Chapter 8
Controlling Your Drone
In This Chapter
![]() Understanding how drones are piloted
Understanding how drones are piloted
![]() Controlling your drone
Controlling your drone
![]() Auto-piloting your drone
Auto-piloting your drone
Getting your drone airborne and flying it with great skill requires more than just a deft hand, it requires high technology! The greatest technology innovation to drive the growth of the modern drone market is smartphones. Modern smartphones contain all of the advanced communication protocols that are necessary for drone flight. The Apple iPhone, and numerous Android devices, has a cellular radio which utilizes several long-range and short ranges frequencies. The iPhone also has wireless internet capabilities with Wi-Fi, Bluetooth, and global positioning service (GPS). Your iPhone also contains advanced sensors like temperature gauges, gyroscopes that determine the orientation of the phone, accelerometers that detect motion of the phone and can even detect acceleration. The smartphone industry not only drove the development and improvement of these technologies but also the miniaturization of these technologies.
Small and powerful are the words that should be used to describe the technology needed to get your drone into the sky. In this chapter, you will explore all of the different technologies that control your drone and keep it airborne. Learn how they all work together to give you directional control with a number of different devices like smartphones, tablets, and the tried and true radio controller.
Flying an aerial vehicle that can move in all directions requires advanced navigational skill. This chapter describes the difference in directional controls from heads-free to standard. Get a handle on how to steer your drone like a pro! Last, this chapter explores different advanced flying modes and autopilots that can make it easier for you to capture fantastic video and photos. Some modes are device-specific, and some are universal. Take a look at how you can use these advanced flying modes to make your drone flying experience the best.
Understanding How Your Drone Is Controlled
Hobbyists have been flying remote-controlled aircraft since the 1940s. For the most part, the aircraft have been nothing more than airplanes with motors. The technology needed to get an airplane airborne and to control it remotely is far less complex than what is necessary for a multi-rotor aircraft, which is the popular aircraft of today. There are several reasons for this and it is largely due to the manner in which both aircraft get airborne. For an object that is heavier-than-air to get airborne, you must create lift. Lift is a force that pushes an object upward into the air and is created by varying the air pressure above and below an aircraft.
Airplanes create lift by moving air above and below a wing (and around the plane). The way that air movement is created is with the horizontal movement of the aircraft. Think of airplanes taking off at an airport: the larger the aircraft, the longer the runway they need to gain the right amount of speed to create the lift that will ultimately push the aircraft into the air. Once airborne, the aircraft must maintain horizontal momentum in order to keep the right amount of air moving over the wings. Figure 8-1 shows an aircraft that is airborne. The aircraft moves only in the direction that the nose is pointing. That means that side to side, reverse, and vertical movement are not a possibility for airplanes.

Source: NASA/Tom Tschida
Figure 8-1: Directional control requires constant forward movement.
Helicopters and multi-rotors achieve lift by the same principles as an airplane, only they create lift by drawing air down through their propellers at a high rate of speed. This creates lift on the propellers which push the craft directly upward. With helicopters, directional control is achieved by changing the direction in which the propellers lean, by changing the pitch of the blades. This is called changing the attack of the propellers. Helicopters typically only have one main propeller but multi-rotors have more than one.
The most popular drones available today are multi-rotors with at least three propellers and some have in upwards of eight propellers. Multi-rotors maintain stability by varying the speeds of each propeller. Directional control in a drone is achieved by changing the attack of the propellers, the same as a helicopter, but this change in attack is accomplished by slowing some of the rotors to cause the craft angle to change enough to cause it to move. Figure 8-2 shows the directional capabilities of a multi-rotor aircraft, a style that is common for modern drones. As shown in Figure 8-2, multi-rotor aircraft have the benefit of 3-dimensional movement where as an airplane is limited to planar movement.
Credit: Source: Jorge Stolfi
Figure 8-2: Rotocraft are capable of 3-dimensional movement.
The benefit to flying an airplane over a rotorcraft is that it requires substantially less power, and fuel, to get an airplane in the air. Airplanes can move at faster speeds, over greater distances for longer periods of time than a helicopters.
