6
Cognitive Cyber-Physical System Applications
John A.1*, Senthilkumar Mohan2 and D. Maria Manuel Vianny3
1School of Computer Science, Galgotias University, Greater Noida, India
2School of Information Technology and Engineering, Vellore Institute of Technology, Vellore, India
3Department of Computer Science and Engineering, Chitkara University, Punjab, India
Abstract
The cognitive Engineering is commonly used in the analysis, design, decision making and socio-technical system. The applications of cognitive physical system are human-robot interactions, transport management, industrial automation, health-care, agriculture etc. The main core components of cognitive system are control system, networking, IoT, data analysis, security, and information management system etc. The main properties of cognitive cyber physical system are pervasive computing, huge networking, reorganizing, degree of automation, interactions of with and without supervision. The implementation of cognitive cyber physical system having three levels such as computational model, algorithm or architecture and implementations. All the applications of cognitive physical system having these three levels for observation and communications.
In this chapter gives the brief information about various applications of cognitive cyber physical system applications and working of each application. The human and robot interaction applications applied into different fields such as industry, various automations and healthcare etc. These applications are involved in supervised mode and semi-supervised mode. In this chapter gives the supervised and unsupervised applications. The chapter consists of representation about the components, properties of cognitive cyber physical system, general working model of human robot, various applications related to cognitive cyber physical system, future direct direction and conclusion.
Keywords: Cognitive cyber-physical system, various applications, issues
6.1 Introduction
Cyber-physical system (CPS) is the combination of analog, digital, physical and human integrated using logical and physical systems. The term cyber-physical system was introduced by Lee [1]. The system provides infrastructure to provide smart services in real life environments. The CPS assembles the various phases of components in different application fields. Therefore, CPS assembly should get priority to enhance the performance of system. The traditional assembling and automatic assembling are expensive and inflexible. In this situation there is a need for more attention to flexible physical system assembly. Human–robot collaboration (HRC) is an important method to be flexible for physical assembly. In assembling, different HRCs are used in the different aspects. The HRC is a method that is not important in various assembling systems and is not a priority. The HRC with cyber-physical system has various benefits in different areas such as industrial manufacturing, healthcare, transport, etc. For example, the cyber-physical system is used to help in the design, modeling, maintenance and development of human–robot collaboration system. In the computation for HRC, an appropriate model is very important and the model is easily determined by CPS. Using the CPS, the control system of physical devices and communication system are easily made. Another form of CPS is mobile CPS, which is the system under mobility. It is the important subcategory of CPS. An example of mobile cyber-physical systems is a robotic, transport system controlled by animals or other devices [2]. The smart hand-held system is also an example of CPS. The number of reasons that supports mobile cyber-physical system is also considered as CPS. Some of the reasons are as follows:
- The computational and processing resources are having local storage.
- Multiple input and output, touch screens, CPS, light sensors are used for controlling.
- Different communication mechanisms also used such as WiFi, Bluetooth and connecting devices, etc.
- Java, C# and Java script are some of the high-level programming languages used.
- End user having recharge of battery and maintenance.
The implementation of mobile CPS utilizes mobile network connectivity to cloud environments or server. Examples for Mobile CPS are analyses and track CO2, traffic predictions measure traffic, and monitors cardiac patients. This chapter presents properties, components, collaboration with Human–Robot Collaborative Manufacturing, along with various applications such as transport, industry automation, healthcare and finally research direction of Cognitive cyber-Physical System and conclusion.
6.2 Properties of Cognitive Cyber-Physical System
Some of the main properties of CPS systems are as follows:
- Each component in the CPMS is an independent organization with cognitive skills such as perception, decision-making, communication and collaboration. Each CPS has the capacity to make decisions independently;
- Improved component and system performance in the FMS’s current intelligence and independence;
- CPMS has the capability to adapt to production changes in short and fast times
- The portability, local and central storages are the important essential services.
- Touch screen, GPS, Speakers, sensors, microphone, camera are the various input and output devices used.
- WiFi, Edge computing, 4G are the some of the devices used to communicate one device to another device.
- Various Advanced high-level programming languages are used to enable the faster development of the system such as C++, Java, C#, etc.
