Processes play a major role on an operating system. When you execute a computer program in your system, it is done with a process. Without processes, you aren’t able to do any activity on an OS. In this chapter, you look at processes and how to perform various tasks. You also see various types of processes that can occur during the execution of a program.
Introduction to process environments
Linux subsystems
Process creation
A zombie process
An orphan process
System calls for process management
Signals and their types
System calls for signal management
Introduction to the Process Environment
An executing program is considered a process. To get a deeper understanding of a process, you need to be familiar with the process environment. Let’s consider the internal working mechanisms of a normal C program that is subjected to the kernel for execution. You are already know that every C program execution starts with the main() function; but behind the scenes, a special start-up routine is called by the kernel before calling the main() function.
When you compile C code, an executable is generated by the compiler. This executable program contains the starting address of the start-up routine set up by the linker when the program is executed. But when ASLR (address space layout randomization) is enabled, the startup routine address is unpredictable. ASLR is a memory protection mechanism that resolves buffer overflow issues by randomizing the location. This startup routine usually takes a kernel. That type of argument is called a command-line argument .
argc takes an integer type as an argument that contains the number of command-line arguments passed by the programmer. The parameters that are passing to the command line should be space separated. This means if you pass hello world, it is considered two different arguments, but hello_world is a single argument. If you want to pass a spaced single argument, it is advisable to pass it inside double quotes (i.e., “hello world”), which is also considered a single argument.
argv takes a character array type as an argument. It deals with the array of pointers that point to the argument values.

Output of C program for command-line arguments
The program is named “Command Line Arguments.c”. The gcc compiler compiles this program. After the compilation is done, the programmer run the program. This program was run with five types of command-line values. A loop to print all the command-line values was written. This program prints all the passed arguments and the number of arguments. There is an odd behavior that you can observe in the output: there were six arguments passed because it counted the executable file value as well.
Environment List
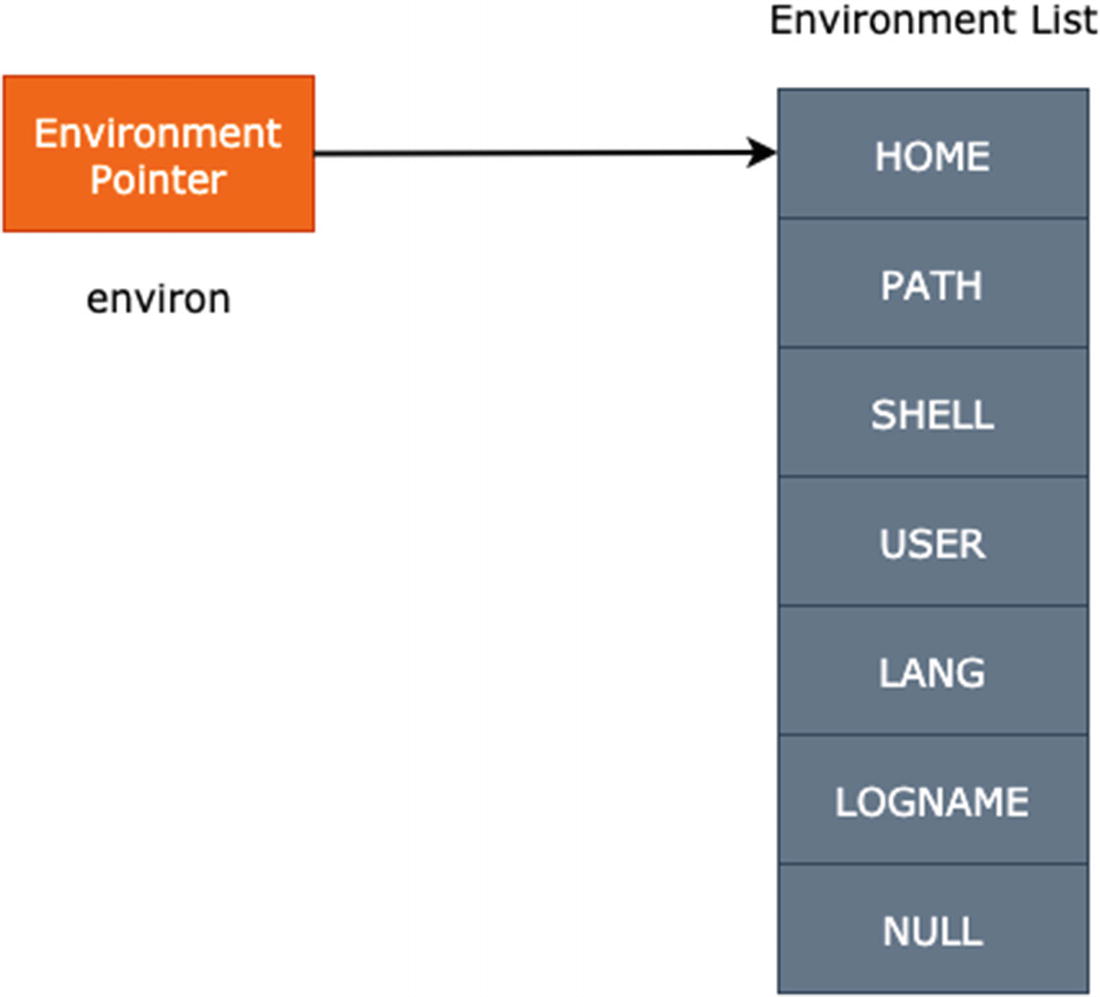
Environment variables list
Environ is an environment pointer that points to the environment list, which consists of string data.
The environment list consists of predefined variables and custom process variables. All the predefined values are in uppercase format.
The format of an environment list is name=value.
The executing program is also present under this environment list variable.
This program prints all the environment variables in your operating system and the variables defined in your current session/program. The list of values that are printed by the program contain your program execution file as well.

