
All FLL robots must be built entirely of LEGO parts, a limitation that makes it easier to build a competitive robot, because all teams use the same starting materials. Using LEGO parts to build the skeletons of robots is very easy compared to other systems (such as Vex) because there’s no need to cut pieces to size, weld, and fit parts together.
When building robots to compete in FLL, the LEGO MINDSTORMS robotics system acts as the basis for robots. MINDSTORMS is a department of LEGO that makes child-friendly robot equipment. You can learn more about it at http://www.mindstorms.com/. The MINDSTORMS system is powerful yet simple: You don’t need to know anything about circuits, hardwiring, or advanced programming to build a robot with it. You won’t have to weld or solder either; things pretty much snap together, which is the point. This is the first step in the FIRST series of competitions; you’ll have the chance to cut and weld later on in the FIRST Robotics Competition.
MINDSTORMS sensors and motors connect to a microcomputer via cables with standard connectors. The microcomputer acts as the robot’s brain by receiving information from sensors, performing calculations, and controlling motors. It can be programmed using a graphical user interface and child-friendly language.
LEGO MINDSTORMS now includes two robot systems: the older Robotics Invention System (RIS) and the newer NXT, either of which you can use in the competition.
In this chapter, we discuss and compare each system. If you already know which system you’re using, you might choose to skip ahead or quickly run through this chapter to review the components of your system.
The RIS was the first system used in FLL and was the only available option for many years. RIS components consist of electrical parts and construction pieces. The electrical parts include a microcomputer (called the RCX), sensors, and motors.
Note
As an interesting trivia fact, RCX stands for Robotic Command Explorer.
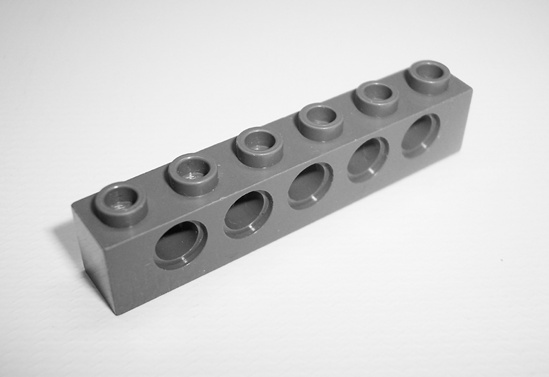
There are four types of sensors: touch, light, rotation, and temperature. The construction pieces can consist of any LEGO parts, but the electrical parts are mechanically designed to work most naturally with a mix of TECHNIC bricks and pieces such as pegs and gears. TECHNIC pieces are more advanced pieces that help build more complex creations (like robots!). Figure 9-1 shows an example of a TECHNIC brick.
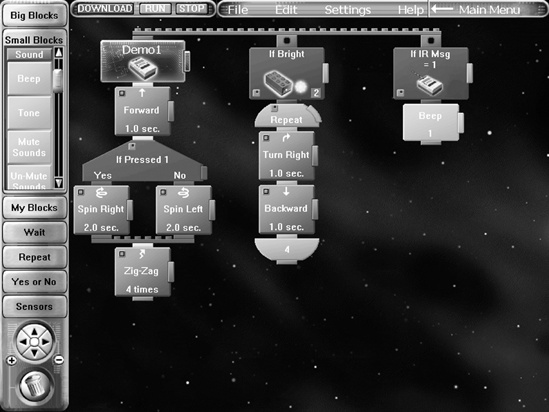
The RIS includes a graphical programming language called RCX Code. To program, a user connects several command “blocks” to form a program. For example, if a user wants to program a robot to move forward and then backward, he might connect a Forward block to a Backward block. Programs can be downloaded to an RCX via an infrared transmitter. Figure 9-2 shows an example of a program made using RCX Code.
The NXT system was released as an update to the RIS in 2006, and FLL has used it since the Nano Quest season. The NXT’s counterpart to the RCX is the NXT Brick, which is the microcomputer that acts as the robot’s brain.