- Easily distributes the accessible app, such as Apple App and Google Play Store.
- Connects the multiple discrete devices into one system.
- Regular battery charging, data storage of user.
6.3 Components of Cognitive Cyber-Physical System
Different components are used in CPS. The components differ based on the different applications [3]. For example, generally the cyber-physical system has the following components such as smart grid, autonomous system, monitoring system, control system, automatic pilot system, etc. The above-mentioned components vary based on each and every application. Physical system combines the concepts of mechatronics, cybernetics, process and design. The Process control of physical system is often called built-in or embedded systems. In embedded systems, the emphasis is often on things that are designed to be minimized, and limited to the greater interaction between physical and computer components. The CPS design and communication is also similar to the Internet of Things (IoT), which shares the same IoT basic principle. However, CPS produces high-level combinations and interactions between physical and computational components. For example, are various components connected in the smart factory as shown in Figure 6.1. The various components such as handheld device, WiFi, connecting devices, RFID reader and Tag, Web and cloud storage are interconnected together.

Figure 6.1 Components of Smart Factory.
6.4 Relationship Between Cyber-Physical System for Human–Robot
Human–robot interaction (HRC) combines human activity with the help of robots [4]. The machine does not use a person, but instead combines its skills and helps it in performing difficult tasks or job. This is a main task in the manufacturing and production industry. In factories, there is no distinction between the automated and written workspaces. The humans and robots work well together, without being isolated without a safety fence.
The sophisticated industrial robot combines different precise components such as: active action object, a CPU to control, store, execute the system, and the various power sources. With the new technological advancements and industry to evolve, robotic control systems are now entering the paradigm such as Cyber-Physical Systems. The CPS compared to traditional systems such as Programmable Logic Controllers improves the use of interactive systems with one another to gain readiness, robustness, and synergy in robotic systems. HRC are applied in many fields, such as surgeons, manufacturing, elder care, rehabilitation, etc. The HRC is often applied in the execution of household and sorting tasks or used to use information provided by physical touch between a robot and or robot and a human device. Techniques for differentiating HRC include interim and intergovernmental relations with robots, agency autonomy and leader– leader relationships. Figure 6.2 shows the relationship between cyber and physical layer integration. In Figure 6.2 cyber layer components are used to take the decision and controlling purpose. The physical layer is used to interact with the real environments. The cyber layer consists of control system, task monitoring, human side control algorithm and task commands algorithms. The physical layer consists of human integration part, human robot collaboration part and robot operating system or real time controlling operating system, etc. The combining physical and cyber layer, different collaboration protocols are used. In Figure 6.2 Message Queuing Telemetry Transport (MQTT) protocol is used to collaborate both physical and cyber layers.
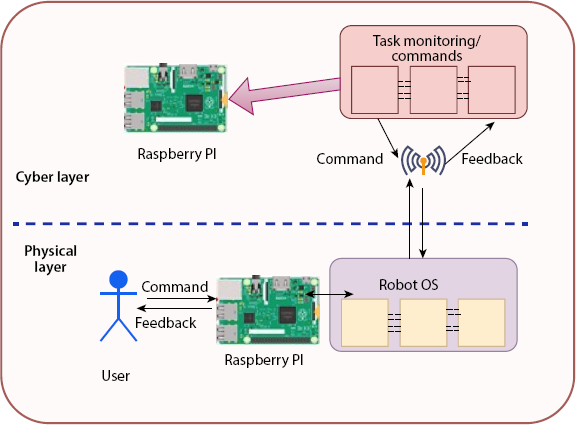
Figure 6.2 Relationship between cyber and physical layer integration.
6.5 Applications of Cognitive Cyber-Physical System
The Cognitive Cyber-Physical System is applied into different areas such as Smart manufacturing, Agriculture, Education, Energy management, Security, Environmental monitoring, Transportation systems, Process control, Smart city and home, Medical health care device, etc. In this section described various applications and working procedure of various Cognitive Cyber-Physical Systems are shown below.
