
Device architectures
2.1 Introduction
OpenCL has been developed by a wide range of industry groups to satisfy the need to standardize programming models that can achieve high performance across the range of devices available on the market. Each of these companies has specific goals in mind for OpenCL and targets for what features OpenCL should have to be able to run correctly on a specific architecture. To this end, OpenCL has a range of features that attempt to allow detection of unique hardware capabilities (e.g. the clGetDeviceInfo application programming interface (API) call).
Although OpenCL is designed to be a platform-independent API, at the algorithm level and consequently at the level of kernel implementation, true platform independence in terms of performance is still a goal (versus a reality). While version 2.0 of the OpenCL standard has made some large strides in this area, as developers we still need to understand the potential advantages of different hardware features, the key runtime characteristics of these devices, and where these devices fit into the different classes of computer architectures. Once the reader is equipped with this deeper understanding of the targeted hardware, he or she can make informed choices when designing parallel algorithms and software. This understanding should also provide the reader with insight into the philosophy behind OpenCL’s design in terms of programming, memory, and runtime models.
OpenCL’s parallelism model is intended to run efficiently on serial, symmetric multiprocessing, multithreaded, and single instruction, multiple data (SIMD) or vector devices. In this chapter, we discuss some of these devices and the overall design space in which they sit.
2.2 Hardware Trade-offs
Given the history of OpenCL and its early use for graphics APIs and pixel shaders, it is easy to understand how OpenCL has developed as a leading language targeted for graphics processing unit (GPU) programming. As a result, OpenCL has become a popular programming API for the high-performance computing market. However, as the number of platforms supporting OpenCL grows (particularly in the embedded systems space), the overall impact of OpenCL should increase substantially.
What is not necessarily clear from this discussion is what a GPU really is and how it differs from these “other devices.” When we develop general-purpose code for a GPU, is the device still a graphics processor, or is it a more generic entity? If it is a graphics processor, is that due to the device carrying some amount of graphics-specific logic, or is it the architectural style overall?
More questions arise when we try to think about this question in any detail. How many cores does a GPU have? To answer that question, we have to decide on a definition for “core.” What is a “many-core” device, and is it significantly different from a “multicore” device? In general, different architectures choose different approaches to increase performance for a given power/transistor budget. Rather than there simply being a raw compute power/electrical power/area trade-off, hardware developers have always also had to consider programming effort. The trade-off between these factors has created a wide divergence in designs.
Multicore central processing units (CPUs) allow us to maintain clock frequencies and hardware complexity that are comparable to those of single-core CPUs, while adding more cores as transistor sizes reduce. With careful design, power consumption can be kept within reasonable limits. SIMD and very long instruction word (VLIW) architectures attempt to further increase the amount of useful work being performed by improving the ratio of arithmetic operations to control logic. In such cases, it can be difficult to generate workloads to keep the arithmetic logic units (ALUs) satisfied. Multithreading approaches this from a different angle. Rather than increasing the ratio of computation to control logic, it increases the amount of useful work available to occupy computation logic during periods in which indirectly useful work is occupying noncompute logic such as memory pipelines. Thereby multithreading increases the utilization of the device we already have. Threading can be seen from the software side, in which case it can apply to multicore chips as much as to single-core designs, but it can also be viewed in terms of single cores managing multiple software threads. Caches and memory system trade-offs allow different architectures to target different data access patterns while trading off transistors for different uses.
In all these cases, we can apply the trade-offs to an individual core or a set of cores, depending on our definition of a core. However, we do not need to apply the same trade-off across an entire device. Heterogeneity can enable hardware optimizations for multiple types of algorithms running simultaneously, offering better performance on both and hence overall. The traditional, and at the present time common, example of this at the system level is the GPU plus CPU combination we see in modern PCs (along with other lower-performance processors scattered throughout the system). The latest generations of high-performance processors combine these two aspects into a single device, which AMD calls the accelerated processing unit (APU) [1].
In reality, we see combinations of these factors in different designs with different target markets, applications, and price points. In this section, we examine some of these architectural features and discuss to what degree various common architectures apply them.
2.2.1 Performance Increase with Frequency, and its Limitations
The easiest way, as a developer, to think about code we are writing is to create software that executes linearly: perform one task, complete that task, perform another task. It is considerably more difficult for a developer to write parallel code; this is true even for limited SIMD or vector parallelism as is common in graphics. Multicomponent pixels make this relatively simple as the logical entity maps well to the programming concept. In other applications, where the logical concepts do not map as effectively to programming vectors, extracting SIMD operations can be substantially more difficult. For this reason, architectures have historically aimed to increase the performance of a single, narrow, thread of execution before moving to parallelism, with extreme, multithreaded parallelism relegated to high-performance specialist machines in particular markets.
Shrinking of complementary metal-oxide semiconductor (CMOS) circuitry has allowed distances between transistors to scale fairly consistently for an extended period of time. The shrinking of distances and reduction in size of the capacitors allowed hardware architects to clock circuits at a higher rate. In turn, this led to Gordon Moore’s famous self-fulfilling prophecy about transistor density and its misinterpretations in the realm of execution frequency and overall performance. Certainly, increasing the frequency allowed the performance of nonparallel code to increase consistently during that time, such that it became an expectation for software developers until the early twenty-first century.
During the past decade, it has become obvious that continued scaling of clock frequencies of CPUs is not practical, largely due to power and heat dissipation constraints. The reason for this is that power consumption is dependent on frequency in a nonlinear manner. CMOS dynamic power consumption is approximated by the combination of dynamic and static power:
where A is the activity factor, or fraction of the number of transistors in the circuit that are switching, C is the capacitance of the circuit, V is the voltage applied across the circuit, F is the switching frequency, and Ileak is an estimate of the current due to leakage of transistors.