Output of the environment variable list using C program
Memory Layout of a C Program

Memory layout
The entire memory layout is divided into several blocks. Each block has a separate functionality associated with it.
Command-Line Arguments
The command-line argument block accepts all the values explicitly passed by the programmer. This block also contains environment variables.
Stack
A stack is used for static allocation in a program. It stores all the automatic variables. The function call’s results are stored in the stack area, but you can’t estimate or predict exactly where a function call’s results will store. It depends on the hardware architecture. Function call results are ABI (application binary interface) dependent. The values stored in the stack are directly stored in RAM (random-access memory). Access time for items in the stack space is very fast.
Heap
A heap is used for dynamic memory allocation. Allocation of memory is done at runtime and accessing the items present in a heap space is slower than in a stack space. The size of the heap is limited to the size of your virtual memory.
Uninitialized Data
The kernel assigns the data present in this segmented block to an arithmetic zero or the NULL pointer before the program starts executing. This block is also called a BSS block, which is a block started by symbol. Global and static variables that don’t have any explicit initialization in the program are stored in this data block. This block contains only uninitialized data.
Initialized Data
Global and static variables initialized by the programmer with predefined values in the program are stored in the initialized data block.
Text
The text block contains the machine code/instructions the CPU needs to execute.
Process Termination Methodologies
When a main() function returns the value, the process is terminated.
When you call an exit() function, which is available in the stdlib.h library, to terminate a process.
When you call the _Exit() or _exit() functions available in stdlib.h and unistd.h, respectively, to terminate a process.
When you call pthread_exit to terminate the process.
When you call an abort() function to abnormally terminate the process.
When the programmer raises a signal, the process is terminated abnormally if the custom handler or built-in signal handler is not available. But you can handle the signals with a custom/built-in signal handler.
Thread cancellation requests are also responsible for process termination. A thread cancellation request is the termination of a thread before its job is done in the process.
Any I/O failure/interrupt leads to process termination. For example, if the process is waiting for input from a scanner but the scanner is not working, this leads to process termination. If there is any custom exception handler code available, this situation is handled easily without the process being terminated.
In some situations, a child process is terminated because of a parent process request.
A process is terminated when it is trying to access unallocated or unauthorized resources. For example, when a process tries to execute a program that doesn’t have execution permissions, it leads to process termination. When a program tries to access memory that it does not own, it leads to process termination.
The process environment consists of the environment List, memory layout, and process termination. Memory layout deals with how program data is organized in the system memory for better access. In contrast, an environment list deals with storing all the processes that are running on an operating system. Finally, process termination methodologies terminate a process normally or abnormally, based on the programmer’s requirements. Abnormally terminating a process is done when something unexpectedly happens to a program, so the programmer kills the process abnormally.
Environment Variables
Every process has an environment block that contains environment variables. An environment variable is a dynamic variable that deals with the processes and programs in an operating system.
User-level environment variables
System-level environment variables
User-Level Environment Variables
User-level environment variables belong to a specific user in an operating system.
System-Level Environment Variable
The variables in a system-level environment can be accessed by every user in the system.
Environment Variable Examples
List of Environment Variables
Variable | Description |
|---|---|
PWD | It prints the present working directory. |
HOME | It prints the default path to the user’s home directory. |
SHELL | It prints the location of the shell used by the user. |
UID | It prints the user’s unique ID. |
HOSTNAME | It displays the computer’s hostname. |
Accessing an Environment Variable
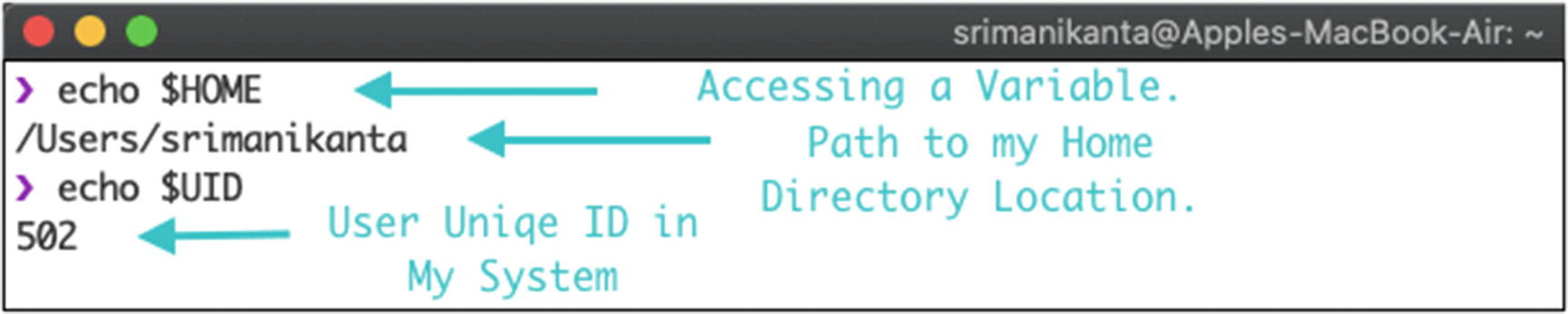
Accessing environment variables using CLI (command-line interface )
Syntax ➜ echo $VARIABLE_NAME

Creating environment variable using CLI
Variable names are case sensitive. You need to be very careful when accessing data from a variable. The name needs to match exactly to get data from the system.
Setting a New Environment Variable
You can create your own environment variables with the following syntax.
Syntax ➜ VAR_NAME=VALUE
Example ➜ MY_VARIABLE=/Users/Home
The key point to remember in declaring a variable is that there is no space between the variable name and the value, as shown in the syntax. If there is a space between the name and the value, an error is thrown.
In bash, there is a built-in command named export. If you want to set the environment variable permanently, the export command is useful. This method sets the environment variable for temporary purposes only. It is not available once the terminal session is closed. The export command exports the variable to the permanent system environment variables list, which is not deleted until you delete it explicitly.
Deleting Environment Variables
Deleting an environment variable is done with the unset command.
Syntax ➜ unset VARIABLE_NAME

Deleting environment variable using CLI
If you try to access an environment variable that was deleted, you get NULL as a result.
Accessing Environment Variables in C

Printing the environment variable using C
Setting a New Environment Variable Using C
envname takes the name of the variable that you want to create as an environment variable.
envval takes the environment variable value that you want to assign to the created value.
overwrite takes the integer value as argument (i.e., either 0 or 1). A 0 doesn’t overwrite an existing variable value; 1 overwrites the value. If the variable already exists in the environment, a non-zero value overwrites it.