6.5.1 Transportation
Smart Transportation is an important application of cyber-physical systems (CPS) and the aim of the system is addressing the scope of reduce congestion, traffic accidents, fuel consumption, reduce time of vehicle movement, and traffic safety on traffic jams. Therefore, smart transport’s role is expected to be a major contributor in the development and design of intelligence transport systems using CPS. The entire process of CPS in smart transport has communication, wireless sensor, embedded processor and sensor network that reduce the physical component activities in real traditional transport system. The CPS and its components in the cyber world reduce the traditional activities of transport system. The CPS has many physical components in transport system such as vehicles, human drivers, machinery and sensors, road side unit, transmitter and receiver and infrastructure. Some of the main features of CPS for intelligence Transport system are as follows:
- Transport CPS topology is constantly changing due to fast movement of vehicles.
- The CPS topology transportation the humans and drivers can exit or join at any place and time because of tracking and sensing of locations and services.
- The density of vehicles movements predictions depends are various situations such as rural and urban areas.
- The most previous wireless technologies are not accessed the faster movement of vehicles but using the CPS can predict and trace the faster movement of vehicles.
- Smart transport can manage the unlimited power virtually, storage, computing capabilities, manage the automotive network and wireless network movement etc.
- The CPS security applications timely forward the message in emergency situations from one node of communication to another node.
- Generally, the multimedia messages have high bandwidth compared to the normal message, but the CPS applications transfer the data easily in dynamic bandwidth.
The standard transport system that use road sides equipment model also use the CPS components as shown in Figure 6.3. The model includes three variants elements such as cars, roadside services equipment, and central locations Server. Each car has its own unique ID, Identification Number, GPS and transmitter, road side equipments (RSEs) and receiver. The RSE is also a unique identification number and the both vehicle and RSEs communicate using single on chips and wireless communication module. The moving vehicles internally communicate with RSE and make a connection with short interval of time. RSEs are connected to cloud or central server via wires or wireless transmission mode. The road side unit also collects information periodically and moves it to a central server.
6.5.2 Industrial Automation
The industrial revolution is becoming insufficient to accommodate the existing methodology and business required for more adequate technology and new business methods. The flexible, complex industries operate their business. The business people are facing different pressure related to quantity, quality, cost, customization of products and they need an effective production system. Due to these reasons they evaluate new flexible, cost effective and effective systems in real time productions and planning. The introduced new “automated collaboration” model is a main industry-backed platform and purpose is to design, operate, and develop tools and methods for detecting flexibility, flexibility, deception, network interactions enabled by the interface between new embedded devices and built-in systems. This movement coincided with the emergence of computational technology, that is, information and data processing in mechatronics, gradually changing the traditional local store into an industrial ecosystem, where the connected network systems are integrated with multiple devices and systems are rooted, as well as business partners and customers, in business processes and value interact with the physical and the logical environment. So, these physical, logical, interconnected and sensed areas are fully connected with the help of CPS.

Figure 6.3 Transport system using CPS components.

Figure 6.4 CPS Industrial interface.
For example, IMCAESOP [5] project is considered as the future generation industrial CPS methods to build modern technologies, where building is integrated into the service-oriented applications and cloud to increase the operational capabilities. The future generation CPS system integrates all the virtual components, such as hardware, connecting devices and software components. In this project both virtual components and software components are integrated together. But the service related the service in physical devices on CPS, service in network on CPS, other services such as outside of the cloud and storage in CPS are all separated layer wise. These three combinations of application program interface enable CPS to change its abilities and both provide third parties and use services that represent their virtual environment. Such flexibility serves as the enabler of the most flexible and complex CPS in various industrial applications. The various parts of CPS in industries are shown in Figure 6.4. In Figure 6.4 three layers are interfaced together as physical parts such as sensors and control system, the storages part in cloud and interaction part such as mobile applications, monitoring and management. With the help of these three CPS interface easily manages the business.