It appears from this equation that power is linear with frequency. In reality, to increase the frequency, one has to increase the rate of flow of charge into and out of the capacitors in the circuit. This requires a comparable increase in voltage, which both scales the dynamic term and increases the latter, static, term in the equation. For a long time, voltages could reduce with each process generation such that frequency scaling would not increase the power consumption uncontrollably. However, as process technology has reached the small sizes we see today, we can no longer scale the voltage down without increasing the error rate of transistor switching, and hence frequency scaling requires voltage increases. The increase in power consumption and heat dissipation from any increase in frequency is then substantial.
As a second problem, increasing the clock frequency on-chip requires either an increase of off-chip memory bandwidth to provide data fast enough to not stall the workload running through the processor or an increase of the amount of caching in the system.
If we are unable to continue increasing the frequency with the goal of obtaining higher performance, we require other solutions. The heart of any of these solutions is to increase the number of operations performed in a given clock cycle.
2.2.2 Superscalar Execution
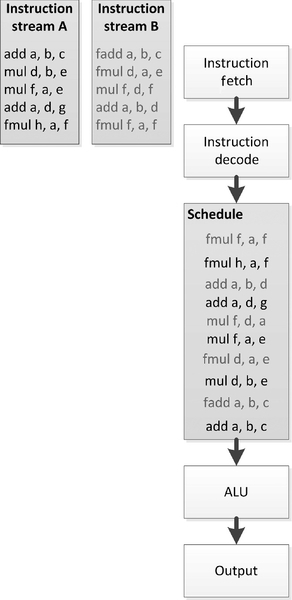
Superscalar and, by extension, out-of-order execution is one solution that has been included on CPUs for a long time; it has been included on x86 designs since the beginning of the Pentium era. In these designs, the CPU maintains dependence information between instructions in the instruction stream and schedules work onto unused functional units when possible. An example of this is shown in Figure 2.1.
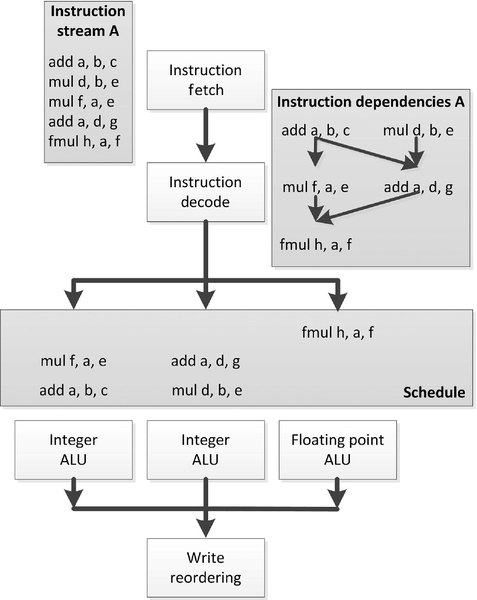
The major beneficiary of out-of-order logic is the software developer. By extracting parallelism from the programmer’s code automatically within the hardware, serial code performs faster without any extra developer effort. Indeed, superscalar designs predate frequency scaling limitations by a decade or more, even in popular mass-produced devices, as a way to increase overall performance superlinearly. However, these designs are not without their disadvantages.
Out-of-order scheduling logic requires a substantial investment in transistors and hence CPU die area to maintain queues of in-flight instructions and maintain information on interinstruction dependencies to deal with dynamic schedules throughout the device. In addition, speculative instruction execution quickly becomes necessary to expand the window of out-of-order instructions to execute in parallel. Such speculative execution results in throwaway work and hence wasted energy. As a result, out-of-order execution in a CPU has shown diminishing returns; the industry has taken other approaches to increase performance as transistor size has decreased, even on the high-performance devices in which superscalar logic was formerly feasible. On embedded and special-purpose devices, extraction of parallelism from serial code has never been as much of a goal, and such designs have historically been less common in these areas.
Good examples of superscalar processors are numerous, from Seymour Cray’s CDC 6600 to numerous RISC designs in the 1990s. Currently, high-end CPUs are mostly superscalar. Many GPUs also have superscalar capabilities.
2.2.3 Very Long Instruction Word
VLIW execution is a heavily compiler-dependent method for increasing instruction-level parallelism in a processor. Rather than depending entirely on complex out-of-order control logic that maintains dependencies in hardware, as we saw when discussing superscalar execution, VLIW execution moves this dependence analysis work into the compiler. Instead of a scalar instruction stream being provided, each issued instruction in a VLIW processor is a long instruction word comprising multiple instructions intended to be issued in parallel. This instruction will be mapped directly to the execution pipelines of the processor.
An example of VLIW execution is shown in Figure 2.2. This is the same set of instructions as we saw in Figure 2.1, but rather than being fetched serially, they are fetched in three horizontally arranged packets of up to three instructions. We now see that the dependence structure of this instruction stream is linear, and the hardware will treat it that way rather than extracting and tracking a more complicated dependence graph. The VLIW instruction packets are decoded, and each individual part of the instruction stream maps to a given computation unit in the processor for execution. In some VLIW designs, as in this example, the computation units are heterogeneous, and hence some instructions will only ever be scheduled into a given lane of the VLIW packet stream. Other architectures present more homogeneous hardware such that any instruction can be issued in any location, and only dependence information limits the possibilities.
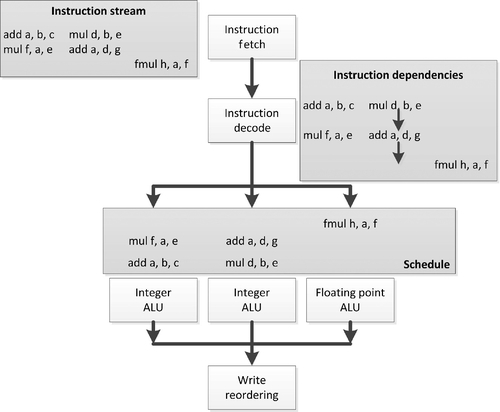
In the example in Figure 2.2, we see that the instruction schedule has gaps: the first two VLIW packets are missing a third entry, and the third VLIW packet is missing its first and second entries. Obviously, the example is very simple, with few instructions to pack, but it is a common problem with VLIW architectures that efficiency can be lost owing to the compiler’s inability to fully fill packets. This may be due to limitations in the compiler or may be due simply to an inherent lack of parallelism in the instruction stream. In the latter case, the situation will be no worse than for out-of-order execution but will be more efficient as the scheduling hardware is reduced in complexity. The former case would end up as a trade-off between efficiency losses from unfilled execution slots and gains from reduced hardware control overhead. In addition, there is an extra cost in compiler development to take into account when performing a cost-benefit analysis for VLIW execution over hardware schedule superscalar execution.