Output of environment variable creation in C
The successful creation of a variable prints a successful message; otherwise, an error message prints.
Deleting an Environment Variable
The name variable takes the environment variable name, which you want to delete.

Output of environment variable deletion using C
Kernel Support for Processes

Linux kernel-level subsystem
Process Scheduler
Preemptive scheduling algorithm
Non-preemptive scheduling algorithm
Preemptive Scheduling Algorithm
In a preemptive scheduling algorithm , the process is interrupted before the completion of the process task.
Starvation occurs after adding a high-priority process to the queue.
CPU utilization is high in preemptive scheduling. In preemptive scheduling, you can keep the CPU as busy as possible with multiple processes.
Resources are allocated for a limited time.
Non-Preemptive Scheduling Algorithm
In a non-preemptive scheduling algorithm, a process is not interrupted until its task are finished.
CPU utilization is low. The CPU does not allow other processes to utilize resources.
The process utilizes resources until the task is done.
Memory Manager
It deals with the implementation of virtual memory, demand paging, and memory allocation for kernel-level space and user-level space programs.
It maps the files required to run a process.
It effectively manages interprocess communication tasks.
Virtual File System
It acts as a bridge between various file systems, like Windows and macOS. This file system easily communicates with other OS file systems.
It accesses different types of files from various file systems in a uniform way.
It transparently handles data from network storage devices.
Network Unit
It manages certain types of protocols used by network hardware to transfer data between systems.
It manages all the network hardware drivers in a system to establish effective communication.
Process Creation
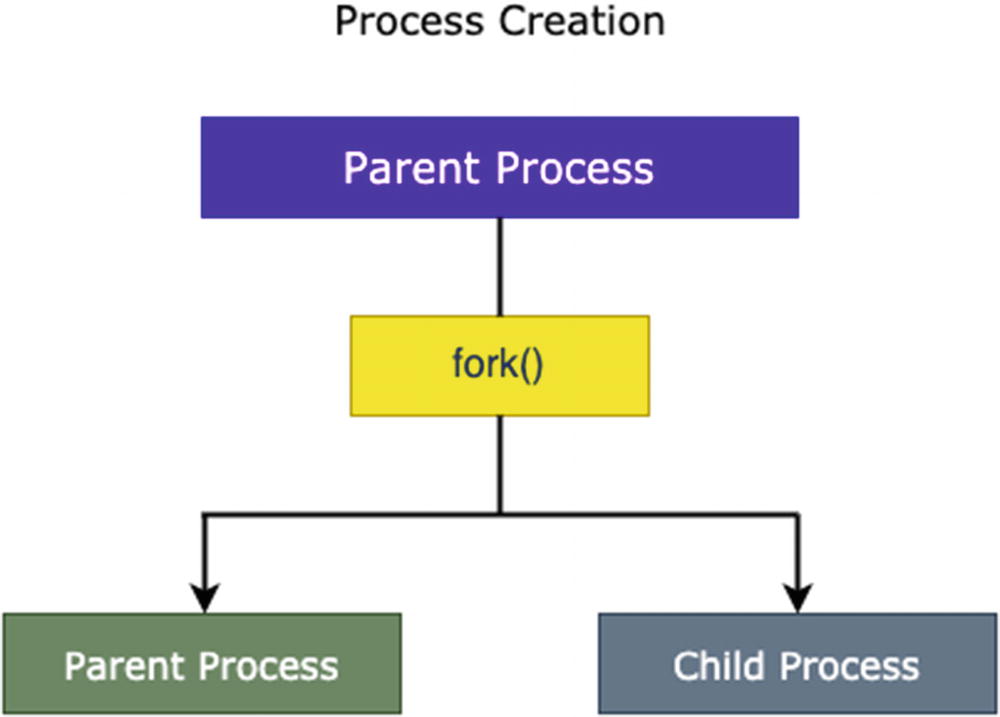
Mechanism of process creation
- 1.
Programmer requests the process be created by the program
- 2.
System initialization
- 3.
Batch job initialization
- 4.
Execution of the fork() system call by the running process

Internal mechanism of fork() system call
When a process is created with a fork() system call, two processes (i.e., child and copy of the parent processes) are created. When the main program creates parent and child processes, they try to execute simultaneously. This achieves concurrency in the program.

Output of the program on process creation using C
Zombie Process
A zombie process is any process that has finished executing, but entry to the process is available in the process table for reporting to the parent process. A process table is a data structure that stores all the process-related information in an operating system. A process that is not removed from the process table is considered a zombie. The parent process removes the process entry with the exit status of the child process.
In this program, the fork() function creates a new child process. If the child_process value is greater than zero, it is a parent process. If the child process ID is equal to zero, it is a child process. If it is a child process, the program is terminated; otherwise, the parent process is under execution in a sleep state. Meanwhile, the child process is terminated, but the process ID is in the process table, making the child process a zombie.
Orphan Process
When the task of the parent process finishes and terminates without terminating the child process.
When an abnormal termination occurs in the parent process.
In this program, the parent process completes its execution and exits while the child process is in execution, so it is considered an orphan process. If there is no parent for a process, then that process is adopted by the init process.
System Calls for Process Management
vfork
exec
wait
waitpid
kill
exit
_Exit
vfork System Call
A vfork system call creates a new process, but the behavior is undefined in certain circumstances. If the process is created using a vfork system call, the parent process is blocked until the child block is executed. In the vfork system call, the child process shares a common address space as the current calling process. Since they share the common address space, changes in the code are visible to other processes. The return type of this system call is an integer. When a child is successfully created, it returns 0 and the child process ID to the parent process. If any error occurs, it returns –1.
It takes zero arguments but creates the child process and blocks the parent process.

