Integer mathematics
Abstract
This chapter explains addition, subtraction, multiplication and division methods for integers using complement arithmetic. Efficient methods for multiplication and division by constants are presented. The chapter also discusses an ADT for performing these basic operations on arbitrarily large integers.
Keywords
Subtraction; Addition; Binary multiplication; Binary division; Multiplication; Division; Big integer ADT
There are some differences between the way calculations are performed in a computer versus the way most of us were taught as children. The first difference is that calculations are performed in binary instead of base ten. Another difference is that the computer is limited to a fixed number of binary digits, which raises the possibility of having a result that is too large to fit in the number of bits available. This occurrence is referred to as overflow. The third difference is that subtraction is performed using complement addition.
Addition in base b is very similar to base ten addition, except that the result of each column is limited to ![]() . For example, binary addition works exactly the same as decimal addition, except that the result of each column is limited to 0 or 1. The following figure shows an addition in base ten and the equivalent addition in base two.
. For example, binary addition works exactly the same as decimal addition, except that the result of each column is limited to 0 or 1. The following figure shows an addition in base ten and the equivalent addition in base two.
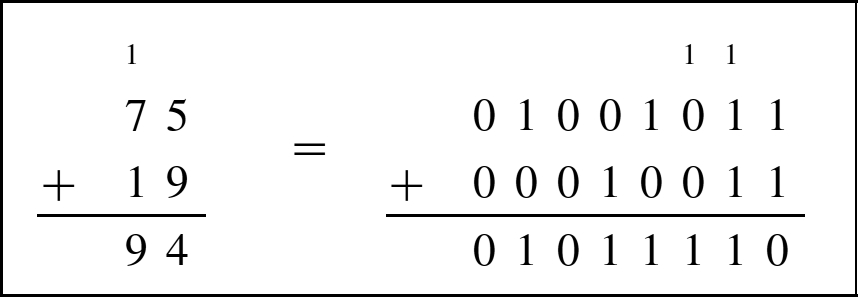
The carry from one column to the next is shown as a small number above the column that it is being carried into. Note that carries from one column to the next are done the same way in either base. The only difference is that there are more columns in the base two addition because it takes more binary digits to represent a number than it does in decimal.
7.1 Subtraction by addition
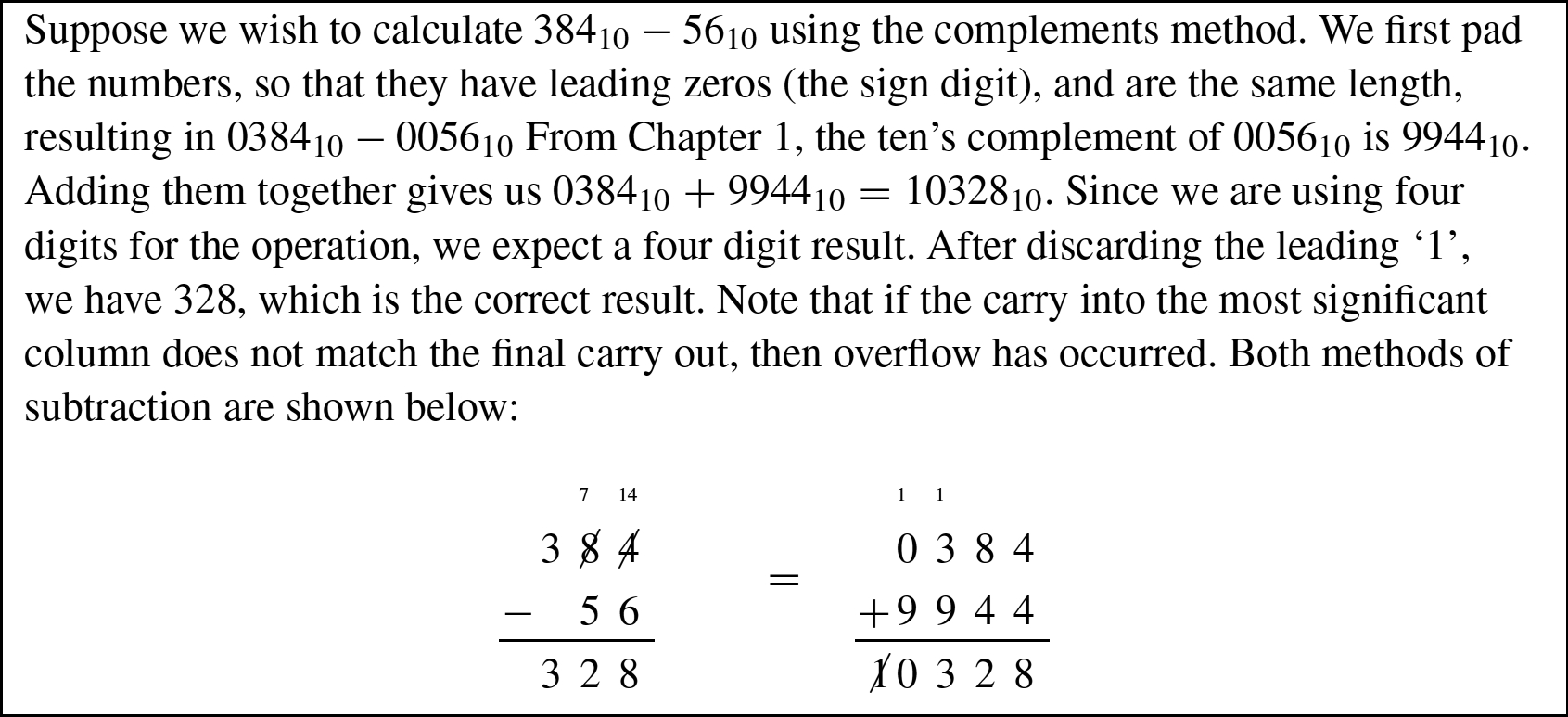
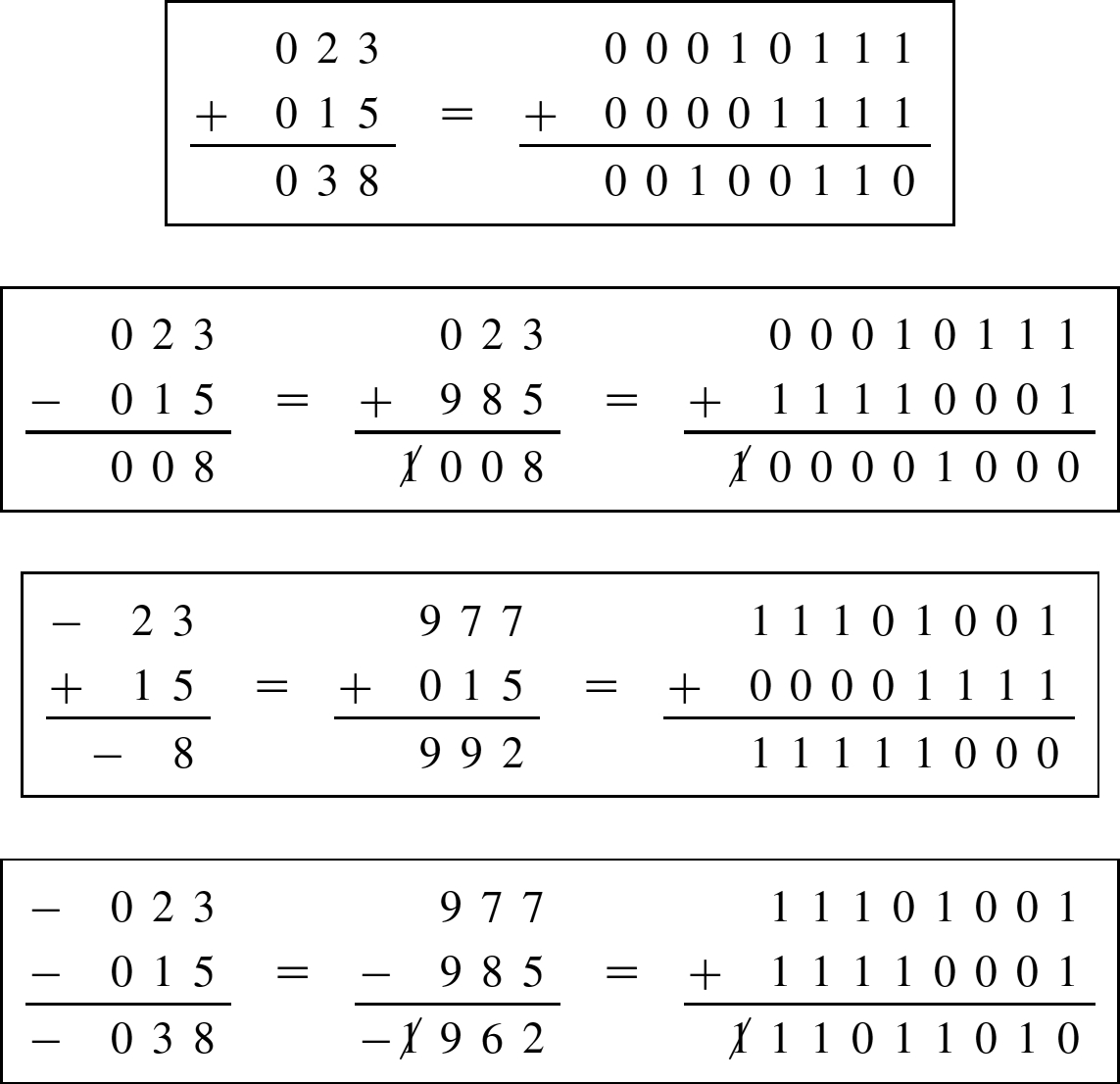
Finding the complement was explained in Section 1.3.3.3. Subtraction can be computed by adding the radix complement of the subtrahend to the menuend. Example 11 shows a complement subtraction with positive results. When the menuend is less than the subtrahend, the result will be negative. In the complement method, we deal with this possibility by adding a sign digit at the beginning of the numbers. Example 12 shows complement subtraction with negative results. Example 13 shows several more signed addition and subtraction operations in base ten and binary.
Example 11
Ten's complement subtraction.
Example 12
Ten's complement subtraction with a negative result.
Suppose we want to calculate ![]() . First, we pad with leading zeros (sign digits), to get
. First, we pad with leading zeros (sign digits), to get ![]() . Then, we take the tens complement of 0481, which is 9519. Adding the ten's complement of the subtrahend to the menuend gives
. Then, we take the tens complement of 0481, which is 9519. Adding the ten's complement of the subtrahend to the menuend gives ![]() . The First digit is greater than 4, indicating that the result is negative. Therefore, we take the ten's complement of the result to get −0197.
. The First digit is greater than 4, indicating that the result is negative. Therefore, we take the ten's complement of the result to get −0197.
Example 13
Signed addition and subtraction in decimal and binary.
7.2 Binary multiplication
Many processors have hardware multiply instructions. However hardware multipliers require a large number of transistors, and consume significant power. Processors designed for extremely low power consumption or very small size usually do not implement a multiply instruction, or only provide multiply instructions that are limited to a small number of bits. On these systems, the programmer must implement multiplication using basic data processing instructions. Even when a hardware multiplier is available, there are some techniques available which may achieve higher performance.
7.2.1 Multiplication by a power of two
If the multiplier is a power of two, then multiplication can be accomplished with a shift to the left. Consider the four bit binary number ![]() , where
, where ![]() denotes bit n of x. If x is shifted left by one bit, introducing a zero into the least significant bit, then it becomes
denotes bit n of x. If x is shifted left by one bit, introducing a zero into the least significant bit, then it becomes ![]() . Therefore, a shift of one bit to the left is equivalent to multiplication by two. This argument can be extended to prove that a shift left by n bits is equivalent to multiplication by
. Therefore, a shift of one bit to the left is equivalent to multiplication by two. This argument can be extended to prove that a shift left by n bits is equivalent to multiplication by ![]() .
.
7.2.2 Multiplication of two variables
Most techniques for binary multiplication involve computing a set of partial products and then summing the partial products together. This process is similar to the method taught to primary schoolchildren for conducting long multiplication on base ten integers, but has been modified here for application to binary. The method typically taught in school for multiplying decimal numbers is based on calculating partial products, shifting them to the left and then adding them together. The most difficult part is to obtain the partial products, as that involves multiplying a long number by one base ten digit. The following example shows how the partial products are formed.
| 1 | 2 | 3 | ||||||
| × | 4 | 5 | 6 | |||||
| 7 | 3 | 8 | (this is 123 x 6) | |||||
| 6 | 1 | 5 | 0 | (this is 123 x 5, shifted one position to the left) | ||||
| + | 4 | 9 | 2 | 0 | 0 | (this is 123 x 4, shifted two positions to the left) | ||
| 5 | 6 | 0 | 8 | 8 |

The first partial product can be written as ![]() = 738. The second is
= 738. The second is ![]() , and the third is
, and the third is ![]() . In practice, we usually leave out the trailing zeros. The procedure is the same in binary, but is simpler because the partial product involves multiplying a long number by a single base 2 digit. Since the multiplier is always either zero or one, the partial product is very easy to compute. The product of multiplying any binary number x by a single binary digit is always either 0 or x. Therefore, the multiplication of two binary numbers comes down to shifting the multiplicand left appropriately for each non-zero bit in the multiplier, and then adding the shifted numbers together.
. In practice, we usually leave out the trailing zeros. The procedure is the same in binary, but is simpler because the partial product involves multiplying a long number by a single base 2 digit. Since the multiplier is always either zero or one, the partial product is very easy to compute. The product of multiplying any binary number x by a single binary digit is always either 0 or x. Therefore, the multiplication of two binary numbers comes down to shifting the multiplicand left appropriately for each non-zero bit in the multiplier, and then adding the shifted numbers together.
Suppose we wish to multiply two four-bit numbers, 1011 and 1010:
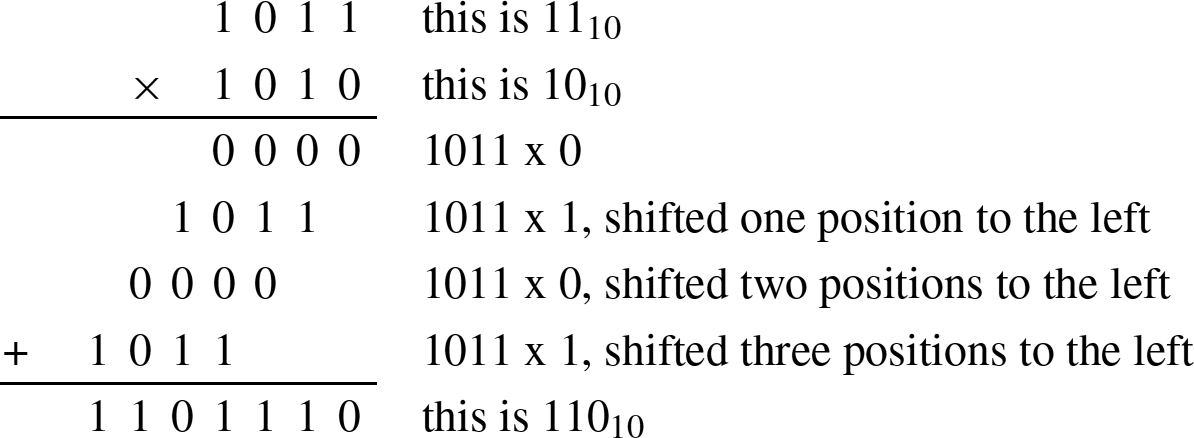
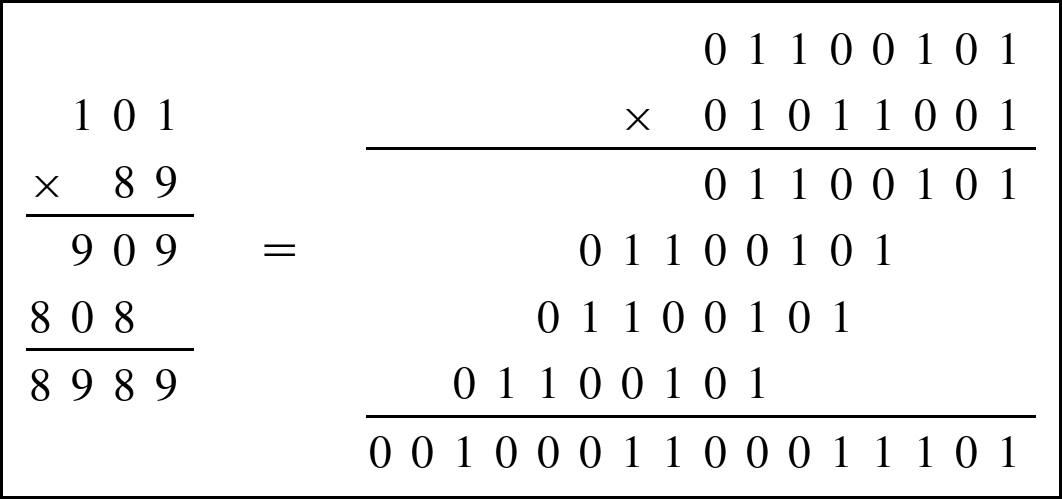
Notice in the previous example that each partial sum is either zero or x shifted by some amount. A slightly quicker way to perform the multiplication is to leave out any partial sum which is zero. Example 14 shows the results of multiplying 10110 by 8910 in decimal and binary using this shorter method. For implementation in hardware and software, it is easier to accumulate the partial products, by adding each to a running sum, rather than building a circuit to add multiple binary numbers at once. This results in an algorithm with ![]() complexity, where n is the number of bits in the multiplier. There are multiplication algorithms that give even better performance, an some processors use combinatorial multiplication circuits, which are very fast, but require a large number of transistors and consume a great deal of power.
complexity, where n is the number of bits in the multiplier. There are multiplication algorithms that give even better performance, an some processors use combinatorial multiplication circuits, which are very fast, but require a large number of transistors and consume a great deal of power.
Example 14
Equivalent multiplication in decimal and binary.
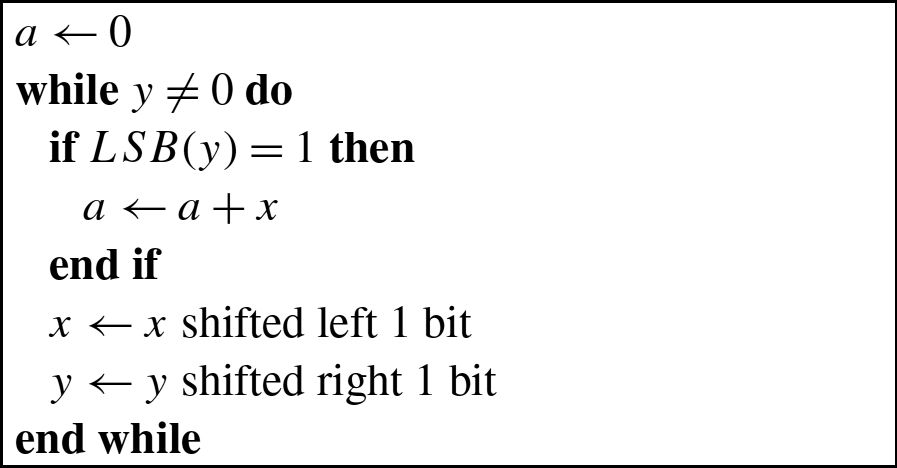
Binary multiplication can be implemented as a sequence of shift and add instructions. Given two registers, x and y, and an accumulator register a, the product of x and y can be computed using Algorithm 1. When applying the algorithm, it is important to remember that, in the general case, the result of multiplying an n bit number by an m bit number is (at most) an ![]() bit number. For instance
bit number. For instance ![]() . Therefore, when applying Algorithm 1, it is necessary to know the number of bits in x and y. Since x is shifted left on each iteration of the loop, the registers used to store x and a must both be at least as large as the number of bits in x plus the number of bits in y.
. Therefore, when applying Algorithm 1, it is necessary to know the number of bits in x and y. Since x is shifted left on each iteration of the loop, the registers used to store x and a must both be at least as large as the number of bits in x plus the number of bits in y.
To multiply two n bit numbers, you must be able to add two 2n bit numbers. Adding 128 bit numbers requires two add instructions and the carry from the least-significant 64 bits must be added to the sum of the most-significant 64 bits. AArch64 provides a convenient way to perform the add with carry. Assume we have two 128 bit numbers, x and y. We have x in ![]() ,
, ![]() and y in
and y in ![]() ,
, ![]() , where the high order words of each number are in the higher-numbered registers, and we want to calculate
, where the high order words of each number are in the higher-numbered registers, and we want to calculate ![]() . Listing 7.1 shows a two instruction sequence for an AArch64 processor. The first instruction adds the two least-significant words together and sets (or clears) the carry bit and other flags in the
. Listing 7.1 shows a two instruction sequence for an AArch64 processor. The first instruction adds the two least-significant words together and sets (or clears) the carry bit and other flags in the ![]() register. The second instruction adds the two most significant words along with the carry bit. This technique can be extended to add integers with any number of bits.
register. The second instruction adds the two most significant words along with the carry bit. This technique can be extended to add integers with any number of bits.

