
Appendix 2
Evaluation of the Chebyshev Center of a Set of Points in the Euclidean Space
The Chebyshev center of a set is defined in section 1.8.2 in Chapter 1 (see Definition 1.2). To find the Chebyshev center of a finite set ![]()
![]() is to minimize
is to minimize ![]() over
over ![]() . Note that the criterion function
. Note that the criterion function ![]() and its square are convex.
and its square are convex.
Before we present the algorithm for finding the Chebyshev center, we state auxiliary optimization problems and present subroutines for finding their solutions. They are: the problem of the hypersphere of minimal radius that contains a given finite set and two constrained least squares problems. Then, we find necessary and sufficient conditions for the point to be the Chebyshev center of a finite set and formulate the dual problem. This immediately reduces the Chebyshev center problem to the fully constrained least squares (FCLS) problem. Then, we present two algorithms for finding the Chebyshev center of a finite set of affinely independent points. Each of the Chebyshev center algorithms can be used in section 1.8 for finding the best approximation by alternating minimization method. Each algorithm is presented twice: first, as a sequence of steps where the algorithm is mentioned, and second, in pseudocode at the end of Appendix 2.
A2.1. Circumcenter of a finite set
DEFINITION A2.1.– Consider points z1,…, zm in the Euclidean space ![]() . A point x is called the circumcenter of {z1,…, zm} if:
. A point x is called the circumcenter of {z1,…, zm} if:
- 1) point x is equidistant from z1,…, zm, i.e. ||x — z1| = ||x — z2|| = … = ||x — zm||;
- 2) point x is the closest to {z1,…, zm} among all equidistant points, i.e.
In other words, the circumcenter is the solution to the optimization problem

The circumcenter may exist and may not exist, because the constraints in the optimization problem can be incompatible. However, if it exists, it is unique, as shown in the following lemma.
LEMMA A2.1.– If the constraints in optimization problem [A2.1] are compatible, problem [A2.1] has a unique solution.
PROOF.– A point x satisfies the constraints in optimization problem [A2.1] if and only if and only if
which is equivalent to
Thus, the constraint set is defined by a system of linear equations and is an affine subspace in ![]() . Since the constraint set is closed and non-empty and the criterion function
. Since the constraint set is closed and non-empty and the criterion function ![]() is continuous and tends to
is continuous and tends to ![]() , the constrained minimum exists. As the constraint set is convex and the criterion function ||x — zm||2 is strictly convex, the constrained minimum is reached at a unique point.
, the constrained minimum exists. As the constraint set is convex and the criterion function ||x — zm||2 is strictly convex, the constrained minimum is reached at a unique point.
□
DEFINITION A2.2.– Let z1,…, zm be the points in ![]() . The sphere
. The sphere ![]() : ||z — a|| = R} of the minimal radius on which all the points zi are located is called the circumsphere of {z1,…, zm}.
: ||z — a|| = R} of the minimal radius on which all the points zi are located is called the circumsphere of {z1,…, zm}.
The circumsphere exists if and only if the circumcenter exists. The circumcenter is the center of the circumsphere.
Now find the circumcenter of {z1,…, zm} under the assumption that the points z1,…,zm are affinely independent, i.e. for ![]() , the equalities
, the equalities ![]() and
and ![]() imply that wi =0 for all i. Let x be the solution to the problem [A2.1]. Then, x minimizes ||x — zm||2 under constraints that will be used in form [A2.2]. The Lagrange function is
imply that wi =0 for all i. Let x be the solution to the problem [A2.1]. Then, x minimizes ||x — zm||2 under constraints that will be used in form [A2.2]. The Lagrange function is

where ![]() are the Lagrange multipliers. The Lagrange equation is
are the Lagrange multipliers. The Lagrange equation is

Substitute [A2.3] into constraints [A2.2]:

Denote n x (m — 1) matrix Z and m—1-dimensional vector ![]()