6.5.3 Healthcare and Biomedical
The CPS method for healthcare is proposed, the method classified into computation, communication and control. The system monitors continuously the patient’s health attributes like a heartbeat, blood pressure, glucose, etc., and if health parameter reaches the critical value the patients must be treated with the remedial measure. This method decreases the cost and time complexity [1]. CPS with a closed-loop system is proposed for various areas like robotics, flight system and many more. However, health research is lacking until now, with dynamic computational techniques for health. CPS in the medical and health domain is lacking the high-resolution information in predictive and outcome attributes in the real natural environment. mHealth (mobile health) is introduced for an emerging opening to develop the CPS for mobile [2]. CPS–IoT (Internet of Things) with health-care services improves the quality of human life. The attacker tries to make vulnerable in the various emerging cyber-attacks. The security specialists keep on finding ways to recover and prevent sophisticated attack methods. The cognitive cyber-security framework is proposed for human behavior and responds to privacy threats [3]. The combination of physical entities and computational elements interact with humans during many modalities. The various security attacks like forest, along with featured selection introduced the feature augmentation technique. The privacy-preserving of the raw information, the FA-RF approach, significantly minimizes the communication delay forced on the network as computation and communication of the cloud is removed [6].
The telemonitoring issue with high-risk pregnancy women’s in the home is proposed, with few design problems during the monitoring being listed out. The MCPS technique is considered for various issues like support for caretakers’ easy maintenance, smart altering, automation of medical work-flow, plug &play model, medical devices interoperability, etc. The telecare method consists of two networks namely BAN (BODY Area Network) and PAN (Personal Area Network). The telemedical system becomes dependable during the deployment, which provides huge community value to high-risk pregnant women, particularly those living the dispersed rural areas [8]. Stroke is affecting the brain and results in death within a few hours. Stroke is one of the dangerous and fatal diseases, which can be avoided by finding the stoke nature and react promptly by using the intelligent health system. CPS is used to find out the presence of stroke in the patients, the person having the stroke with high risk or low risk with survival rate. The data from CPS communicates to the doctor and alerts the current patient situation. The system works and entirely depends on data acquired from the sensor of electroencephalography from the patient’s brain [9]. The general ECG connection using CPS is shown in Figure 6.5. This interface has analog circuit, digital block, wireless receiver and LED simulator as shown in Figure 6.5.

Figure 6.5 ECG Connection Interface using CPS.
The major challenge in the biomedical CPS is combining the physical system with neuroscience and assisting with human disabilities. EEG (Electroencephalography) is the non-invasive technique to provide the assistive method by brain electrical signals. The unique prototype of hybrid BCI (brain–computer interface) is proposed, the combination of mental task classification and SSVEP (steady-state visual evoked potential) used to detect with EEG channels. The microcontroller with the sensor of wireless EEG combined enhances the convenience, portability, effectiveness of the cost. The results compared with normal humans with tetraplegia patients, the neural network classification with BCI accuracy of 74% and data transfer rate 27 bits per minute [7].
6.5.4 Clinical Infrastructure
Virtualization and cloud computing become the most widely used in software deployment, storing various types of data, computations on complex problems and streaming of real-time audio and video. Many organizations migrate to server-based solutions due to the advantage of scalability and cost-efficiency with the applications running from the server in the cloud computing environment. The CPS performs the task based on the request received from the local actuator with a given deadline. The medical CPS device keeps on monitoring the patient’s condition and chance to recover from the erroneous state, effective utilization of resources, cost-effective is the most ultimate plan to perform the medical CPS healthcare IT environment. Cloud service with private service results to fairly sharing of the resources, to execute the medical CPS applications. Novel middle-ware method with an effective virtual resource sharing method stimulated with autonomic computing [10]. The medical domain becomes effective digitally day by day, improves effectively and efficiently. The doctors easily access the data and give their suggestions most expediently. The medical CPS towards the new technologies like, eye trackers, networked head-mounted displays (HMDs), give rise to new communication medium chances [11]. The MCPS which enables the future generation of eHealth systems is planned to interoperate safely, efficiently and secured way. The safety-critical devices interconnected perform the analysis of the patient’s health information, with the treatment procedure to be followed by medical staff and doctors cost-effectively. The integrated clinical environment is a trivial solution towards promoting medical devices in a heterogeneous environment. The novel architecture ICE ++ is proposed along with mobile edge computing which combines NFV and SDN methods to make automatic and more effective [12].