The NXT Brick works similarly to the RCX, but it has additional features and functionality. One significant added feature is the ability of NXT Bricks to communicate via Bluetooth with each other or with computers. Another addition is the ability to download programs using a USB cable.
The NXT system also includes new electrical parts such as redesigned Light and Touch Sensors, as well as new Sound and Ultrasonic Sensors.
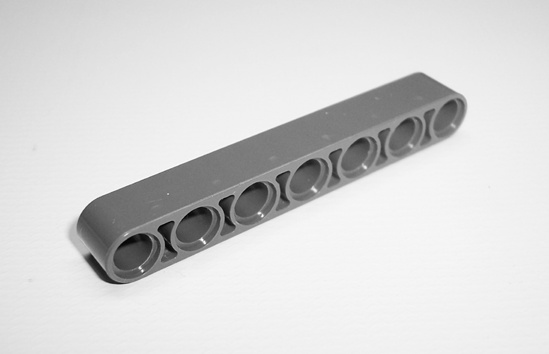
As with the RIS, the NXT system is compatible with all LEGO pieces. However, the NXT’s electrical parts are designed to work most naturally with studless building pieces. These don’t have those little round “bumps,” called studs, that you see on LEGO bricks. They include pieces such as TECHNIC beams, gears, pegs, and so on. Figure 9-3 shows an example of a TECHNIC beam.
The official programming language for the NXT system is called NXT-G. Like RCX Code, it’s a graphical language that uses drag-and-drop command blocks. However, unlike RCX Code, NXT-G has a different interface and additional capabilities that allow the use of new electrical parts in programs. This brings us to a basic question: Which one should you use—the RIS or the NXT? The answer is not straightforward, so the following sections compare many of the main attributes of RIS and NXT.
Both the RIS and NXT microcomputers have input ports for connecting sensors and output ports for connecting motors. They also have buttons and display screens that allow users to interact with the microcomputer. Both microcomputers can be programmed to control a robot’s behavior by turning motors on and off, receiving and acting on sensor data, performing calculations, and so on.
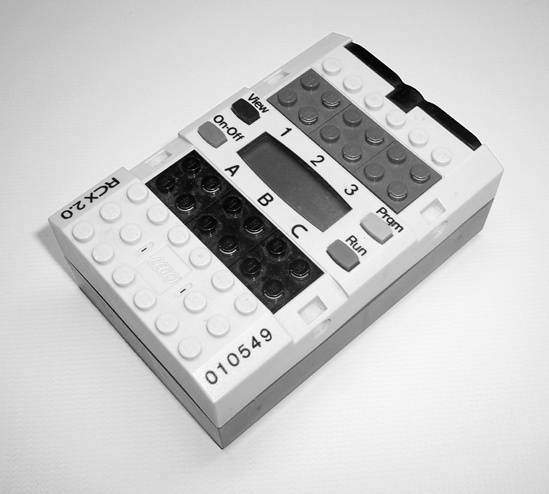
Figure 9-4 shows an RCX, the microcomputer for the RIS. It has three input ports and three output ports. The input ports are numbered 1 through 3, while the output ports are lettered A through C. The RCX screen displays basic information such as a program number and data from a sensor.
There are four buttons on the RCX: On/Off, Run, Prgm, and View. The On/Off button turns the RCX on or off; the Prgm button switches between available programs; Run starts the selected program; and the View button causes the screen to display data from a port (each time you press View, the screen displays data from the next port).
A basic speaker on the RCX plays simple tones. Infrared transceivers on the RCX allow it to communicate with computers and other RCXs.
The RCX has plenty of memory for the purposes of FLL, so you shouldn’t have any problem downloading programs to control your robots. However, each RCX holds a maximum of five programs, regardless of the amount of memory in use.
Figure 9-5 shows the NXT’s microcomputer, the NXT Brick. It has four input ports and three output ports (numbered 1 through 4 and A through C); one more input port than the RCX.
