or in a centralized manner, passing through an infrastructure, such as the roadside units.
10.5.2.2. Spectrum and QoS management
In this category, research focuses on the methods enabling the best management of the spectrum, while achieving a certain QoS. The proposed methods are centralized, distributed or hybrid.
The centralized method involves the transmission of various spectrum and QoSrelated information to an infrastructure in charge of collecting and analyzing information in order to decide on the vehicle behavior.
The distributed method involves relying on its pairs and on itself for the best spectrum and QoS management. An example dealing with peer-to-peer and therefore distributed distribution is presented in Bradai et al. (2014). Video content is broadcast between vehicles by choosing the best channel available at an instant t, by conducting a dynamic analysis of the quality of channels and relying on a peer-to-peer network for data transmission. Channel selection relies first of all on the best available dedicated short-range communications (DSRC) channel. Otherwise, CR supports the choice of the best channel among available channels that do not belong to DSRC. The selection criterion is the quality of the received signal strength indication (RSSI) connection.
With regard to the hybrid method, which is used in Niyato et al. (2011), this relies on a structure such as road infrastructure and on the vehicles forming an opportunistic network to best manage the spectrum and the QoS. In Niyato et al. (2011), the authors try to reduce the infrastructure load by relying on the cluster leaders for the communication between clusters and with infrastructure in order to make the best decisions.
10.5.2.3. Network
All the classical network themes are applied here to vehicular networks, namely mobility management, routing, content distribution and security management.
In the context of mobility management, handover is taken into account to maintain an active connection and prevent channel interferences. Hence, in Kumar et al. (2017), the authors propose a solution for spectral handover management.
Several methods are proposed for message routing: based on geographical position, without knowledge on geographical position, etc. Hence, in Usha and Ramakrishnan (2019), the authors improve the MPR OLSR algorithm by taking into account inactive channels in order to use them while choosing relay nodes with the highest number of new neighbors.
The work on content distribution focuses on the use of game theory or the peer-to-peer approach. Hence, in Tian et al. (2019), the authors use an evolutionary game approach that assigns licensed channels to secondary users based on price evolving in time and load balancing using this channel. Concerning the use of the peer-to-peer model, the work of Bradai et al. (2014) is worth mentioning, which relies on the notion of a neighborhood to broadcast video fragments and thus enable video content broadcast through the network.
Finally, network security and the protection of user’s private life are very important research subjects. Indeed, road safety messages are essential for the operation of a CR-VANET network to the same extent as in a VANET network (Mitra et al. 2016; Wei et al. 2016). It is therefore important that these messages (accident management, collision management, etc.) reach their destination. In Mitra et al. (2016), the focus is on the detection of black hole attacks in the network and their elimination. These attacks involve the creation of a fictitious virtual node through which all communications enter but do not exit in order to disrupt communications between vehicles. The proposed solution is the detection of these attacks and, once the black hole is identified, an alternative path is set up, bypassing the black hole and enabling communications to resume. In Wei et al. (2016), the authors proposed the use of a light cloud in association with a roadside unit infrastructure (UBR) for securing communications in a CR-VANET. Communications are also secured by using a new service, referred to as “Spectrum Sensing as a Service” (SaaS), enabling a detection of the cooperative spectrum using the implemented cloud.
The following presents research that we intend to conduct in the field of CR for vehicular networks.
10.6. SERENA project: self-adaptive selection of radio access technologies using CR
SERENA is a joint research project conducted by LaBRI (Laboratoire bordelais de recherche en informatique [Bordeaux Laboratory for Computer Science Research]) and IFSTTAR (Institut français des sciences et technologies des transports, de l’aménagement et des réseaux [French Institute of Science and Technology for Transport, Development and Networks]). It also benefits from the support of the SysNum cluster (Numerical systems) of Idex Bordeaux (Initiative d’excellence de l’université de Bordeaux [Initiative of Excellence of the University of Bordeaux]). The general objective of this project, starting at the end of 2019, is the improvement of vehicular communications to enable the deployment of new services, in particular those required for the autonomous vehicle. This involves, in particular, the definition of a self-adaptive selection mechanism of radio access technologies in order to always be best connected.
The proposed self-adaptation mechanism relies on the specification of new decision-making algorithms that are capable of taking into account various constraints, such as QoS, security, energy consumption or user preferences (such as the cost of the communication, for example). The prediction of the probable evolution of the service level will also enable proactive actions in order to provide service continuity in mobility.