VLIW designs commonly appear in digital signal processor chips. High-end consumer devices currently include the Intel Itanium line of CPUs (known as explicitly parallel instruction computing, EPIC) and AMD’s HD6000 series GPUs.
2.2.4 SIMD and Vector Processing
SIMD and its generalization in vector parallelism aim for improved efficiency from a slightly different angle compared with the previously discussed concepts. Whereas VLIW and hardware-managed superscalar execution both address extraction of independent instruction parallelism from unrelated instructions in an instruction stream, SIMD and vector parallelism directly allow the hardware instructions to target data-parallel execution.
A single SIMD instruction encapsulates a request that the same operation be performed on multiple data elements in parallel. Contrast this with the scalar operation performed by each instruction in the other approaches to parallelism. Vector computation generalizes this approach and usually works over long sequences of data elements, often pipelining computations over the data rather than executing on all elements simultaneously, and more generally supports gathered read and scattered write operations to and from memory.
If we again look at a variation on the running example as seen in Figure 2.3, we can see that the instruction stream is now issued linearly rather than out of order. However, each of these instructions now executes over a vector of four ALUs at the same time. The integer instructions issue one by one through the four-way integer vector ALU on the left, and the floating-point instructions issue similarly through the four-way floating-point ALU on the right. Note that although in this example we are issuing the instructions linearly, there is no reason to assume that we cannot perform these operations within a superscalar or VLIW pipeline, and we will see architectures that do just that in our later discussion.
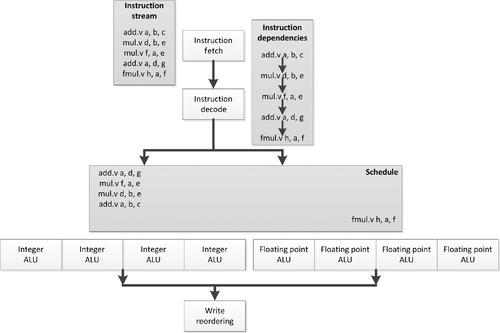
The advantage of SIMD execution is that relative to ALU work, the amount of scheduling and the amount of instruction decode logic can both be decreased. We are now performing four operations with a single instruction and a single point in the dependence schedule.
Of course, as with the previous proposals, there are trade-offs. A significant amount of code is not data parallel, and hence it is not possible to find vector instructions to issue. In other cases, it is simply too difficult for the compiler to extract data parallelism from code. For example, vectorization of loops is an ongoing challenge, with little success in anything but the simplest cases. In these cases, we end up with unutilized ALUs, and thus transistor wastage.
Vector processors originated in the supercomputer market, but SIMD designs are common in many market segments. CPUs often include SIMD pipelines with explicit SIMD instructions in a scalar instruction stream, including the various forms of Streaming SIMD Extensions (SSE) and Advanced Vector Extensions (AVX) on x86 chips, the AltiVec extensions for PowerPC, and ARM’s NEON extensions. GPU architectures historically included explicit SIMD operations to support pixel vectors, and many modern GPUs also execute over wide implicit SIMD vectors, where the scalar instruction stream describes a single lane. Indeed, such machines can be considered vector machines because in many cases the vector is logical. For example, AMD’s Radeon R9 290X architecture executes 64-wide SIMD operations. These wide vector instructions are pipelined over multiple cycles through a 16-lane SIMD unit.
2.2.5 Hardware Multithreading
The third common form of parallelism, after instruction parallelism and data parallelism, is thread parallelism, or in other words, the execution of multiple independent instruction streams. Clearly, this form is heavily used on large, parallel machines, but it is also useful within a single CPU core. As previously discussed, extracting independent instructions from an instruction stream is difficult, in terms of both hardware and compiler work, and it is sometimes impossible. Extracting instruction parallelism from two independent threads is trivial because those threads already guarantee independence outside explicit synchronization blocks. The challenge of implementing hardware multithreading lies in managing the additional instruction stream and the state that a second instruction stream requires in terms of registers and cache.
There are two main ways to apply on-chip multithreading:
1. Simultaneous multithreading (SMT)
2. Temporal multithreading
SMT is visualized in Figure 2.4. In this approach, instructions from multiple threads are interleaved on the execution resources by an extension to the superscalar scheduling logic that tracks both instruction dependencies and source threads. The goal is for the execution resources to be more effectively utilized, and in Figure 2.4 that is the case. A higher proportion of execution slots are occupied with useful work. The cost of this approach is that state storage must be increased, and the instruction dependence and scheduling logic become more complicated as they now manage two distinct sets of dependencies, resources, and execution queues.
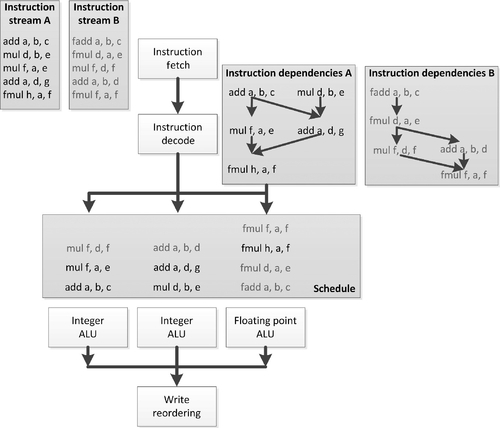
Figure 2.5 shows the simpler time-sliced version of chip multithreading. In this case, each thread is executed in consecutive execution slots in round-robin fashion. For the purposes of simplification, the diagram shows a single shared ALU.
