
Long short-term memory (LSTM) is a special kind of RNN architecture that's capable of learning long-term dependencies. It was introduced by Sepp Hochreiter and Jürgen Schmidhuber in 1997 and was then improved on and presented in the works of many other researchers. It perfectly solves many of the various problems we've discussed, and are now widely used.
In LSTM, each cell has a memory cell and three gates (filters): an input gate, an output gate, and a forgetting gate. The purpose of these gates is to protect information. The input gate determines how much information from the previous layer should be stored in the cell. The output gate determines how much information the following layers should receive. The forget gate, no matter how strange it may seem, performs a useful function. For example, if the network studies a book and moves to a new chapter, some words from the old chapter can be safely forgotten:
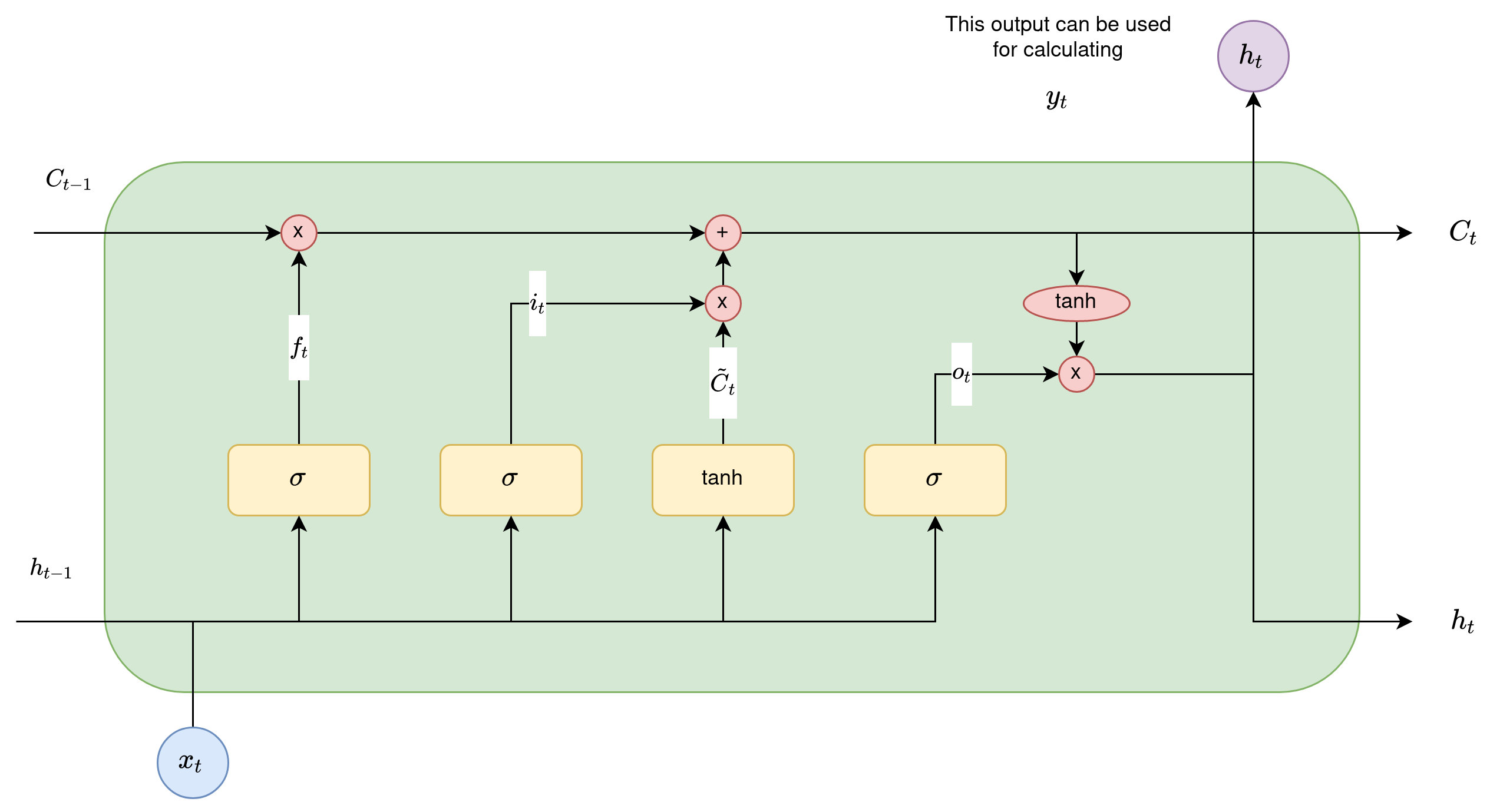
The critical component of LSTM is the cell state – a horizontal line running along the top of the circuit. The state of the cell resembles a conveyor belt. It goes directly through the whole chain, participating in only a few linear transformations. Information can easily flow through it, without being modified.
However, LSTM can remove information from the state of a cell. Structures called gates or filters govern this process. Gates or filters let you skip information based on some conditions. They consist of a sigmoidal neural network layer and pointwise multiplication operation:
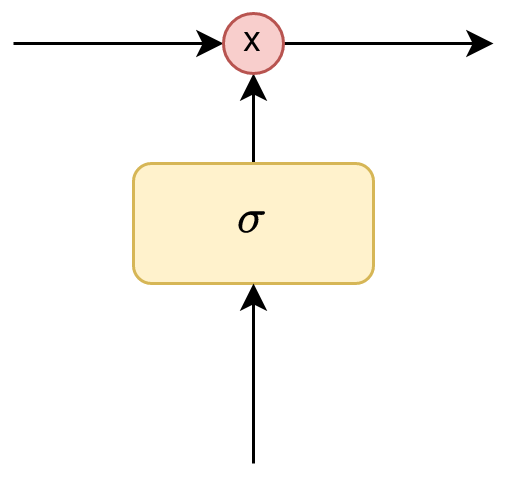
The sigmoidal layer returns numbers from zero to one, which indicates what proportion of each block of information should be skipped further along the network. A zero value, in this case, means skip everything, whereas one means keep everything.
There are three such gates in LSTM that allow you to save and control the state of a cell. The first information flow stage in the LSTM determines what information can be discarded from the state of the cell. This decision is made by the sigmoidal layer, called the forget gate layer. It looks at the state of the cell and returns a number from 0 to 1 for each value. 1 means keep everything, while 0 means skip everything:

The next flow stage in the LSTM decides what new information should be stored in the cell state. This phase consists of two parts. First, a sigmoidal layer called the input layer gate determines which values should be updated. Then, the tanh layer builds a vector of new candidate values,  , which can be added to the state of the cell:
, which can be added to the state of the cell:

To replace the old state of the cell with the new state, we need to multiply the old state of  by
by  , forgetting what we decided to forget. Then, we add
, forgetting what we decided to forget. Then, we add  (the new candidate values, multiplied by how much we want to update each status value):
(the new candidate values, multiplied by how much we want to update each status value):

The output values are based on our cell state, and gate functions (filters) should be applied to them. First, we apply a sigmoidal layer named the output gate, which decides what information from the state of the cell we should output. Then, the state values of the cell pass through the tanh layer to get values from -1 to 1 as the output, which is multiplied by the output values of the sigmoid layer. This allows you to output only the required information:
There are many variations of LSTM based on this idea. Let's take a look at some of them now.