Note that ||zi — zm||2 is a diagonal element of the matrix Z⊤Z. With this notation, equation [A2.4] can be rewritten as
where diag(Z⊤Z) is a vector created of diagonal elements of the matrix Z⊤Z, and equation [A2.3] can be rewritten as
Affine independence of the vectors zi implies that the matrix Z is of full rank (this seems to be obvious; however, the formal proof is presented in section A2.2) and equation [A2.6] has a unique solution
THEOREM A2.1.– If m ≥ 2 and the points z1,…, zm are affinely independent, then the circumcenter of {z1,…, zm} exists and is equal to
where the matrix Z is defined in [A2.5].
PROOF.– First, we prove that the constraints in optimization problem [A2.1] are compatible. Vector ![]() defined in [A2.8] and vector x defined in [A2.7] satisfy equations [A2.3], [A2.4] and [A2.6] and constraints in problem [A2.1]. Thus, constraints in [A2.1] are compatible.
defined in [A2.8] and vector x defined in [A2.7] satisfy equations [A2.3], [A2.4] and [A2.6] and constraints in problem [A2.1]. Thus, constraints in [A2.1] are compatible.
By Lemma A2.1, the solution to optimization problem [A2.1] exists. By [A2.6] and [A2.7], it satisfies [A2.9].
□
Due to Theorem A2.1, the following algorithm finds the circumcenter of points z1,…, zm as long as z1,…, zm are affinely independent. We present the algorithm in two formats: here as a sequence of steps, and in section A2.5 in pseudocode (see Algorithm A2.1).
Algorithm for finding the circumcenter of a finite set ![]() :
:
Step 1. If m = 1, then take the trivial solution z1 as the circumcenter and stop.
Step 2. Create n × (m — 1) matrix
Step 3. Set ![]()
Step 4. Set ![]() . Take x as the circumcenter.
. Take x as the circumcenter.
A2.2. Constrained least squares
The problem of finding a minimal-norm point in the convex hull of a finite number of affinely independent points is studied in [WOL 76], together with the algorithm for solving the problem. Another version of the algorithm is presented in [CHA 03, Section 10.3].
A point in the convex hull of a finite set {x1,…, xm} can be represented as ![]() with non-negative coefficients wi, which satisfy the constraint
with non-negative coefficients wi, which satisfy the constraint ![]() . Finding the coefficients wi of the minimal-norm element is regarded as the FCLS (see the definition later in this section, equation [A2.15]).
. Finding the coefficients wi of the minimal-norm element is regarded as the FCLS (see the definition later in this section, equation [A2.15]).
A2.2.1. Two constrained least squares problems: SCLS and FCLS
Let X be an n × m matrix with affinely independent columns. The affine independence of the columns means that
Hence, ![]() be a vector.
be a vector.
DEFINITION A2.3.– Sum-constrained least squares (SCLS) problem is the problem of finding the vector ![]() that minimizes ||Xw — y|| under the constraint
that minimizes ||Xw — y|| under the constraint ![]() :
:

Here, ||Xw — y|| is the norm in Euclidean space, so that the norm of the vector y equals ![]()
DEFINITION A2.4.– The FCLS problem is the problem of finding the vector w ∈ ![]() with non-negative elements that minimizes ||Xw — y|| under the constraint
with non-negative elements that minimizes ||Xw — y|| under the constraint ![]()

Denote x1, x2,…, xm the columns of the matrix X:
If w is the solution to the SCLS problem [A2.11], then Xw is the projection of the point y onto the affine subspace spanned by the points x1, x2,…, xm. If w is the solution to the FCLS problem [A2.12], then Xw is the point from the convex hull of x1, x2,…, xm that is nearest to y.
Denote
Then, under the constraints of either [A2.11] or [A2.12], we have
Hence, the SCLS problem [A2.11] is equivalent to

and the FCLS problem [A2.12] is equivalent to

Thus, without loss of generality, we can assume that y = 0. Therefore, consider the SCLS and FCLS problems with y = 0:

THEOREM A2.2.– Provided that the columns of the matrix X are affinely independent, both the SCLS and FCLS problems have a unique solution.
PROOF.– First, prove the theorem for the case y = 0.
On the constraint sets ![]() (for the SCLS problem) and
(for the SCLS problem) and ![]() (for the FCLS problem), the equality
(for the FCLS problem), the equality ![]() (1,…, 1)w = 1 holds true, whence
(1,…, 1)w = 1 holds true, whence
Hence, the alternative criterion function

coincides with the squared criterion function ||Xw||2 on the constraint sets. Since Q1(w) is continuous and tends to +∞ as ||w|| → ∞, and the constraint sets for the SCLS and FCLS problems are closed and non-empty, the solutions to the SCLS [A2.14] and FCLS [A2.15] problems exist. Since Q1(w) is a strictly convex set and the constraint sets are convex, the solution to any of the SCLS and FCLS problems is unique.
Let us establish that the assumption y = 0 does not lead to loss of generality. Under the constraint ![]() , we have that
, we have that ![]()
![]() , where the matrix X1 is defined in [A2.13]. Therefore, we can transform the optimization problem to an equivalent one with y = 0 by changing the matrix X. It remains to prove that if the columns of the matrix X are affinely independent, then the columns of the matrix X1 are also affinely independent. The rest of the proof is devoted to the latter implication.
, where the matrix X1 is defined in [A2.13]. Therefore, we can transform the optimization problem to an equivalent one with y = 0 by changing the matrix X. It remains to prove that if the columns of the matrix X are affinely independent, then the columns of the matrix X1 are also affinely independent. The rest of the proof is devoted to the latter implication.
Because of the equality
(where I is the n × n identity matrix, so ![]() is a non-singular matrix), the ranks of matrices in [A2.16] are equal:
is a non-singular matrix), the ranks of matrices in [A2.16] are equal:
We have the following equivalent properties: the matrix X has affinely independent columns if and only if
which holds true if and only if
which in turn holds true if and only if the matrix X1 has affinely independent columns.
□
A2.2.2. SCLS algorithm
Now, construct the solution to the SCLS problem [A2.14]. Denote m×(m−1) matrix T and m-dimensional vector em:

Then
is a representation of the vector w that satisfies the constraint ![]() from [A2.14]. Equation [A2.17] establishes one-to-one correspondence between
from [A2.14]. Equation [A2.17] establishes one-to-one correspondence between ![]() and the constraint set
and the constraint set ![]()
Affine independence of the columns of the matrix X implies the linear independence of the columns of the matrix XT. Indeed, we have that (1,…, 1)T = 0, whence
The factors on the right-hand side of [A2.18] are matrices with linearly independent columns. Therefore, their product is also a matrix with linearly independent columns, and
Thus, XT is a full-rank matrix with linearly independent columns.
Substitute [A2.17] into [A2.14]. The resulting unconstrained minimization problem
has a solution
Denote
and note that Xem = xm. Then, the minimizer in [A2.19] is equal to
LEMMA A2.2.– If ![]() is the minimizer in the SCLS problem [A2.14], then all the elements of the vector X⊤ Xw are equal.
is the minimizer in the SCLS problem [A2.14], then all the elements of the vector X⊤ Xw are equal.
PROOF.– Here, the notations ![]() and T are the same as above. Vector
and T are the same as above. Vector ![]() minimizes
minimizes ![]() , whence
, whence
The minimizer w is represented as ![]() , whence
, whence
The null space of the matrix T⊤ consists of m-dimensional vectors with all elements equal. Thus, all the elements of the vector X⊤ Xw are equal.
□
Now we present the algorithm for solving problem [A2.14]. If m = 1, then the constraint set consists of a single point and the solution is trivial, i.e. w = 1. Otherwise, we solve [A2.20] and [A2.17]. It is described in Algorithm A2.2, section A2.5.
Algorithm for solving the SCLS problem to minimize ||Xw|| under constraint ![]() has the following steps:
has the following steps:
Step 1. If X is a one-column matrix (i.e. if m = 1), then take the trivial solution w = 1 and stop.
Step 2. Construct an m—1-column matrix X2:
where x1,…, xm are columns of the matrix X.
Step 3. Construct m-dimensional vector w, whose first m — 1 elements are equal to the elements of the vector ![]()
and the last element is equal to

A2.2.3. FCLS algorithm
Now we solve the FCLS problem [A2.15]. Let D be any convex set in ![]() . Also let
. Also let ![]() be the projection of the set D onto jth axis.
be the projection of the set D onto jth axis.
DEFINITION A2.5.– 1) The point w0 is called a feasible point of a minimization problem
if w0 satisfies the constraints, i.e. if w0 ∈ D.
- 2) For the function
 and for the fixed index
and for the fixed index  , the function
, the function  defined by formula
defined by formula
is called the profile of the function f.
The profile of a convex function is a convex function.
LEMMA A2.3.– The vector w is a solution to the FCLS problem if and only if the following holds true: w is the feasible point in the sense that wi ≥ 0 for i = 1,…, m and ![]() , and the elements of the vector
, and the elements of the vector ![]() satisfy the condition
satisfy the condition
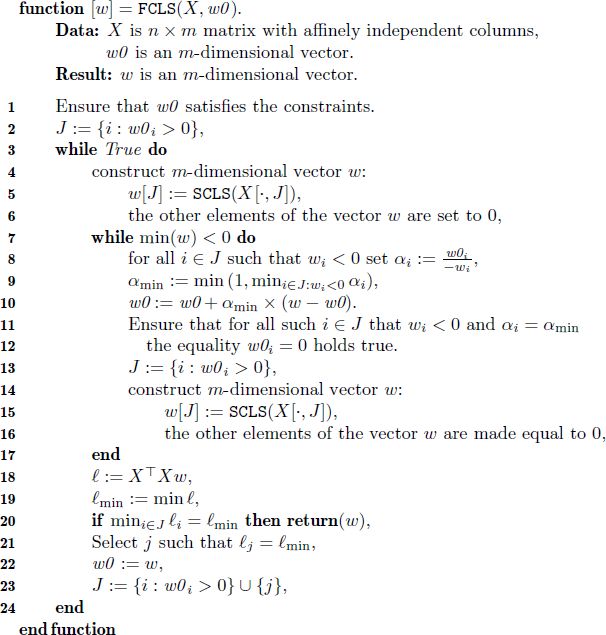
Now we present the algorithm for finding the minimizer in the FCLS problem [A2.14]. In the algorithm, letter J means the set, J ⊂ {1, 2,…, m}; X[·, J] is the submatrix of the matrix X constructed of the columns of the matrix X with indices within the set J; w[J] = (wi, i ∈ J) is the vector made of the elements of vector w with indices within J.
Algorithm for solving the FCLS problem [A2.15], which consists of the minimization of ||Xw|| under constraints ![]() and wi ≥ 0 for i = 1,…, m, has the following form:
and wi ≥ 0 for i = 1,…, m, has the following form:
Step 1. Create an m-dimensional vector w0 that satisfies the constraints [A2.15].
Step 2. Put
Step 3. In order to find the minimizer in the problem