Output of process creation using vfork() system call
The vfork() system call is removed from POSIX standards due to its undefined behavior in certain circumstances.
exec System Call Family
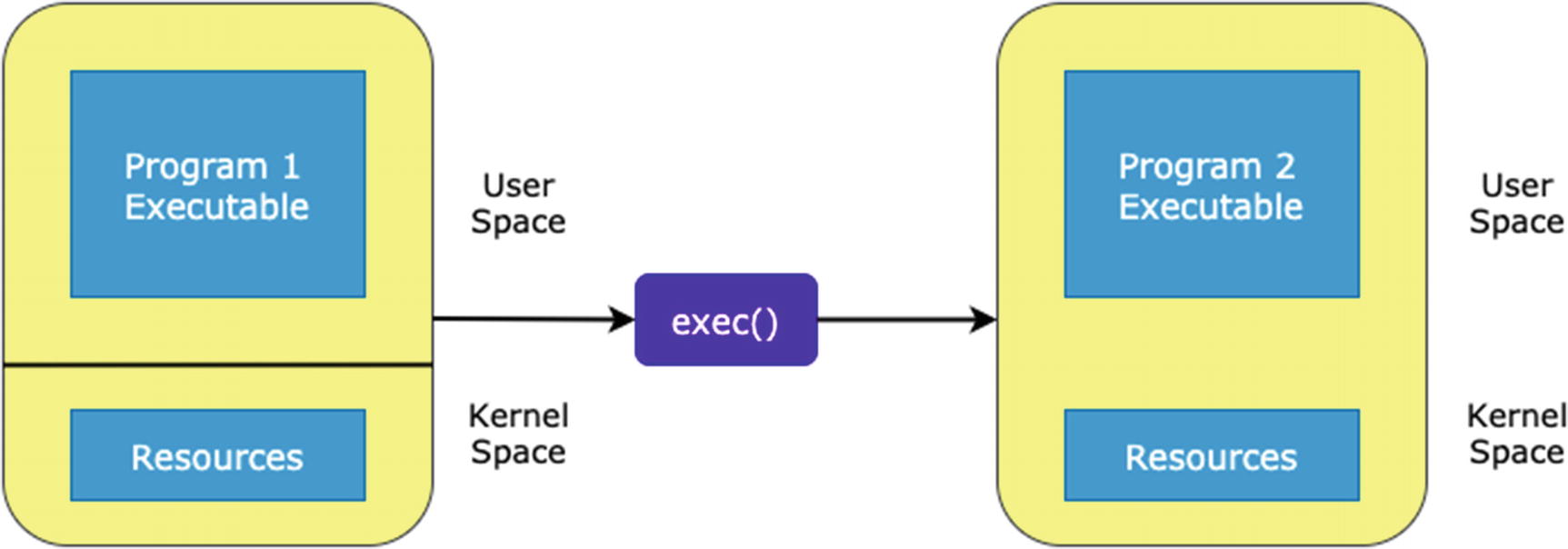
Working mechanism of exec system call
execl
execlp
execle
execv
execvp
execve
execl( )
This system call takes the first and second parameter as a path of the binary executable. and the remaining parameters are the ones that you need to pass as based on your interest; that is, optional parameters or flags that are required for the executable program and purpose followed by a NULL value. This system call is available in the unistd.h library. The return type of this function is an integer. If the execution is unsuccessful, it returns –1; otherwise, it returns nothing.
path takes the binary executable with the complete path.
arg also takes the binary executable path as an argument.
[...] considers the variable number of arguments, which means you can pass any number of arguments.
NULL is the default parameter, which the execl function’s last parameter should be.
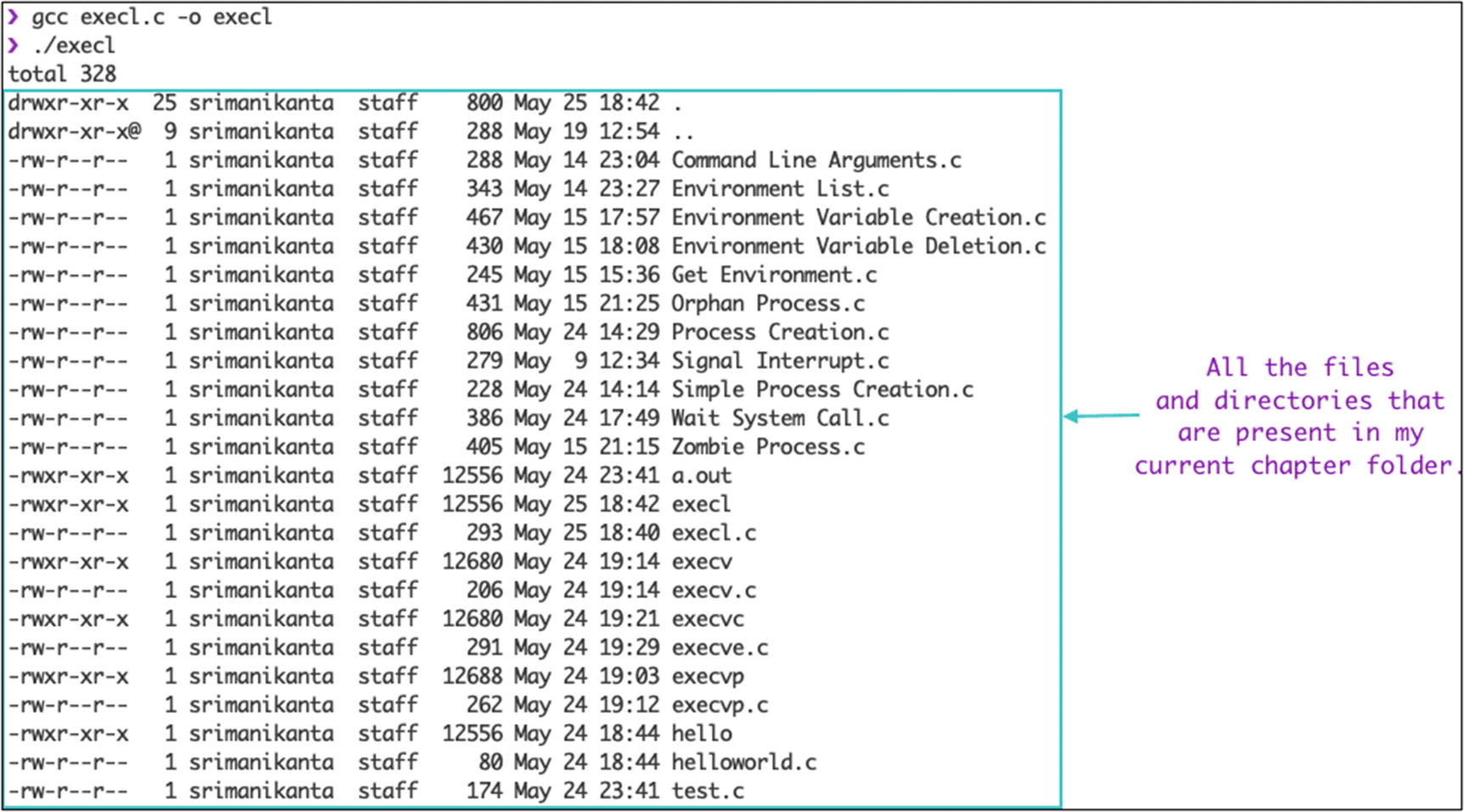
Output for the execl system call
execlp( )
This system call is a bit more advanced than the execl() system call. It does not require the path for the binary built-in executable, but for custom executables, it does require the path to execute. The return type of this system call is an integer. It returns –1 if any error occurs and returns anything for successful execution.
path takes the binary executable with the complete path.
arg also takes the binary executable path as an argument.
[...] considers the variable number of arguments, which means you can pass any number of arguments.
NULL is the default parameter, which the execl function’s last parameter should be.