The following are advantages of this approach:
• The logic to handle the scheduling is simple.
• Pipeline latency can be covered by scheduling more threads, reducing the amount of forwarding logic.
• Stalls of a single thread due to a cache miss, waiting for a branch to be computed, or similar events can be covered by changing the order of thread execution and running more threads than necessary to cover pipeline latency.
This last case is the most useful in scaling to complicated problems. Many architectures are able to run more threads than necessary. When a thread reaches some sort of stall, it can be removed from the ready queue such that only threads in the ready queue are scheduled for execution. Once the stall ends, the thread can be placed back in the ready queue. In this manner, although a single thread might execute more slowly than on an out-of-order machine, the total throughput of the machine is kept high, and utilization of compute resources can be maintained without overcomplicating the control logic. Taken to an extreme, this sort of heavy multithreading can be viewed as throughput computing: maximizing throughput at the possible expense of latency. The principle is shown in Figure 2.6.

Both forms of chip multithreading are common. The MTA design from Tera is a classic time-sliced multithreading supercomputer. The MTA design suffered from manufacturing difficulties; however, Cray’s subsequent implementation, the MTA-2 design, utilized 128 register sets per CPU using fast thread switching between threads within this state and skipping stalled threads. The XMT design extends this further to fit multithreaded processors in standard AMD Opteron-based Cray systems. Sun’s Niagara series of chips implements a multicore multithreaded design (eight per core) to achieve low power and high throughput on data-center workloads. Intel’s Pentium 4 and then later Nehalem and successor designs implement a form of SMT known as hyperthreading. Modern GPU designs run numerous threads in a temporal fashion on each core, where the number is generally resource limited: on the current generation of AMD GPUs, this is usually 8–16 threads per core to cover latency and stalls.
2.2.6 Multicore Architectures
Conceptually at least, the obvious approach to increasing the amount of work performed per clock cycle is simply to clone a single CPU core multiple times on the chip. In the simplest case, each of these cores executes largely independently, sharing data through the memory system, usually through a cache coherency protocol. This design is a scaled-down version of traditional multisocket server symmetric multiprocessing systems that have been used to increase performance for decades, in some cases to extreme degrees.
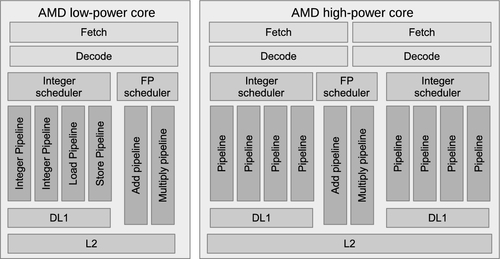
However, multicore systems come in different guises, and it can be very difficult to define a core. For example, a mainstream CPU, at the high end, generally includes a wide range of functional blocks such that it is independent of other cores on the chip, barring interfacing logic, memory controllers, and so on, that would be unlikely to count as cores. However the line can be blurred. For example, AMD’s Steamroller (high-power core) design, shown alongside the simpler Puma (low-power core) design in Figure 2.7, shares functional units between pairs of cores in a replicable unit termed a module. A single thread will run on each core in a traditional fashion while the hardware interleaves floating-point instructions onto the shared floating-point pipelines. The aim of such a design is to raise efficiency by improving occupancy of functional units.
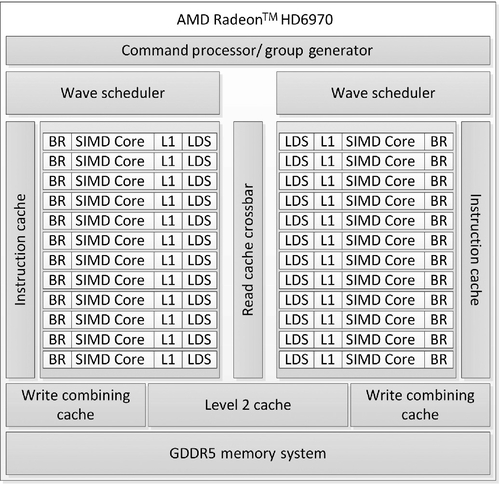
In a similar manner, GPU designs have a different definition for “core.” Modern GPUs have tens of cores—at the current high end there are between 32 and 64, with levels of complexity that depend on the specific architecture. Many GPU designs, such as the Graphics Core Next-based [2] designs from AMD and the Fermi and Kepler derivatives from NVIDIA [3], follow a relatively CPU-like design. However, some designs diverge substantially. For example, if we look at the AMD Radeon HD 6970 high-level diagram in Figure 2.8, we see a similar approach to Bulldozer taken to an extreme. Although the device has 24 SIMD cores, by looking at the execution units in the fairest way to compare them with traditional CPUs, we see those SIMD cores execute only ALU operations—both floating point and integer. Instruction scheduling, decode, and dispatch are executed by the wave scheduler units. The wave schedulers are so named because the unit of scheduling is a wide SIMD thread context known as a wavefront. Indeed, on the AMD Radeon HD 6970, there are two wave schedulers to prevent overly high complexity, whereas lower-capability parts in the series use only one wave scheduler and scale the number of SIMD cores.
2.2.7 Integration: Systems-on-Chip and the APU
In the embedded space, a more heterogeneous approach to multicore design is common. To achieve low power, embedded developers have constructed complicated systems-on-chip (SoCs) combining various components into a compact and cost-effective design. Combining specialized components in this way allows devices to be optimized for a particular use case and power envelope, which is particularly important in markets such as the design of cell phones.
Benefits from SoCs include the following:
• Combining multiple elements into a single device allows there to be a single manufacturing process and a single product to deal with, allowing lower manufacturing costs.
• The smaller number of packages takes up less space in a final device, allowing lower device cost and a smaller form factor, which are vital in markets such as mobile telephony.