CPS deployed in various industries based on considerable success stories. The implementation of CPS in the limited hospital feature is due to various reasons. Clinical operation and patient safety are the most critical considerations in health outcomes. CPS with Houston Methodist Hospital discusses various challenges and difficulties during success. The agile development of CPS interacts with computational scientists and clinicians [13]. Hospital-acquired infections (HAI) are the various infections effects from healthcare staff, patients, doctors and many more in the environment. HAI is the major problem that results in increasing the mortality rate and the economic condition of the hospital becomes more burdensome. The software perspective of the innovations for business with CPS is implemented in the European Union research funded research project. The major aim is to make automation of the monitoring activities and clinical workflows combined, which results in more than 90% of infections in the hospitals [14]. The structure of clinical infrastructure is shown in Figure 6.6. All the components of clinical infrastructure are interconnected using CPS.

Figure 6.6 Clinical infrastructure using CPS.
The CyPhyS+ introduced low-cost and standard CPS for old age homes which used remote health monitoring. 6LoWPAN is the end-toend healthcare system, which is more secure and reliable during the data acquisition process. The method is designed to work on low energy operations and resource restriction environments. The results ensured that CyPhyS+ is more robust and has minimal energy usage and SNMP based monitoring performance. The proposed method incorporated with CBCMAC,128 bit AES based on security encryption authentication schemes used [15]. In the last couple of years, medical specialists have been working towards the improvement of the treatment technique to increase the speed and reduce the treatment activities of the pain. CPS plays a potential role in monitoring and improves the quality of patients’ life. Automation of the process and continuously monitoring of the patient’s condition is based on that treatment required to perform automation various medical devices required. The proposed system finds out the root cause of the disease, researches on new disease nd existing disease treatment procedure and available information in the centralized CPS [16].
6.5.5 Agriculture
Industry 4.0 is promoted to the transformation of farming into future generation and precision agriculture. The advanced CPS and intelligent inventions are used in agriculture to improve the production of the crop. Optimization, real-time sensing, control techniques are used to perform testing the soil crop health and automation of the advanced cyber-physical tools. SeDS (Sensor-Drone-Satellite) is proposed to farming activities and the sustainability of corresponding objectives. The artificial neural networks techniques proposed to achieve the optimal solutions are used effectively support the early stage of research. The farmers and growers used SeDS for decision making which enables the information in shared environment [17]. The diagrammatic representation of agriculture interface using CPS is shown in Figure 6.7.
The growth of alfalfa based on the fertilizer, water regulation is not accurate based on the conditions which fail to track the growth. The precision regulation based on ACPS is proposed, for fertilization, water irrigation to the alfalfa, namely (PRMWFA-ACPS). The proposed model includes the biophysical sub-model, where the computation used checks the condition of the plant. The simulations carried out depend on the PRMWFA-ACPS with Ptolemy [18]. The CPS-based framework and workflow of the greenhouse with agriculture proposed, is named MDR (Monitoring detecting responding). MDR-CPS is designed for various activities like monitoring, responding, detecting based on the different types of stress. Collaborative control theory with MDR-CPS to deploy is based on the collaborative requirement planning to address the errors with CPS [19]. The novel method for climate-smart agriculture for CPS (ACPS) is introduced with farming precision. The main objective is to find out the fault location and tracking the field by applying multivariate data. The classification method combines location with classifiers of the node, novel hybrid classification is proposed. The proposed system detects the irrigation, soil conditions, and nutrients by using the sensor data along with location prediction [22].

Figure 6.7 Agriculture interface using CPS.
ACPS is introduced for the management of various activities and services in agriculture precision. The new method SPVWS (solar photovoltaic water system) is proposed for remote management of irrigation. The ACPS is designed to the extent and adopts the solar irrigation feature typically. The client–server architecture distributed in fashion by the vertex becomes a more active platform that guarantees the communication between the supervisory level in the cloud, the operational level with greenhouse deployment. The cloud environment incorporates various microservices performing the analysis with data mining to support the control tasks remotely [20]. The CCP-CPS (Collaborative Control Protocol for Robotic and Cyber-Physical System) is proposed for smart and agriculture precision which monitors and finds the stresses in the crop present in the greenhouses. Collaborative Control Theory is used in two ways, agent and protocol levels. The simulation results identify the location of crops with the highest number in the greenhouse, effective utilization resources and finally, stress situation quick and capability of the tolerance level. The human integration with the cyber augmented system greenhouse is used for monitoring systems [21].