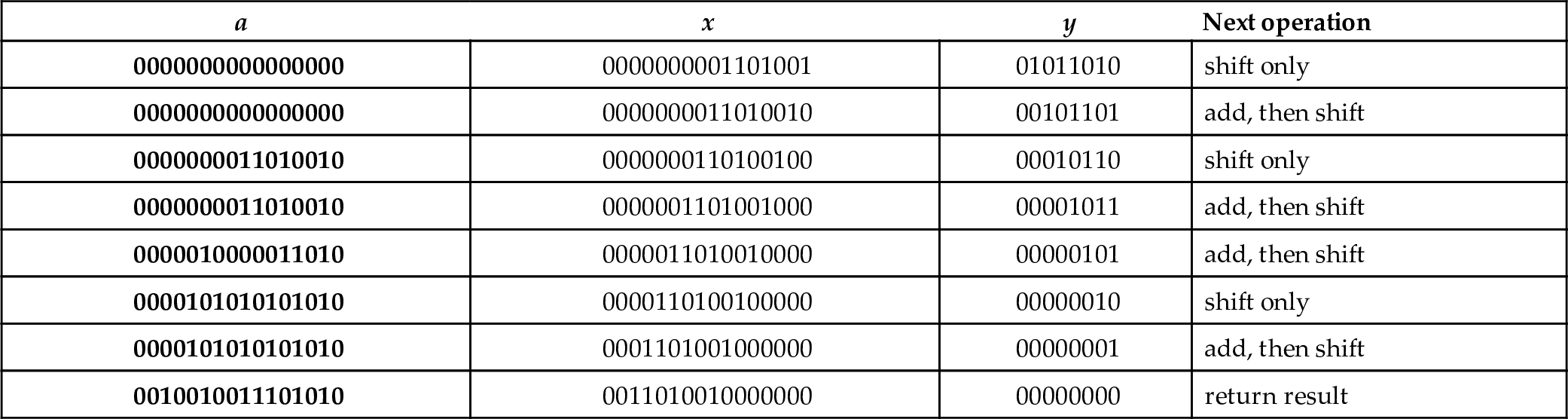
Example 15
Binary multiplication using Algorithm 1.
Assume we wish to multiply two numbers, ![]() and
and ![]() . Applying Algorithm 1 results in the following sequence:
. Applying Algorithm 1 results in the following sequence:
| a | x | y | Next operation |
|---|---|---|---|
| 0000000000000000 | 0000000001101001 | 01011010 | shift only |
| 0000000000000000 | 0000000011010010 | 00101101 | add, then shift |
| 0000000011010010 | 0000000110100100 | 00010110 | shift only |
| 0000000011010010 | 0000001101001000 | 00001011 | add, then shift |
| 0000010000011010 | 0000011010010000 | 00000101 | add, then shift |
| 0000101010101010 | 0000110100100000 | 00000010 | shift only |
| 0000101010101010 | 0001101001000000 | 00000001 | add, then shift |
| 0010010011101010 | 0011010010000000 | 00000000 | return result |
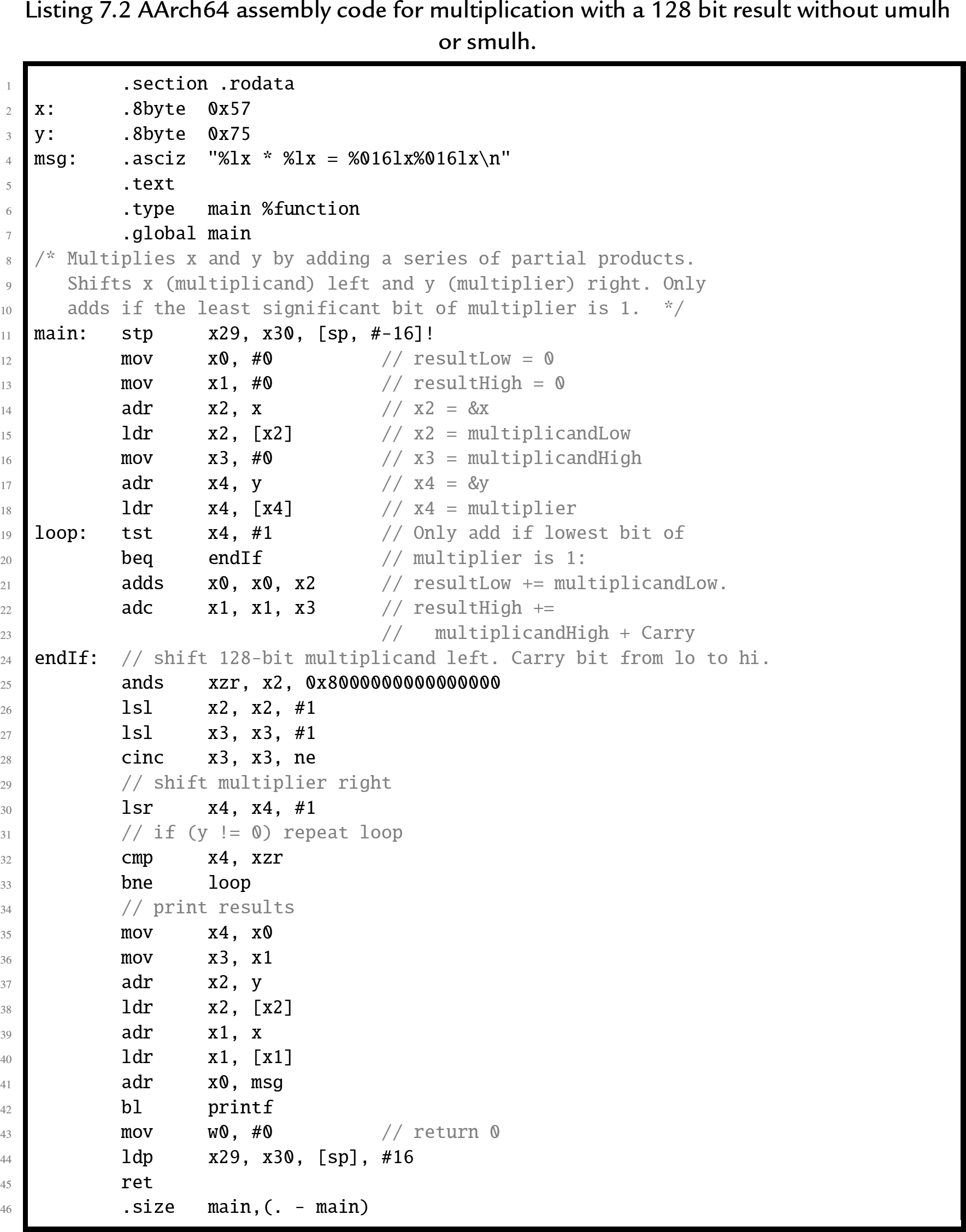
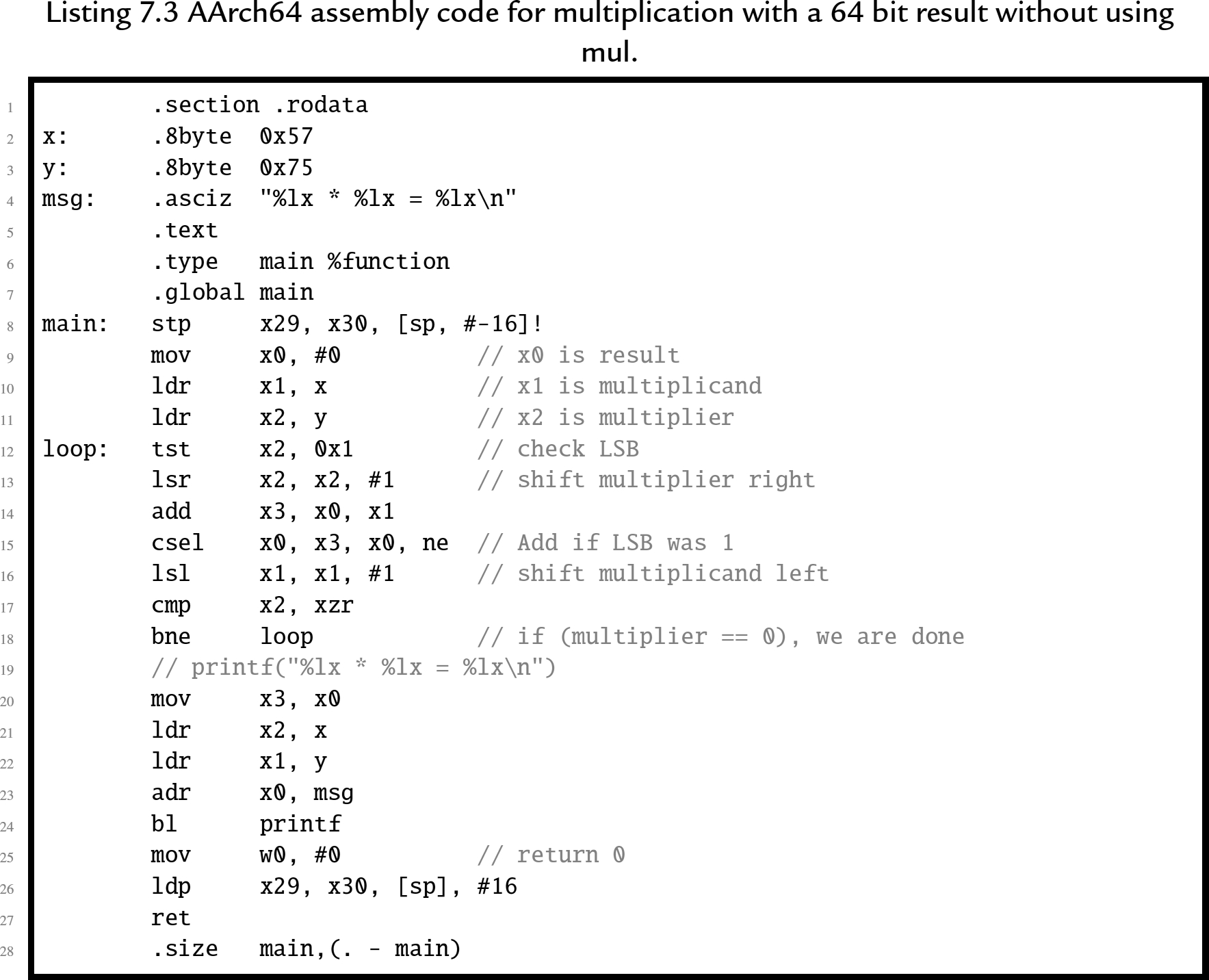
On an AArch64 processor, the algorithm to multiply two 64-bit unsigned integers is very efficient. Listing 7.2 shows one possible algorithm for multiplying two 64-bit numbers to obtain a 128-bit result. The code is a straightforward implementation of the algorithm, and some modifications can be made to improve efficiency. For example, if we only want a 64-bit result, we do not need to perform 128-bit addition. This significantly simplifies the code, as shown in Listing 7.3.
7.2.3 Signed multiplication
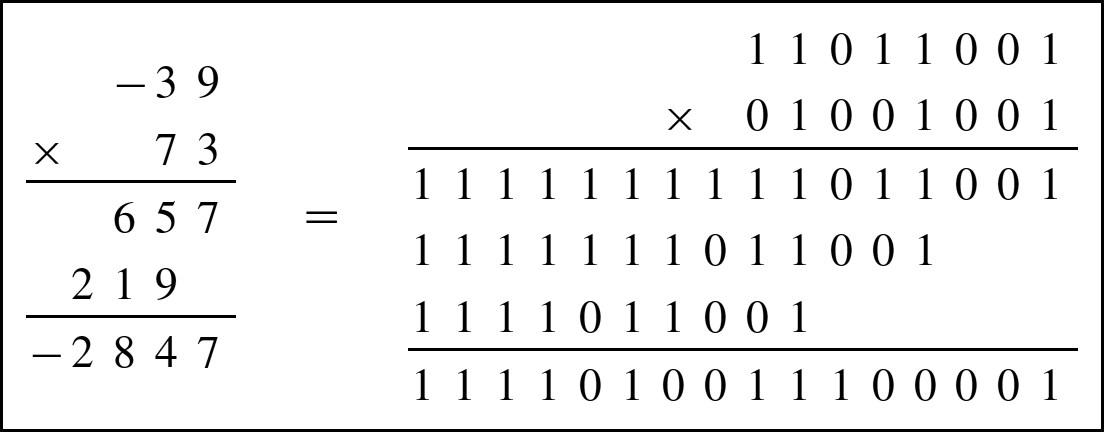
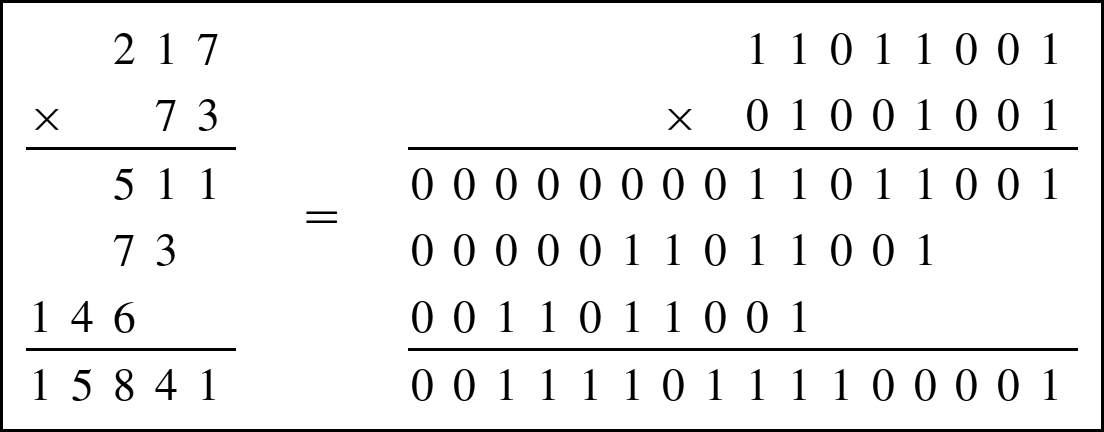
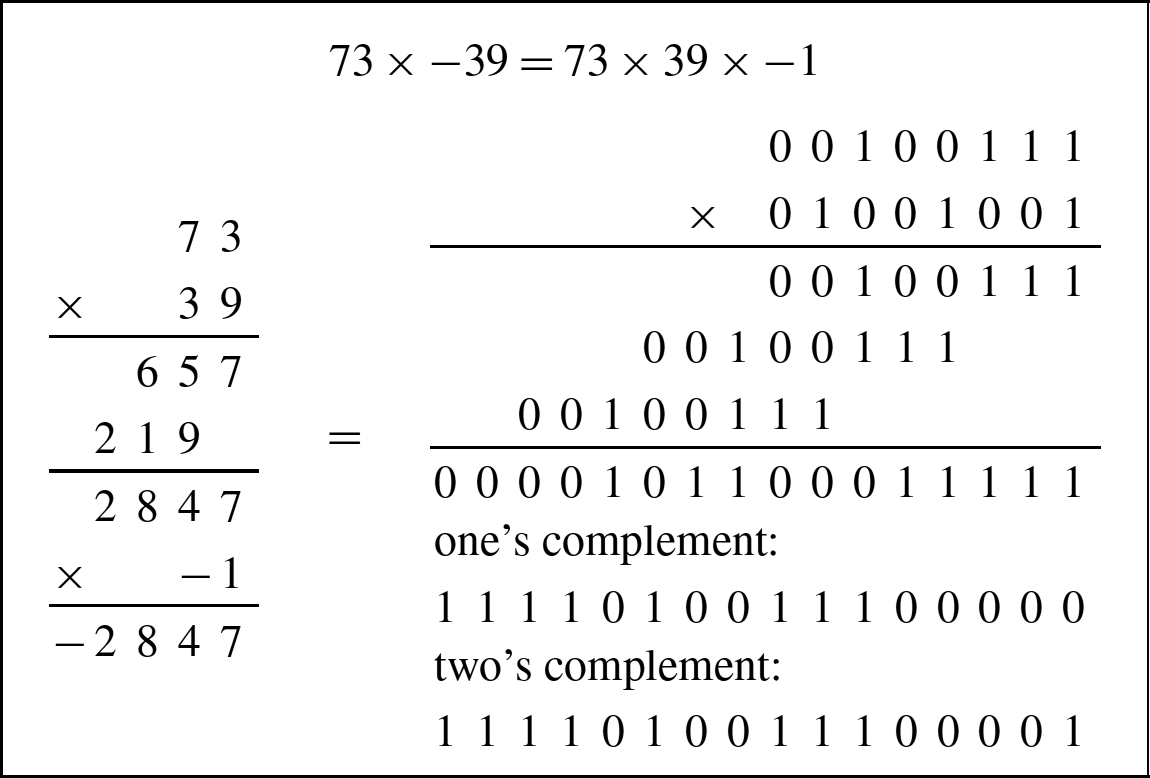
Consider the two multiplication problems shown in Fig. 7.1 and Fig. 7.2. Note that the result of a multiply depends on whether the numbers are interpreted as unsigned numbers or signed numbers. For this reason, most computer CPU's have two different multiply operations for signed and unsigned numbers.
If the CPU provides only an unsigned multiply, then a signed multiply can be accomplished by using the unsigned multiply operation along with a conditional complement. The following procedure can be used to implement signed multiplication.
- 1. if the multiplier is negative, take the two's complement,
- 2. if the multiplicand is negative, take the two's complement,
- 3. perform unsigned multiply, and
- 4. if the multiplier or multiplicand was negative (but not both), then take two's complement of the result.
Example 16
Signed multiplication using unsigned math.
7.2.4 Multiplication of a variable by a constant
If x or y is a small constant, then we don't need the loop. We can directly translate the multiplication into a sequence of shift and add operations. This will result in much more efficient code than the general algorithm. For small constants, this method is often faster than using a hardware multiply instruction. If we inspect the constant multiplier, we can usually find a pattern to exploit that will save a few instructions. For example, suppose we want to multiply a variable x by 1010. The multiplier ![]() , so we only need to add x shifted left 1 bit to x shifted left 3 bits as shown below:
, so we only need to add x shifted left 1 bit to x shifted left 3 bits as shown below:

Now suppose we want to multiply a number x by 1110. The multiplier ![]() , so we will add x to x shifted left one bit plus x shifted left 3 bits as in the following:
, so we will add x to x shifted left one bit plus x shifted left 3 bits as in the following:

If we wish to multiply a number x by 100010, we note that ![]() . It looks like we need 1 shift plus 5 add/shift operations, or 6 add/shift operations. With a little thought, we can reduce the number of operations, as shown below:
. It looks like we need 1 shift plus 5 add/shift operations, or 6 add/shift operations. With a little thought, we can reduce the number of operations, as shown below:
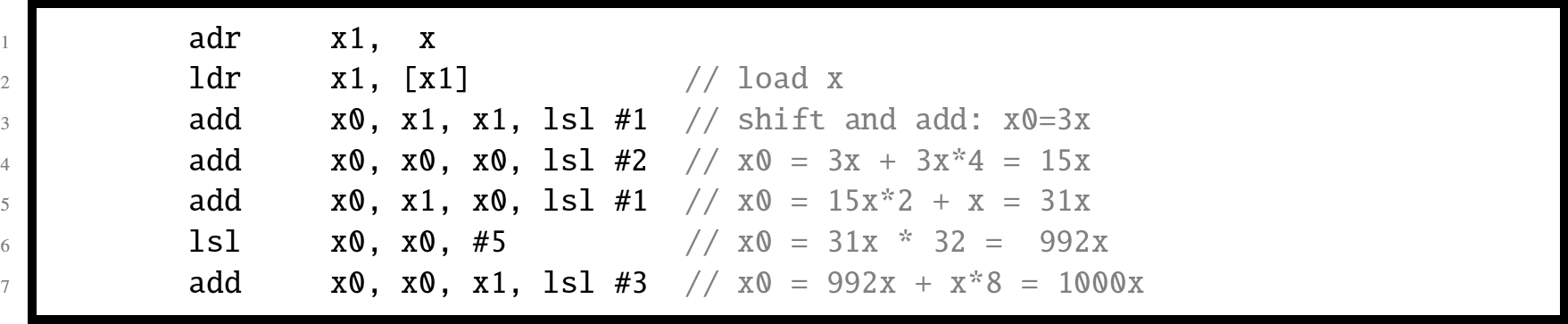
Applying the basic multiplication algorithm to multiply a number x by 25510 would result in seven add/shift operations, but we can do it with only three operations and use only one register, as shown below:

Most modern systems have assembly language instructions for multiplication. However, on most processors, it is often more efficient to use the shift, add, and subtract operations when multiplying by a small constant. The AArch64 processors have a particularly powerful hardware multiplier. They can typically perform multiplication with a 64-bit result in one clock cycle. The long multiply instructions take between three and five clock cycles, depending on the size of the operands. Using the multiply instruction on an AArch64 processor to multiply by a constant requires loading the constant into a register before performing the multiply. Therefore, if the multiplication can be performed using two or fewer shift, add, and/or subtract instructions, then it will be equal to or better than using the multiply instruction.
7.2.5 Multiplying large numbers
Consider the method used for multiplying two digit numbers in base ten, using only the one-digit multiplication tables. Fig. 7.3 shows how a two digit number ![]() is multiplied by another two digit number
is multiplied by another two digit number ![]() to produce a four digit result using basic multiplication operations which only take one digit from a and one digit from b at each step.
to produce a four digit result using basic multiplication operations which only take one digit from a and one digit from b at each step.
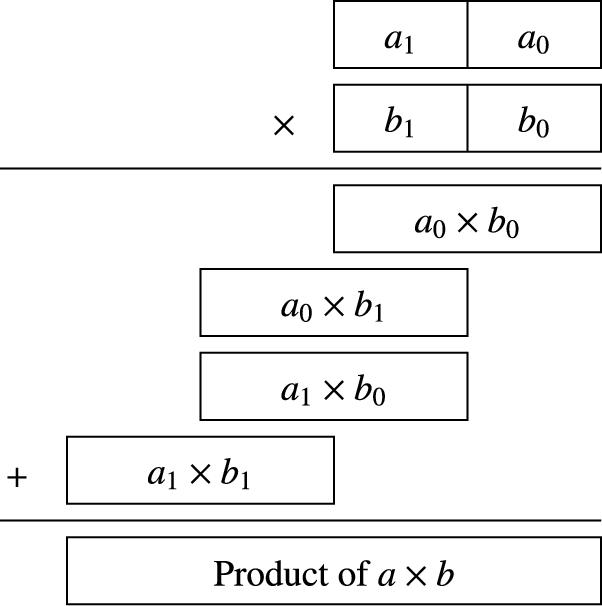
This technique can be used for numbers in any base and for any number of digits. Recall that one hexadecimal digit is equivalent to exactly four binary digits. If a and b are both eight-bit numbers, then they are also two-digit hexadecimal numbers. In other words eight bit numbers can be divided into groups of four bits, each representing one digit in base sixteen. Given a multiply operation that is capable of producing an eight-bit result from two four-bit inputs, the technique shown above can then be used to multiply two eight-bit numbers using only four-bit multiplication operations.
Carrying this one step further, suppose we are given two sixteen-bit numbers, but our computer only supports multiplying eight bits at a time and producing a sixteen bit result. We can consider each sixteen bit number to be a two digit number in base 256, and use the above technique to perform four eight bit multiplies with 16-bit results, then shift and add the 16-bit results to obtain the final 32-bit result. This technique can be extended to perform multiplication with any number of bits, even with limited hardware multiplication instructions.
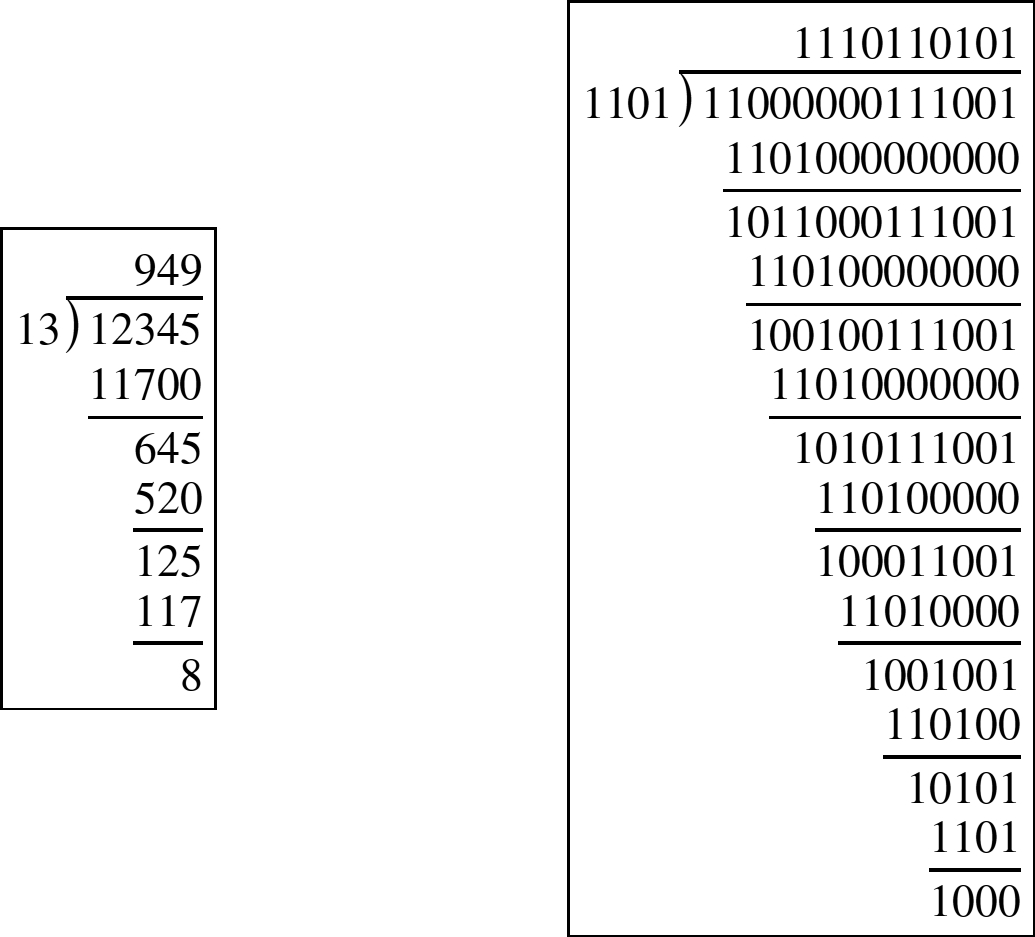
7.3 Binary division
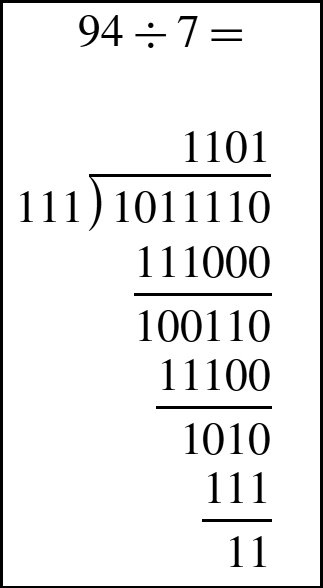
Binary division can be implemented as a sequence of shift and subtract operations. When performing binary division by hand, it is convenient to perform the operation in a manner very similar to the way that decimal division is performed. As shown in Fig. 7.4, the operation is identical, but takes more steps in binary.
7.3.1 Division by a power of two
If the divisor is a power of two, then division can be accomplished with a shift to the right. Using the same approach as was used in Section 7.2.1, it can be shown that a shift right by n bits is equivalent to division by ![]() . However, care must be taken to ensure that an arithmetic shift is used if the dividend is a signed two's complement number, and a logical shift is used if the dividend is unsigned.
. However, care must be taken to ensure that an arithmetic shift is used if the dividend is a signed two's complement number, and a logical shift is used if the dividend is unsigned.
7.3.2 Division by a variable
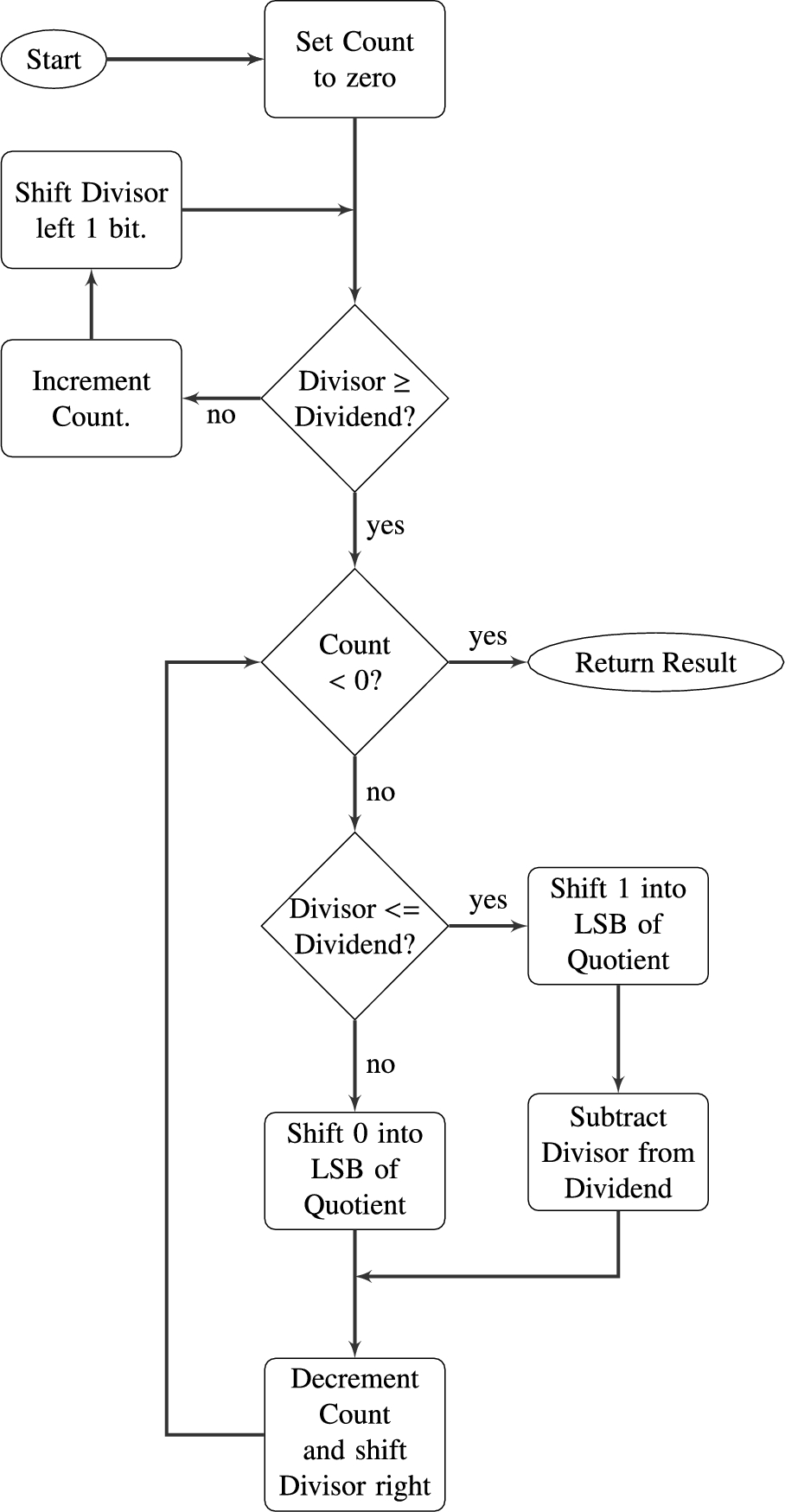
The algorithm for dividing binary numbers is somewhat more complicated than the algorithm for multiplication. The algorithm consists of two main phases: The first phase is to shift the divisor left until it is greater than the dividend, and count the number of shifts. The second phase is to repeatedly shift the divisor back to the right and subtract whenever possible. Fig. 7.5 shows the algorithm in more detail. Before we introduce the AArch64 code, we will take some time to step through the algorithm using an example. Let us begin by dividing 94 by 7. The result is shown below:
To implement the algorithm, we need three registers, one for the dividend, one for the divisor, and one for a counter. The dividend and divisor are loaded into their registers and the counter is initialized to zero as shown below:
| Dividend: | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 0 |
| Divisor: | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 |
| Counter: | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |

Next, the divisor is shifted left and the counter incremented repeatedly until the divisor is greater than the dividend. This is shown in the following sequence:
| Dividend: | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 0 |
| Divisor: | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 0 |
| Counter: | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |

| Dividend: | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 0 |
| Divisor: | 0 | 0 | 0 | 1 | 1 | 1 | 0 | 0 |
| Counter: | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |

| Dividend: | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 0 |
| Divisor: | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 |
| Counter: | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 |

| Dividend: | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 0 |
| Divisor: | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 |
| Counter: | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 |

Next, we allocate a register for the quotient and initialize it to zero. Then, according to the algorithm, we repeatedly subtract if possible, shift to the right, and decrement the counter. This sequence continues until the counter becomes negative. For our example this results in the following sequence:
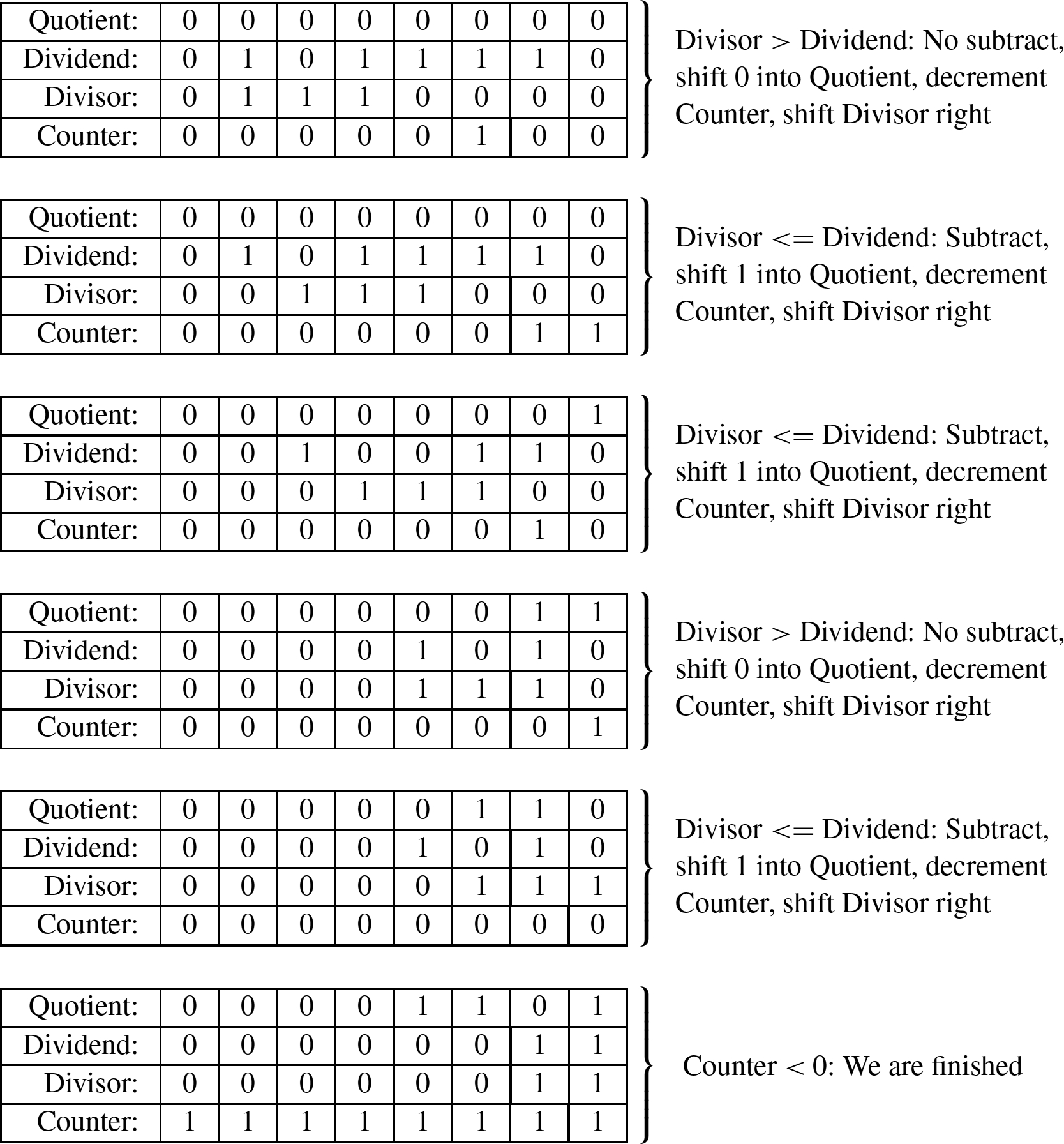
When the algorithm terminates, the quotient register contains the result of the division, and the modulus (remainder) is in the dividend register. Thus, one algorithm is used to compute both the quotient and the modulus at the same time. There are variations on this algorithm. For example, on variation is to shift a single bit left in a register, rather than incrementing a count. This variation has the same two phases as the previous algorithm, but counts in powers of two rather than by ones. The following sequence shows what occurs after each iteration of the first loop in the algorithm.
| Dividend: | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 0 |
| Divisor: | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 |
| Power: | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |

| Dividend: | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 0 |
| Divisor: | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 0 |
| Power: | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |

| Dividend: | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 0 |
| Divisor: | 0 | 0 | 0 | 1 | 1 | 1 | 0 | 0 |
| Power: | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 |

| Dividend: | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 0 |
| Divisor: | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 |
| Power: | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 |

| Dividend: | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 0 |
| Divisor: | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 |
| Power: | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 |