• Smaller distances mean less power is used during communication and easier sharing of data through a single memory system.
• Lower communication latencies can lead to improved turnaround times for workloads dispatched to coprocessors.
Good examples of this approach in the cell phone space are the Snapdragon SoC from Qualcomm and the OMAP series from Texas Instruments. Designs such as these combine an implementation of the ARM instruction set architecture (ISA), a mobile GPU, memory controllers, and various wireless and media processing components. At the higher-performance end of the market, Sony, Toshiba, and IBM developed the Cell Broadband Engine processor, which combines a number of small, high-performance but simple cores with a main traditional full-capability core with the aim of improving the performance-per-watt characteristics. AMD and Intel have both developed combined CPU-GPU SoCs termed APUs by AMD, enabling high-performance graphics and CPU power in a more efficient single-chip package.
2.2.8 Cache Hierarchies and Memory Systems
Whereas in the early years of supercomputers memory bandwidth and latency were such that CPUs could always access the data they needed when it was needed, it has been a long time since this has been the case. Currently, it is not unusual that the latency between a memory request on the CPU and the data being returned from memory is hundreds or even thousands of CPU cycles. On a single-threaded CPU, out-of-order logic would be impossibly complicated to cover that much latency.
Fortunately, most applications do not make entirely independent memory accesses. In general, memory access patterns express some degree of locality, which will be either of the following:
• Spatial: two or more memory accesses read or write addresses that are near each other, by some measure, in memory.
• Temporal: two or more memory accesses read or write the same address within a relatively small time window.
These two forms of locality lead to the conclusion that if we can store a value read from memory and its neighbors, later reads will be able to reuse that data. As a result, CPU designers have added complicated layers of intermediate memory caches to support this optimization.
Caches come in various designs, but they can be divided into two general categories that are applied depending on the workload. CPU caches tend to be designed to minimize latency. To achieve this, caches are large with complicated hierarchies to move as much of the data as close to the CPU core as possible. Out-of-order logic can cover only a limited amount of latency, so the fewer cycles to access data, the better. In addition, keeping data close to the execution units minimizes power consumption: long-distance data movement is a significant component of CPU power usage.
Throughput processors are more latency tolerant, using threading to cover the cycles between request and data return. In these designs, the goal of caching is less to minimize latency, so the large multilevel hierarchy is less common, and more to reduce traffic across the limited memory buses. Smaller caches that allow neighboring accesses to be caught but are concerned less with very long periods of reuse are often seen in these situations, acting more as spatial filters. Wide SIMD units and programming models aim for efficient coalesced memory access to increase the size of memory transaction issues. The result is that dedicating logic to arithmetic units becomes a better use of transistors. In addition, higher-latency, higher-bandwidth memory interconnects allow this design to work more efficiently. One extension of this bias toward spatial locality that we often see in GPU design is to lay memory out such that two-dimensional accesses are efficiently cached.
Some designs including GPUs and the Cell processor include software-managed scratchpad memory spaces as well as or in place of cache hierarchies. These buffers enable higher performance at a given power and area budget, but they require more complicated programming.
The reality of any given design is that it balances caching levels and features on the basis of the expected workloads for the processor. Unfortunately, there is no right answer for all processor design-workload combinations.
2.3 The Architectural Design Space
In the real world, we do not see many architectures that fit cleanly into just one of the previously mentioned categories. The reality is that computer architecture is a huge design space with enormous variation in all directions. Common current architectures sit in that design space at various points.
This is most important in helping us realize that some of the publicly held viewpoints of today’s architectures can be overly simplistic. For example, in the domain of GPUs, we often encounter statements such as the following:
• CPUs are serial, GPUs are parallel.
• CPUs have a small number of cores, GPUs have hundreds.
• GPUs run thousands of threads, CPUs run one (or two).
The reality of any design is far more complicated than that, with wide variation in internal buffers, the number of pipelines, the type of pipelines, and so on. The theme of this chapter is to show that the difference between GPUs and CPUs, or indeed most modern architectures, is not fundamental. Most of the visible architectural differences we commonly see today are simply points on a sliding scale, a set of parameterization knobs applied to basic designs. These are the differences the average programmer needs to understand: only the expert need be concerned with ratios between buffer sizes and arranging instructions for hardware co-issue.
In this section, we discuss several real architectures and where they fit in the design space, trading off some of the features we discussed previously. It is hoped that this will help to give a more nuanced feel for architectural trade-offs and help to develop views on what algorithms may or may not work well on real architectures. The goal is to show that the wide SIMD and state storage design of GPUs is a long way along a spectrum from simple CPUs in terms of use of area, and that maximum performance and ease of achieving good performance depend on these design choices.
2.3.1 CPU Designs
The devices that most people are used to developing on can be loosely described as “CPUs.” Even within this space, there is considerable variation in how different forms of parallelism are utilized.
Low-power CPUs
At the very lowest end of the power spectrum, CPU cores are very simple, in-order cores. At this level, power consumption is the most important factor in design, with performance a secondary consideration. Such designs often do not support floating-point operations and have no need for parallelism.
Currently, the most widespread low-power CPU ISA is the ARM ISA developed in intellectual property (IP) form by ARM Holdings. The ARM architecture originated in the Acorn RISC machine concept from Acorn Computers as a desktop architecture, but recently the simplicity of the architecture has made it dominant in the mobile and embedded markets, with a foray into Acorn’s own desktop projects from 1996 to 1998 as the DEC-manufactured StrongARM. ARM designs come in a wide variety of forms because the ISA IP is licensed to manufacturers who are at liberty to design their own cores. Usually, ARM cores are combined within SoCs with other units such as cellular modems, embedded graphics processors, video accelerators, and similar devices.
Most variants on the ARM ISA have been in-order cores with three to seven pipeline stages. The Cortex-A8, Cortex-A9, and Cortex-A15 cores, based on the ARMv7 ISA, are superscalar and multicore with up to four symmetric cores. The ARMv7-based cores optionally support the NEON SIMD instructions, giving 64- and 128-bit SIMD operations in each core.