we consider m-dimensional vector w with elements
Step 4. If all the elements of vector w are non-negative, go to step 6. Otherwise, go to step 5.
Step 5. Move w0 toward w as far as it satisfies the constraints. Make sure that after the movement, all the elements of w0 are non-negative. Also make sure that at least one element of w0 that was previously positive becomes 0. Go to step 2.
Step 6. Calculate the vector ![]()
Step 7. If the minimal element of the vector ℓ is reached for some index i ∈ J, i.e. if
then fix w as the result and terminate the algorithm. Otherwise, go to step 8.
Step 8. Select an index j such that ![]()
Step 9. Set w0 = w.
Step 10. Let the set J consist of indices i for which either w0i > 0 or i = j:
Go to step 3.
The FCLS algorithm is presented in section A2.5 as Algorithm A2.3. In the structured representation of the algorithm, step 5 is explained in detail in lines 8–12.
THEOREM A2.3.– Let X be the matrix with affinely independent columns. If all the computations are exact, then Algorithm A2.3 ends and gives the solution to problem [A2.15].
PROOF.– First, prove that if the algorithm ends, then the vector w, which it calculates, will be the solution to the FCLS problem [A2.15]. When the algorithm ends, all the elements of vector w are non-negative,![]() , and for vector
, and for vector ![]() , we have that
, we have that
Thus, ![]() , and vector w satisfies the constraints of optimization problem [A2.15].
, and vector w satisfies the constraints of optimization problem [A2.15].
Due to Lemma A2.2, all elements of the vector ![]() are equal. Since
are equal. Since
all the elements of the vector ![]() are equal. Due to [A2.23],
are equal. Due to [A2.23],
whence [A2.21] follows.
Thus, vector w satisfies Lemma A2.3 and minimizes [A2.15].
Now prove that the algorithm ends. On every iteration of the inner cycle, the finite set J becomes smaller. Hence, on each iteration of the outer cycle, the inner cycle is iterated only a finite number of times. Thus, it is enough to prove that the outer cycle is iterated only a finite number of times. Below we prove this fact.
At lines 4–6 or at lines 14–16 of Algorithm A2.3 in section A2.5, w becomes the minimizer of problem [A2.22].
After the execution of line 1, w0 is a feasible point. Indeed, it is ensured that all elements of w0 are non-negative, and ![]() after line 1. On execution of line 10, w0 becomes a convex combination of its previous value and vector w, which satisfies
after line 1. On execution of line 10, w0 becomes a convex combination of its previous value and vector w, which satisfies ![]() . At line 22, we set w0 = w. Thus, the equality
. At line 22, we set w0 = w. Thus, the equality ![]() never becomes false.
never becomes false.
During the execution of the algorithm, ||X w0|| never increases. Indeed, after line 6 or 16, w minimizes [A2.22] while w0 satisfies the constraints in [A2.22].
Then, ![]() . We set w0 = w at line 22 and
. We set w0 = w at line 22 and ![]()
![]() at line 10. The norm ||Xw|| is a convex function in w. Hence
at line 10. The norm ||Xw|| is a convex function in w. Hence

Now prove that ||Xw0|| strictly decreases on each iteration of the outer cycle starting from the second one. Note that before line 23 ![]() Denote
Denote ![]() for i ∈ J on line 18 (for all i ∈ J, the elements ℓi of the vector ℓ are equal). After line 21,
for i ∈ J on line 18 (for all i ∈ J, the elements ℓi of the vector ℓ are equal). After line 21, ![]() . For j obtained in line 21 and J obtained in line 23 and any
. For j obtained in line 21 and J obtained in line 23 and any ![]() denote
denote
The function B(x) is convex as the profile of a convex function. If x = 0, then the minimum in [A2.24] is reached for w = w0, so that ![]() after line 21. Later on, w is redefined in lines 4–6. With tedious computations, we can prove that the derivative of B(x) at x = 0 is equal to
after line 21. Later on, w is redefined in lines 4–6. With tedious computations, we can prove that the derivative of B(x) at x = 0 is equal to ![]() , whence
, whence
Then, after lines 4–6