The NXT port connections differ from those on the RCX; they look more like phone jacks.

The display screen on an NXT Brick is significantly more powerful than that of an RCX. It’s quite a bit bigger and can display a menu of available programs, pictures, drawings, sound files, and much more. You can even create basic programs right on a Brick, using only this menu!
The NXT Brick has four buttons. A square orange button in the center serves as the On, Enter, and Run button. Use this button to turn the robot on, enter a folder on the menu, and run programs. The rectangular gray button beneath the center button acts as a Clear, Cancel, and Back button. Use it to go back in the menu, stop a program, or clear an entry. Two gray arrow keys, one pointing left and the other pointing right, allow you to switch between selections in the menu. You can also program the Enter and arrow buttons to act as touch sensors in programs.
The NXT Brick’s Bluetooth capability allows it to communicate over a much greater distance than an RCX. For example, using Bluetooth enables you to download a program from your computer to a Brick that’s on a different floor!
The speakers in NXT Bricks are also more advanced than those in RCX and can play speech or sound effects in addition to simple tones.
Although users can install more than five programs on an NXT Brick, the Brick’s memory is somewhat small; it’s easy to go over the limit if you use several large programs and/or sound files.
Both NXT and RCX microcomputers can use six AA batteries as a power source. However, NXT Bricks can also use a special lithium rechargeable battery pack made by LEGO. This battery pack snaps into the Brick, and you can use a transformer cable to recharge it even when it’s in the Brick.
The addition of this rechargeable battery pack can be a big advantage in FLL, because it enables teams to easily recharge their robots and keep a consistent battery level for each match. This can be important, because robots usually act differently when their battery levels change. It’s harder to keep a consistent battery level with AA batteries, because you must exchange them frequently to keep a high charge level when practicing.
A robot’s sensors are its only source of information about its environment. Although the sensors for RIS and NXT have some similarities, they also have some big differences.
The RIS has four sensors, as shown in Figure 9-6. Touch Sensors are the simplest and can detect a button on the sensor being pressed, released, or bumped. Light Sensors measure the amount of light in their surroundings. The reflected light of an LED on each Light Sensor can be detected by the sensor (this LED is always on when the sensor is used in a program).
Rotation Sensors can be connected to axles and measure how much they rotate. For example, if you were to turn an axle in a Rotation Sensor all the way around, the sensor would measure one rotation. Rotation Sensors are accurate to sixteenths of a rotation.
Finally, Temperature Sensors measure the temperature of their surroundings. They are not allowed in FLL.
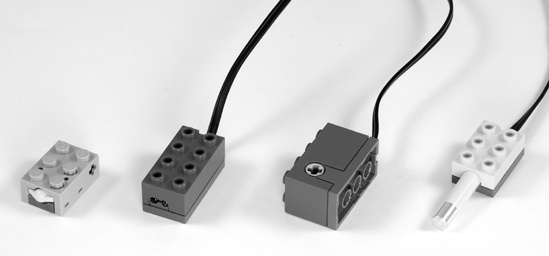
Although NXT robots can work with all RIS sensors using special converter cables, the NXT system includes its own sensors. The redesigned Touch and Light Sensors, as well as new Sound and Ultrasonic Sensors, are shown in Figure 9-7.

The NXT’s Touch Sensor has the same functions as the RIS sensor, but it’s bigger and it looks different. The NXT’s Light Sensor is larger than its RIS counterpart, but it has almost the same functions, except that you can turn off its LED. The increased size of the NXT sensors is generally considered a disadvantage, because it’s harder to fit them into small areas.
Although the NXT system doesn’t include separate Rotation Sensors, its motors have built-in Rotation Sensors. These sensors allow you to directly measure the rotations of any NXT motors you use, which can be a big advantage in FLL. Better still, these sensors are accurate to one three-hundred-and-sixtieth of a rotation!