The divisor is greater than the dividend, so the algorithm proceeds to the second phase. In this phase, if the divisor is less than or equal to the dividend, then the power register is added to the quotient and the divisor is subtracted from the dividend. Then, the power and Divisor registers are shifted to the right. The process is repeated until the power register is zero. The following sequence shows what will be in the registers at the end of each iteration of the second loop.
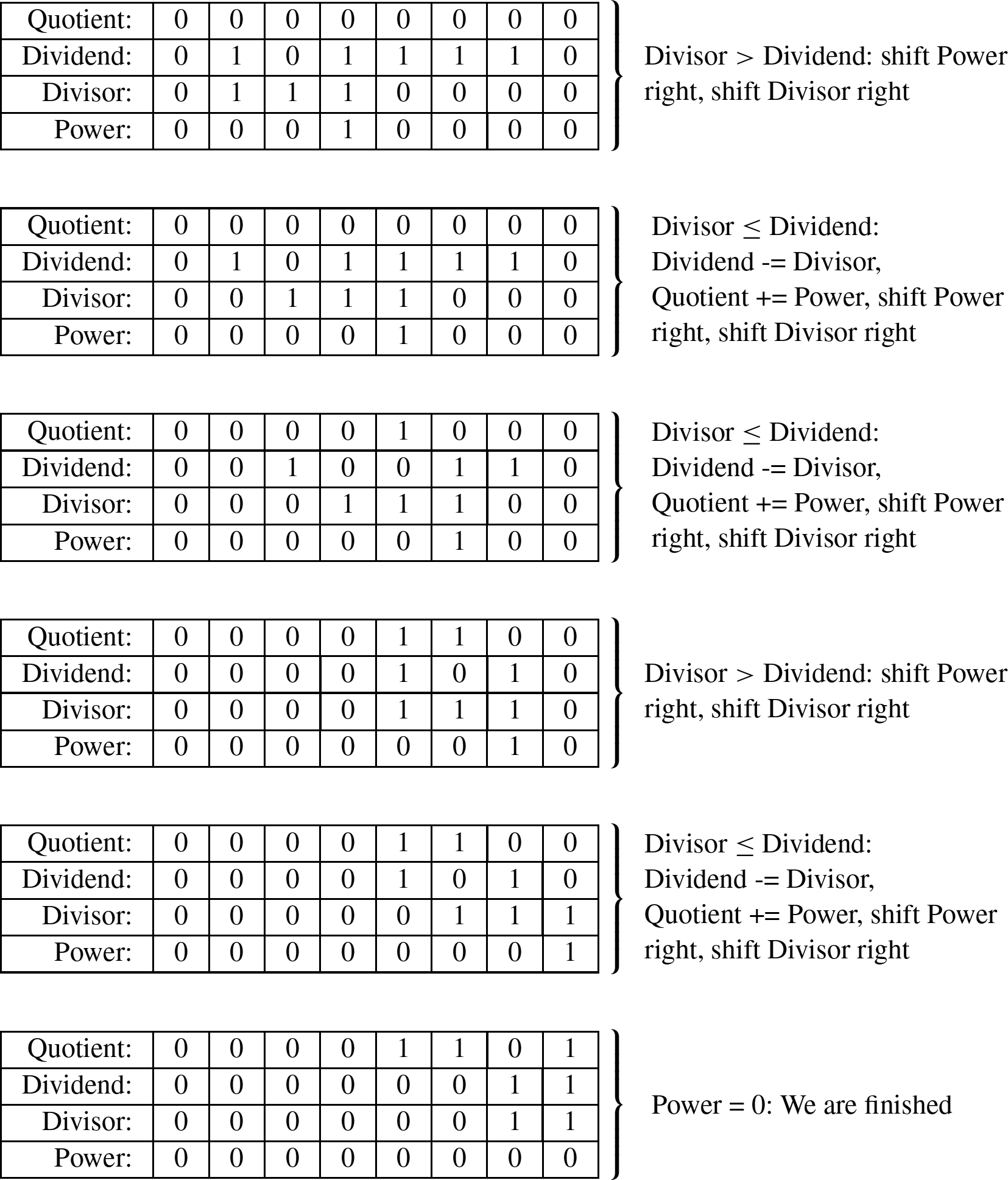
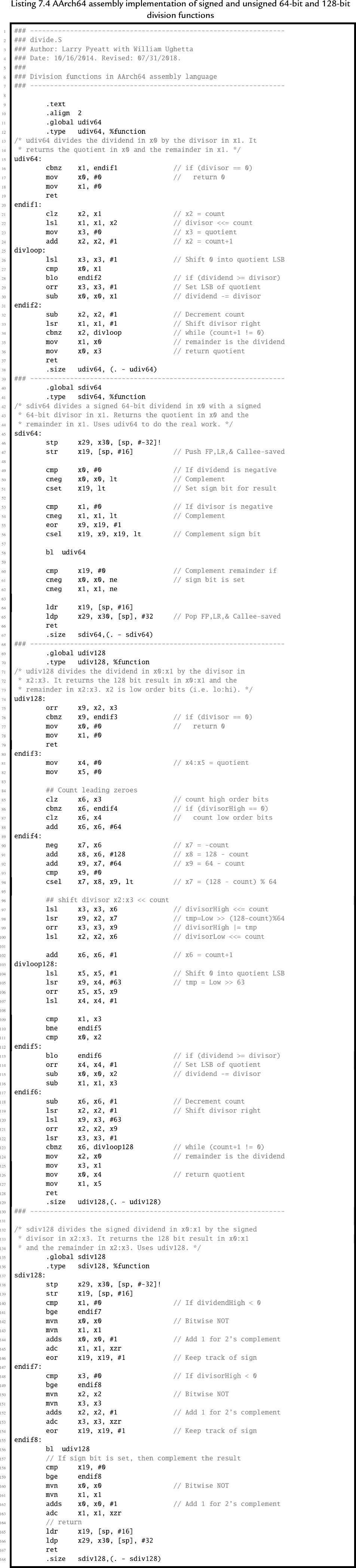
As with the previous version, when the algorithm terminates, the quotient register contains the result of the division, and the modulus (remainder) is in the dividend register. Listing 7.4 shows the AArch64 assembly code to implement this version of the division algorithm for 64-bit numbers, and the counting method for 128-bit numbers.
7.3.3 Division by a constant
In general, division is slow. AArch64 processors provide a hardware divide instruction which requires multiple clock cycles to produce a result, depending on the size of the operands. Some older ARMv7 processors must perform division using software, as previously described. In either case, division is by far the slowest of the basic mathematical operations. However, division by a constant c can be converted to a multiply by the reciprocal of c. It is obviously much more efficient to use a multiply instead of a divide wherever possible. Efficient division of a variable by a constant is achieved by applying the following equality:
The only difficulty is that we have to do it in binary, using only integers. If we modify the right-hand side by multiplying and dividing by some power of two (![]() ), we can rewrite Eq. (7.1) as follows:
), we can rewrite Eq. (7.1) as follows:
Recall that, in binary, multiplying by ![]() is the same as shifting left by n bits, while multiplying by
is the same as shifting left by n bits, while multiplying by ![]() is done by shifting right by n bits. Therefore, Eq. (7.2) is just Eq. (7.1) with two shift operations added. The two shift operations cancel each other out. Now, let
is done by shifting right by n bits. Therefore, Eq. (7.2) is just Eq. (7.1) with two shift operations added. The two shift operations cancel each other out. Now, let

We can rewrite Eq. (7.2) as:
We now have a method for dividing by a constant c which involves multiplying by a different constant, m, and shifting the result. In order to achieve the best precision, we want to choose n such that m is as large as possible with the number of bits we have available.
Suppose we want efficient code to calculate ![]() using 8-bit signed integer multiplication. Our first task is to find
using 8-bit signed integer multiplication. Our first task is to find ![]() such that
such that ![]() . In other words, we want to find the value of n where the most significant bit of m is zero, and the next most significant bit of m is one. If we choose
. In other words, we want to find the value of n where the most significant bit of m is zero, and the next most significant bit of m is one. If we choose ![]() , then
, then
Rounding to the nearest integer gives ![]() . In 8 bits, m is 010110012 or 5916. We now have values for m and n, and therefore we can apply Eq. (7.4) to divide any number x by 23. The procedure is simple: calculate
. In 8 bits, m is 010110012 or 5916. We now have values for m and n, and therefore we can apply Eq. (7.4) to divide any number x by 23. The procedure is simple: calculate ![]() , then shift y right by 11 bits.
, then shift y right by 11 bits.
However, there are two more considerations. First, when the divisor is positive, the result for some values of x may be incorrect due to rounding error. It is usually sufficient to increment the reciprocal value by one in order to avoid these errors. In the previous example, the number would be changed from 5916 to ![]() . When implementing this technique for finding the reciprocal, the programmer should always verify that the results are correct for all input values. The second consideration is when the dividend is negative. In that case it is necessary to subtract one from the final result.
. When implementing this technique for finding the reciprocal, the programmer should always verify that the results are correct for all input values. The second consideration is when the dividend is negative. In that case it is necessary to subtract one from the final result.
For example, to calculate ![]() in binary, with eight bits of precision, we first perform the multiplication as follows:
in binary, with eight bits of precision, we first perform the multiplication as follows:
| 0 | 1 | 1 | 0 | 0 | 1 | 0 | 1 | ||||||
| × | 0 | 1 | 0 | 1 | 1 | 0 | 1 | 0 | |||||
| 0 | 1 | 1 | 0 | 0 | 1 | 0 | 1 | ||||||
| 0 | 1 | 1 | 0 | 0 | 1 | 0 | 1 | ||||||
| 0 | 1 | 1 | 0 | 0 | 1 | 0 | 1 | ||||||
| 0 | 1 | 1 | 0 | 0 | 1 | 0 | 1 | ||||||
| 1 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 |
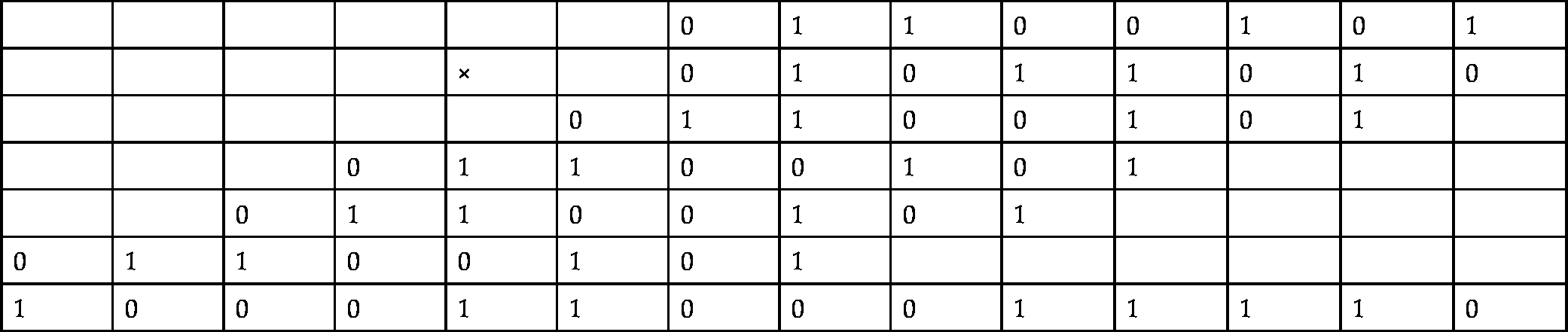
Then shift the result right by 11 bits. 100011000111012 shifted right 1110 bits is: ![]() . If the modulus is required, it can be calculated as
. If the modulus is required, it can be calculated as ![]() , which once again requires multiplication by a constant.
, which once again requires multiplication by a constant.
In the previous example the shift amount of 11 bits provided the best precision possible. But how was that number chosen? The shift amount, n, can be directly computed as
where p is the desired number of bits of precision. The value of m can then be computed as
For example, to divide by the constant 33, with 16 bits of precision, we compute n as
and then we compute m as

Therefore, multiplying a 16 bit number by ![]() and then shifting right 20 bits is equivalent to dividing by 33.
and then shifting right 20 bits is equivalent to dividing by 33.
Example 17
Division by constant 193.
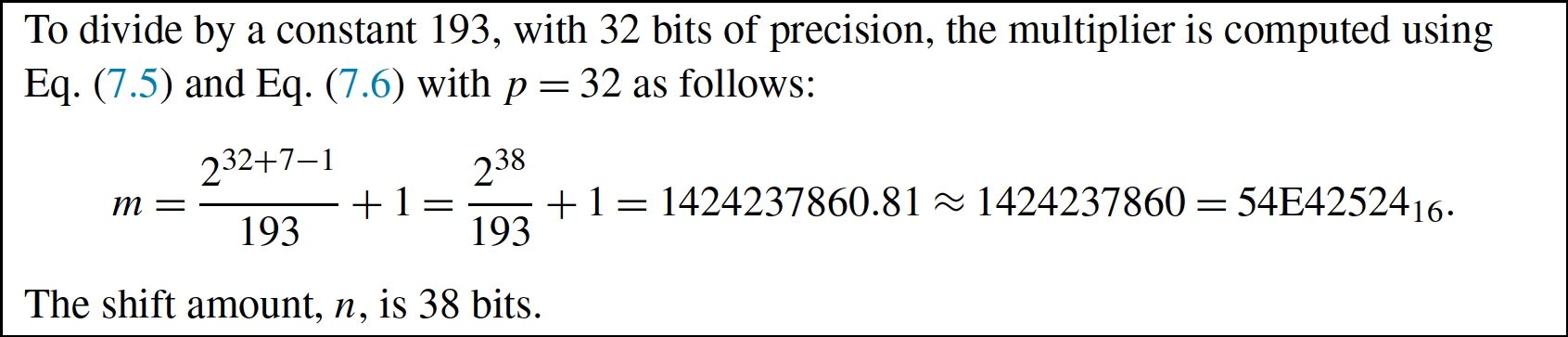
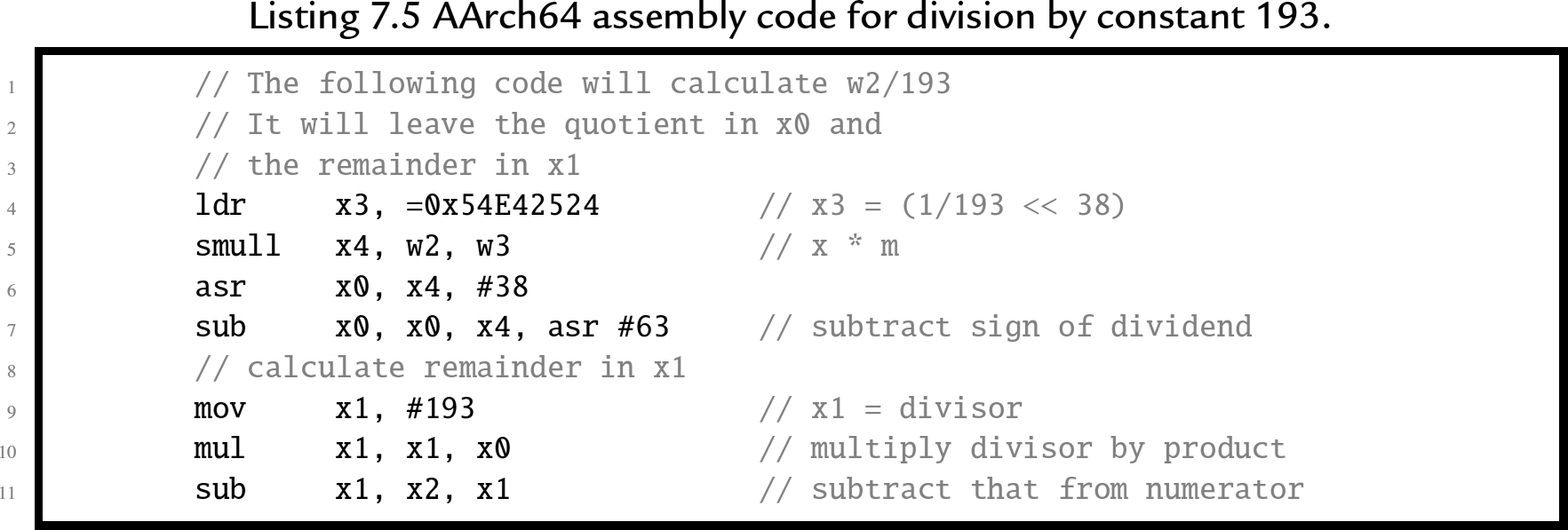
Example 17 shows how to calculate m and n for division by 193. On the AArch64 processor, division by a constant can be performed very efficiently. Listing 7.5 shows how division by 193 can be implemented using only a few lines of code. In the listing, the numbers are 32 bits in length, so the constant m is much larger than in the example that was multiplied by hand, but otherwise the method is the same.
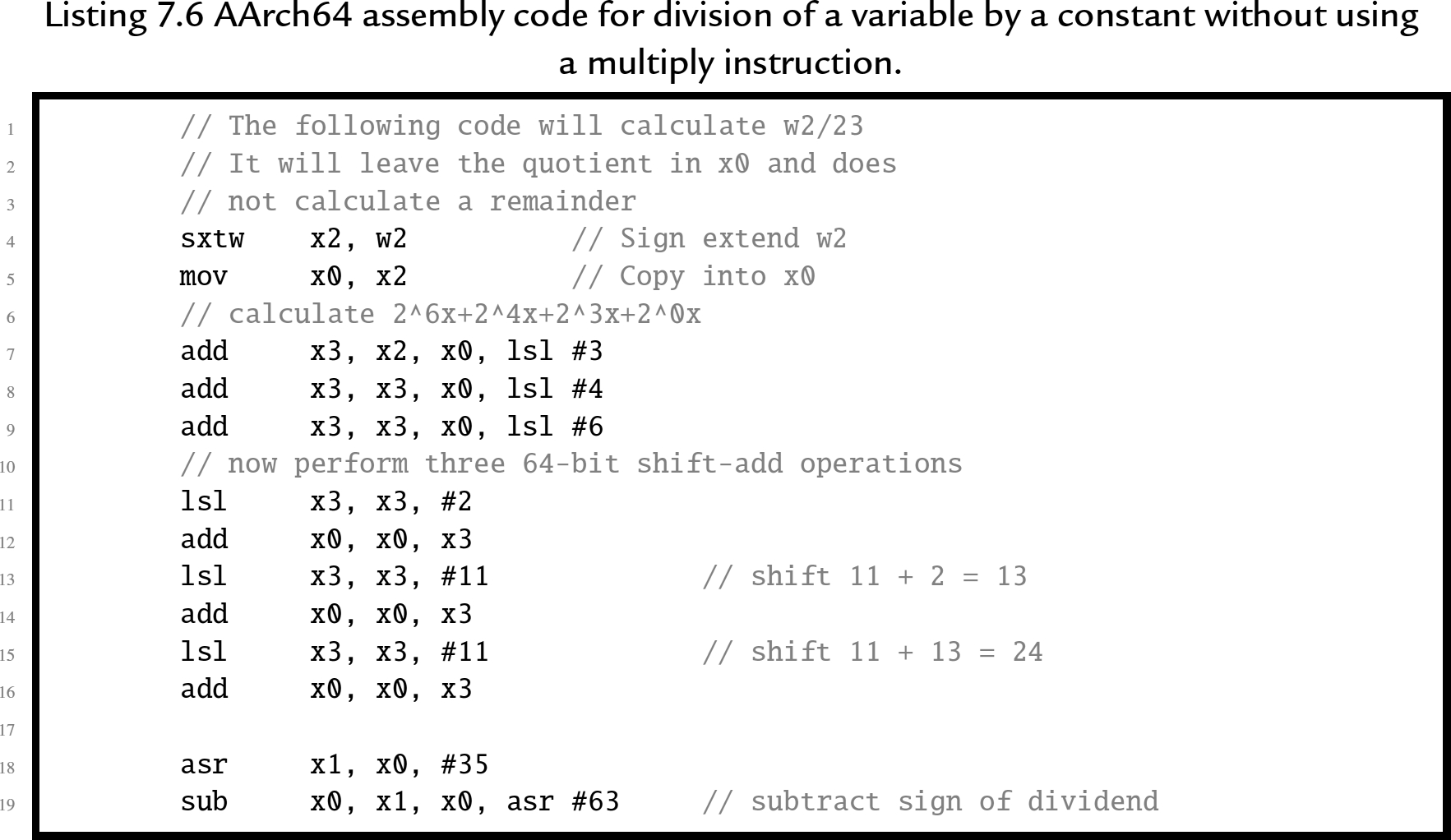
If we wish to divide by 23 using 32 bits of precision, we compute the multiplier as