ARMv8-A cores add a 64-bit instruction set, and updated NEON extensions with more 128-bit registers, double-precision support, and cryptography instructions. The high-end Cortex-A57, based on the ARMv8-A architecture, targets mid-range performance, has eight-wide instruction issue, and trading performance for power, an out-of-order pipeline. The smaller Cortex-A53 retains the in-order pipeline, although it supports dual instruction issue.
The Puma microarchitecture (shown in Figure 2.7) is the low-power core in AMD’s current CPU lineup, designed for a power range of 2–25 W. To achieve the low-power figures, Puma cores are clocked more slowly than the high-end parts, and are carefully designed to reduce overhead in the data-path—at the cost of lower peak performance. Puma is a 64-bit design, supports two-way out-of-order issue, and also has two 128-bit SIMD units that can combine to execute AVX operations.
Intel’s Atom designs have historically taken a slightly different approach to performance compared with AMD’s Puma. Before the Silvermont microarchitecture, Atom did not support out-of-order execution, and used SMT to make up for lack of single-thread performance. Starting with Silvermont, the designs from Intel and AMD use similar techniques for trading off power and performance.
In general, low-power CPUs can be characterized by in-order or narrow out-of-order execution with relatively narrow SIMD units. Variation in the number of cores can be used for scaling to various power-performance points in multithreaded situations. In all cases, features are kept simple and frequencies are kept low compared with those in desktop CPUs as a method for reducing power consumption.
Mainstream desktop CPUs
Mainstream desktop CPUs from AMD and Intel do not look much different from the Puma design. In each case, they slightly increase the complexity of each element.
The Haswell microarchitecture is the current mainstream desktop CPU core from Intel. Previous generations, such as Sandy Bridge [4] and Ivy Bridge (Sandy Bridge die shrink), supported 128-bit SSE operations and 256-bit AVX operations. Haswell [5] added support for AVX2—an update to AVX providing support for a greater number of integer instructions. The Haswell pipeline issues up to eight operations of mixed types in parallel, with the possible mix of operations determined by the functional units connected to its eight scheduling “ports.” The out-of-order engine can handle up to 192 operations in flight at a time.
Intel added hardware multithreading support to Nehalem, Sandy Bridge’s predecessor, and maintained this in Sandy Bridge and Haswell. In this case, it is true SMT: each core can mix operations from a pair of threads in the execution units. This increase in scheduling complexity is traded against the increased utilization of the functional units.
AMD’s Steamroller core, seen in Figure 2.7, increases parallel thread execution by taking a middle ground between increasing core count and increasing the number of threads per core. The approach used in Steamroller is to create a second independent integer core with its own set of private ALUs, state and scheduler. However, the fetch unit, floating-point ALUs, and the level 2 (L2) cache are shared between pairs of cores. AMD refers to this shared, two-core design as a “module.” The goal of the module is to share only functional units that are not likely to be heavily contended in real workloads. In the previous Bulldozer and Piledriver microarchitectures, the decode unit was also shared between cores in a module. However, in Steamroller, decode has been replicated in both cores.
Each core supports out-of-order execution through four ALU pipelines. The shared floating-point ALU is a pair of 128-bit (SSE) SIMD units that can combine to execute AVX instructions. To provide power savings within mobile devices, the Steamroller microarchitecture also introduced a dynamically resizable L2 cache—portions of which can be powered down depending on the workload characteristics.
With mainstream CPUs, then, we see wide multi-issue, out-of-order hardware, high clock speeds, and large caches—all features intended to maintain high single-threaded performance with reasonably high power draw. In-core multithreading is kept minimal or is nonexistent, and SIMD units are set at a width that does not waste too much area when they are not in use.
Server CPUs
Intel’s Itanium architecture and its more successful successors (the latest being the Itanium 9500), represent an interesting attempt to make a mainstream server processor based on VLIW techniques [6]. The Itanium architecture includes a large number of registers (128 integer and 128 floating point registers). It uses a VLIW approach known as EPIC, in which instructions are stored in 128-bit, three-instruction bundles. The CPU fetches four instruction bundles per cycle from its L1 cache and can hence executes 12 instructions per clock cycle. The processor is designed to be efficiently combined into multicore and multisocket servers.
The goal of EPIC is to move the problem of exploiting parallelism from runtime to compile time. It does this by feeding back information from execution traces into the compiler. It is the task of the compiler to package instructions into the VLIW/EPIC packets, and as a result, performance on the architecture is highly dependent on compiler capability. To assist with this, numerous execution masks, dependence flags between bundles, prefetch instructions, speculative loads, and rotating register files are built into the architecture. To improve the throughput of the processor, the latest Itanium microarchitectures have included SMT, with the Itanium 9500 supporting independent front-end and back-end pipeline execution.
The SPARC T-series family (Figure 2.9), originally from Sun and under continuing development at Oracle, takes a throughput computing multithreaded approach to server workloads [7]. Workloads on many servers, particularly transactional and Web workloads, are often heavily multithreaded, with a large number of lightweight integer threads using the memory system. The UltraSPARC Tx and later SPARC Tx CPUs are designed to efficiently execute a large number of threads to maximize overall work throughput with minimal power consumption. Each of the cores is designed to be simple and efficient, with no out-of-order execution logic, until the SPARC T4. Within a core, the focus on thread-level parallelism is immediately apparent, as it can interleave operations from eight threads with only a dual issue pipeline. This design shows a clear preference for latency hiding and simplicity of logic compared with the mainstream x86 designs. The simpler design of the SPARC cores allows up to 16 cores per processor in the SPARC T5.