6.6 Case Study: Road Management System Using CPS
The CPS is the combination of different technologies such Information and Communication Technology (ICT), Internet of Things (IoT), Industrial Internet and Networked Control Systems (NCS). Let us discuss the case study on smart accident management system in the traffic full road and home automation with smart home device management system. Technically speaking, CPS is the best implementation environment and widely used since it has rich application interface and easy management design for any automation applications such as road accident management, home device automaton, border security system, video surveillance system, etc.
6.6.1 Smart Accident Response System for Indian City
In view with road accident in India, there are countless accidents that have been happening nowadays as population are increasing in metro capital cities like Delhi, Mumbai, Chennai, Calcutta and Bangalore. The World Health Organization (WHO) report of 2018 says that almost 1.35 million people have died in road accidents and in India more than 150,000 people have died and it will increased if precaution is not proposed by means of awareness about accident with general public and smart automation remedies by quick arrival of ambulance and other medical remedies at places where the incidents happened. Adopting the smart accident response system is inevitable which is also a quick remedial action now and for the future. The smart city’s IoT-based applications has been discussed.
Technical Terminologies for Smart Road Accident Response System
Technically discussing, the CPS components can be adopted in Indian traffic with Radio Frequency Identification (RFID) [12] and Zigbee-oriented Bluetooth technology for smart personal Area Network to serve quickly with error-free communication. The applications of RFID have been discussed with Ref. [13] for various smart automation applications and technical overcomes and challenges. RFID is the most suitable tag that can fit in each vehicle and can be easily categorized according to vehicle type. Later categories of vehicles will be prioritized to sort the vehicle for situation response. For example, suppose an accident happened at particular place and traffic is more on the road. The smart system accident response system insists the on-road traffic to identity and keeps the path for ambulance. This way it highly keeps way to ambulance and also it helps the ambulance to reach the hospital on time.
The Zigbee is the highly preferable technology for short distance communication among VANET Networks which could be adopted to create smart accident response system. The communication sectors include nearby traffic police, ambulance services and emergency medicine service. The Zigbee technology is working with delivering 256 Kbps data transfer and it is widely adopted for VANET. The IoT technology has been adopted in applications like smart ambulance service, sensitive information management system, and smart road traffic management system and so on. The various components of CPS are interconnected as shown in Figure 6.8. In Figure 6.8 internet, infrastructure, mobility, vehicles are fully interconnected together.

Figure 6.8 Road management using CPS.
Road Side Unit (RSU), Vehicle to Vehicle communication and vehicle to RSU communication. The factor influencing energy efficient communications are on board sensors, power and storage availability, dynamic topology, intermittent connectivity, mobility pattern.
In CPS on board sensors are the major sensitive components which are able to communicate with neighbor vehicle’s board sensors. It transmits necessary data information over wireless communication. Since the nodes are dynamic with respect to other nodes, the data transmission might be having distance issue and which leads to more power consumption. On other hand the amount of data is transmitted and receiving is highly unpredictable. In that case dynamic nodes should have consistence power and storage. The major challenge in managing the CPS is the dynamism of nodes. Vehicles are moving with respect to destination based on the other nodes (vehicles) movement. The dynamism of network is there frequently. Managing network topology is a challengeable one. Intermittent connectivity is the movement of nodes and its data transmission are unpredictable, and at times sudden disconnection are possible even frequently. Again, disconnected data transmission must be resumed necessarily then and there. Mobility pattern, the mobility nodes and its speed can be predicted with respect to road type, size of vehicle, road condition and so on. IoT with CPS in Intelligence road network improves traffic flow, road safety security and reduces crime response time to incidents, traveler’s information, public transport, improves traffic flow, accurately improving the environment and information sharing from vehicle. IoT with CPS in Intelligence in VANET improves accident prediction, future data prediction, Vehicle collusion prediction, etc. IoT with CPS promotes smart cities energy management, parking management and future data prediction in parking management, service management, information sharing from customer to customer through vehicle.