Output for execlp() system call
execle( )
This system call works similarly to the execl() system call. The major difference is that you can pass your own environment variables as an array. You can access the environment variables from the envp constant array pointer. The return type of this system call is an integer. It returns –1 on an error and returns anything for the successful execution of the executable.
path takes the binary executable with the complete path.
arg also takes the binary executable path as an argument.
[...] considers the variable number of arguments, which means you can pass any number of arguments.
NULL is the default parameter, which the execl function’s last parameter should be.
envp is an environment pointer variable that lets you access the environment variables from the array. The last element of the array is a NULL value.

Output for execle() system call
execv( )
This execv() system call is slightly different from this all three system calls. In this system call you can pass your parameters as an argv array that you want to execute. The last element of this array is a NULL value. The return type of this system call is an integer value. It returns –1 on an error and returns nothing on success.
The path argument points to the path of the executable that is being executed.
argv is the second argument. It is a NULL-terminated array of character pointers.

Output for execv() system call
execvp( )
This system call works the as same as the execv() system call. The major difference is that you don’t need to pass the path for system executables like an execlp() system call. The execvp() system call tries to find the path of the file in an operating system.
In the following example, the ls command is a program name. The execvp() system call automatically finds its path in the system and performs the action.
file points to the executable file name associated with the file being executed.
argv is a NULL-terminated array of character pointers that contain the executables information.

Output for execvp() system call
execve( )