For a multi-rotor drone, there are two advanced sensors that are required to be able to achieve steady 3-dimensional flight:
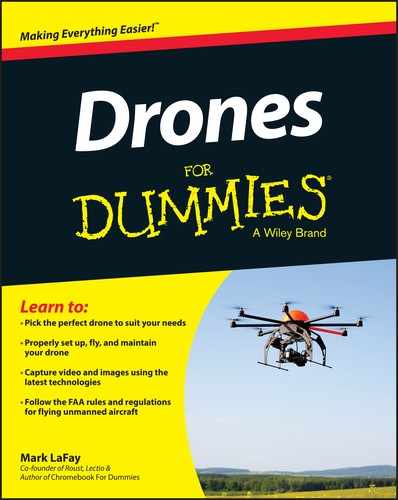
- Accelerometer: These advanced sensors detect linear movement. That means movement in a straight line. There are three axes in a 3D space: X, Y, and Z. Accelerometers detect and measure movement along those axes but not around. This movement is called linear movement. Anything other than linear movement confuses an accelerometer. Figure 8-3 is a picture of linear movement along an axis.
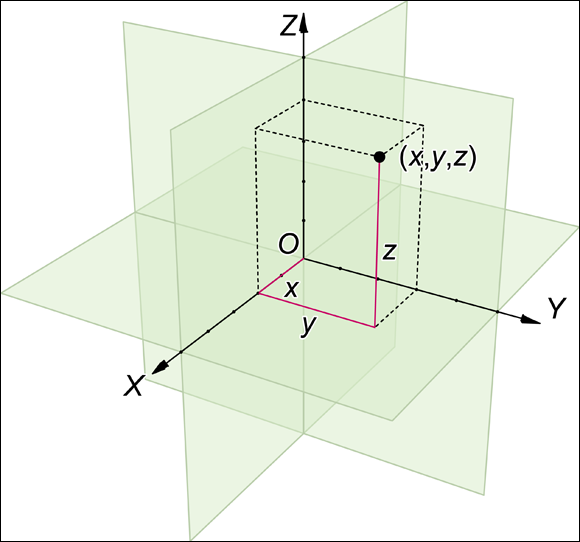
- Gyroscope: This sensor is designed to detect rotational movement. That means movement around a line which, in a 3D space, are the X, Y, and Z axes. Whereas an accelerometer measures motion along the axis, a gyroscope will measure motion around an axis. Figure 8-3 shows an illustration of gyroscopic movement.
Source: LucasVB/Creative Commons
Figure 8-3: 3D movement is detected with gyros and accelerometers.
Gyros, short for “gyroscopes,” and accelerometers are necessary for maintaining stability and flight control. If you can’t detect the orientation of your drone, you won’t be able to maintain flight and then everything will come crashing down.
Radio Frequency
In order to control a drone remotely, you must be able to communicate with it wirelessly. That means you want to be able to send it directional information without needing to be physically connected to the drone by a cable. Since the early days of remote control flying, this wireless navigation was achieved using radio waves. Radio waves are an invisible wave form on the electromagnetic spectrum. Like all things on the electromagnetic spectrum, radio is measured in hertz (Hz). Extremely low frequency is anywhere from 3Hz to 30Hz and tremendously high frequency is 300 GHz – 3000GHz.
A great example of radio frequency (RF) communication is a common audio radio. Audible content is transmitted wirelessly over long distances using radio transmitting towers. Your radio receiver then picks up the waves and translates them into the audio that comes out of the speakers. FM radio is between 90MHz and 110MHz. For radio to work, you must have a transmitter to send the messages and a receiver to get the messages. At a rudimentary level, this is how remotely controlling an aircraft is accomplished. More precisely, your transmitter and receiver need to be tuned to the same frequency; otherwise, they won’t be able to connect and send directional information.
