32 ◾ Vehicle Scheduling in Port Automation
3.2.1 Assumptions
We assume that the storage area is divided into the short-term and medium-term
storage types. ese two storage types are usually referred to as the primary and
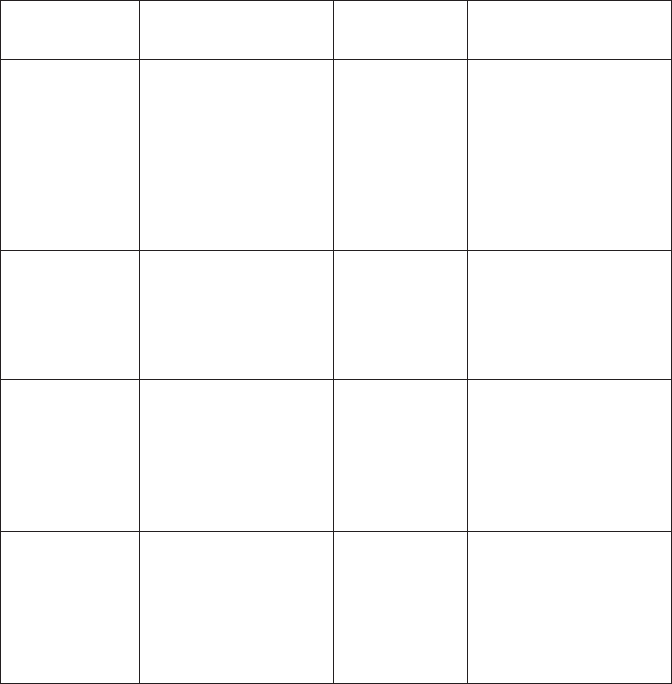
secondary (urston and Hu 2002). Figure3.3 shows a layout of the port with
these types of storage. e purposes of the primary storage are to store transit con-
tainers (Henesey, Wernstedt, and Davidsson 2003) (from one ship to another), to
minimize waiting times of QCs and ships (urston and Hu 2002), and to be used
in emergency situations such as deadlock of the vehicles. e secondary storage
is where the inbound containers are picked up by their consignees and the out-
bound ones are brought in by customers. e QCs and RTGCs handle containers
Table 3.2 (Continued) Major Research Done around the Storage Space
Assignment in Container Terminals
Researchers
(Year)
Modeling
(Algorithm)
Experimental
Data Size Main Results
Henesey,
Wernstedt,
and
Davidsson
(2003)
followed
Frankel (1987)
Multi-agent system
(searching,
coordinating,
communicating, and
negotiating with
other agents via a
market-based
mechanism)
Not
mentioned
Provide a simulator to
run scenarios
(dynamic yard and
dynamic berth
allocation)
Murty etal.
(2005)
A multi-commodity
network ow and
integer
programming
(CPLEX)
Data from
Hong Kong
Port
A decision support
system
Delgado etal.
(2009)
Constraint
programming
(branch-and-bound
and a column-
generation
approach)
Not
mentioned
Improved the
performance of the
branch-and-bound
Güvena and
Türsel (2014)
Mathematical
programming
model (two
dynamic strategies
for stacking
containers)
Data from
Port of
Izmir in
Turkey
Strategy 2
outperforms random
stacking in terms of
the number of
reshufes performed

Formulations of the Problems and Solutions ◾ 33
in the primary and secondary area, respectively. e size of the secondary storage is
usually greater than the primary.
Our approach is to consider the interaction of containers between the primary
and secondary storage types. Based on the layout of storage, containers are classi-
ed into the following six types, according to their status at dierent stages:
1. Primary storage containers to secondary storage (PSCSS): Containers in the
primary storage waiting to be moved to the secondary storage.
2. Secondary storage containers to primary storage (SSCPS): Containers in the
secondary storage waiting to be moved to the primary storage.
3. Secondary storage container pickup (SSCPI): Inbound containers in the secondary
storage waiting for pickup by consignees.
4. Secondary storage container grounding (SSCGD): Outbound containers before
being allocated to the secondary storage.
5. Primary storage container pickup (PSCPI): Outbound containers in the pri-
mary storage waiting to be loaded on the arriving vessels.
6. Primary storage container discharging (PSCDS): Inbound containers being dis-
charged from the arriving vessels to be allocated to the primary storage.
Vehicle
Quay and
QCs
Primary
storage
QC
RTGC
Secondary
storage
QC’s controller
Figure 3.3 Port’s layout with the primary and secondary storage types. (From
Thurston, T., and Hu, H., “Distributed Agent Architecture for Port Automation,”
Proceedings of the 26th Annual International Computer Software and Applications
Conference, Oxford, England, August 2002.)
34 ◾ Vehicle Scheduling in Port Automation
e following assumptions are considered to formulate this decision:
Assumption 3.2.1: As stated in Chapter 2, the storage areas are divided into dif-
ferent blocks. In this decision, it is necessary to determine which blocks and
how many spaces in them are to be allocated to the six types of container.
Assumption 3.2.2: Several QCs might be busy with other operations. So we
assume that there is a tight constraint on the minimum and maximum of
QCs in the primary storage during each time period.
Assumption 3.2.3: Our objectives are to balance the workload of RTGCs in the
secondary storage (Zhang etal. 2001) and to minimize the handling costs of
containers in those two kinds of storage.
Assumption 3.2.4: e maximum dwell times of the inbound and outbound con-
tainers approximately equal the maximal free storage period, which is beyond
the planning horizon (Zhang etal. 2001). ere are containers with unknown
removal times at the planning period or containers with known departure times
beyond the planning horizon. eir associated workload does not occur in the
planning horizon and consequently such containers cannot be considered in
this storage allocation model. Instead, these containers are distributed to blocks
in proportion to their available storage capacities at the beginning of the plan-
ning horizon so as to balance the block densities in the secondary storage.