Output for execve() system call
wait System Call
In some situations, a process needs to wait for resources or for other processes to complete execution. A common situation that occurs during the creation of a child process is that the parent process needs to wait or suspend until the child process execution is completed. After the child process execution completes, the parent process resumes execution. The work of the wait system call is to suspend the parent system call until its child process terminates. This wait system call is available in the sys/wait.h header file. The process ID is the return type of the wait system call. On successful termination of the child process, it returns the child process ID to the parent process. If the process doesn’t have any child processes, the initiated wait call does not affect the parent activity. It returns –1 if there are no child processes. If the parent process has multiple child processes, the wait() call returns the appropriate result to the parent when the child processes have terminated.
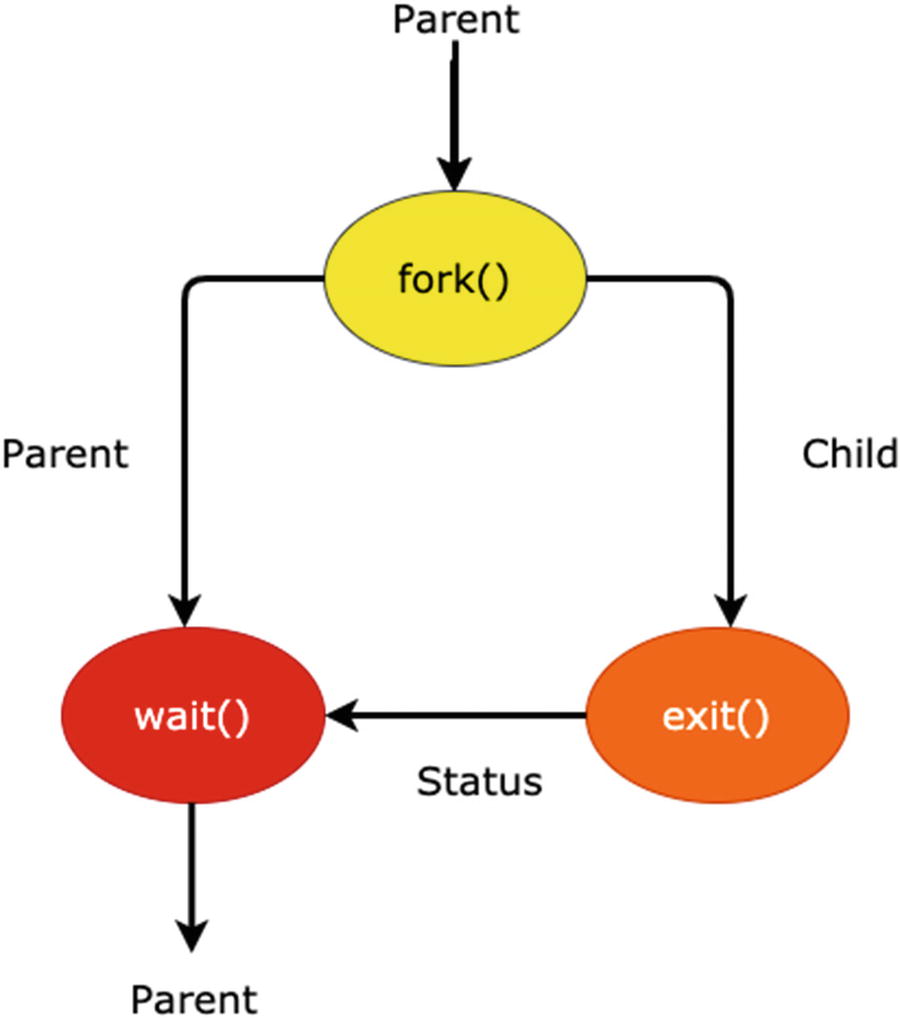
Working mechanism of wait() system call

Output of the C program for wait() system call
waitpid System Call
The waitpid() system call is an advanced version of the wait() system call. It takes three parameters as arguments. The first parameter takes the child process identifier. The second parameter deals with the status of the child process and stores the status code of the child process. The third parameter is an options parameter that takes several options to get the child process-related information. The values that are passed to this argument are built-in macros. The return type of the waitpid system call is a process ID. If an error occurs, it returns –1.
The following are options parameters.
WIFEXITED(status): It checks if the child exits normally or not.
WEXITSTATUS(status): It returns the status code when a child exits.
WIFSIGNALED(status): It informs the child exit status if the child exits because a signal was not caught.
WTERMSIG(status): It gives the number of terminating signals.
WIFSTOPPED(status): It returns the status information when the child stops execution.
WSTOPSIG(status): It returns the number of stop signals in a program.
WUNTRACED: It returns the child status that has stopped, but it doesn’t trace the child.
WNOHANG: It returns the status immediately if the child exits.
WCONTINUED: It returns the status code if a signal resumes the stopped child process.

Output of C program using waitpid() system call
kill System Call
A kill system call kills processes and signals. Killing a signal or process is the termination of a program/process/signal. The return type of this kill system call is an integer value. It returns 0 on the successful execution of the system call; otherwise, it returns –1 for an error.
pid takes the process identifier of the process.
sig takes the built-in signal parameter that needs to send to the process.

Output of the C program for kill() system call
exit System Call
An exit system call exits the calling process without executing the rest of the code that is present in the program. It is available in the stdlib.h library. The return of this system call is void. It doesn’t return anything on execution.
status takes the value that is returned to the parent process.