6.7 Conclusion
The cognitive cyber-physical system is commonly used in different applications. The core components of CPS layers are used in different purposes. Generally, the layers are used in analysis, design, decision making and sociotechnical system. The applications of cognitive physical system are human–robot interactions, transport management, industrial automation, healthcare, agriculture, etc. In all the applications human individual interactions and group behavior are important. The main core components of cognitive system are control system, networking, IoT, data analysis, security, information management system, etc. The main properties of cognitive cyber physical system are pervasive computing, huge networking, reorganizing, degree of automation, interactions of with and without supervision. The implementation of cognitive cyber-physical system has three levels such as computational model, algorithm or architecture and implementations. Each application of CPS has different challenges and design issues. This challenge differs based on the different applications. Each application of physical and cyber components have different design issues. The various design challenges across all the abstraction, layers and architecture. Some of the design and operation challenges are energy management, fault detection, resource management, human interaction, etc. The implementation side of the CPS cost is also one of the main issues in real environments. The future work, plans for cost analysis and develops a system for performing multiple operating modes for different applications.
References
1. Lee, E.A., Cyber-Physical System: Design Challenges. 2008 11th IEEE International Symposium on Object and Component-Oriented Real-Time Distributed Computing (ISORC), Orlando, FL, pp. 363–369, 2008.
2. Marwedel, P. and Engel, M., Efficient computing in cyber-physical systems. 2012 International Conference on Embedded Computer Systems (SAMOS), Samos, pp. 328–332, 2012.
3. Guan, X., Yang, B., Chen, C., Dai, W., Wang, Y., A comprehensive overview of cyber-physical systems: from perspective of feedback system. IEEE/CAA J. Autom. Sin., 3, 1, 1–14, 2016.
4. Minartz, T., Ludwig, T., Knobloch, M., Mohr, B., Managing hardware power saving modes for high performance computing. 2011 International Green Computing Conference and Workshops, Orlando, FL, pp. 1–8, 2011.
5. Colombo, A.W. and Bangemann, T., IMC-AESOP outcomes: Paving the way to collaborative manufacturing systems. 12th IEEE International Conference on Industrial Informatics (INDIN), 2014.
6. Monisha, K. and Rajasekhara, B.M., A Novel Framework for Healthcare Monitoring System Through Cyber-Physical System, in: Internet of Things and Personalized Healthcare Systems, SpringerBriefs in Applied Sciences and Technology, Springer, Singapore, 2019.
7. Nilsen, W. et al., Modeling Opportunities in mHealth Cyber-Physical Systems, in: Mobile Health, J. Rehg, S. Murphy, S. Kumar (Eds.), Springer, Cham, 2017.
8. Abie, H., Cognitive Cybersecurity for CPS-IoT Enabled Healthcare Ecosystems. 2019 13th International Symposium on Medical Information and Communication Technology (ISMICT), Oslo, Norway, pp. 1–6, 2019.
9. Reddy, Y.B., Cloud-Based Cyber Physical Systems: Design Challenges and Security Needs. 2014 10th International Conference on Mobile Ad-hoc and Sensor Networks, Maui, HI, pp. 315–322, 2014.
10. Gu, L., Zeng, D., Guo, S., Barnawi, A., Xiang, Y., Cost Efficient Resource Management in Fog Computing Supported Medical Cyber-Physical System. IEEE Trans. Emerging Top. Comput., 5, 1, 108–119, Jan.–March 2017.
11. Mowla, N.I., Doh, I., Chae, K., On-Device AI-Based Cognitive Detection of Bio-Modality Spoofing in Medical Cyber Physical System. IEEE Access, 7, 2126–2137, 2019.
12. Chai, R., Naik, G.R., Ling, S.H. et al., Hybrid brain–computer interface for biomedical cyber-physical system application using wireless embedded EEG systems. BioMed Eng. OnLine, 16, 5, 2017.
13. Jezewski, J., Pawlak, A., Horoba, K., Wrobel, J., Czabanski, R., Jezewski, M., Selected design issues of the medical cyber-physical system for telemonitoring pregnancy at home. Microprocessors Microsyst., 46, Part A, 35–43, 2016.