Here is where it might get a little confusing. Radio frequency is just a method for communicating. There are billions of devices around the globe that communicate using wireless communication in the RF segment of the electromagnetic spectrum. These radio transmissions are always present everywhere you go in the world. You just have to have a receiver that is capable of fine-tuning to the correct frequency to receive it. To avoid situations such as your drone being controlled by someone else’s remote control, devices use a unique identification code to identify a transmission on one particular radio frequency as the transmission it wants to receive. To do this, transmitters and receivers are paired using an RFID or a “radio frequency identification.” All information broadcast over RFID is prefixed with an RFID so that the receiver knows that the information it is picking up is for it.
Lower frequencies tend to have a much greater range at lower power than higher frequency devices. Lower frequencies also have a greater ability to penetrate dense objects which is another reason why they are great for remote controlling a drone. However, the lower the frequency, the larger the antenna must be to receive the frequency. Most remote control drones use 900 MHz for transmission. Higher frequencies in the 2.4 GHz range are predominantly used for Wi-Fi, which you will learn about below. Figure 8-4 is a picture of the RF controller that the DJI Phantom 2 uses.

Source: Vicki Burton/Creative Commons
Figure 8-4: The DJI Phantom 2 remote control uses RF.
Wi-Fi Controls
The Wi-Fi alliance says that Wi-Fi is any “wireless local area network” product based on the Institute of Electrical and Electronics Engineers (IEEE) standard 802.11. Today, Wi-Fi is used universally to mean a wireless means to connect to the Internet. Wi-Fi used to only be available on computers but as the technology evolved, shrunk, and grew more intelligent, it was integrated into portable devices like phones and tablets. Now there are several million products around the world that are Wi-Fi-enabled so that they can be remotely accessible.
Most drones today are Wi-Fi enabled so that they can broadcast video to a computer, tablet, or smartphone. Some drones also use Wi-Fi for remote controlling through a tablet or mobile application. The Parrot AR Drone 2.0 offers high-end interactive controls with their mobile application that runs on an iPhone or iPad. Figure 8-5 is a picture of the Parrot AR Drone 2.0 tablet controls.
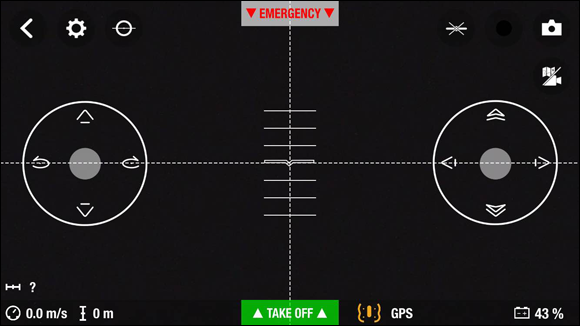
Figure 8-5: Remotely control the Parrot AR Drone 2.0 using Wi-Fi and a mobile app.
While there are clear benefits to using Wi-Fi to control your drone or simply communicate information back from your drone like environmental data, video, or photos, Wi-Fi works on an ultra high radio frequency which means that its range is limited to about 600 meters.
GPS
Global positioning technology has shrunk down enough that it is possible to ping satellites for location data from devices as small as a smartphone and your drone. GPS is primarily only used to communicate location back to a mobile app. GPS is also used for pre-programming routes. For example the DJI Phantom 2 gives you the ability to program a route with several GPS coordinates. Once programmed, the drone can be cut loose and it will fly in sequence to each of the GPS locations identified. Figure 8-6 is a picture of the DJI interactive map where a user can specify a flight route with GPS coordinates.

Courtesy of Andrew Amato
Figure 8-6: Plot a route with GPS and then set it and forget it!
Directional Control
Becoming an expert level drone pilot requires a little extra flight training. By design, multi-rotor aircraft have great navigational control, but that control takes time to master. Airplanes, unlike multi-rotor aircraft, can only fly nose forward which means that if you want to go a particular direction, you need to steer that direction much like you would in a boat. Quadcopters, however, have the ability to go forward and backward, move left and right, and move vertically. Directional control is achieved by adjusting the roll, pitch, yaw, and throttle of your quadcopter.
- Roll: Tilts your quadcopter to the left or the right by speeding up the rotors on one side of your quadcopter and slowing them down on the other side. By doing so, one side of the drone will sag, or tilt downward, causing the drone to strafe to the left or the right.
