Part IVRobot Hardware
We now come to the last part of this book, where we learn how to design and build the electronic hardware required to control and move a robot. If you are a hobbyist and a maker, then you will likely try to build everything from scratch by yourself, which is always the best way to understand how things really work. If you are a robotics service technician, you will be more likely to purchase industrial-grade PCs and servo drives already available on the market. Nevertheless, this chapter can still be useful to gain a better understanding on the internal details of the hardware you use and hopefully get the best performance out of it.

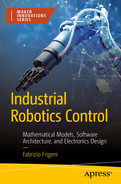
An illustration of the essential hardware components needed to drive a robot, motors, encoders, drives, controller, power supply, and H M I.
Basic hardware configuration required to drive an industrial robot
Motors: While technically any kind of actuator can be used to bring the joints into motion (e.g., hydraulic actuators are often used for large hexapod platforms), the vast majority of industrial robots rely on electric motors to do the job. We will look at different kinds of electric motors and explain how to choose the right one for the application.
Encoders: High-quality motor control requires the knowledge of the rotor’s position (see servo loop structure and FOC commutation technique described in Chapter 9). The position feedback to the closed-loop controller is provided by an encoder attached to the motor shaft. We will describe some different kinds of encoders and their communication interfaces to the servo drives.
Drives: Running a motor requires an electronic drive, and different kinds of motors require different kinds of drives. Considering that the vast majority of industrial robots work with permanent-magnet synchronous motors, we will focus here on servo inverters.
Power supply: All electronic components require power to run. Microcontrollers run at 3.3V and consume much less than 1W. Motors can run at a few hundred volts and often consume power in the kW region. We will analyze the different power requirements of all the electronic parts in a robotics control system.
Controller: The main controller is the brain of the robot, where most of the control software runs. It includes some IOs to connect to external equipment and a fieldbus to connect to the drives. Industrial robots’ controllers typically rely on powerful multicore CPUs and large memory banks. However, today’s processors are cheap and powerful, so even a small MCU can achieve great results by running complex motion calculations in short cycle times at a fraction of the cost. We will show how to design a simple MCU-based robot controller.
HMI: As a developer, you normally program and deploy your code to the controller. However, you also need to provide a simple interface for the operator to configure the required parameters and send commands to the robot. That is usually done by a visualization panel, where hard and soft keys allow for configuration and operation of the robot. Older-style robots used an external teach-pendant hardwired to the main controller. Modern solutions rely on consumer tablets with touch screens and Wi-Fi connection to the robot.
At the end of the hardware section, we also add some details about practical fabrication: we describe how to design your own PCB and have it manufactured in a quick and cheap way for series production; we also suggest some ways to design and produce mechanical parts in case you want to build the robot’s frame body on your own.
Traditionally, all robot’s driving electronics (power supply, main controller, and motor drives) were confined in an electric cabinet, with long thick cables reaching out to the robot’s body, where the motors and the encoders are placed. A more modern and convenient approach, especially for low-power robots and all cobots, is to integrate the electronics inside the robot’s mechanical structure: the servo drives are directly attached to the motors and the main controller embedded in the base. The resulting solution considerably saves space and wiring costs.