The SERENA project enables the optimization and improvement of the quality of data exchanges between vehicles and with the infrastructure. Moreover, because of the retained approach, the evolutions of radio access technologies can be taken charge of due to the use of CR and the virtualization of network functions.
10.6.1. Presentation and positioning
The SERENA project proposes a solution that should enable the connected vehicle to autonomously select in real time the radio access technologies that best meet the needs of each type of communication flow (V2I and/or V2V) and for quite precise use cases. For this purpose, the devised solution relies on the concept of CR and on the introduction of an appropriate cognitive manager located in the embedded terminal. This solution will first be validated by simulations, considering several use cases related to the AV, then at real size, considering software radio maps.
Among the research on the dynamic selection of the best access network for vehicular communications, the work of Singh et al. (2014) and Kumar et al. (2017) deal essentially with V2V communications using CR. Within the ANR PLATA (Plateforme télématique multistandard programmable pour l’automobile [Programmable Telematics On-board Multistandard Radio Platform]) project, the use of embedded software-defined radio (SDR) systems for V2V and V2I communications was considered (Haziza et al. 2013).
In the railway sector, a solution on the middleware-based applicative layer for choosing the best wireless network available for V2I communications depending on various criteria was proposed (Billion et al. 2008). This concept was also proposed in Amanna et al. (2010). In the CORRIDOR (COgnitive Radio for RaIlway through Dynamic and Opportunistic spectrum Reuse) project, works were conducted for the self-adaptation of radio access technology for V2I communication applications for high-speed trains (Berbineau et al. 2014).
To our knowledge, as of today, there are no works in the road sector related to the self-adaptation of radio access technology to the needs of V2X (V2I and V2V) communications using CR intelligence and the virtualization of network functions.
10.6.2. General architecture being considered
The general architecture of the proposed system relies on the use of CR and the virtualization of network functions.
10.6.2.1. Cognition loop and cognitive manager
As previously mentioned, CR is a technology well adapted to the self-adaptation of radio access technology to meet vehicular communication needs.
The objective here is to adapt the operation of the communication module so that it can, on the one hand, select the best access technology/technologies in the presence of constraints and use cases and, on the other hand, consequently adapt its communication parameters. For this purpose, a cognition loop and an appropriate cognitive manager need to be specified.
Specification of the cognition loop
Using the knowledge resulting from the stages of electromagnetic environment analysis, CR makes reconfiguration decisions in a dynamic manner, depending on certain predefined objectives, so that the efficiency of spectrum use is improved with no human intervention (cognition loop).
Within the SERENA project, decision making may lead, for example, to stopping certain low priority flows in order to protect the more critical flows or to a modification of the level of communications security. It is therefore important to specify the cognition loop so that it can display the theme of the SERENA project, as illustrated in Figure 10.6.

Figure 10.6. Example of cognitive loop of the SERENA project
This cognition loop, as already indicated, includes four large stages:
- – collection (observation): in this phase, data useful to decision making are collected. Examples of useful data include speed, position of the vehicle and radio environment (cellular networks present in the environment). Static data such as QoS constraints associated with a type of application are previously stored in the knowledge base;
- – analysis and prediction: an analysis of gathered data is conducted using the knowledge base. Machine learning techniques can be used to predict, for example, the availability time of various frequency bands. An initial filtering can also be done considering only the frequency bands that are expected to meet the communication needs;
- – decision: this stage enables the selection of the radio technology and communication protocols to be used, or the level of security to be applied relying on data resulted from the previous stage. The decision needs to take into account the short term forecast of the availability of connections between two vehicles or the availability of the telecommunications infrastructure in order to guarantee service continuity. Considerations concerning the near future may rely on information on vehicle motion, on the motions of neighboring vehicles or on infrastructure knowledge (information contained in the knowledge base);
- – action: this stage enables a set of actions such as radio reconfiguring (change of frequency band, possible modification of the transmission parameters, etc.) according to the characteristics of the access technology retained during the previous stage, stopping low priority communications to benefit from more bandwidth, increasing the security level, etc.
Cognitive manager specification
A cognitive manager uses various cognitive engines (Ouattara 2014) to set up a cognition loop. These engines are in charge of measurement, analysis, reasoning, learning, decision making and adaptation. The content of each of the various engines required for the set-up of the cognition loop of the SERENA project needs to be specified. It is also important to specify the content of the knowledge base. This contains, on the one hand, static information such as the location of roadside units or the networks present in the area and, on the other hand, calculated or forecast information from the cognitive engines.