14. Laghari, A., Memon, Z.A., Ullah, S., Hussain, I., Cyber Physical System for Stroke Detection. IEEE Access, 6, 37444–37453, 2018.
15. Ahn, Y.W. and Cheng, A.M.K., Automatic Resource Scaling for Medical Cyber-Physical Systems Running in Private Cloud Computing Architecture. 5th Workshop on Medical Cyber-Physical Systems, vol. 36, Schloss Dagstuhl– Leibniz-Zentrum fuer Informatik, pp. 58–65, 2014.
16. Sonntag, D., Zillner, S., Schulz, C., Weber, M., Toyama, T., Towards Medical Cyber-Physical Systems: Multimodal Augmented Reality for Doctors and Knowledge Discovery about Patients, in: Design, User Experience, and Usability. User Experience in Novel Technological Environments. DUXU 2013. Lecture Notes in Computer Science, vol. 8014, A. Marcus (Ed.), Springer, Berlin, Heidelberg, 2013.
17. Celdrán, A.H., García Clemente, F.J., Weimer, J., Lee, I., ICE++: Improving Security, QoS, and High Availability of Medical Cyber-Physical Systems through Mobile Edge Computing. 2018 IEEE 20th International Conference on e-Health Networking, Applications and Services (Healthcom), Ostrava, pp. 1–8, 2018.
18. Joerger, G., Rambourg, J., Gaspard-Boulinc, H., Conversy, S., Bass, B.L., Dunkin, B.J., Garbey, M., A Cyber-Physical System to Improve the Management of a Large Suite of Operating Rooms. ACM Trans. Cyber-Phys. Syst., 2, 4, Article 34 (September 2018), 24 pages, 2018.
19. Bocicor, M.I., Molnar, A.-J., Taslitchi, C., Preventing Hospital Acquired Infections through a Workflow-Based Cyber-Physical System. Proceedings of the 11th International Conference on Evaluation of Novel Software Approaches to Software Engineering, n. pag. Crossref. Web, 2016.
20. Dagale, H. et al., CyPhyS+: A Reliable and Managed Cyber-Physical System for Old-Age Home Healthcare over a 6LoWPAN Using Wearable Motes. 2015 IEEE International Conference on Services Computing, New York, NY, pp. 309–316, 2015.
21. Sultanovs, E., Skorobogatjko, A., Romanovs, A., Centralized healthcare cyber-physical system’s architecture development. 2016 57th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), Riga, pp. 1–6, 2016.
22. Mirkouei, A., A Cyber-Physical Analyzer System for Precision Agriculture. J. Environ. Sci. Curr. Res., 3, 016, 2020.
23. Liu, R., Zhang, Y., Ge, Y., Hu, W., Sha, B., Precision Regulation Model of Water and Fertilizer for Alfalfa Based on Agriculture Cyber-Physical System. IEEE Access, 8, 38501–38516, 2020.
24. Guo, P., Dusadeerungsikul, P.O., Nof, S.Y., Agricultural cyber physical system collaboration for greenhouse stress management. Comput. Electron. Agr., 150, 439–454, 2018.
25. Selmani, A., Oubehar, H., Outanoute, M., Ed-Dahhak, A., Guerbaoui, M., Lachhab, A., Bouchikhi, B., Agricultural cyber-physical system enabled for remote management of solar-powered precision irrigation. Biosyst. Eng., 177, 18–30, 2019.
26. Dusadeerungsikul, P.O., Nof, S.Y., Bechar, A., Tao, Y., Collaborative Control Protocol for Agricultural Cyber-physical System. Procedia Manuf., 39, 235– 242, 2019.
27. Pandey, A., Tiwary, P., Kumar, S., Das, S.K., A hybrid classifier approach to multivariate sensor data for climate smart agriculture cyber-physical systems, in: Proceedings of the 20th International Conference on Distributed Computing and Networking (ICDCN ‘19), Association for Computing Machinery, New York, NY, USA, pp. 337–341, 2019.
*Corresponding author: [email protected]