That is 010110010000101100100001011001012. Note that there are only 12 non-zero bits, and the pattern 1011001 appears three times in the 32-bit multiplier. The multiply can be implemented as ![]() . So the following code sequence can be used on processors that do not have the multiply instruction:
. So the following code sequence can be used on processors that do not have the multiply instruction:
7.3.4 Dividing large numbers
Section 7.2.5 showed how large numbers can be multiplied by breaking them into smaller numbers and using a series of multiplication operations. There is no similar method for synthesizing a large division operation with an arbitrary number of digits in the dividend and divisor. However, there is a method for dividing a large dividend by a divisor given that the division operation can operate on numbers with at least the same number of digits as in the divisor.
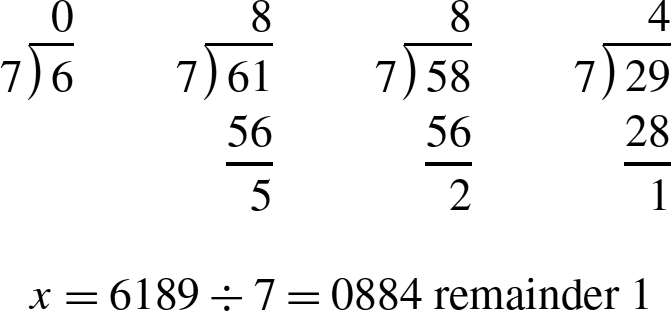
Suppose we wish to perform division of an arbitrarily large dividend by a one digit divisor using a basic division operation that can divide a two digit dividend by a one digit divisor. The operation can be performed in multiple steps as follows:
- 1. Divide the most significant digit of the dividend by the divisor. The result is the most significant digit of the quotient.
- 2. Prepend the remainder from the previous division step to the next digit of the dividend, forming a two-digit number, and divide that by the divisor. This produces the next digit of the result.
- 3. Repeat from step 2 until all digits of the dividend have been processed.
- 4. Take the final remainder as the modulus.
The following example shows how to divide 6189 by 7 using only 2-digits at a time:
This method can be applied in any base and with any number of digits. The only restriction is that the basic division operation must be capable of dividing a 2n digit dividend by an n digit divisor and producing a 2n digit quotient and an n digit remainder. for example, the AArch64 processor is capable of dividing a 64-bit dividend by a 64-bit divisor, producing a 64-bit quotient. The remainder can be calculated by multiplying the quotient by the divisor and subtracting the product from the dividend. Using this division operation it is possible to divide an arbitrarily large dividend by a 32-bit divisor.
We have seen that, given a divide operation capable of dividing an n digit dividend by an n digit divisor, it is possible to divide a dividend with any number of digits by a divisor with ![]() digits. Unfortunately, there is no similar method to deal with an arbitrarily large divisor, or to divide an arbitrarily large dividend by a divisor with more than
digits. Unfortunately, there is no similar method to deal with an arbitrarily large divisor, or to divide an arbitrarily large dividend by a divisor with more than ![]() digits. In those cases the division must be performed using a general division algorithm as shown previously.
digits. In those cases the division must be performed using a general division algorithm as shown previously.
7.4 Big integer ADT
For some programming tasks, it may be helpful to deal with arbitrarily large integers. For example, the factorial function and Ackerman's function grow very quickly and will overflow a 32-bit integer for even small input values. Even a 64 bit integer is insufficient for holding the results of these functions with even relatively small inputs. The GNU C compiler is able to do some big number arithmetic using ![]() , but even a 128 bit integer is insufficient for these functions.
, but even a 128 bit integer is insufficient for these functions.
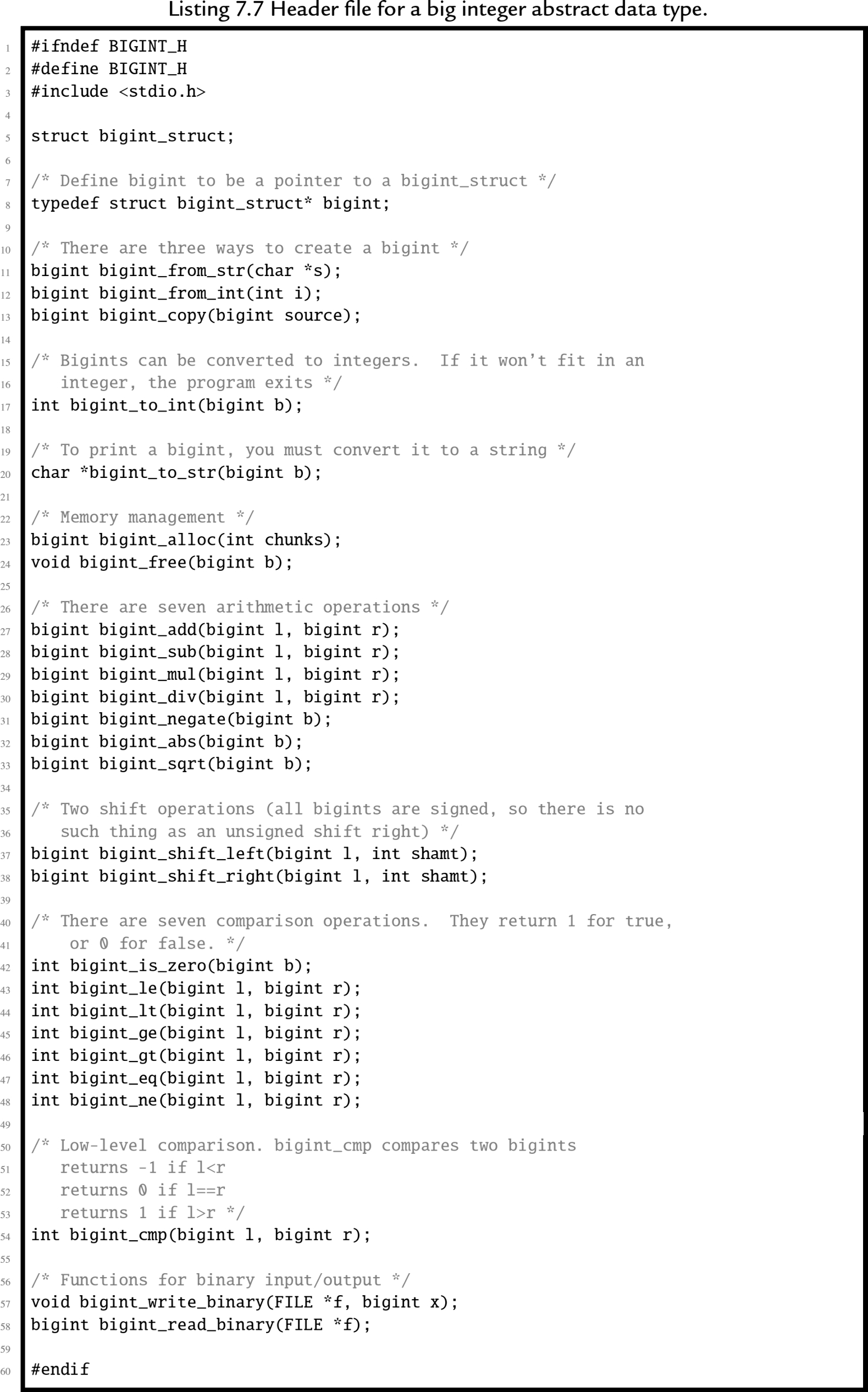
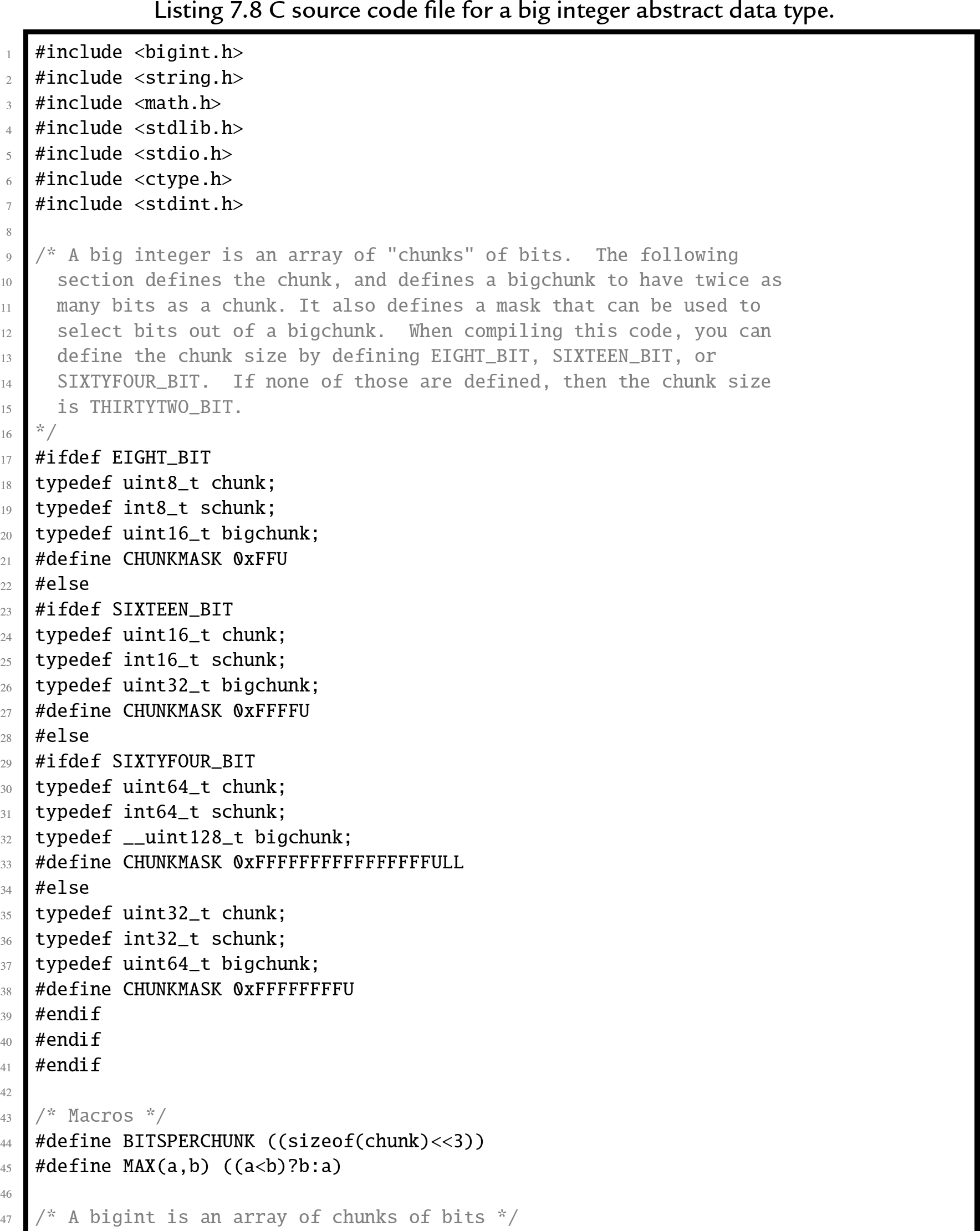
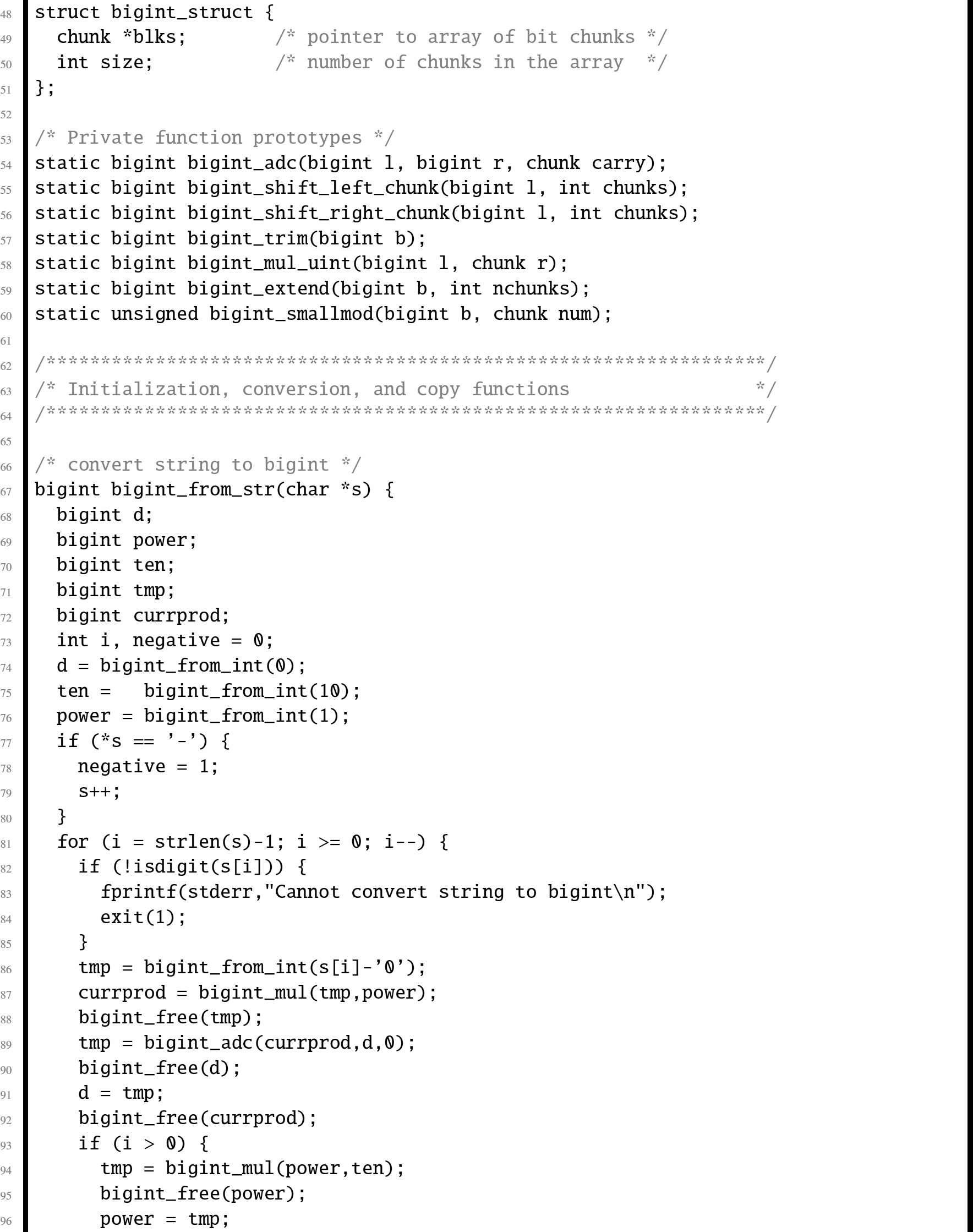