The Sound Sensor measures the volume of sound in its surroundings. However, like the RIS Temperature Sensor, the Sound Sensor has no practical use in FLL and isn’t allowed on FLL robots.
On the other hand, the NXT’s Ultrasonic Sensor can be quite useful. It uses sonar to measure the distance between it and the closest object in range. This is useful for both avoiding and finding objects (such as mission models).
NXT and RIS motors differ both in appearance and performance. RIS motors are significantly smaller than NXT motors. This is generally considered an advantage in FLL, since it allows for smaller robots and lets the motors fit into smaller areas. However, the increased size and weight can come in handy for balancing weight properly or for using motors as the “foundation” of a robot (as discussed in Chapter 10).
RIS motors can rotate faster than NXT motors (when they aren’t driving anything). However, NXT motors are much more powerful, enabling you to use gears to make an NXT motor drive something faster and with more power.
As mentioned earlier, the RIS and the NXT are designed to work with different construction pieces, one with studs and one without. While there are similarities between the elements (they’re all LEGO, after all), there are also some major differences.
The RIS was designed to work best with a mix of TECHNIC bricks and pieces such as pegs, axles, and gears. Figure 9-8 shows examples of some of the pieces commonly used in RIS robots.
Building with this construction system is somewhat similar to building with regular LEGO pieces, which may make it easier to build robots if you’re new to LEGO TECHNIC. However, this system also has a couple of downsides. For example, it can be hard to connect pieces at oblique angles, and it can be difficult to build strong constructions.
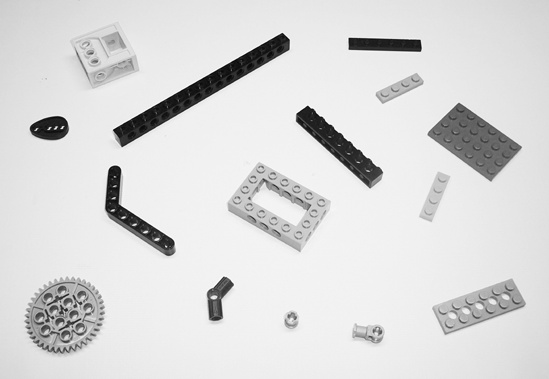
The NXT construction system uses mostly studless pieces, as shown in Figure 9-9.

The lack of brick and brick-like pieces in the NXT construction system, and the fact that its pieces are usually connected by pegs and axles instead of studs, may be hard to get used to. However, once you have a little experience with this method, you may find it easier to build robots with this system. The pieces seem to be better designed for allowing irregular angles in designs and for fitting gears and electrical parts in tight positions. They’re also better suited for creating strong designs, and they work well with bracing (as discussed in Chapter 10).
Each system has one or more base kits, which you can think of as “starter kits.” These kits include a microcomputer, motors, sensors, connector cables, construction pieces, and instructions for building several starter robots. Some base kits also include programming software. Although you aren’t required to, you’ll probably want to get a base kit instead of trying to get all the pieces you need through accessory kits.
The latest version of the Robotics Invention System base kit (RIS 2.0) includes the following electrical parts:
There are about 700 construction pieces in the kit, consisting of TECHNIC bricks, gears, pegs, several kinds of wheels (including treads), and much more. The kit also includes programming software (RCX Code) and an infrared transceiver for downloading programs to robots.
How well does this set cover the needed pieces for your robot? Well, there’s a good chance you’ll need another motor for your FLL robot. You might also want some other sensors, such as Rotation Sensors. However, the building pieces will probably be fairly adequate.
The NXT system has two base kits: the Retail and Education Kits. Both kits sell for about $250.00.
The Retail Kit (sold by LEGO Shop at Home at http://shop.lego.com/ and other retailers) includes the following electrical parts:
1 NXT Brick
3 motors
1 Ultrasonic Sensor
1 Light Sensor
1 Sound Sensor
1 Touch Sensor
7 connector cables
This kit has over 500 construction pieces, consisting of studless beams, gears, pegs, axles, and more. Only four wheels are included (while the RIS 2.0 base kit has 20). The kit also includes the NXT-G programming software and a USB cable for downloading programs to the NXT.