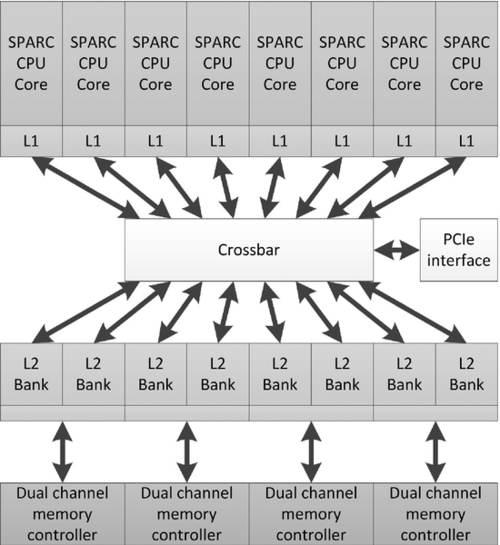
To support many active threads, the SPARC architecture requires multiple sets of registers, but as a trade-off requires less speculative register storage than a superscalar design. In addition, coprocessors allow acceleration of cryptographic operations, and an on-chip Ethernet controller improves network throughput.
As mentioned previously, the latest generations, the SPARC T4 and T5, back off slightly from the earlier multithreading design. Each CPU core supports out-of-order execution and can switch to a single-thread mode where a single thread can use all of the resources that previously had to be dedicated to multiple threads. In this sense, these SPARC architectures are becoming closer to other modern SMT designs such as those from Intel.
Server chips, in general, try to maximize parallelism at the cost of some single-threaded performance. As opposed to desktop chips, more area is devoted to supporting quick transitions between thread contexts. When wide-issue logic is present, as in the Itanium processors, it relies on help from the compiler to recognize instruction-level parallelism.
2.3.2 GPU Architectures
Like CPUs, GPU architectures come in a wide variety of options. Here, we briefly discuss several before going into more depth about OpenCL programming for a high-end GPU in Chapter 8. GPUs tend to be heavily multithreaded with sophisticated hardware task management because the graphics workloads they are designed to process consist of complex vertex, geometry, and pixel processing task graphs. These tasks and the pixels they process are highly parallel, which gives a substantial amount of independent work to process for devices with multiple cores and highly latency-tolerant multithreading. It is important to understand that barring sophisticated mechanisms to manage task queues, or to hide SIMD execution behind hardware management systems, GPUs are simply multithreaded processors with their parameterization aimed at processing large numbers of pixels very efficiently.
Handheld GPUs
Handheld GPUs have gained general-purpose capabilities, with ARM, Imagination Technologies, MediaTek, and Qualcomm now offering fully OpenCL-compliant IP. At this scale, GPUs consist of a small number of shader cores, where each executes a large number of individual threads on a small-pixel-size SIMD unit not entirely dissimilar to an SSE vector pipeline. ARM’s Mali-T760 architecture uses three types of computation pipelines in each of up to 16 shader cores. Intercore task management supports managing workloads across the cores: GPU threading, in general, is hardware controlled rather than exposed to the operating system. An embedded design such as the Mali-T760 can share the same global memory with embedded CPUs, reducing the need to copy data across memory spaces; in the ARM design, this data is fully cached.
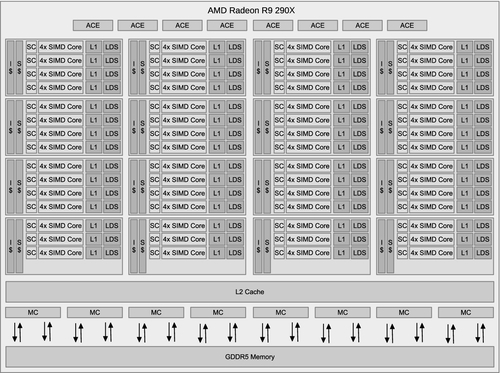
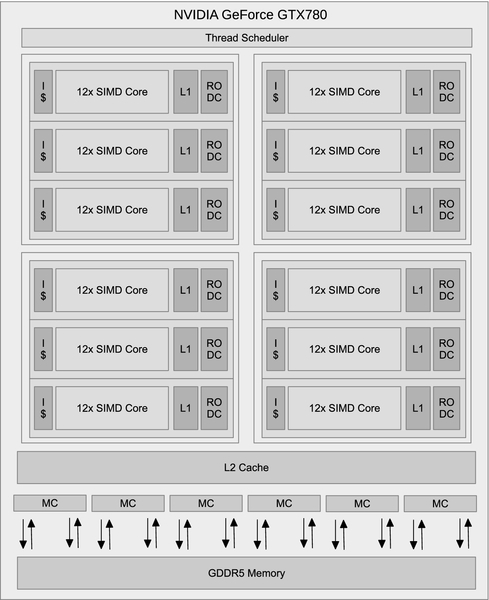
At the high end: AMD Radeon R9 290X and NVIDIA GeForce GTX 780
High-end desktop GPUs and their derivatives for the high-performance computing and workstation segments aim more for performance than maximal power efficiency. To achieve high memory bandwidth, a large number of pins are dedicated to memory traffic, and high-bandwidth-per-pin (possibly lower-latency) memory protocols may be used, such as GDDR5. These devices use a mixture of features to improve compute throughput, including wide SIMD arrays to maximize arithmetic throughput for a given number of issued instructions.
The AMD Radeon R9 290X architecture seen in Figure 2.10 has 16 SIMD lanes in hardware and uses vector pipelining to execute a 64-element vector over four cycles. The NVIDIA GeForce GTX 780 architecture (Figure 2.11) also uses a 16-wide SIMD unit, and executes a 32-element vector over two cycles. Both devices are multithreaded, supporting numerous wide SIMD threads on each core. On the AMD architecture, for example, each core possesses one scalar core and four SIMD units associated with a banked register file: each of those four SIMD units can have up to 10 vector threads (AMD refers to these as “wavefronts”) in flight, one of which can be chosen on each issue cycle for that SIMD unit. That gives a total of up to 40 vector threads per core, and hence 1760 active vector threads across the entire device (or 112,640 individual work-items!). The NVIDIA design offers similarly high numbers: however, in both cases the actual concurrency is limited by the amount of state each thread uses, and the realistic number is likely to be lower.