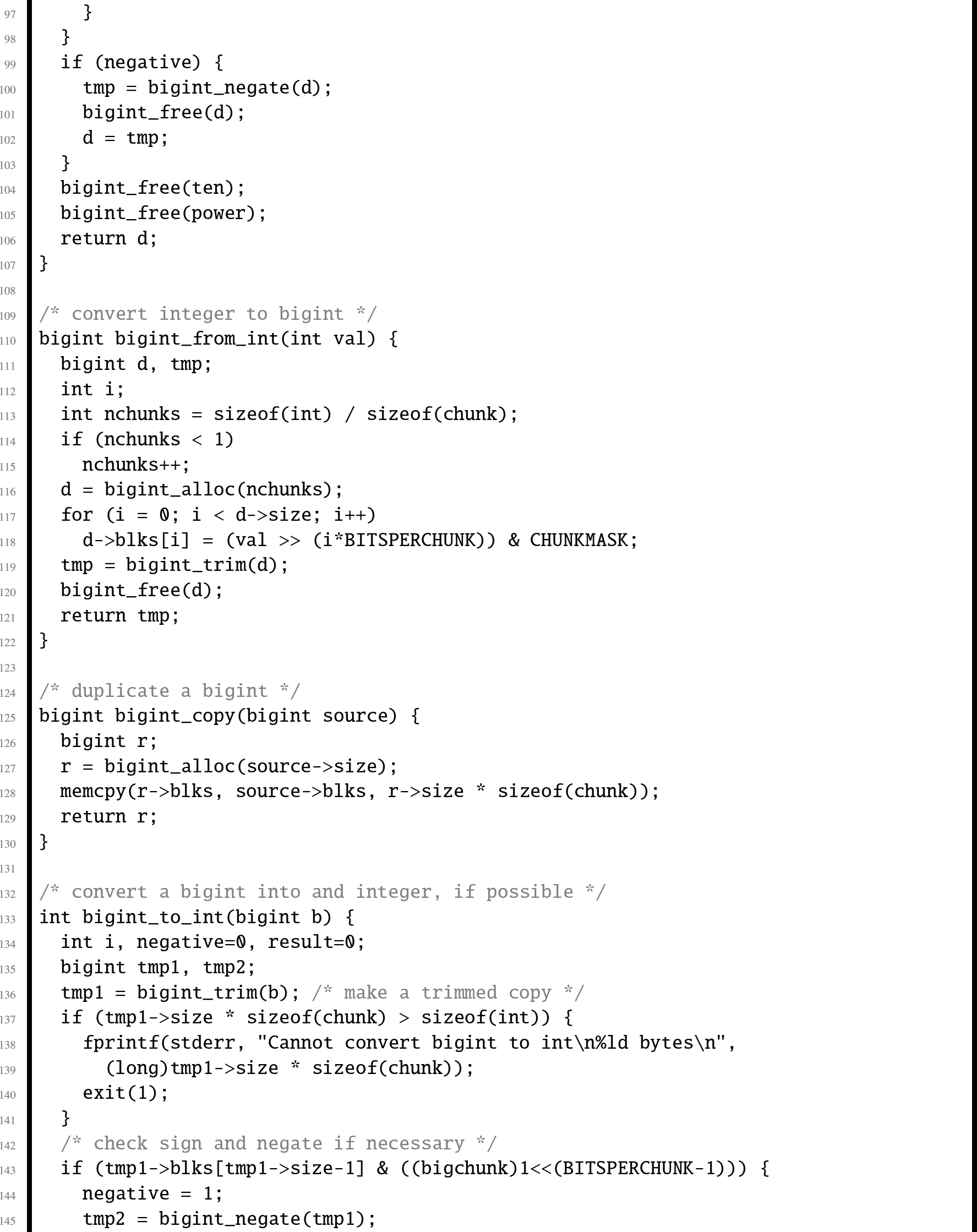
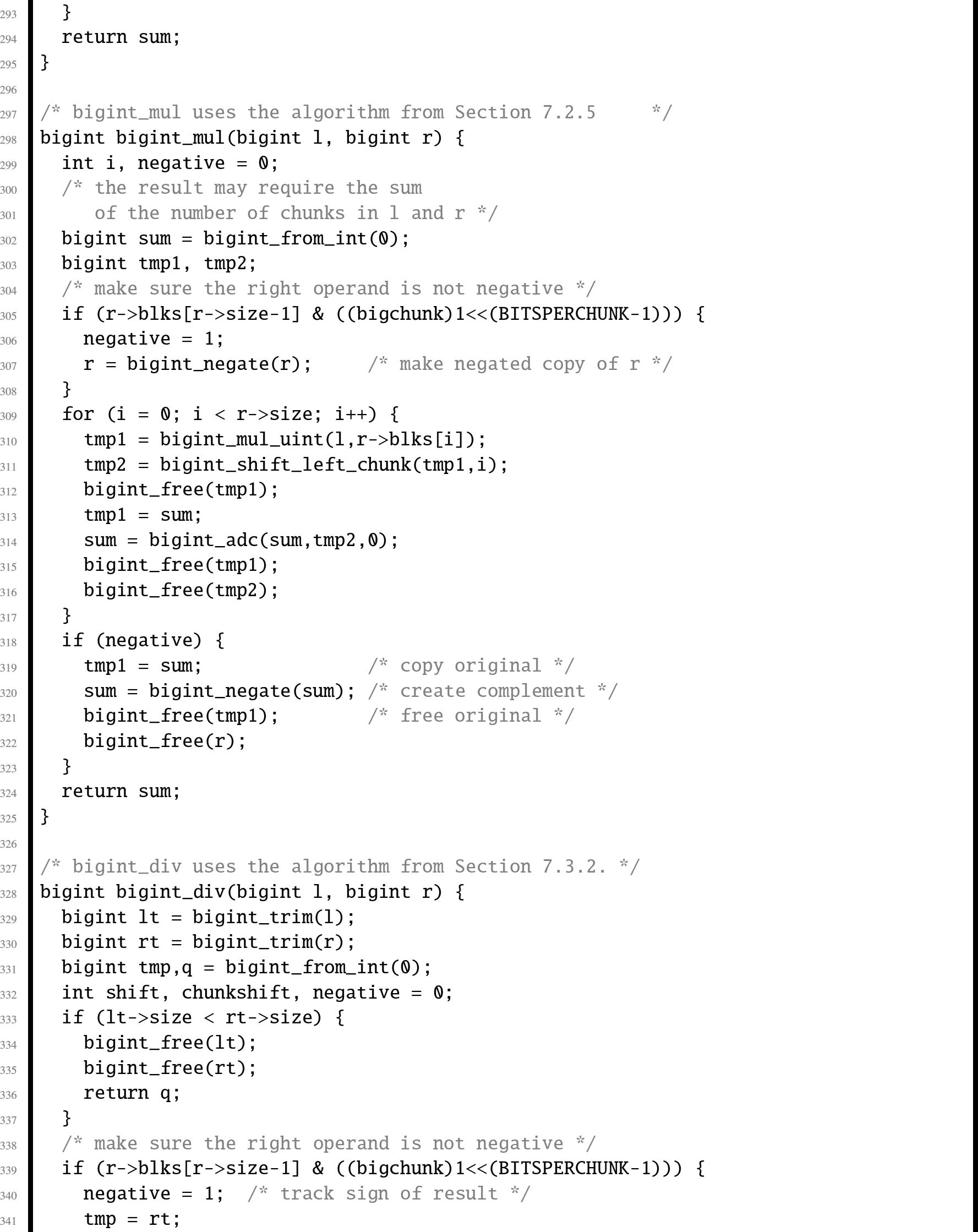
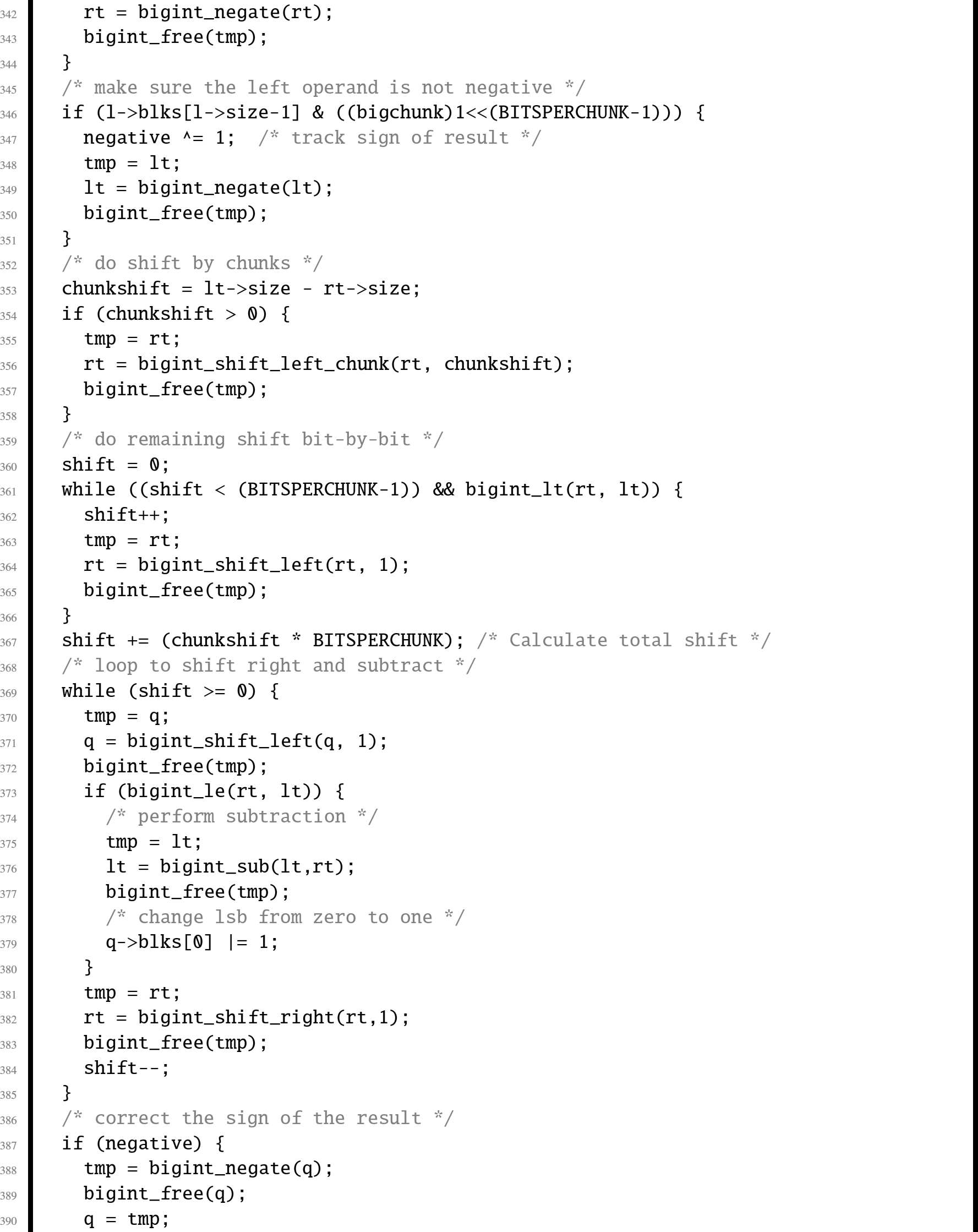
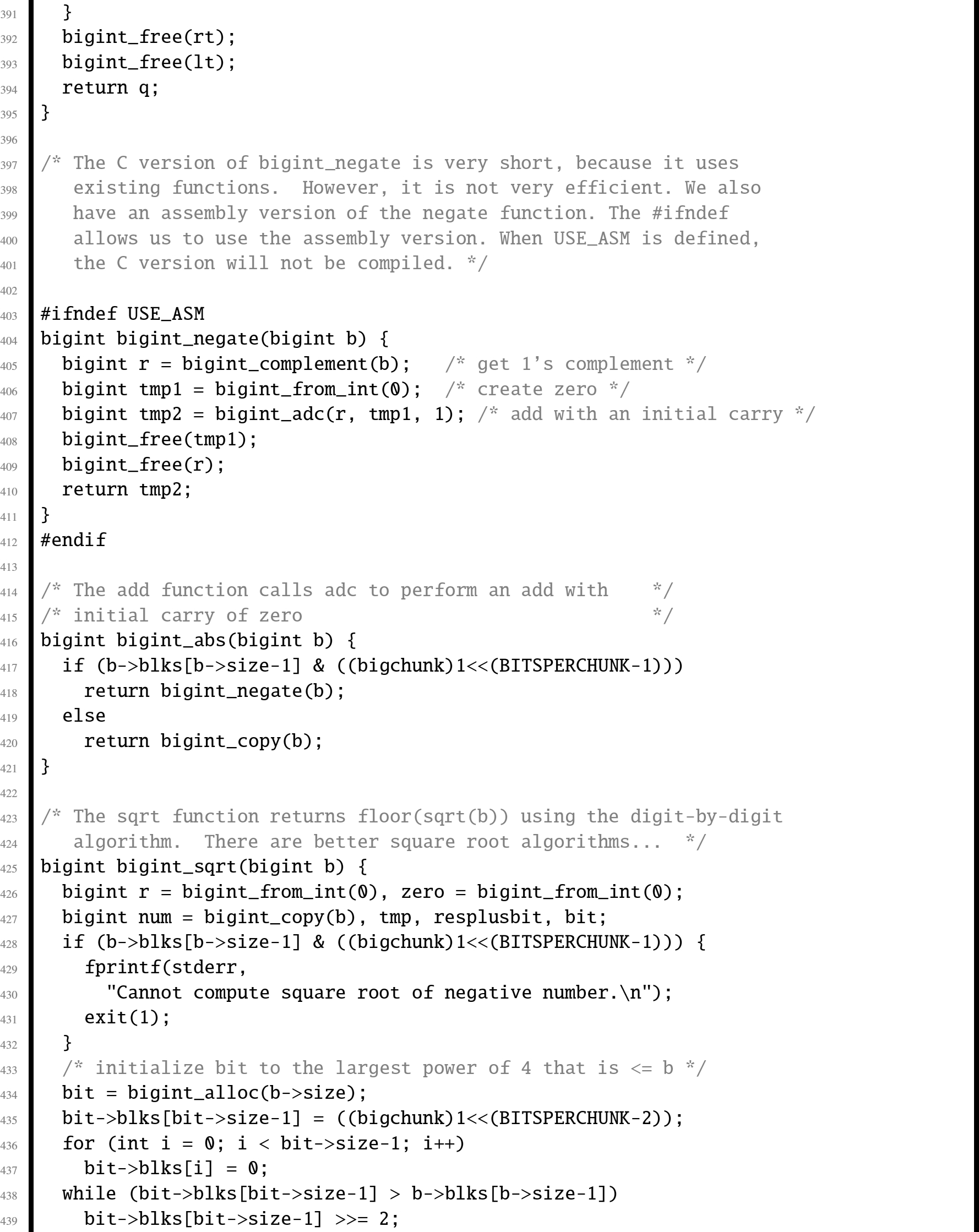
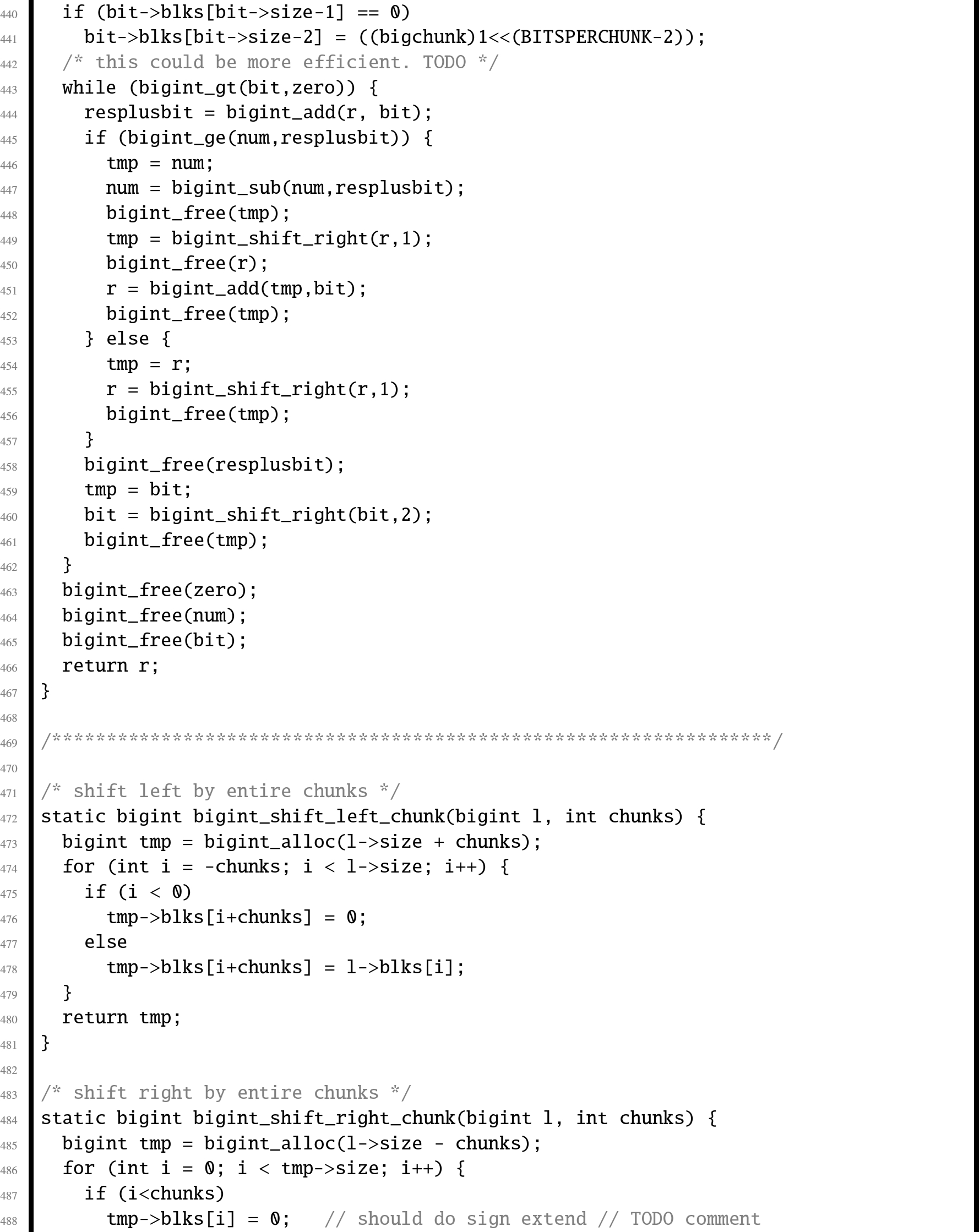
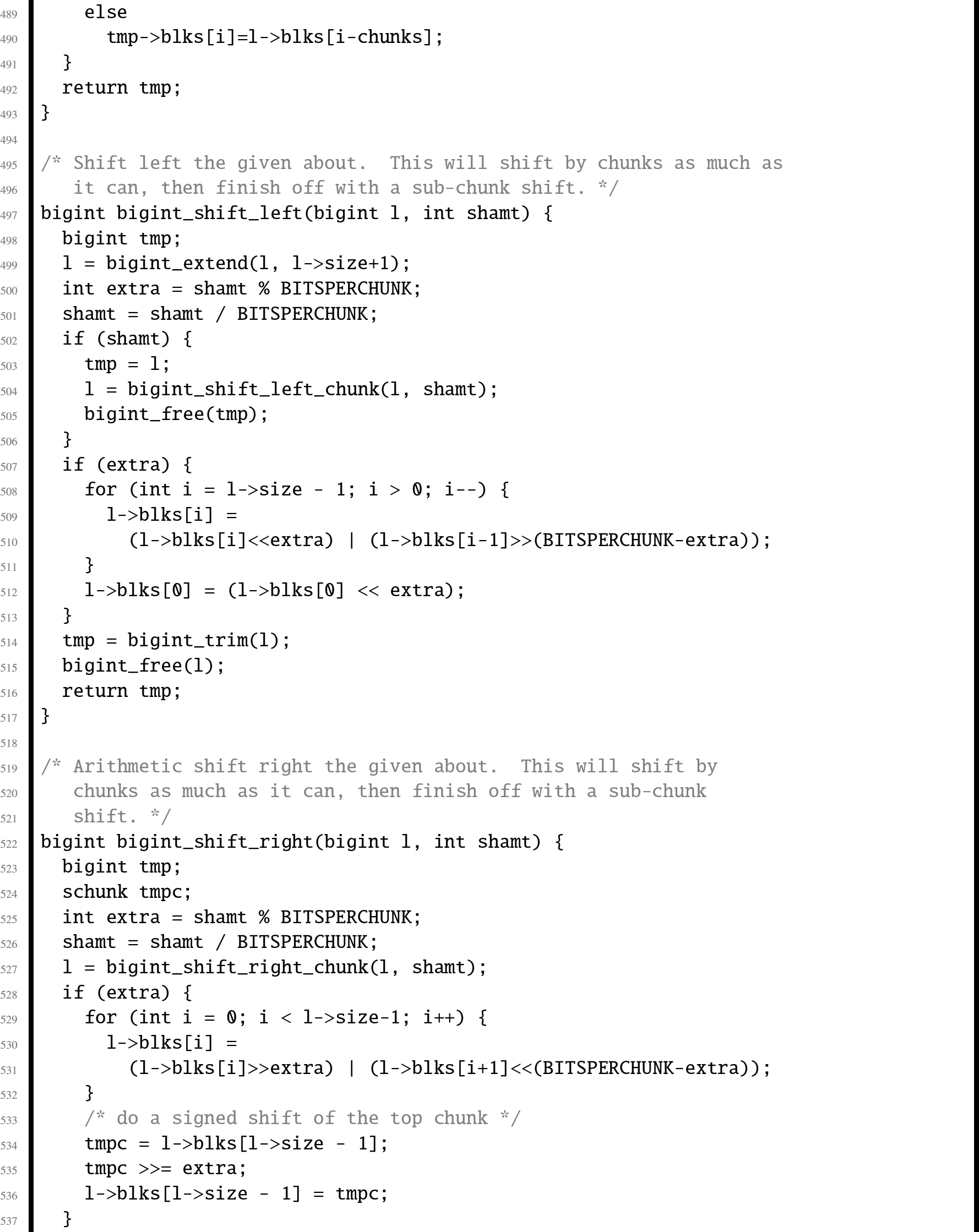
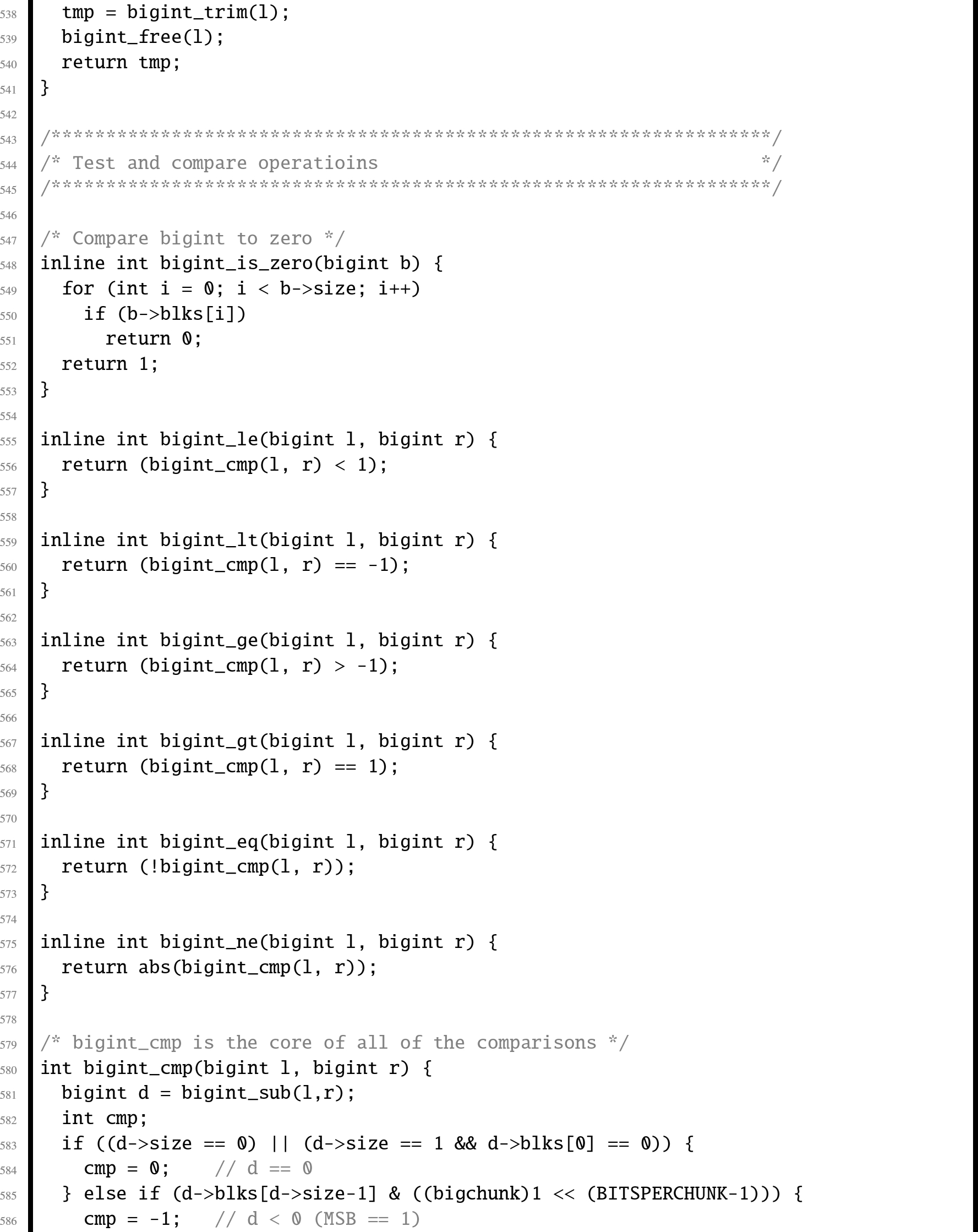
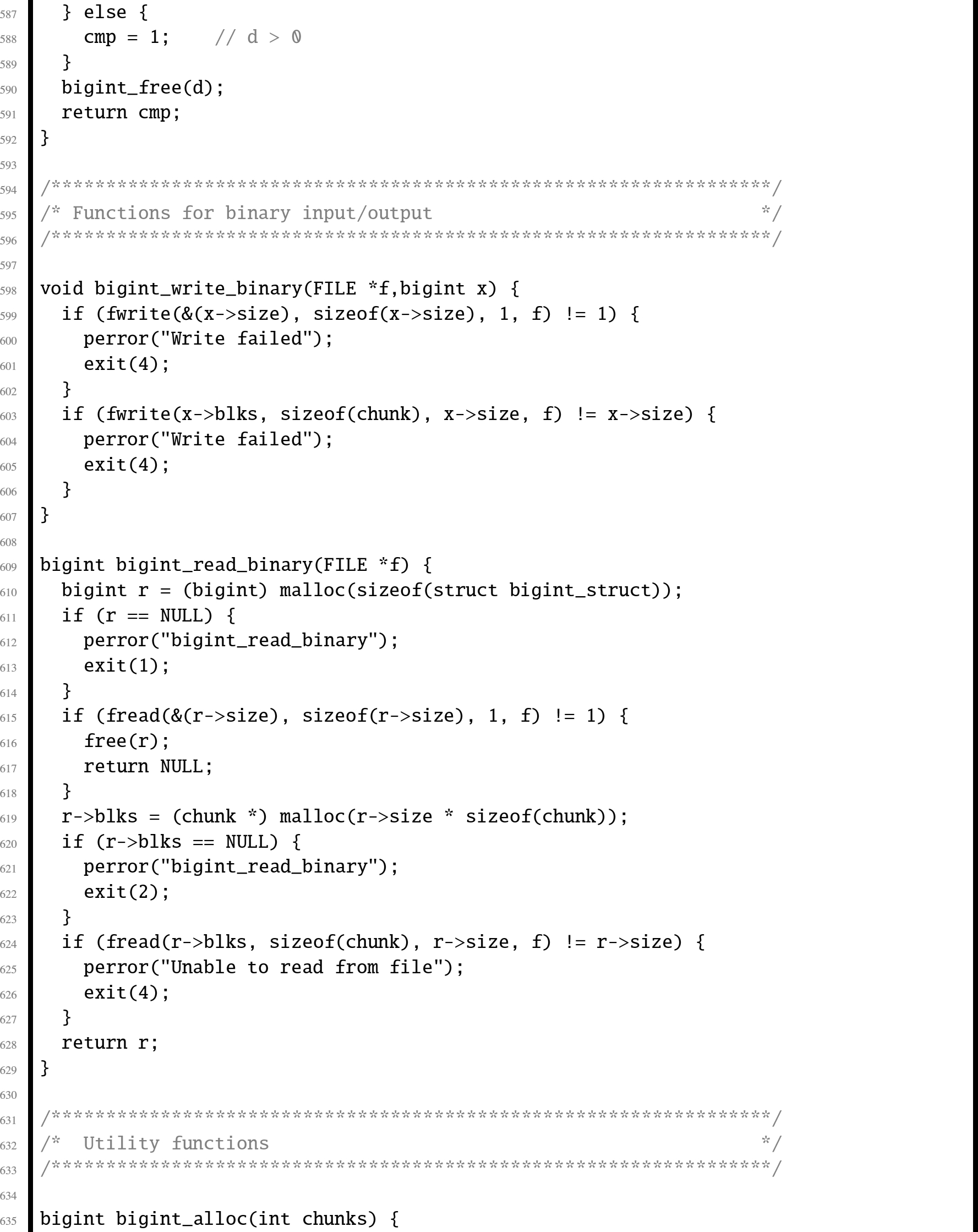
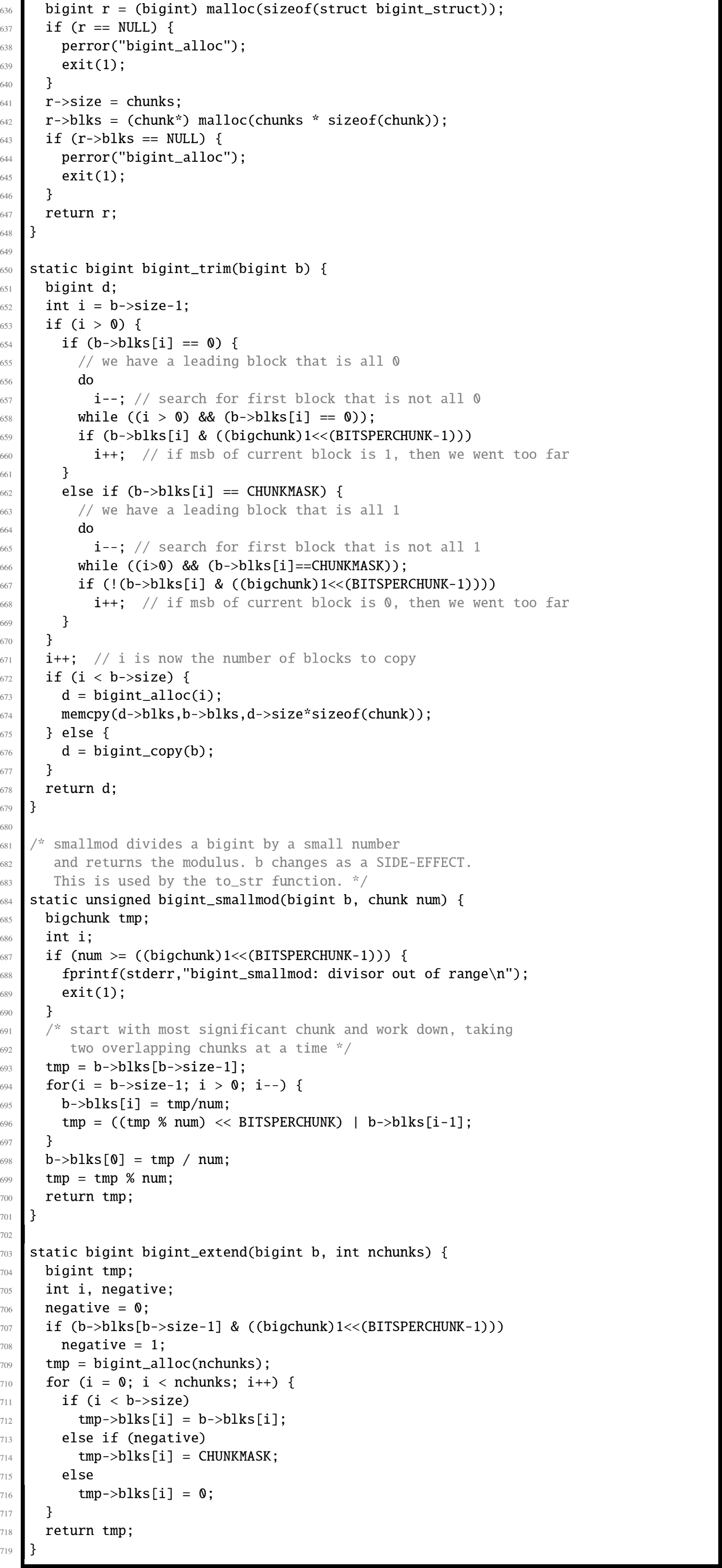
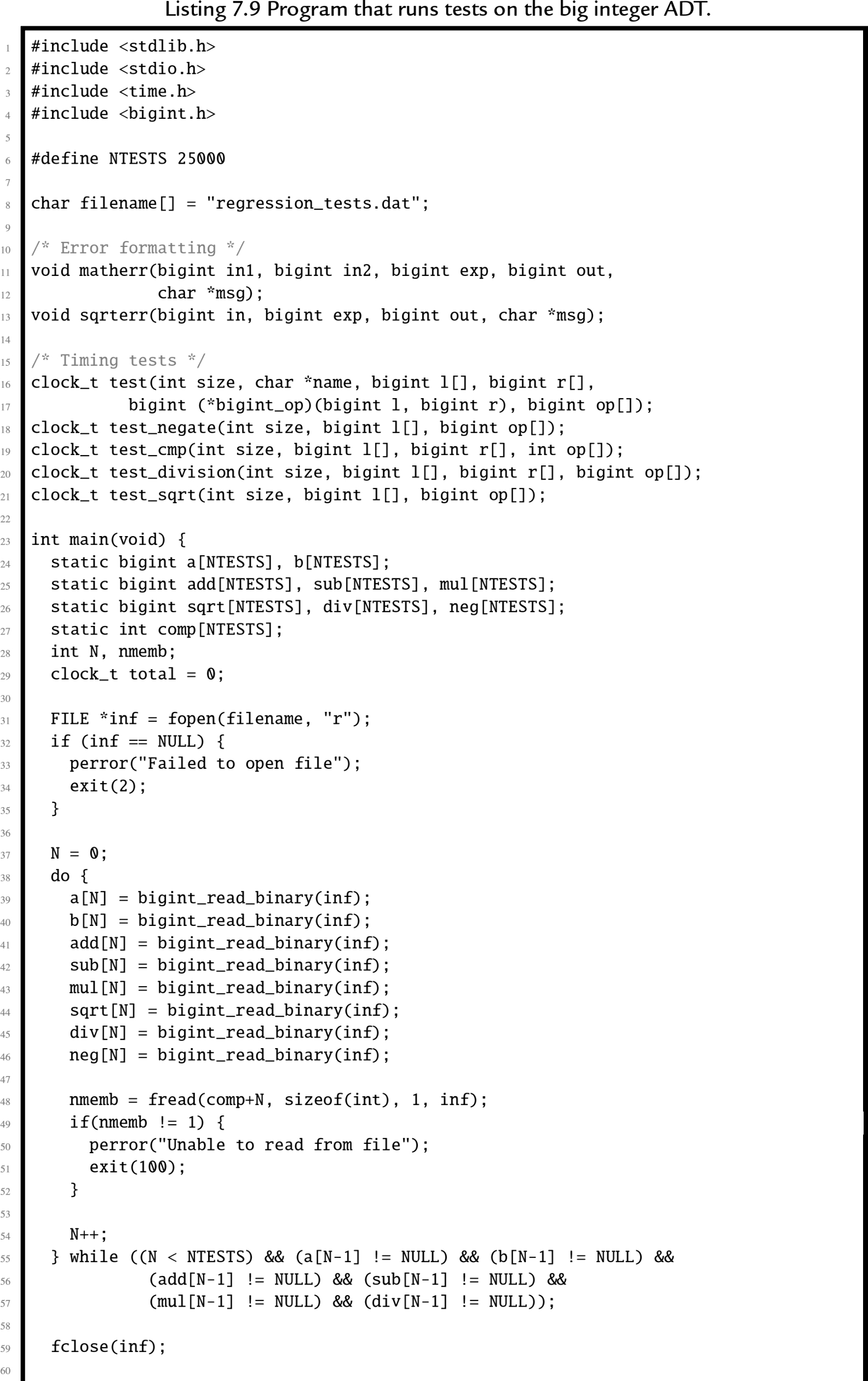
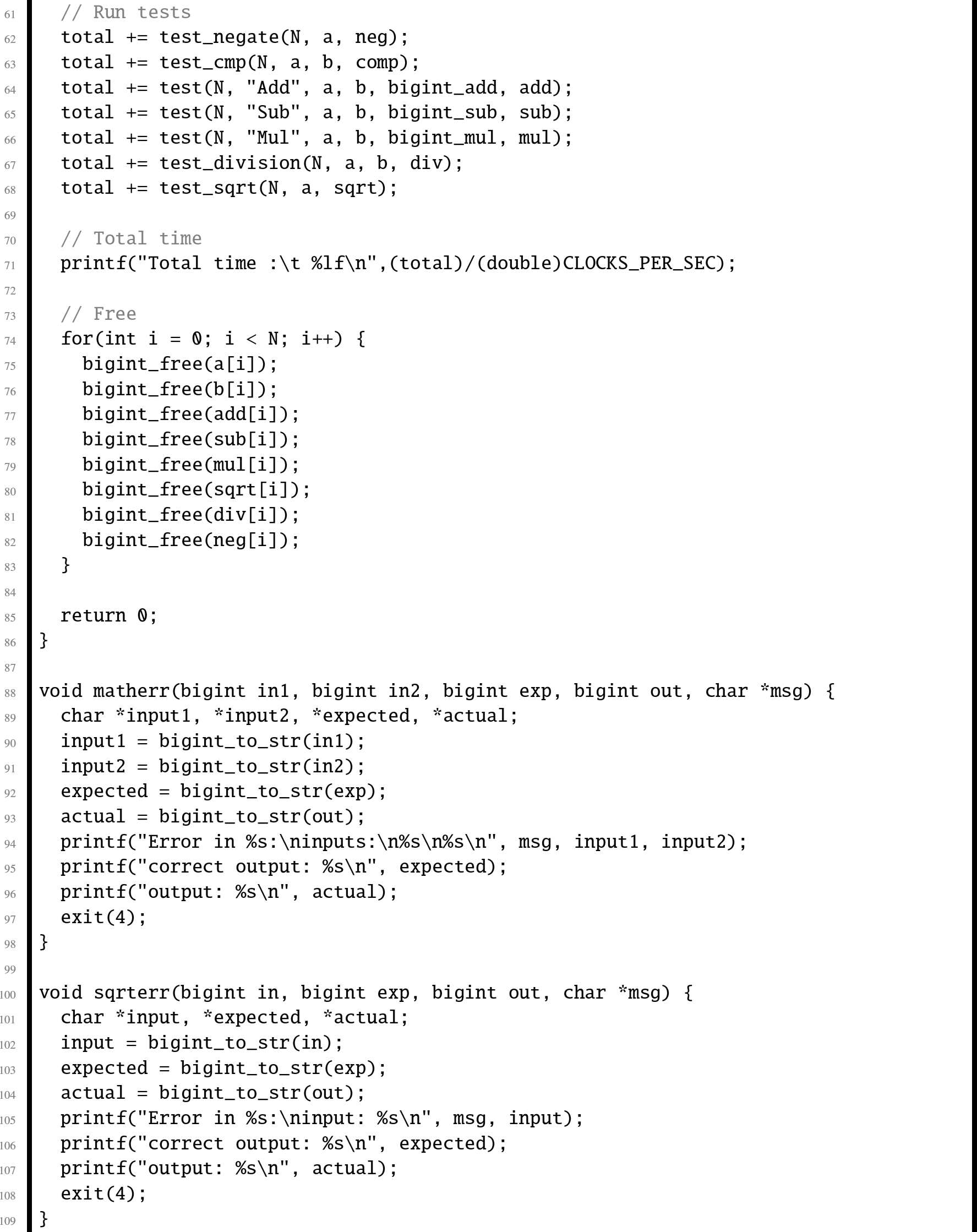
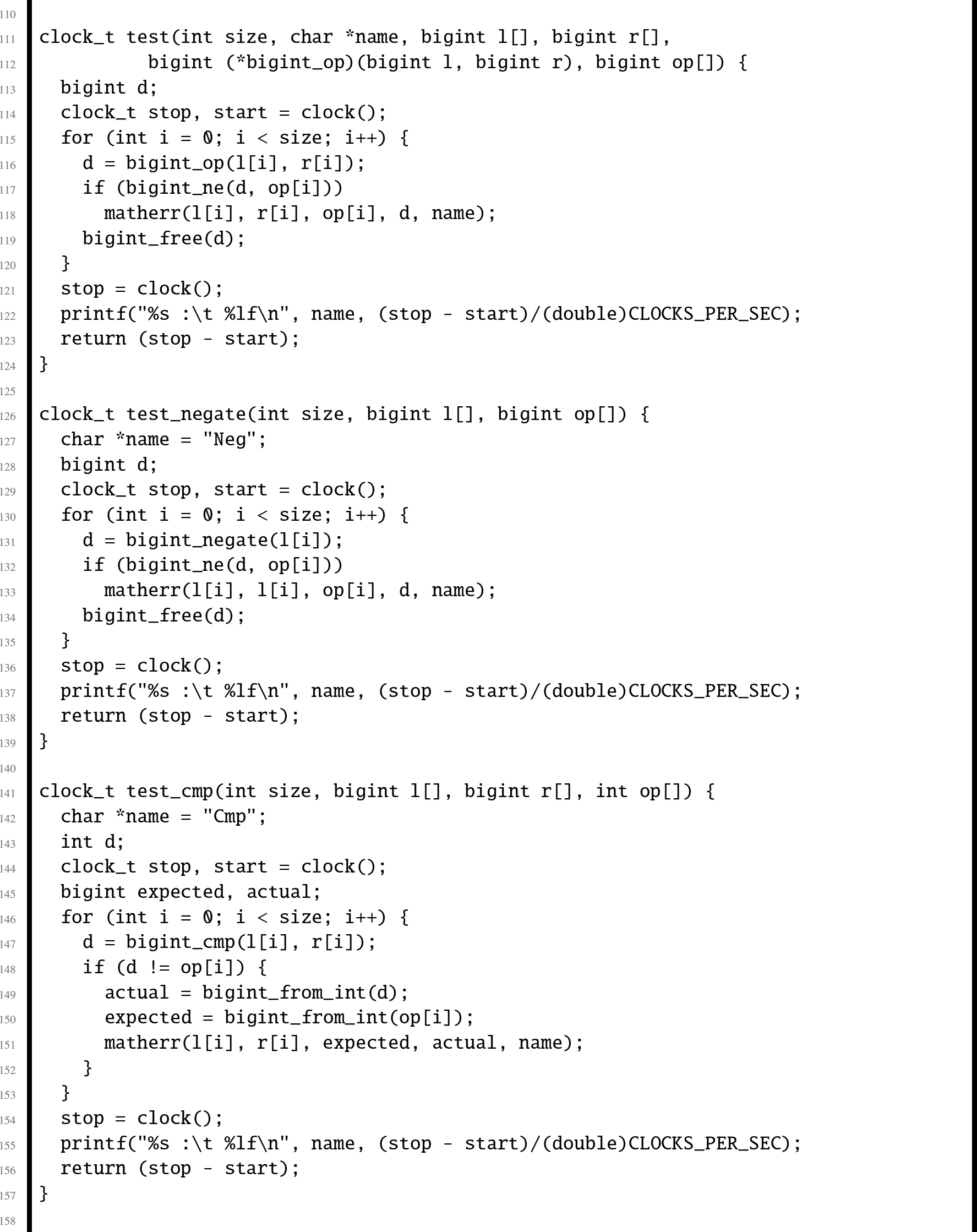
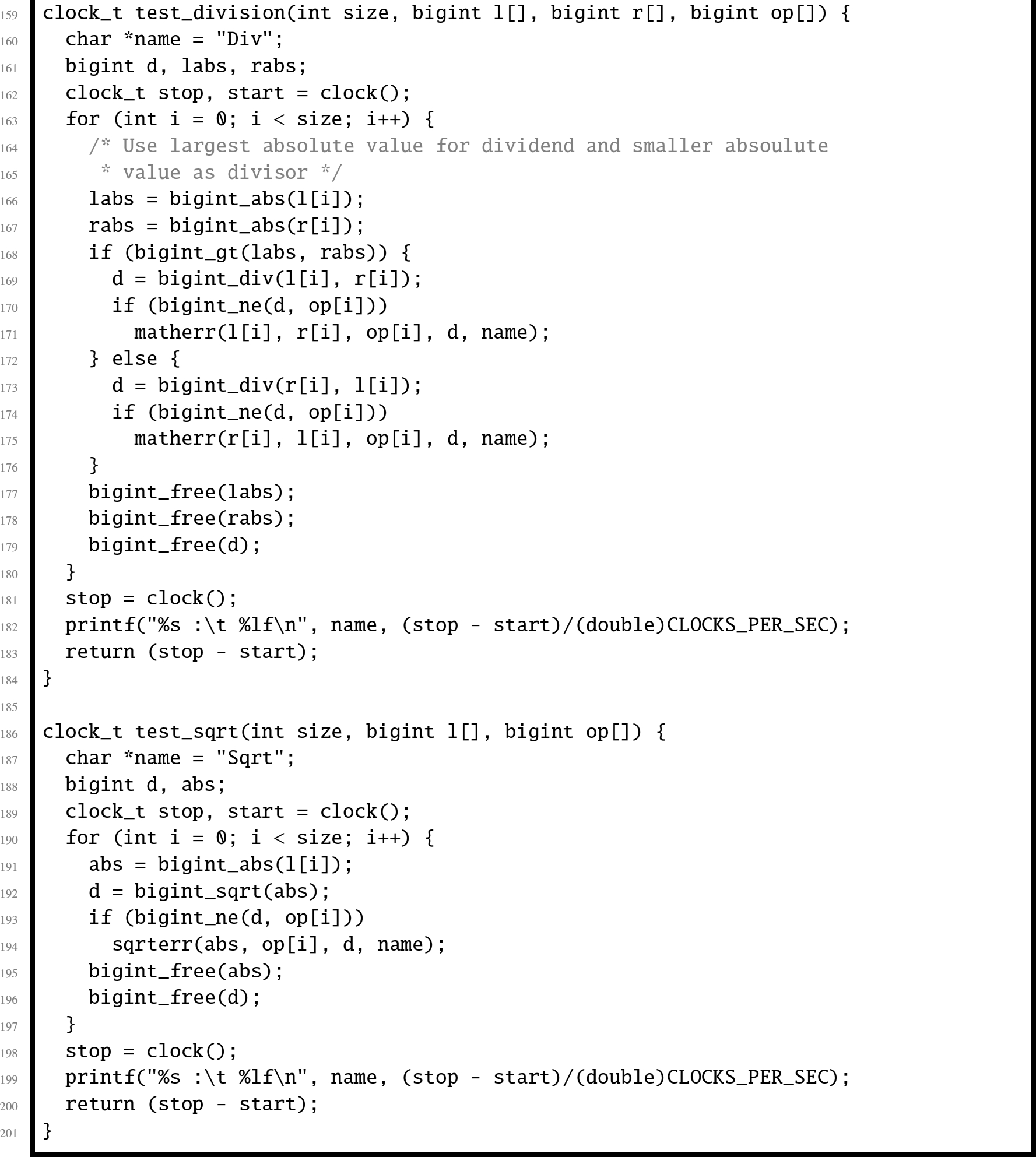
In this section, we will examine an abstract data type which provides basic operations for arbitrarily large integer values. Listing 7.7 shows the C header for this ADT, and Listing 7.8 shows the C implementation. Listing 7.9 shows a small program that runs regression tests on the big integer ADT. A regression test is a (relatively) small test that is used to verify that changes to the code have not introduced bugs. Regression tests are very valuable tools in software engineering, and are typically used in larger companies by code testing specialists.
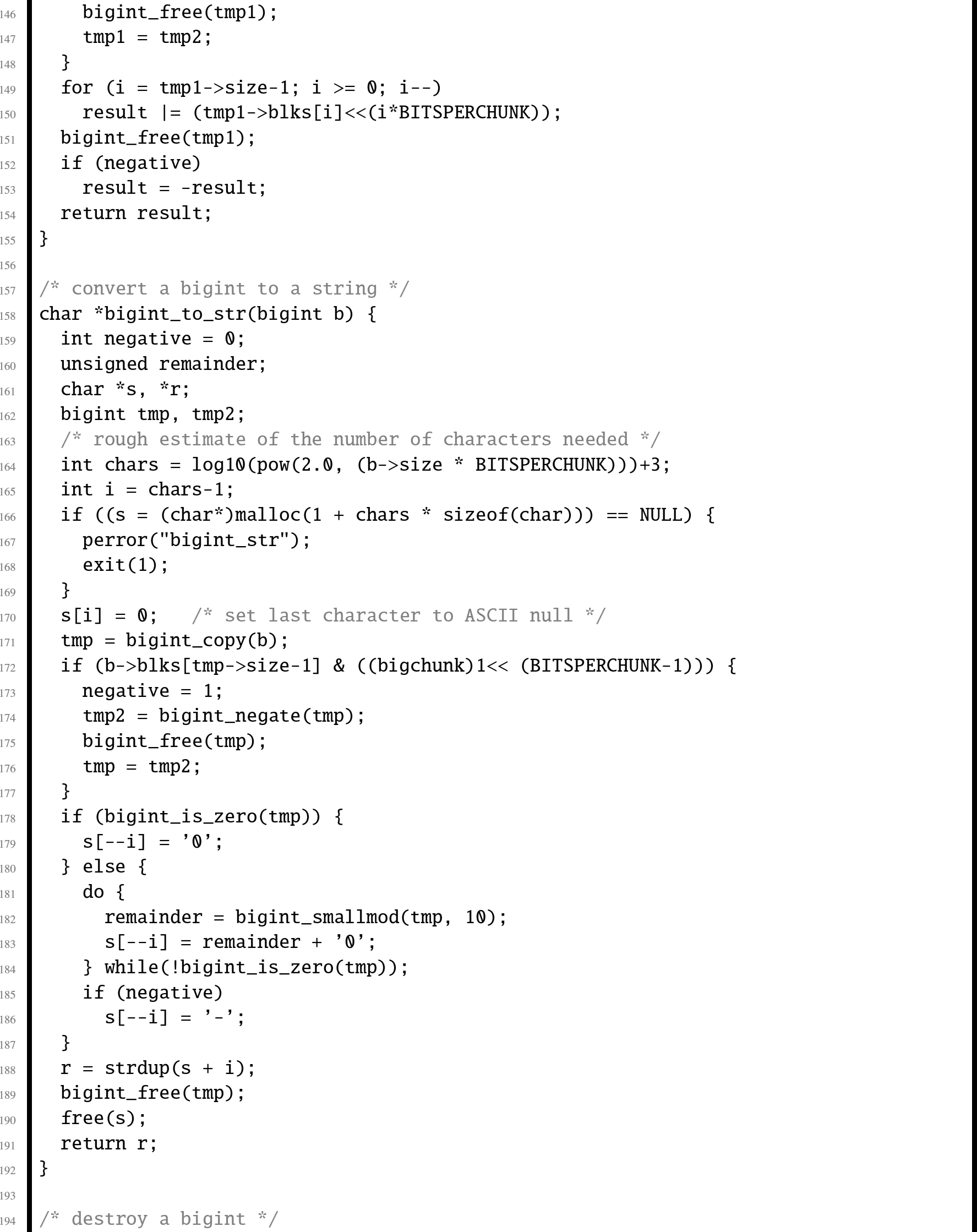
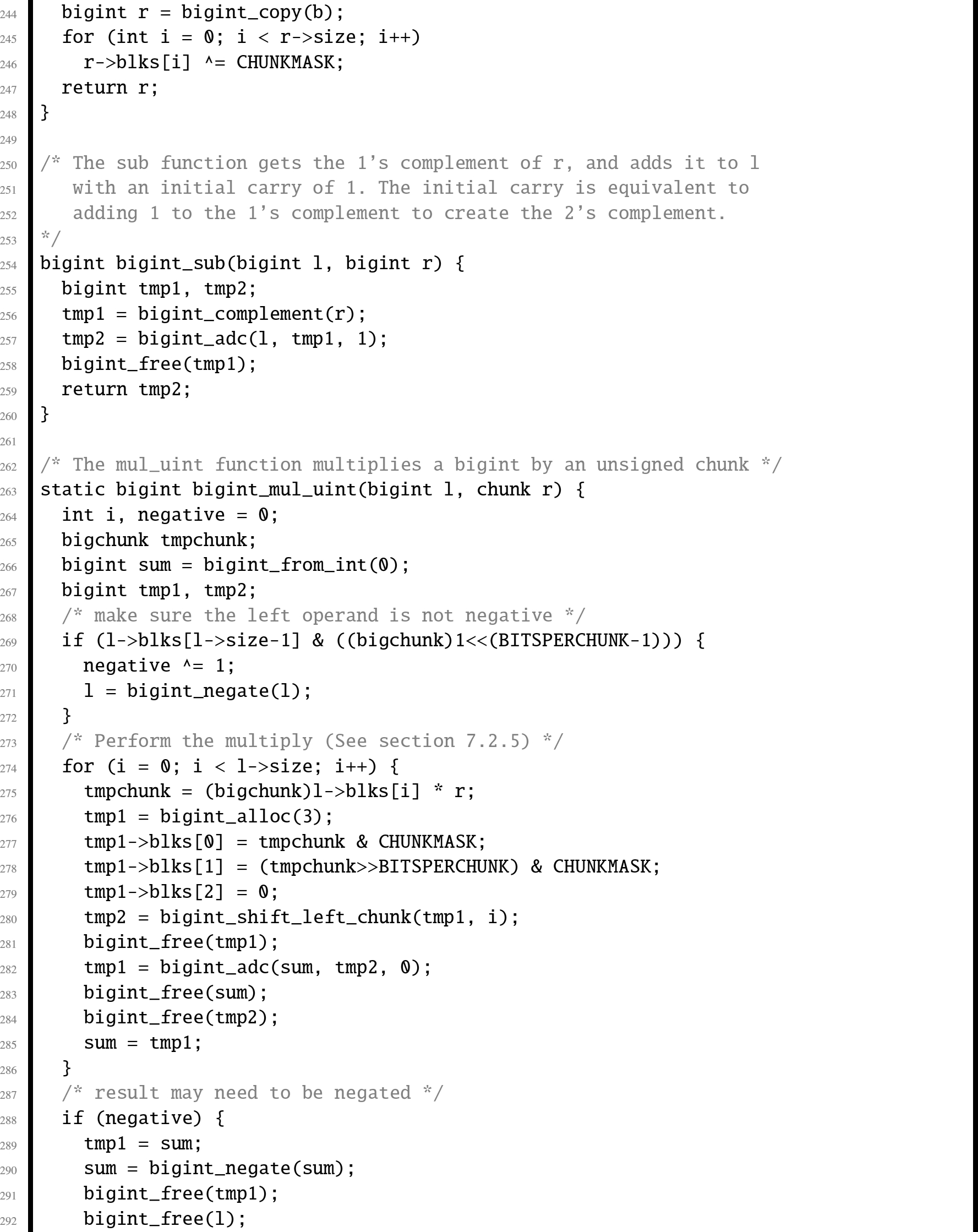
The implementation could be made more efficient by writing some of the functions in assembly language. One opportunity for improvement is in the add function, which must calculate the carry from one chunk of bits to the next. In assembly, the programmer has direct access to the carry bit, so carry propagation should be much faster.
When attempting to speed up a C program by converting selected parts of it to assembly language, it is important to first determine where the most significant gains can be made. A profiler, such as ![]() or
or ![]() , can be used to help identify the sections of code that will have the greatest impact on performance. It is also important to make sure that the result is not just highly optimized C code. If the code cannot benefit from some features offered by assembly, then it may not be worth the effort of re-writing in assembly. The code should be re-written from a pure assembly language viewpoint.
, can be used to help identify the sections of code that will have the greatest impact on performance. It is also important to make sure that the result is not just highly optimized C code. If the code cannot benefit from some features offered by assembly, then it may not be worth the effort of re-writing in assembly. The code should be re-written from a pure assembly language viewpoint.
It is also important to avoid premature assembly programming. Make sure that the C algorithms and data structures are efficient before moving to assembly. if a better algorithm can give better performance, then assembly may not be required at all. Once the assembly is written, it is more difficult to make major changes to the data structures and algorithms. Assembly language optimization is the final step in optimization, not the first one.
Well-written C code is modularized, with many small functions. This helps readability, promotes code reuse, and may allow the compiler to better optimization. However, each function call has some associated overhead. If optimal performance is the goal, then calling many small functions should be avoided. For instance, if the piece of code to be optimized is in a loop body, then it may be best to write the entire loop in assembly, rather than writing a function and calling it each time through the loop. Writing in assembly is not a guarantee of performance. Spaghetti code is slow. Load/store instructions are slow. Multiplication and division are slow. The secret to good performance is avoiding things that are slow. Good optimization requires rethinking the code to take advantage of assembly language.