The Education Kit is sold by LEGO Education (http://www.legoeducation.com/). It includes more electrical parts than the Retail Kit: an extra Touch Sensor, three LEGO lamps, a lithium battery, and three converter cables. However, it has fewer construction pieces—about 430 pieces compared to the Retail Kit’s 500, and many of them aren’t as useful for robots. The Education Kit does not include the NXT-G programming software, which you can buy separately from LEGO Education for about $70.00.
Both the Retail and Education Kits provide a good amount of electrical parts for FLL robots. FLL allows a maximum of three motors on any one robot, and you probably won’t need any extra Rotation Sensors, since each motor has one. However, if you get the Education Kit, you may want some extra construction pieces. Also, both kits come with only one or two kinds of wheels, so you may want to get other wheels depending on your robot’s needs.
One important factor to consider when choosing between the RIS and the NXT systems is the availability of each. Since the NXT replaces the RIS (and is not just an addition), it may be harder to purchase an RIS.
As of this writing, LEGO no longer sells RIS base kits, although LEGO Education will sell accessory packs through 2009. However, you may well be able to purchase RIS products through third parties, such as eBay (http://www.ebay.com/) and BrickLink (http://www.bricklink.com/).
The NXT is readily available from LEGO and other retailers. LEGO also sells many accessories and individual parts, so you shouldn’t have any trouble getting the right parts. Also, FLL offers (for a price) an NXT robot set to teams when they register, but not an RIS set.
Now that we’ve compared the two systems, let’s look at the overall picture. As previously discussed, the RIS seems to have advantages over the NXT in the size of electrical parts and the fairness bonus given to teams that use it. One could also argue that the construction system for the RIS is easier to use, but that’s more a matter of taste and experience. The NXT, on the other hand, has a more powerful and versatile microcomputer, a more reliable battery source, a larger and more advanced sensor capability, a stronger motor performance, and a much wider availability.
The advantages of the NXT’s battery source and sensors are especially significant. For example, the rechargeable battery pack makes it much easier to keep your robot at a consistent, full battery level, which can greatly enhance its performance. Also, while the RIS Rotation Sensor is only accurate to sixteenths of a rotation, the NXT sensor is accurate to one three-hundred-and-sixtieth of a rotation. This accuracy enables high precision in simple movements, which can be a great advantage in the Robot Game. And since the NXT Rotation Sensors are built into motors, the programming software can use them to keep a robot moving straight automatically by making sure two motors turn at the same speed.
The NXT’s stronger motor performance is another great advantage. Even though you might not need the increased power, you can use it to give your robot extra speed to finish missions more quickly.
Another advantage (at least to many teams) pertains to the sturdiness of NXT robots. Because they use pins and axles to connect parts, when compared with RIS-based robots, NXT robots are frequently more lightweight with parts that are less likely to fall off. Many teams who have built RIS robots can recount stories of robots losing pieces on the mat or entire robots shattering after falling just a few feet. Studless building has an inherent strength built into the parts and connection methods that RIS lacks.
One advantage that the RIS does seem to have over the NXT is that it can easily be connected to almost all LEGO brick-like parts. It can be hard to merge TECHNIC beams with regular brick-like pieces, but there’s a real advantage in being able to use a wide selection of available brick-like parts (compared with fewer studless parts). Many teams come to FLL with an already large collection of brick-like parts, which can make building RIS robots much simpler.
Remember that the factors discussed in this chapter aren’t the only ones to consider. For example, you may have much more experience with one system than the other. Also, the price of each system might influence your decision. Maybe you already have one system and don’t want to spend the time and money to switch to the other. You’ll want to take factors like these into account besides the ones discussed in this chapter.