10.6.2.2. Network function virtualization
Network function virtualization (NFV) is nowadays a major evolution of networks. In combination with the software-defined networking (SDN) technique, it offers many advantages to network operators, particularly rapid deployment, higher flexibility and better adaptation to context. The introduction of these two technologies is deeply transforming networks and will contribute to accelerating the introduction of the autonomous car (Mendiboure et al. 2019). In particular, 5G relies on SDN/NFV to implement network slicing, which is a logical slicing of the network, to make possible the taking charge of various categories of services such as ITS services with low latency and high availability/reliability. There are still many challenges, such as the orchestration of slices, the management of network functions and the security of SDN networks (Foukas et al. 2017).
The service life of a vehicle is relatively long (several years) in relation to the current evolution of radio technologies. Hence, many new communication technologies may emerge within this period of time. The NFV approach is an important asset for the SERENA project, as it ensures the continued existence of the retained solution in relation to technological evolutions, particularly of new radio access means. Indeed, the virtualization of the vehicle communication module will make it possible to readily add new communication functionalities through the addition of software functions. This approach is all the more facilitated by the fact that radio communications rely within this project on SDR.
10.6.3. The main stakes
The SERENA project raises several challenges, such as the real-time identification and selection of the access technology in a highly changing environment (variation of the speed of the vehicle, connectivity density, number of available access networks, etc.), the capacity to support several simultaneous access technologies for the same communication (to secure the radio link in case of AV, for example), real-time monitoring of the level of service offered and proactive decision making to maintain the required service level.
The main risk incurred is removing excessively low performances that do not meet the needs of strong mobility. Nevertheless, the maximum authorized speed of the autonomous car is at present limited to several dozen kilometers per hour.
The second risk concerns the current difficulties encountered by the integration of CR with the retained access technologies. This risk may be eliminated with the deployment of NFV (OPNFV)2 solutions and the virtualization of access protocols in particular (Riggio et al. 2016).
10.7. Conclusion
AV is being developed and new applications are emerging. These applications have specific communication needs, either in terms of latency, range or bandwidth. For the best operation of these applications, it is important to select the radio access technology that is best adapted to their needs and therefore to study the advantages and drawbacks of the architectures on which these access technologies rely.
The radio spectrum being poorly used, the use of CR makes it possible to find a solution to the needs of communication continuity in the vehicular environment. This chapter illustrated the main contributions of CR to vehicular domain, such as the improvement of network coverage or the improvement in available bandwidth.
In a CR-VANET, CR can bring its own stakes. For example, in Singh et al. (2014), the stakes may relate to the reliability of urgent message communication, the management of dynamic topology, the scarcity of available bands, the management of new communication technologies and the adaptation to various environments (highway, urban area, rural area, etc.) and spectrum distribution.
Within the SERENA project, CR associated with virtualization (NFV) and reconfiguration (SDN) of network functions will enable the vehicle communication module to select the best radio access technology, adapt its radio parameters and be resilient in front of technological evolutions.
The use of AI tools as decision-aiding tools goes hand-in-hand with the development of the AV and machine learning algorithms, in particular, will attract significant enthusiasm in this field.
10.8. References
5G PPP Architecture Working Group (2017). View of 5G architecture (version 2.0) [Online]. Available at: https://5g-ppp.eu/wp-content/uploads/2017/07/5G-PPP-5G-Architecture-White-Paper-2-Summer-2017_For-Public-Consultation.pdf.
Amanna, A., Gadniok, M., Price, M.J., Reed, J.H., Siriwongpairat, W.P., and Himsoon, T.K. (2010). Railway cognitive radio. IEEE Vehicular Technology Magazine, 5(3), 82–89.
Amjad, Z., Sikora, A., Hilt, B., and Lauffenburger, J.-P. (2018). Low latency V2X applications and network requirements performance evaluation. IEEE Intelligent Vehicles Symposium (IV). IEEE, Changsu.
Arslan, H. (2007). Cognitive Radio, Software Defined Radio, and Adaptative Wireless Systems. Springer, Dordrecht.
Berbineau, M, Masson, E, Cocheril, Y, Kalakech, A, Ghys, JP, Dayoub, I, Kharbech, S, Zwingelstein-Colin, M, Simon, E, Haziza, N, Painchault, R, Gautier, R, Hassan, K, De La Rosa, KJ, Radoi, E, Nussbaum, D, Knopp, R, Bonnin, JM, Singh, KD, Lee, JH, Philippe, H, Ghannoum, H, Sanz, D. and Massy, P. (2014). Cognitive radio for high speed railway through dynamic and opportunistic spectrum reuse. Transport Research Arena (TRA) 5th Conference: Transport Solutions from Research to Deployment. 14–17 Apr 2014. TRA, Paris.