The profiler indicated that ![]() is used more than any other function. If assembly language can make this function run faster, then it should have a profound effect on the program. We will leave that as an exercise for the student, but will give an example of how to optimize a less critical function. The
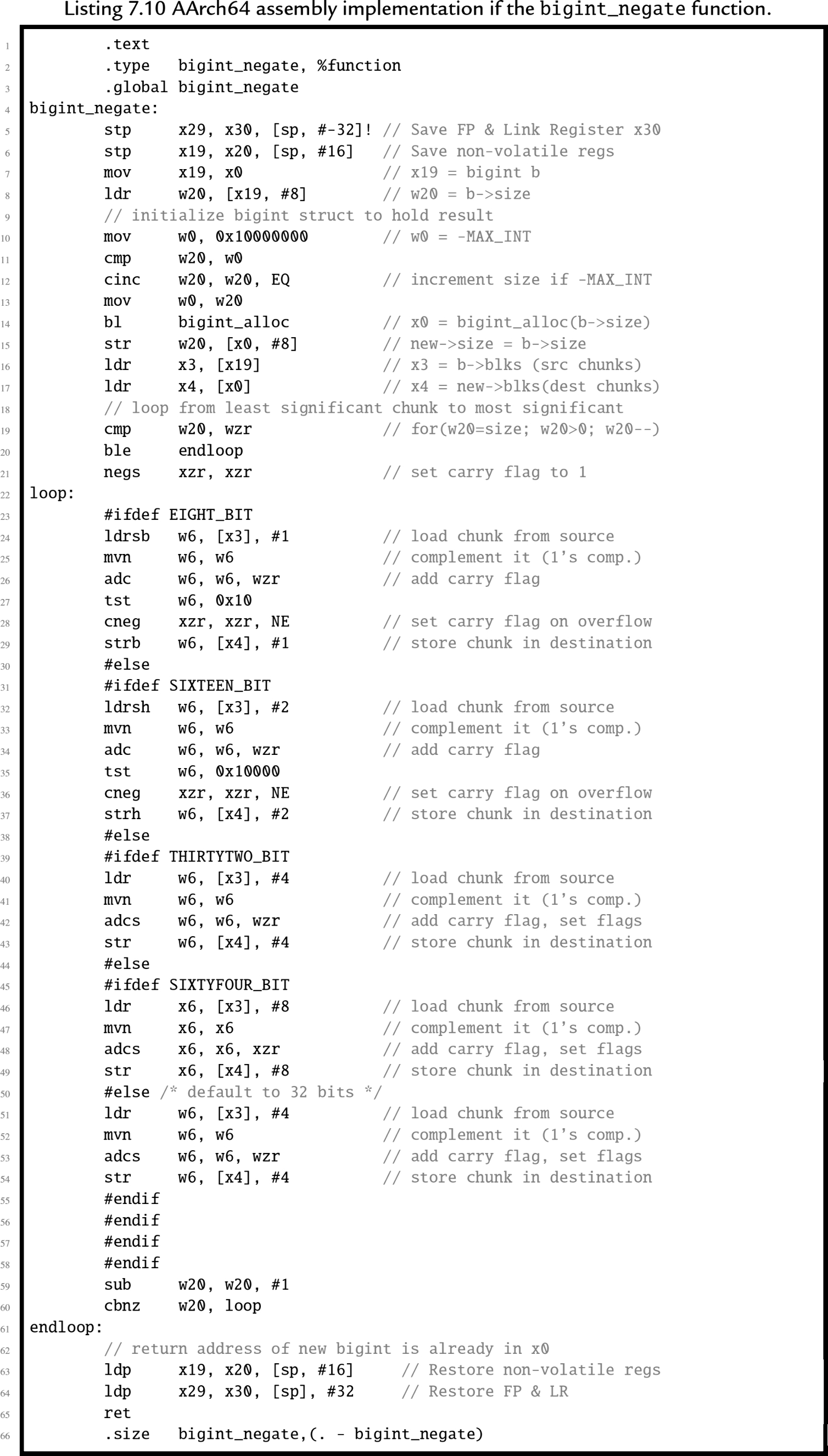
is used more than any other function. If assembly language can make this function run faster, then it should have a profound effect on the program. We will leave that as an exercise for the student, but will give an example of how to optimize a less critical function. The ![]() function was re-written in assembly, as shown in Listing 7.10. Note that the original C implementation used the
function was re-written in assembly, as shown in Listing 7.10. Note that the original C implementation used the ![]() function to get the 1's complement, and then used the
function to get the 1's complement, and then used the ![]() function to add one. The C implementation of the
function to add one. The C implementation of the ![]() function requires extra code to calculate the carry from one chunk to the next. However, the assembly version of
function requires extra code to calculate the carry from one chunk to the next. However, the assembly version of ![]() loads each chunk, complements it, and propagates the carry all in one step. Since it only loads and stores the data once, instead of twice, and requires much less work to propagate the carry bit, we would expect the assembly version to run about twice as fast as the C version.
loads each chunk, complements it, and propagates the carry all in one step. Since it only loads and stores the data once, instead of twice, and requires much less work to propagate the carry bit, we would expect the assembly version to run about twice as fast as the C version.
The ![]() testing program was executed on an nVidia Jetson TX-1 using the C version of
testing program was executed on an nVidia Jetson TX-1 using the C version of ![]() and then with the assembly version. This was done for chunk sizes of 32 bits and 64 bits. The results are shown in Table 7.1. The total time required for the negate function tests using the 32-bit C version was 0.097846 seconds. The 32-bit assembly version ran in 0.049903 seconds, for a speedup of 1.96, which means that the assembly version was almost twice as fast as the C version. The 64-bit C version ran in 0.095243 seconds, while the 64-bit assembly code ran in 0.048488 seconds, which gives a 1.96 speedup. Note that the assembly version with a 64-bit chunk size is more than twice as fast as the C version using 32-bit chunks.
and then with the assembly version. This was done for chunk sizes of 32 bits and 64 bits. The results are shown in Table 7.1. The total time required for the negate function tests using the 32-bit C version was 0.097846 seconds. The 32-bit assembly version ran in 0.049903 seconds, for a speedup of 1.96, which means that the assembly version was almost twice as fast as the C version. The 64-bit C version ran in 0.095243 seconds, while the 64-bit assembly code ran in 0.048488 seconds, which gives a 1.96 speedup. Note that the assembly version with a 64-bit chunk size is more than twice as fast as the C version using 32-bit chunks.
Table 7.1
Performance of ![]() implementations on an nVidia Jetson TX-1.
implementations on an nVidia Jetson TX-1.
| Chunk | Version | Negate | Program | ||
|---|---|---|---|---|---|
| Time | Speedup | Time | Speedup | ||
| 32-bit | C | 0.097846 | 1.00 | 27.898544 | 1.00 |
| Assembly | 0.049903 | 1.96 | 27.322730 | 1.02 | |
| 64-bit | C | 0.095243 | 1.03 | 26.719709 | 1.04 |
| Assembly | 0.048488 | 2.02 | 26.492714 | 1.05 | |