Assumption 3.2.5: Within each block, the exact location of a container can be
assigned to shorten the handling time by minimizing reshuing (Zhang
etal. 2001). is decision about storage location is a problem at a lower level,
and is not considered in this formulation.
Assumption 3.2.6: e secondary storage is where the customers bring in their out-
bound containers and the consignees pick up their inbound containers. e out-
bound containers are then transported to the primary storage. Also, it is assumed
the inbound containers are rst stored in the primary storage and then trans-
ported to the secondary storage. We assume that the primary and secondary stor-
age types have enough space to store all the containers over the planning horizon.
In order to make the model, the following parameters are known at the beginning
of a planning horizon:
TP
ij
: e traveling time between block i of the primary storage to block j of the
secondary.
TS
ij
: e traveling time between block i of the secondary storage to block j of
the primary.
T: e total number of time periods in the planning horizon. e time period
has to be greater than the maximum traveling time between the primary stor-
age and the secondary storage or vice versa.
B: e total number of blocks in the secondary storage.
C
i
: e storage capacity of block i of the secondary storage.
Formulations of the Problems and Solutions ◾ 35
P: e total number of blocks in the primary storage.
F
i
: e capacity of block i of the primary storage.
H
i0
: e initial inventory of block i of the primary storage, that is, the number
of containers in primary storage at the beginning of the planning horizon.
S
i0
: e initial inventory of block i in the secondary storage, that is, the number
of containers in block i at the beginning of the planning horizon.
PE0
it
: e expected number of initial SSCPI containers stored in block i of the
secondary storage to be picked up during period t.
L0
it
: e expected number of initial PSCPI containers stored in block i of the
primary storage to be moved to the arriving vessels during period t.
GE
tk
: e expected total number of SSCPS containers that are to be allocated
in the secondary storage during period t and to be moved to primary storage
in period t+k.
DE
tk
: e expected total number of PSCSS containers, allocated in the primary
storage during period t, and to be picked up from the secondary storage in
period t+k.
G
t
: e expected total number of SSCGD containers that arrive at the terminal
during period t and to be stored in the secondary storage.
D
t
: e expected total number of PSCDS containers that arrive to the terminal
during period t by vessels and to be stored in the primary storage.
α
t
: e expected number of SSCGD containers storing in secondary storage
during period t, and to be moved to the primary storage in periods beyond
the current planning horizon.
β
t
: e expected number of PSCDS containers arriving at the terminal during
period t, and to be moved to the secondary storage, with an unknown pickup
time or pickup time beyond the planning horizon.
Q
t
and R
t
: e maximum and minimum number of available QCs, respectively,
to handle PSCSS, SSCPS, PSCPI, and PSCDS containers in the primary
storage during period t.
3.2.2 Decision Variables and Domains
e following decision variables are dened:
X
ijt
: e total number of PSCSS containers in block i of the primary storage to
be moved to block j in the secondary storage during the time period t.
Domain X
ijt
={0, 1, 2, …, Max (F
i,
C
j
)|i=1, 2, … P, j=1, 2, … B}
Y
ijt
: e total number of SSCPS containers in block i of the secondary storage to
be moved to block j in the primary storage during the time period t.
Domain Y
ijt
={0, 1, 2, …, Max (C
i
, F
j
)|i=1, 2, … B, j=1, 2, … P}
GS
it
: e total number of SSCGD containers that arrive at the terminal during
the time period t and to be stored in block i of the secondary storage.
36 ◾ Vehicle Scheduling in Port Automation
Domain GS
it
={0, 1, 2, …, Max (C
i
)|i=1, 2, … B}
DP
it
: e total number of PSCDS containers that arrive to the terminal during
period t by vessels and to be stored in block i of the primary storage.
Domain DP
it
={0, 1, 2, …, Max (F
i
)|i=1, 2, … P}
3.2.3 Constraints
In order to present the constraints of this decision, we introduce the following
auxiliary variables:
PE
it
: e total number of SSCPI containers stored in block i of the secondary
storage that is picked up by consignees during period t. is variable is deter-
mined by the following expression:
PE
it
= X
jit ′
+ PE0
it
, fori = 1,2,… B; for t = 1,2,…,T
j=1
P
∑
t ′=1
t−1
∑
L
it
: e total number of PSCPI containers stored in block i of the primary stor-
age that are to be moved to the arriving vessels during period t. is variable
is determined by the following expression:
L
it
Y
ji
′
t
+ L0
it
, fori = 1,2,…P; for t = 1,2,…,T
j=1
B
∑
t ′=1
t−1
∑
H
it
: e inventory of block i of the primary storage at the beginning of period t.
is variable is determined by the following expression:
H
it
= H
i(t −1)
+ DP
it
+ Y
jit
− X
jit
− L, fort = 1,2,…,T ; for i = 1,2,…, P
j=1
B
∑
j=1
B
∑
e expression represents the updating of the inventory in the primary storage
from a period to the next period. e rst term is the initial inventory of
block i. e second term is the number of PSCDS containers being allo-
cated in block i. e third and fourth terms state the inventory of block i
is increased and decreased by the number of SSCPS and PSCSS containers,
respectively. e last term is the number of PSSPI containers being moved
from block i to the arriving vessels.
S
it
: e inventory of block i of the secondary storage at the beginning of periodt.
is variable is determined by the following expression:
S
it
= S
i(t −1)
+ GS
it
− Y
jit
+ X
jit
− PE
it
, for t = 1,2,…,T ; for i = 1,2,…, B
j=1
P
∑
j=1
P
∑
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.