Billion, J., Van den Abeele, D., Gransart, C., and Berbineau, M. (2008). ICOM: Toward integrated communications for global railway systems. World Congress on Railway Research. WCRR, Seoul.
Bouallegue, K., Dayoub, I., Gharbi, M., and Hassan, K. (2018). Blind spectrum sensing using extreme eigenvalues for cognitive radio networks. IEEE Communications Letters, 22(7), 1386–1389.
Bradai, A., Ahmed, T., and Benslimane, A. (2014). ViCoV: Efficient video streaming for cognitive radio VANET. Vehicular Communications, 1(3), 105–122.
Campolo, C., Molinaro, A., Iera, A., and Menichella, F. (2017). 5G network slicing for vehicle-to-everything services. IEEE Wireless Communications. 24(6), 38–45.
Cunha, F., Villas, L., Boukerche, A., Maia, G., Viana, A., Mini, R.A., and Loureiro, A.A. (2016). Data communication in VANETs: Survey, applications and challenges. Ad Hoc Networks, 44, 90–103.
Dar, K., Bakhouya, M., Gaber, J., and Wack, M. (2010). Wireless communication technologies for ITS applications. IEEE Communications Magazine, May, 156–162.
Doyle, L. (2009). Essentials of Cognitive Radio. Cambridge University Press, Cambridge.
ETSI (2010). Intelligent Transport Systems (ITS); communications architecture. Document, ETSI, Sophia Antipolis.
ETSI (2014). Vehicular communications; GeoNetworking; Part 4: Geographical addressing and forwarding for point-to-point and point-to-multipoint communications; Sub-part 1: Mediaindependent functionality. Document, ETSI, Sophia Antipolis.
Eze, J., Zhang, S., Liu, E., and Eze, E. (2017). Cognitive radio technology assisted Vehicular AdHoc Networks (VANETs): Current status challenges, and research trends. 23rd International Conference on Automation and Computing. ICAC, Huddersfield.
Foukas, X., Elmokashfi, A., Patounas, G., and Marina, M.K. (2017). Network slicing in 5G: Survey and challenges. IEEE Communications Magazine. IEEE, 55(5), 94–100.
Hassan, K., Dayoub, I., Hamouda, W., and Berbineau, M. (2010). Automatic modulation recognition using wavelet transform and neural networks in wireless system. EURASIP Journal on Advances in Signal Processing. IEEE. Article number: 532898 (2010), 1–13.
Hassan, K., Dayoub, I, Hamouda, W., Nzeza, C.N., and Berbineau, M. (2012). Blind digital modulation identification for spatially-correlated MIMO systems. IEEE Transactions on Wireless Communications, 11, 683–693.
Hassan, K., Gautier, R., Dayoub, I., Berbineau, M., and Radoi, E. (2014). Multiple-antenna-based blind spectrum sensing in the presence of impulsive noise. IEEE Transactions on Vehicular Technology, 63(5), 2248–2257.
Haziza, N., Kassab, M., Knopp, R., Harri, J. and Kaltenberger, F. et al. (2013). Multi-technology vehicular cooperative system based on software defined radio (SDR). Fifth Workshop on Communication Technologies for Vehicles. Nets4cars, Vilnius.
Hubaux, J.-P. (2005). Vehicular networks: How to secure them. MiNEMA Summer School. MiNEMA, Klagenfurt.
IEEE (2010). 802.11p. Local and metropolitan area networks – Specific requirements – Part 11: Wireless LAN medium access control (MAC) and physical layer (PHY) specifications amendment 6: Wireless access in vehicular environments. Document, IEEE.
IEEE (2019). IEEE 802.22. Draft standard for information technology – Local and metropolitan area networks – Specific requirements – Part 22: Cognitive radio wireless regional area networks (WRAN) medium access control (MAC) and physical layer (PHY) specifications: Policies and procedures for operation in the bands that allow spectrum sharing where the communications devices may opportunistically operate in the spectrum of the primary service. Document, IEEE.
Kharbech, S., Dayoub, I., Simon, E., and Zwingelstein-Colin, M. (2013). Blind digital modulation detector for MIMO systems over high-speed railway channels. Communication Technologies for Vehicles, 232–241.