The ![]() function also has a small impact on the functions that rely on it, so the overall time to run the regression tests was also reduced slightly. The 64-bit assembly version was 5% faster overall than the 32-bit C version. Because this function was not called often in the test program, the overall program speedup was modest. Implementing other functions, such as
function also has a small impact on the functions that rely on it, so the overall time to run the regression tests was also reduced slightly. The 64-bit assembly version was 5% faster overall than the 32-bit C version. Because this function was not called often in the test program, the overall program speedup was modest. Implementing other functions, such as ![]() and
and ![]() in assembly would result in much larger overall speedups.
in assembly would result in much larger overall speedups.
7.5 Chapter summary
Complement mathematics provides a method for performing all basic operations using only the complement, add, and shift operations. Addition and subtraction are fast, but multiplication and division are relatively slow. In particular, division should be avoided whenever possible. The exception to this rule is division by a power of the radix, which can be implemented as a shift. Good assembly programmers replace division by a constant c with multiplication by the reciprocal of c. They also replace the multiply instruction with a series of shifts and add or subtract operations when it makes sense to do so. These optimizations can make a big difference in performance.
Writing sections of a program in assembly can result in better performance, but it is not guaranteed. The chance of achieving significant performance improvement is increased if the following rules are used:
- 1. Only optimize the parts that really matter.
- 2. Design data structures with assembly in mind.
- 3. Use efficient algorithms and data structures.
- 4. Write the assembly code last.
- 5. Ignore the C version and write good, clean, assembly.
- 6. Reduce function calls wherever it makes sense.
- 7. Avoid unnecessary memory accesses.
- 8. Write good code. The compiler will beat poor assembly every time, but good assembly will beat the compiler every time.
Understanding the basic mathematical operations can enable the assembly programmer to work with integers of any arbitrary size with efficiency that cannot be matched by a C compiler. However, it is best to focus the assembly programming on areas where the greatest gains can be made.
Exercises
- 7.1. Multiply −90 by 105 using signed 8-bit binary multiplication to form a signed 16-bit result. Show all of your work.
- 7.2. Multiply 166 by 105 using unsigned 8-bit binary multiplication to form an unsigned 16-bit result. Show all of your work.
- 7.3. Write a section of AArch64 assembly code to multiply the value in
 by 1310 using only shift and add operations.
by 1310 using only shift and add operations. - 7.4. The following code will multiply the value in
 by a constant C. What is C?
by a constant C. What is C?

- 7.5. Show the optimally efficient instruction(s) necessary to multiply a number in register by the constant 6710.
- 7.6. Show how to divide 7810 by 610 using binary long division.
- 7.7. Demonstrate the division algorithm using a sequence of tables as shown in Section 7.3.2 to divide 15510 by 1110.
- 7.8. When dividing by a constant value, why is it desirable to have m as large as possible?
- 7.9. Modify your program from Exercise 5.13. in Chapter 5 to produce a 128-bit result, rather than a 64-bit result.
- 7.10. Modify your program from Exercise 5.13. in Chapter 5 to produce a 128-bit result, rather than a 64-bit result. How would you do this in C?
- 7.11. Write the
 function shown in Listing 7.8 in AArch64 assembly, and measure the performance improvement.
function shown in Listing 7.8 in AArch64 assembly, and measure the performance improvement. - 7.12. Write the
 function in AArch64 assembly, and measure the performance improvement.
function in AArch64 assembly, and measure the performance improvement. - 7.13. Write the
 function in AArch64 assembly, and measure the performance improvement.
function in AArch64 assembly, and measure the performance improvement.