In the AMD and NVIDIA architectures, the intermediate language that programs the device is a lanewise SIMD model such that the instruction stream represents a single lane of the SIMD unit, an approach that NVIDIA calls “single instruction, multiple thread.”. It has also been called “single program, multiple data on SIMD”. The ISA that this compiles down to may or may not be lanewise, and in the AMD case it is an explicit scalar plus vector ISA where program counters are managed explicitly on a per-wavefront basis and divergent branches are managed using explicit mask registers. We will discuss this in more detail in Chapter 8.
Instruction-level parallelism is achieved in various ways. The AMD Radeon R9 290X design issues multiple instructions per cycle, each from a different active program counter, where one vector instruction will be issued on each cycle to a different vector unit. The NVIDIA GeForce GTX 780 can co-issue two threads at once over four execution pipelines. Older AMD designs such as the Radeon HD 6970 used VLIW instruction issue. In fact, the Radeon HD 6970 and Radeon R9 290X are very similar in their execution unit design, the difference lies largely in the instruction issue, such that one issues in a compiler-structured fashion from one thread and the other issues at runtime from four threads. All of these designs are superscalar in that execution resources can issue memory access, arithmetic, and other operations from threads running on the same core, but not necessarily the same thread, and in this sense they are throughput architectures optimizing the throughput of a set of threads over the latency of a single thread.
Like the mobile GPUs on the market, the high-end AMD and NVIDIA models comprise multiple cores. If we define a core as the closest reasonable mapping to the equivalent in a CPU, the Radeon R9 290X has 44 cores (each with four vector units) and the NVIDIA design has 12 (though each substantially larger, with 12 vector units). Each core has a scratchpad memory buffer known as local memory in OpenCL which is allocated on a per-work-group basis.
It should be clear that the high-end GPU design is heavily weighted toward thread state, allowing fast switching between multiple program instances and high throughput. As opposed to high-end CPUs, GPUs do not rely on complex out-of-order or multi-issue pipelines for single-thread performance. Instead, GPU designs are throughput oriented, and rely very heavily on thread-level parallelism to utilize their large numbers of vector processing units.
2.3.3 APU and APU-like Designs
SoCs have been common in embedded markets for a long time. Currently, there is a move toward SoCs being used for much higher performance systems and applications. Such fused processors, most obviously combining CPU and GPU designs, in addition to the less strongly marketed video decoders, random number generators, and encryption circuits, have become prevalent in the netbook, notebook, and low-end desktop spaces. As transistors have continued to shrink and less performance benefit can be gained from adding additional CPU cores, these SoCs have also permeated high-end desktops. In this space we see the power saving capabilities of integration combined with the substantial compute capability of a discrete GPU that needs only be enabled when higher performance is needed, thus offering power savings overall. Currently, the major architectures in this market are AMD’s Puma-based and Steamroller-based products and Intel’s Haswell products.
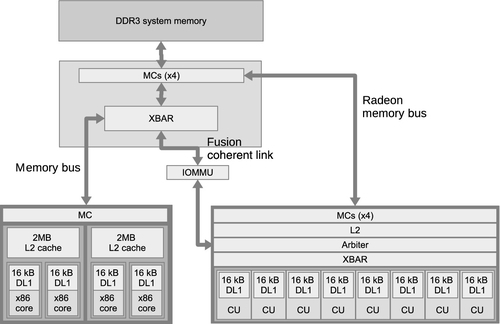
The AMD designs targeted at low-power and low-end mainstream products with a 4.515-W power budget are known as Beema and Mullins, and are based on the low-power Puma CPU core combined with a low-end Radeon R9 GPU. These components are produced together on a single silicon die in a 28-nm process. AMD’s higher-performance APU, Kaveri, is based on the Steamroller core and a significantly higher performance GPU. A simplified Kaveri A10-7850K diagram is shown in Figure 2.12.
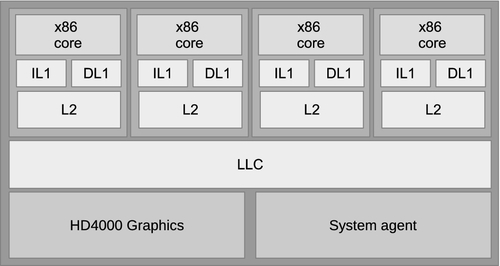
Intel’s high-end Core i7 APU design (Figure 2.13) is based on four cores of the Haswell microarchitecture core discussed previously. The GPU is part of Intel’s HD series GPU design with full OpenCL and DirectX 11 capabilities.
The APU architectures offer scope for sharing data structures between GPU and CPU cores such that the major communication bottleneck of many GPU compute workloads is alleviated. This means that latency can be improved for workloads dispatched to the GPU, and more tightly integrated algorithms between GPU and CPU cores can be created that are currently not practical owing to performance constraints arising from the latency of the PCI Express bus. This improvement comes at the cost of CPU-style memory bandwidth shared between both devices, losing the very high bandwidth exotic memory interfaces of discrete GPUs. It is likely that this trade-off is advantageous in the wide range of algorithms that are inefficient when they are implemented purely on the GPU. This advantage may come either because the GPU’s throughput-based design is suboptimal for serial code, and the APU design may reduce the turnaround time of mixing CPU and GPU code, or because the algorithms are communication bottlenecked.
2.4 Summary
In this chapter, we discussed the types of architecture that OpenCL might run on and the trade-offs in the architectural design space that these architectures embody. After examining OpenCL more closely, in Chapter 8, we discuss how the OpenCL model maps to a specific architecture in the form of a combination of a Piledriver-based AMD FX-8350 CPU and a Radeon R9 290X GPU.
The content of this chapter will benefit from further reading; however, for many of the specific devices, concise references can be difficult to find. The fourth edition of Computer Organization and Design [8] discusses many architectural issues in depth and various other processor designs. It also contains a section on NVIDIA’s GPU architecture. The fifth edition of Computer Architecture [9] extends these concepts.