If the inner cycle is skipped, then ||Xw0|| strictly decreases on line 22. Otherwise, on the first iteration of the inner cycle ![]() 0 and ||Xw0|| strictly decreases on line 10. Thus, ||Xw0|| strictly decreases on each iteration of the outer cycle.
0 and ||Xw0|| strictly decreases on line 10. Thus, ||Xw0|| strictly decreases on each iteration of the outer cycle.
The vector w can reach only a finite number of different values because there are only a finite number of sets ![]() Thus, ||Xw|| can reach only a finite number of different values. After line 22, w0 = w, and because ||Xw0|| strictly decreases on each iteration of the outer cycle, ||Xw|| strictly decreases between runs of line 22. Hence, line 22 is performed only a finite number of times. The outer cycle has only a finite number of iterations, and as it was discussed earlier, the algorithm ends.
Thus, ||Xw|| can reach only a finite number of different values. After line 22, w0 = w, and because ||Xw0|| strictly decreases on each iteration of the outer cycle, ||Xw|| strictly decreases between runs of line 22. Hence, line 22 is performed only a finite number of times. The outer cycle has only a finite number of iterations, and as it was discussed earlier, the algorithm ends.
□
A2.2.4. Relation between solutions to the SCLS and FCLS problems
Here, we consider the SCLS [A2.14] and FCLS [A2.15] problems.
LEMMA A2.4.– Let X be an n × m matrix with affinely independent columns. Let wSCLS and wFCLS be the solutions to the SCLS and FCLS problems, respectively. Then, one of the following statements holds true:
- 1) the equality wSCLS = wFCLS holds true (as a result, all the elements of the vector wSCLS are non-negative);
- 2) an index i exists for which wSCLS,i < 0 and wFCLS,i = 0.
PROOF.– Assume that statement 2) does not hold true, i.e.
Let us prove that statement 1) holds true, i.e. wSCLS = wFCLS. Indeed, by Lemma A2.2, all elements of the vector ![]() are equal. Denote ℓSCLS the element of
are equal. Denote ℓSCLS the element of ![]() . Then
. Then
Denote
and
Then, by Lemma A2.3 (see equality [A2.21]),
We use equalities [A2.26] and [A2.27] in the following transformations. Since ![]() , we have that
, we have that
and
whence

On the one hand, we can evaluate ![]() as follows:
as follows:
On the other hand,

The inequality
can be verified by considering two cases. If wFCLS,i > 0, then [A2.31] becomes the equality due to [A2.27]. Otherwise, if wFCLS,i = 0, then [A2.31] follows from assumption [A2.25].
It follows from [A2.28], [A2.29], [A2.30] and [A2.31] that ℓSCLS = ℓmin. Hence, wFCLS is also a solution to the SCLS problem. By Theorem A2.2, wFCLS = wSCLS.
□
A2.3. Dual problem
The Chebyshev center of the non-empty finite set {z1, z2,…, zm} minimizes the functional
The Chebyshev center of a non-empty finite set exists and is unique (see Definition 1.2 and Corollary 1.6 in section 1.8.2).
THEOREM A2.4.– Let z1,…,zm and x be the points in ![]() . Then, the following statements are equivalent:
. Then, the following statements are equivalent:
- I) x is the Chebyshev center of {z1, z2,…,zm}.
- II) Non-negative numbers w1,…, wm and R exist such that:
- III) The set
 can be split into two subsets
can be split into two subsets  and
and  (which we call the set of active points and the set of passive points) as follows:
(which we call the set of active points and the set of passive points) as follows:
- a) x belongs to the convex hull of the active set ;
- b) x is a center of the smallest sphere that contains the active set ; i.e. x is the circumcenter of the active points (see the definition of circumcenter in section A2.1);
- c) the passive points lie closer to x than the active points, i.e. the passive points lie inside or on the circumsphere of the active points.
- a) x belongs to the convex hull of the active set
REMARK A2.1.– In Theorem A2.4, condition III(c) means that
However, under condition III(b), this is equivalent to
In order to prove Theorem A2.4, we will verify the Karush–Kuhn–Tucker conditions, implementing this verification via the following version of the Karush–Kuhn–Tucker theorem.
THEOREM A2.5.– Let g, f1, …, fm be concave differentiable functions on ![]() . Suppose the following condition holds true:
. Suppose the following condition holds true:
Then, ![]() is the maximizer of the optimization problem
is the maximizer of the optimization problem

if and only if ![]() exists such that for the function
exists such that for the function
the following conditions hold true:
For the proof, we refer to [KUH 51, Theorems 1, 2, and Section 8]. See also [COT 12].
REMARK A2.2.– For necessity (the “only if” part of Theorem A2.5), the concavity of the function g(x) is not needed. For sufficiency (the “if” part of Theorem A2.5), condition [A2.32] is not needed.
PROOF OF THEOREM A2.4.– The Chebyshev center is the minimizer of the function Q(y). The function Q(y) is not “everywhere” differentiable. Hence, we reduce the minimization of Q to a constrained maximization problem that involves only differentiable functions.
The maximum in ![]() is equal to the least R2 that satisfies inequalities
is equal to the least R2 that satisfies inequalities
Therefore, among all pairs (R2, x) that satisfy
the minimal component R2 is equal to min Q(y), and the corresponding x is the minimizer of Q.
Thus, the problem of unconstrained minimization of Q(x) is reduced to the following constrained maximization problem:

Here, we have n + 1 unknown variables: one is ![]() and the other n are the elements of the vector x.
and the other n are the elements of the vector x.
In order to describe the maximizer, we apply Theorem A2.5. The functions g and fi are
these functions are concave and differentiable. Obviously, inequalities ![]() hold true if x = 0 and
hold true if x = 0 and ![]()
![]() . The function φ form [A2.34] has a form
. The function φ form [A2.34] has a form
The necessary and sufficient maximality conditions are provided by Theorem A2.5. Condition [A2.35] takes the form


while condition [A2.36] takes the following form: for all i = 1,…,m
Obviously, R2 ≥ 0. Conditions [A2.38]–[A2.42] are equivalent to the conditions in statement II with ![]() . Indeed, [A2.38] and [A2.41] are equivalent to II(a), and [A2.40] is equivalent to II(b). If [A2.41] holds true, then [A2.42] is equivalent to II(c). If [A2.38] holds true, then [A2.39] is equivalent to II(d).
. Indeed, [A2.38] and [A2.41] are equivalent to II(a), and [A2.40] is equivalent to II(b). If [A2.41] holds true, then [A2.42] is equivalent to II(c). If [A2.38] holds true, then [A2.39] is equivalent to II(d).
Now prove that statements II and III are equivalent. Suppose that statement II holds true. Split the set {zi, i = 1,…, m} as follows. Let the active set consist of the points zi with positive weights wi:
Then, III(a) follows from II(a) and II(d), III(b) follows from II(c) and III(a), and III(c) follows from II(b) and II(c). Thus, statement III holds true.
Now suppose that statement III holds true. Due to III(a), x is a convex combination of elements
and Wz ≥ 0 for all ![]() . Now choose the vector w. If all zi’s are different, i.e. if
. Now choose the vector w. If all zi’s are different, i.e. if ![]() , then let
, then let

Otherwise, if some vector z appears in {z1,…, zm} several times, we should be careful not to assign its weight Wz to multiple wi’s. In that case, we put

Then, II(a) and II(d) hold true.
Point x is equidistant from all active points due to III(b). Denote this distance as R. Then, II(c) holds true.
Condition II(b) follows from II(c) and III(c). Thus, statement II holds true.
□
The dual optimization problem is to find the weights w1,…, wm that maximize the functional
under the constraints

If there exists a point y equidistant from zi’s, i.e. if
then the dual problem is equivalent to minimizing the value

under constraints [A2.44].
THEOREM A2.6.-
- I) A point
 is the Chebyshev center of {z1,…, zm} if and only if non-negative numbers w1,…, wn exist such that:
is the Chebyshev center of {z1,…, zm} if and only if non-negative numbers w1,…, wn exist such that:
- II) If there exists a point y equidistant from z1,…,zm, then a point
 is the Chebyshev center of {z1,…,zm} if and only if non-negative numbers w1,…,wn exist such that:
is the Chebyshev center of {z1,…,zm} if and only if non-negative numbers w1,…,wn exist such that:
In the proof of Theorem A2.6, we will use the following version of the Karush–Kuhn–Tucker theorem.
THEOREM A2.7.– Let g be a concave differentiable function ![]() , and let f be an affine function
, and let f be an affine function ![]() in the form
in the form ![]() for some fixed k1,…, kn, and h. Then, x0 is a maximizer of the problem
for some fixed k1,…, kn, and h. Then, x0 is a maximizer of the problem
if and only if u0 exists such that for the function
the following conditions hold true
for all j = 1,…, n, and
For the proof, we again refer to [KUH 51, Theorems 1, 2, and Section 8].
PROOF OF THEOREM A2.6.– Part 1. We apply Theorem A2.7 to obtain a system of equations and inequalities that is equivalent to constrained maximization problem [A2.43]–[A2.44]. We have

Note that the function g is concave and the function f is affine. Function φ from [A2.47] and its partial derivatives equal
The necessary and sufficient optimality conditions now have a form:

Conditions [A2.48] can be rewritten as follows: ![]() exists such that:
exists such that:

Since

with ![]() not depending on k, the optimality conditions (a)–(c) are equivalent to the following: C ≥ 0 exists such that:
not depending on k, the optimality conditions (a)–(c) are equivalent to the following: C ≥ 0 exists such that:

With C = R2 and ![]() , conditions (a’)–(c’) are the same as in part II of Theorem A2.4, which provides necessary and sufficient conditions for the point x to be a Chebyshev center.
, conditions (a’)–(c’) are the same as in part II of Theorem A2.4, which provides necessary and sufficient conditions for the point x to be a Chebyshev center.
Part 2. The point x minimizes the functional ![]() if and only if point
if and only if point ![]() minimizes the functional
minimizes the functional
Due to part 1 of the present theorem, ![]() minimizes
minimizes ![]() if and only if there exist weights w1,…, wm that maximize
if and only if there exist weights w1,…, wm that maximize



A2.4. Algorithm for finding the Chebyshev center
We slightly modify the algorithm presented in [BOT 93]. As a prerequisite, we will require that the input points are affinely independent. During the computation, point a will stand for the approximation to the Chebyshev center, and ![]() will be the current active set. The active points will be equidistant from a, and the passive points are located not further, i.e.
will be the current active set. The active points will be equidistant from a, and the passive points are located not further, i.e.