- Pitch: Tilts your quadcopter forward and backward in the same manner as rolling. By adjusting the pitch, your drone will sag down in the front causing it to go forward, or sag in the back causing it to go backwards.
- Yaw: Rotates the nose of your aircraft left to right. Quadcopter propellers do not tall spin in the same direction. If they did, the centrifugal force would cause them to just spin out of control. In order to combat that, diagonally opposing propellers spin in the same direction. Figure 8-7 is a picture detailing the directions in which propellers spin. To rotate your quadcopter the rotors that spin in the same direction will speed up to rotate the air craft to the left or the right.
- Throttle: Controls the motion of your drone up and down by speeding up or slowing down all of the propellers.

Source: Grabriel Hoffmann/ Creative Commons.
Figure 8-7: Propellers do not all spin the same direction.
Standard Mode
There are several different names and terms to refer to the different flight modes for your drone. Standard mode, also known as Normal mode (and other names), is the most common flight mode. And probably the safest for new pilots. To put it simply, standard mode controls function as if you were sitting in the cockpit piloting the control. The controls are relative to the front of the drone. Inexperienced pilots can get into trouble in this mode because when the drone is facing the pilot, the controls can seem to be reversed. Just remind yourself that you are always flying from the perspective of being in the pilot seat.
Heads Free Mode
When your drone is in Heads Free mode, also known as Simple mode or Carefree mode, your controls are set based on the orientation of the drone when it was armed. For example, if your drone was facing north and you were standing behind it, forward will always send it north, backward will always send it south; the same goes for the side to sides. This can be somewhat confusing, but it can come in handy in the event your drone is ever far enough away that you can’t determine the direction it is pointing (heading).
First Person View
First person view (FPV) is a new flight mode for consumer drone fliers. In FPV mode, the pilot is able to fly using the onboard cameras acting as his eyes. The camera is typically a narrow focus, front-facing camera, giving the pilot the ability to pilot the craft as if he were onboard and behind the controls. In order to fly in FPV mode, your drone must come with a front-facing camera. Your drone must also have the option for live streaming the video feed to a display device. This almost always requires a Wi-Fi connection which then places a restriction on the distance you can fly in FPV mode to about 600 meters or less.
The FAA hasn’t placed an official ban on FPV flying, but the law specifically says that if you are hobby flying, you must fly line-of-sight. That said, if your drone offers FPV flight mode and you want to limit your risk of potentially getting busted, you should fly out in the middle of nowhere. Figure 8-8 shows the view from a DJI drone with a FPV control setup.

Source: Daniel Zimmermann/Creative Commons
Figure 8-8: First person view is a fun flight mode.
Other Flight Modes and Autopilots
There are several different modes in which you can fly your drone aside from the more common modes like standard and heads free. Unfortunately, there isn’t a standard set of terms for how to describe the different modes, and so one vendor may call it one thing and another vendor will call it something totally different. For example, GPS lock mode is also referred to as loiter mode. Following is a list of other flight modes and some autopilot modes
- Altitude Hold mode: In this mode, your drone’s current altitude will be maintained. Roll, pitch, and yaw will operate the same, but the altitude will remain constant.
- Loiter mode: In this mode, your drone will automatically maintain your location, heading (where you are headed), and altitude even after your hands have been taken off the control sticks. The pilot can fly loiter mode as if it is in a manual mode, but you don’t have to worry about a crash if you take your fingers off the sticks mistakenly.
- Stabilize mode: This mode allows you to fly your drone manually. The drone will automatically level out after you make directional corrections, however. When you roll or pitch a drone, it causes the drone to lean the device in order to move in that direction. In a fully manual mode, you would have to level out the pitch or roll manually. Stabilize mode does this automatically.
- Auto Return mode: Numerous drones offer a feature that will cause your drone to fly back to the place where it was armed in the event that control communication is lost. This feature is usually initialized by default, but refer to your manual to ensure that it is; otherwise, you could lose your drone if you get out of range or lose battery power in your controller.