Output of the C program for exit() system call
_Exit System Call
_Exit terminates the process normally, but it doesn’t perform any cleanup activity. This system call is available in the unistd.h library. The return type of this system call is void. It doesn’t return anything. After the process is terminated, the control is given to the host environment (currently running) in this system call.
status takes the value, which is returned to the parent process.
This code does not give any results. It simply terminates the process and returns control to the host environment.
Introduction to Signals
A signal is a software interrupt or an event generated by a Unix/Linux system in response to a condition or an action. There are several signals available in the Unix system. All signal mechanisms are implemented in the signals.h library. In this section, the signals.h library is used to create custom signals and to handle the signals that are created by the system. When a signal is raised, the kernel is guided as discussed next.
Catch the Signal
When the kernel raises a signal, you can create a custom routine to handle the signal. But to use your custom handling routines, the process needs to register the custom routine before the processed signal is delivered to the user space.
Ignore the Signal
When the program is raising a signal, and that signal has no effect, you go to the ignore case. This ignores the signal that does not affect the program, but you need to explicitly mention it before the signal is delivered. All signals can’t be ignored. The signals that have no effect on raising a signal can be ignored.
Default Action
When a program raises a signal, and that signal is neither caught nor ignored, it is handled by the default built-in signal handler that is defined by the system. It is an implicit system behavior meant for handling the signal. But a process can explicitly request to use the built-in signal handler in the program. Default handlers do not always terminate a process.
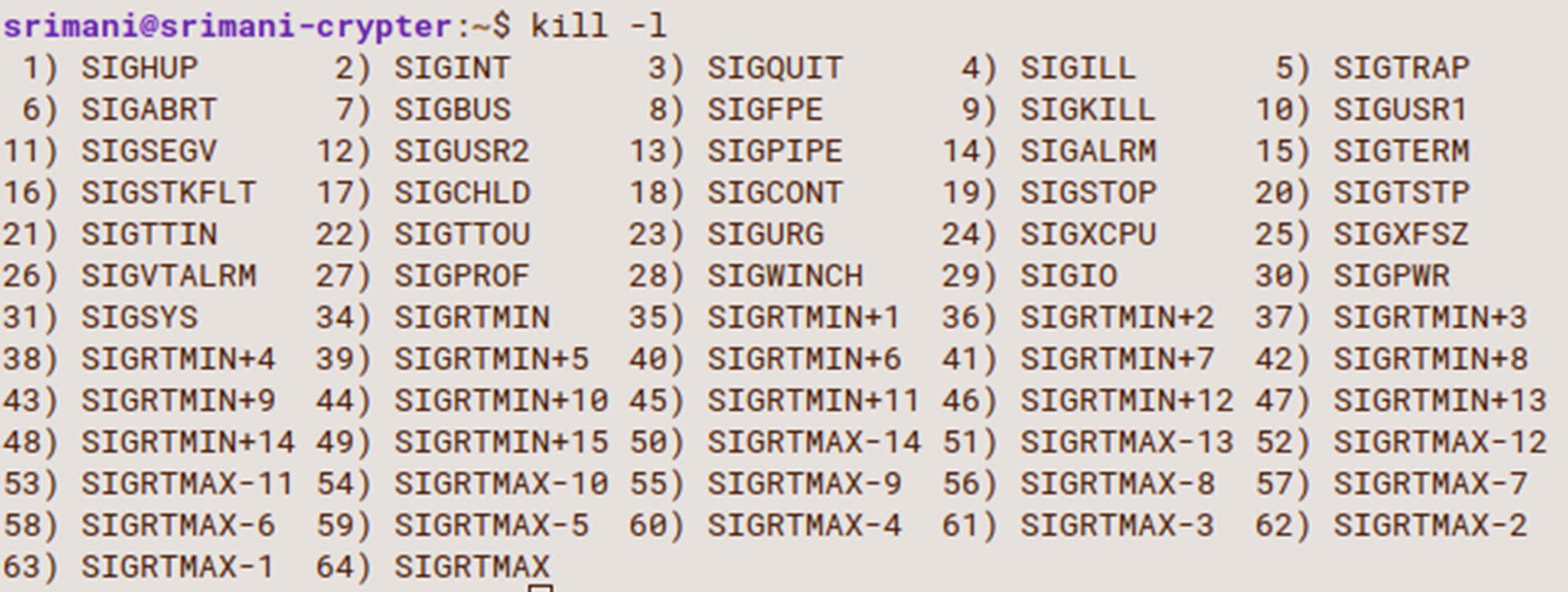
List of all the built-in signals
Signals and Their Functionality
Signal Name | Signal Number | Signal Functionality |
|---|---|---|
SIGHUP | 1 | Hang up a signal |
SIGINT | 2 | Interrupt (Ctrl+C) |
SIGQUIT | 3 | Quit (Ctrl+D) |
SIGABRT | 6 | Process Abort |
SIGKILL | 9 | Kills the process without cleanup activity |
SIGUSR1 | 10 | User-defined signal 1 |
SIGSEGV | 11 | Invalid Memory Segment Access |
SIGUSR2 | 12 | User-defined signal 2 |
SIGALRM | 14 | Alarm Signal |
SIGTERM | 15 | Program/Software Termination Signal |
SIGCHLD | 17 | Child process has stopped or exited |
SIGCONT | 18 | Continue Execution |
SIGSTOP | 19 | Stop Execution |
SIGTSTP | 20 | Stop Signal |
SIGTTIN | 21 | Background process trying to read |
SIGTTOU | 22 | Background process trying to write |
The actual list of signals may vary between Solaris and Linux. All the signal lists are available in the signal.h library. By using signals, you can set traps and interrupts. In the C standard library, there is a signal() system call that creates the signals. The return type of the signal system call is a pointer to a function that takes the single integer parameter and returns nothing (i.e., void). If successful, this system call returns the previous action. If any error occurs, it returns SIG_ERR to indicate the error. This system call also has a typedef version that is easy to read and understand. But in this chapter, you are dealing with the syntax of the original signal system call.
sig takes the signal number. The signal number completely depends on the purpose and the type of signal you want to send.
- function is a pointer that points to either the function implemented by the programmer or the built-in ones. These are the built-in functions.
SIG_DFL handles the signal by default. It is considered the default handling of signals, which means it sends the interrupt that is caused by the program.
SIG_IGN ignores the signal that is caused by the program.
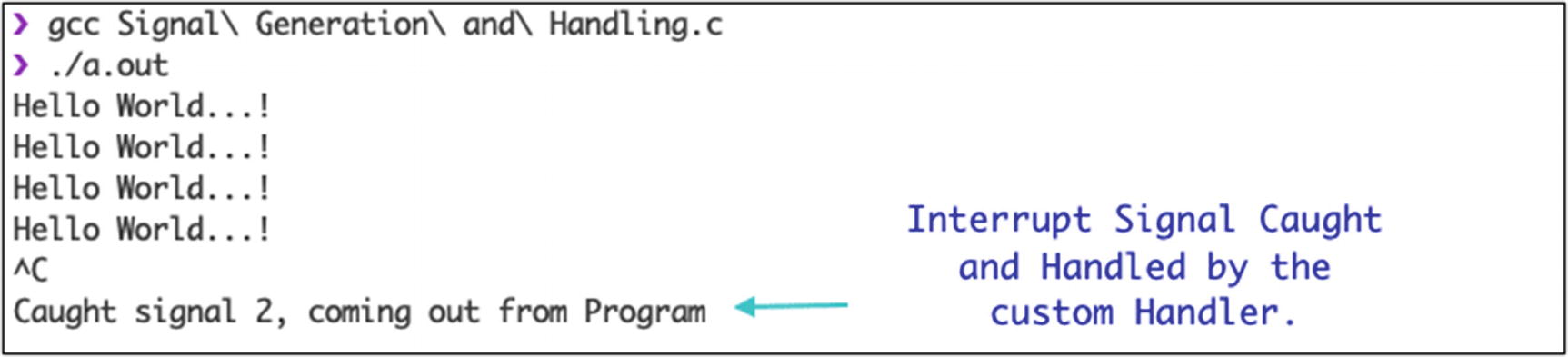
Signal generation output
Types of Signals
In Unix/Linux, signals are classified into two types based on functionality: unreliable and reliable.
Unreliable Signals
Signals that doesn’t have any available installed signal handler and become lost means the process never knows about the signal that is being raised by the system. A process has very little control over unreliable signals. The process can catch a signal or ignore it, but blocking a signal is not possible with unreliable signals. A blocking operation means intimating the operating system explicitly to hold the signal for a certain time and releasing it when asked by the program.
Reliable Signals
Signals that are not lost in the system are reliable. The process has complete control and can catch, ignore, and block signals using system calls. These signals are the enhanced version in Unix-based system.
System Calls for Signals
raise
kill
alarm
pause
abort
sleep
raise System Call
A raise system call raises a signal by the process itself. The return type of this system call is an integer. This system call returns zero on success and nonzero if a failure occurs.
sig is the signal number that needs to be sent. This parameter depends on the type of signal you want to raise explicitly to the process itself. The signal numbers are from the built-in signals list.