The circumcenter of the active set will be denoted by o. It will be a projection of the current approximation a onto the hyperplane spanned by the active set. However, it may or may not lie in the convex hull of the active set.
In our algorithm for finding the Chebyshev center, two steps are used several times. In the deflate step, the approximation a is moved towards o as long as the largest distance between the approximation and passive points does not exceed the distance between the approximation and active points. In the other step, unnecessary points are removed from the set of active points.
A2.4.1. Deflate step
Recall the conditions that hold true during the process of the Chebyshev center algorithm:
- –
 is the fixed finite set, consisting of affinely independent points, the circumcenter of which we are evaluating;
is the fixed finite set, consisting of affinely independent points, the circumcenter of which we are evaluating; - –
 is the set of active points;
is the set of active points; - – the points o and a are equidistant from the active points (i.e. ||o – x|| is the same for all
 , and ||a — x|| is also the same for all
, and ||a — x|| is also the same for all  );
);
- – o is the circumcenter of ;
- – o and a satisfy the inequality
- – o is the circumcenter of
In the deflate step, we try to reduce ![]() (where x is an arbitrary point of the set
(where x is an arbitrary point of the set ![]() ), keeping the conditions satisfied.
), keeping the conditions satisfied.
The set of points equidistant from the active points is an affine subspace, which is orthogonal to the affine subspace spanned by the active points, see the proof of Lemma A2.1. As a result, all the points of the segment [o, a] = ![]() are equidistant from the active points, i.e.
are equidistant from the active points, i.e.
and vectors a — o and x — o are orthogonal, i.e. ![]() for all
for all ![]() .
.
In the following, ![]() is some active point. The norms ||x — o||, ||x — a|| and ||o + λ(a − o)−x|| do not depend on x, so it does not matter which active point is chosen.
is some active point. The norms ||x — o||, ||x — a|| and ||o + λ(a − o)−x|| do not depend on x, so it does not matter which active point is chosen.
Find the point ![]() from the segment [o, a] for which ||anew—x|| is minimal while inequality [A2.51] holds true. Since
from the segment [o, a] for which ||anew—x|| is minimal while inequality [A2.51] holds true. Since
the norm ||anew — x|| decreases as λ ≥ 0 decreases. Hence, we find the minimal λ ≥ 0 for which
Then, take anew = o + λ(a — o) as the new value for a.
For a given ![]() , the inequality
, the inequality
is equivalent to

Note that due to [A2.51], inequality [A2.52] holds true for λ = 1. Therefore, inequality [A2.53] holds true for λ = 1 and for all ![]() .
.
Now solve inequality [A2.53] for λ ∈ [0,1]. Consider three cases. If ![]() , then [A2.53] holds true for all λ ∈ [0,1], because it holds true for λ = 1. If
, then [A2.53] holds true for all λ ∈ [0,1], because it holds true for λ = 1. If ![]() and
and ![]() , then obviously [A2.53] holds true for all λ ∈ [0,1]. Otherwise, if
, then obviously [A2.53] holds true for all λ ∈ [0,1]. Otherwise, if ![]() and ||z — o||2 — ||x — o||2 > 0, then [A2.53] holds true for all
and ||z — o||2 — ||x — o||2 > 0, then [A2.53] holds true for all
For fixed λ ∈ [0,1], inequality [A2.52] is satisfied if and only if inequality [A2.53] is satisfied for all ![]() , which is equivalent to
, which is equivalent to
where K is a subset of ![]() ,
,
Note that ![]() .
.
If ![]() , then the minimal λ ∈ [0,1] for which [A2.52] holds true is 0. If
, then the minimal λ ∈ [0,1] for which [A2.52] holds true is 0. If ![]() then minimal λ for which [A2.52] holds true is
then minimal λ for which [A2.52] holds true is
In the former case, optimal anew coincides with o. In the latter case, for ![]() with λ defined in [A2.54], for at least one z ∈ K the equality ||anew — z|| = ||anew — x|| holds true.
with λ defined in [A2.54], for at least one z ∈ K the equality ||anew — z|| = ||anew — x|| holds true.
In the deflate step, we perform the following:
- – move a towards o as close as possible without ruining inequality [A2.51];
- – if the new point a does not coincide with o (this is the case
 , include points z ∈ K for which ||a — z|| = ||a — x|| into the active set ;
, include points z ∈ K for which ||a — z|| = ||a — x|| into the active set ; - – adjust the circumcenter o according to the new active set .
The algorithm of the deflate step is the following:
Step 1. Find the set ![]() and ||z — o||2 — r2 > 0}, where r2 = ||x — o||2 for all x ∈ X (the value of ||x — o||2 does not depend on the choice of x ∈ X is used).
and ||z — o||2 — r2 > 0}, where r2 = ||x — o||2 for all x ∈ X (the value of ||x — o||2 does not depend on the choice of x ∈ X is used).
Step 2. If ![]() , put a := o and stop.
, put a := o and stop.
Step 3. For every z ∈ K, evaluate
Step 4. Put ![]()
Step 5. Ensure that λmax ∈ [0,1]. Hence, if λmax > 1 (which cannot occur if all the computations were exact, but may occur due to computational errors), then put λmax := 1.
Step 6. Put ![]()
Step 7. Include into the active point set ![]() the element (or the elements) z ∈ K for which
the element (or the elements) z ∈ K for which ![]() was adjusted in step 5):
was adjusted in step 5):
Step 8. Evaluate the circumcenter of the active set ![]() and assign its value to o.
and assign its value to o.
Then a, ![]() and o are the results. This is Algorithm A2.4 presented in section A2.5 in pseudocode.
and o are the results. This is Algorithm A2.4 presented in section A2.5 in pseudocode.
Note the following fact: either the active point set ![]() does not change in the deflate step and a = o after the step, or the active point set
does not change in the deflate step and a = o after the step, or the active point set ![]() strictly increases in the deflate step.
strictly increases in the deflate step.
A2.4.2. Two algorithms for the evaluation of the Chebyshev center
In this section, we present two algorithms for the evaluation of the Chebyshev center of an affinely independent set ![]() . The affine independence makes the evaluation of the circumcenter of the input points (or of any of their subset) well defined.
. The affine independence makes the evaluation of the circumcenter of the input points (or of any of their subset) well defined.
Once we have Circumcenter and FCLS algorithms available, we can find the algorithm as follows.
The first algorithm for finding the Chebyshev center of an affine independent set ![]() is as follows:
is as follows:
Step 1. Find the circumcenter of the set ![]() :
:
Step 2. Construct the matrix
where z1,…,zm are the elements of the set ![]() .
.
Step 3. Choose an arbitrary vector w0 that satisfies the constraints [A2.44].
Step 4. Solve the FCLS problem:
Step 5. Put ![]() The point a is the Chebyshev center.
The point a is the Chebyshev center.
The weights evaluated in step 4 constitute the solution to the dual problem (see Theorem A2.6). As a result, the algorithm evaluates the Chebyshev center as expected.
The drawback of this algorithm is its instability if the points zi are nearly affinely dependent. In this case, the circumcenter o can be a distant point, which may affect the precision of computation.
Hence, we propose another algorithm for finding the Chebyshev center. The inputs for this algorithm are the initial approximation a and the finite set ![]() The outputs are the Chebyshev center a and the final set of active points
The outputs are the Chebyshev center a and the final set of active points ![]() .
.
The second algorithm for finding the Chebyshev center of an affine independent set ![]() is as follows:
is as follows:
Step 1. Initialize the set ![]() of active points. It will consist of the point of
of active points. It will consist of the point of ![]() , which are the most distant from the a:
, which are the most distant from the a:

Step 2. Evaluate the circumcenter of the active points:
Step 3. Repeat the deflate step
until a = o.
Step 4. Evaluate the weights in the convex combination o = ![]() . To do this, construct the matrix Xo of the form
. To do this, construct the matrix Xo of the form
where x1,…, xp are the elements of the active set ![]() and p is the number of elements in
and p is the number of elements in ![]() . Then, apply the SCLS algorithm:
. Then, apply the SCLS algorithm:
Step 5. If all the elements of the vector wSCLS are non-negative, take a as the Chebyshev center, ![]() as the final set of active points and stop.
as the final set of active points and stop.
Step 6. Solve the FCLS problem. Construct a vector w0 of the initial approximation:

Then, put
Step 7. In Lemma A2.4, the second alternative holds true. An index i exists such that wSCLS,i < 0 and wFCLS,i = 0. (Choose one if these hold true for multiple i’s.) Remove the point x that corresponds to such i from the active set ![]() . Go to step 2.
. Go to step 2.
It is Algorithm A2.5 presented in pseudocode in section A2.5.
During the execution of the algorithm, the inequality
holds true. When the algorithm ends, a = o is a convex combination of the active points; moreover, it is the circumcenter of the set ![]() of the active points. By Theorem A2.4, a is the Chebyshev center of the set
of the active points. By Theorem A2.4, a is the Chebyshev center of the set ![]() .
.
A2.5. Pseudocode of algorithms
Now we transform the algorithms previously presented as a sequence of steps into pseudocode in order to allow the reader to implement them in a structured programming language.
Algorithm A2.1.– Pseudocode of the algorithm for finding the center of the circumscribed sphere of a finite set (see the sequence of steps in section A2.1).

ALGORITHM A2.2.– Pseudocode of the algorithm for solving the SCLS problem (see the sequence of steps in section A2.2.2).

The lines of the following algorithm are referenced in the proof of Theorem A2.3.
ALGORITHM A2.3.– Pseudocode of the algorithm for solving the FCLS problem (see the sequence of steps in section A2.2.3).
Here, “Ensure that … the equality w0i = 0 holds true” means the following. If computations are performed with errors, then set w0i = 0. Otherwise, if all computations are exact, then do nothing.
ALGORITHM A2.4.– Pseudocode of the deflate step of the Chebyshev center algorithm (see the sequence of steps in section A2.4.1).

ALGORITHM A2.5.– Pseudocode of the second algorithm for finding the Chebyshev center (see the sequence of steps in section A2.4.2).