Kharbech, S., Dayoub, I., Zwingelstein-Colin, M., and Simon, E.P. (2018). Blind digital modulation identification for MIMO systems in railway environments with high-speed channels and impulsive noise. IEEE Transactions on Vehicular Technology, 67(8), 7370–7379.
Kumar, K., Prakash, A., and Tripathi, R. (2017). A spectrum handoff scheme for optimal network selection in NEMO based cognitive radio vehicular networks. Wireless Communications and Mobile Computing, 2017.
Li, X., Song, T., Zhang, Y., Chen, G., and Hu, J. (2018). A hybrid cooperative spectrum sensing scheme based on spatial-temporal correlation for CR-VANET. IEEE 87th Vehicular Technology Conference (VTC Spring). IEEE, Porto.
MacHardy, Z., Khan, A., Obana, K., and Iwashina, S. (2018). V2X access technologies: Regulation, research, and remaining challenges. IEEE Communications Surveys & Tutorials, 20(3), 1858–1877.
Mannoni, V., Berg, V., Sesia, S., and Perraud, E. (2019). A comparison of the V2X communication systems: ITS-G5 and C-V2X. IEEE Vehicular Technology Conference (VTC Spring). IEEE, Kuala-Lumpur.
Mendiboure, L., Chalouf, M.A., and Krief, F. (2019). Edge computing based applications in vehicular environments: Comparative study and main issues. Journal of Computer Science and Technology, 34(4), 869–886.
Mir, Z.H. and Filali, F. (2018). Applications, requirements, and design guidelines for multitiered vehicular network architecture. 10th Wireless Days Conference. IEEE, Dubai.
Mitola, J. and Maguire, G.Q. (1999). Cognitive radio: Making software radios more personal. IEEE Personal Communications, 6(4), 13–18.
Mitra, S., Jana, B. and Poray, J. (2016). A novel scheme to detect and remove black hole attack in cognitive radio vehicular ad-hoc networks (CR-VANETs). International Conference on Computer, Electrical & Communication Engineering. ICCECE, Kolkata.
Niyato, D., Hossain, E., and Wang, P. (2011). Optimal channel access management with QoS support for cognitive vehicular networks. IEEE Transactions on Mobile Computing, 10(4), 573–591.
Ouattara, D. (2014). Apport des réseaux intelligents aux usages et pratiques en e-santé: Une architecture flexible basée sur la technologie radio cognitive pour un suivi efficace et temps réel des patients. PhD Thesis, University of Bordeaux, Bordeaux.
Palicot, J. (2011). Radio Engineering: From Software Radio to Cognitive Radio. ISTE Ltd, London and John Wiley & Sons, New York.
Riggio, R., Bradai, A., Harutyunyan, D., Rasheed, T., and Ahmed, T. (2016). Scheduling wireless virtual networks functions. IEEE Transactions on Network and Service Management. IEEE publisher, 13(2), 240–252.
Shladover, S.E., Lappin, J., Denaro, R.P., and Smith, B.W. (2014). Introduction: The Transportation Research Board’s 2013 Workshop on Road Vehicle Automation. In Road Vehicle Automation, Meyer, G. and Beiker, S. (eds). Springer, Cham.
Singh, K.D., Rawat, P., and Bonnin, J.-M. (2014). Cognitive radio for vehicular ad hoc networks (CR-VANETs): Approaches and challenges. EURASIP Journal on Wireless Communications and Networking. Springer, 2014(1), 1–22.
Tian, D., Zhou, J., Wang, Y., Sheng, Z., Duan, X., and Leung, V.C.M. (2019). Channel access optimization with adaptive congestion pricing for cognitive vehicular networks: An evolutionary game approach. IEEE Transactions on Mobile Computing. IEEE publisher, 19(4), 803–820.
Usha, M. and Ramakrishnan, B. (2019). An enhanced MPR OLSR protocol for efficient node selection process in cognitive radio based VANET. Wireless Personal Communications. Springer, 106(2), 763–787.
Wei, Z., Yu, F.R., Tang, H., Liang, C., and Yan, Q. (2016). Securing cognitive radio vehicular Ad hoc networks with trusted lightweight cloud computing. IEEE Conference on Communication and Network Security. IEEE, Philadelphia.
- 1 Available at : https://www.ifsttar.fr/ressources-en-ligne/espace-science-et-societe/mobilites/dossiers-thematiques/vehicule-autonome/.
- 2 Open Platform for Network Function Virtualization, available at: https://www.opnfv.org/.