Output of the raise system call
kill System Call
A kill system call sends signals to other processes as well itself. A kill system call can also kill processes. The killing/terminating of a signal is similar to killing/terminating a process in an operating system.
alarm System Call
In signals, there is an alarm clock facility that schedules the signal trap for the future. This system call is used by the process to schedule the SIG_ALARM signal. The return type of the alarm system call is an unsigned integer. It returns the number of seconds remaining in the set time that is to be delivered. If no alarm is set, it returns 0.
seconds takes time in the form of seconds. The second’s value must be a positive number.

Output of the alarm system call
pause System Call
The pause system call suspends the execution of a program until a signal occurs. The return type of a pause system call is an integer. It takes 0 parameters. It returns –1 on failure; otherwise, it returns the respective signal catching function.

Output of pause system call
abort System Call
The abort system call terminates the program or process abnormally. This system call returns a void type. It takes zero parameters. This system call sends the SIGABRT signal to the process to terminate. This signal is not able to be overridden by other signals. This system call does not close all the files and pointers opened by the process since it causes an abnormal termination of the program.

Output of the abort system call
sleep System Call
This sleep system call sleeps the thread until the specified number of seconds have elapsed or a signal hits (which is not ignored). The return type of this system call is an unsigned integer. It returns 0 if the requested time has elapsed, or the number of seconds left to sleep if the call is interrupted by a signal handler.
seconds takes the number of seconds that the process or thread wants to sleep as an argument.
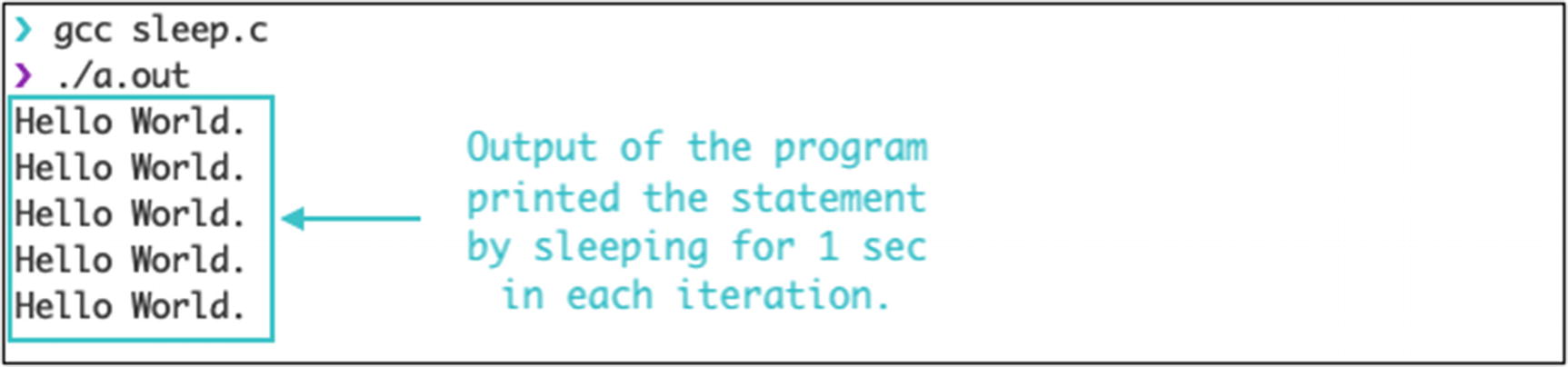
Output of sleep system call
Summary
You looked at the environment variable and how to create it programmatically and by using commands.
You explored the memory layout of the C program and how things are stored in a computer’s memory.
Kernel support for the process teaches you about the Linux subsystem. In the Linux subsystem, you looked at various management schemes done by the Linux kernel internally.
The creation of processes achieves concurrency. You learned a lot about how to create processes using built-in system calls in C.
You learned that a process could become a zombie or an orphan.
You learned about the various system calls that are available for process management. The system calls include vfork(), wait(), waitpid(), kill(), execv family system calls, and exit(), and _Exit() system calls.
You saw signals and traps set in a program to create your custom interrupt in a program. You learned types of signals and system calls for signal management include abort(), sleep(), pause(), alarm(), raise(), and kill().
You now know the core concepts of process and signals in an operating system. You should be able to work with your custom applications and scripts in a very comfortable manner.