7.1 The Jordan Canonical Form I
Let T be a linear operator on a finite-dimensional vector space V, and suppose that the characteristic polynomial of T splits. Recall from Section 5.2 that the diagonalizability of T depends on whether the union of ordered bases for the distinct eigenspaces of T is an ordered basis for V. So a lack of diagonalizability means that at least one eigenspace of T is too “small.”
In this section, we extend the definition of eigenspace to generalized eigenspace. From these subspaces, we select ordered bases whose union is an ordered basis for V such that
where each O is a zero matrix, and each is a square matrix of the form or
for some eigenvalue of T. Such a matrix is called a Jordan block corresponding to , and the matrix is called a Jordan canonical form of T. We also say that the ordered basis is a Jordan canonical basis for T. Observe that each Jordan block is “almost” a diagonal matrix—in fact, is a diagonal matrix if and only if each is of the form .
Example 1
Suppose that T is a linear operator on , and is an ordered basis for such that
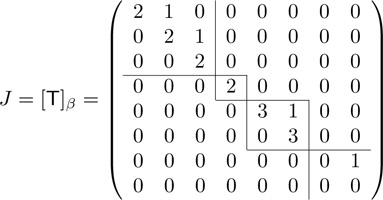
is a Jordan canonical form of T. Notice that the characteristic polynomial of T is , and hence the multiplicity of each eigenvalue is the number of times that the eigenvalue appears on the diagonal of J. Also observe that , and are the only vectors in that are eigenvectors of T. These are the vectors corresponding to the columns of J with no 1 above the diagonal entry.
In Sections 7.1 and 7.2, we prove that every linear operator whose characteristic polynomial splits has a Jordan canonical form that is unique up to the order of its Jordan blocks. Nevertheless, it is not the case that the Jordan canonical form is completely determined by the characteristic polynomial of the operator. For example, let be the linear operator on such that , where is the ordered basis in Example 1 and
Then the characteristic polynomial of is also . But the operator has the Jordan canonical form , which is different from J, the Jordan canonical form of the linear operator T of Example 1.
Consider again the matrix J and the ordered basis of Example 1. Notice that , and so . Similarly, . Since and are eigenvectors of T corresponding to , it follows that for and 4. Similarly for , and for .
Because of the structure of each Jordan block in a Jordan canonical form, we can generalize these observations: If v lies in a Jordan canonical basis for a linear operator T and is associated with a Jordan block with diagonal entry , then . Eigenvectors satisfy this condition for .
Definition.
Let T be a linear operator on a vector space V, and let be a scalar. A nonzero vector x in V is called a generalized eigenvector of T corresponding to if for some positive integer p.
Notice that if x is a generalized eigenvector of T corresponding to , and p is the smallest positive integer for which , then is an eigenvector of T corresponding to . Therefore is an eigenvalue of T.
In the context of Example 1, each vector in is a generalized eigenvector of T. In fact, , and correspond to the eigenvalue 2, and correspond to the eigenvalue 3, and and correspond to the eigenvalue 0.
Just as eigenvectors lie in eigenspaces, generalized eigenvectors lie in “generalized eigenspaces.”
Definition.
Let T be a linear operator on a vector space V, and let be an eigenvalue of T. The generalized eigenspace of T corresponding to , denoted , is the subset of V defined by
Note that consists of the zero vector and all generalized eigenvectors corresponding to .
Recall that a subspace W of V is T-invariant for a linear operator T if . In the development that follows, we assume the results of Exercises 3 and 4 of Section 5.4. In particular, for any polynomial g(x), if W is T-invariant, then it is also g(T)-invariant. Furthermore, the range of a linear operator T is T-invariant.
Theorem 7.1.
Let T be a linear operator on a vetor space V, and let be an eigenvalue of T. Then
-
is a T-invariant subspace of V containing (the eigenspace of T corresponding to ).
-
For any eigenvalue of T such that ,
-
For any scalar , the restriction of to is one-to-one and onto.
Proof.
(a) Clearly, . Suppose that x and y are in . Then there exist positive integers p and q such that
Therefore
and hence . The proof that is closed under scalar multiplication is straightforward.
To show that is T-invariant, consider any . Choose a positive integer p such that . Then
Therefore .
Finally, it is a simple observation that is contained in .
(b) Suppose that . Then there exist positive integers p and q such that
As polynomials in and are relatively prime, and hence by Theorem E.2 in Appendix E there exist polymomials and such that
It follows that
and hence .
(c) Let be any scalar such that . Since is T-invariant, it is also -invariant. If for some , then . Hence by (b), and we conclude that the restriction of to is one-to-one.
We now show that the restriction of to is onto. Let , p be the smallest positive integer for which , and
It is easily shown that W is a T-invariant subspace of , and hence it is also -invariant. So maps W to W. Since is one-to-one on , it must be one-to-one on W. Thus, because W is finite-dimensional, maps W onto W. So there exists a such that . Therefore maps onto .
Theorem 7.2.
Let T be a linear operator on a finite-dimensional vector space V such that the characteristic polynomial of T splits. Suppose that is an eigenvalue of T with multiplicity m. Then
Proof.
(a) Let , and let h(t) be the characteristic polynomial of . By Theorem 5.20 (p. 312), h(t) divides the characteristic polynomial of T, and by Theorem 7.1(b), is the only eigenvalue of . Hence , where , and .
(b) Clearly . The characteristic polynomial of T is of the form , where g(t) is a product of powers of the form for eigenvalues . By Theorem 7.1, g(T) is one-to one on . Since is finite-dimensional, it is also onto. Let . Then there exists such that . Hence
by the Cayley-Hamilton Theorem. Therefore , and thus .
Theorem 7.3.
Let T be a linear operator on a finite-dimensional vector space V such that the characteristic polynomial of T splits, and let be the distinct eigenvalues of T. Then, for every , there exist unique vectors , for , such that
Proof.
Suppose the characteristic polynomial of T is
For , let
First, we prove the existence of the vectors . Because the polynomials are relatively prime for , by Theorem E.2 there exist polynomials for such that
It follows that
For , let . Then for each i,
by the Cayley-Hamilton theorem. It follows that for .
Now we prove the uniqueness of the vectors . Since each is T-invariant, each is invariant under the operator for . Furthermore, is one-to-one on by Theorem 7.1(c) and maps to {0} for by Theorem 7.2(b).
Suppose that
where for . Then for ,
and hence since for . Because is one-to-one on , it follows that .
The next result extends Theorem 5.8(b) (p. 267) to all linear operators whose characteristic polynomials split. In this case, the eigenspaces are replaced by generalized eigenspaces.
Theorem 7.4.
Let T be a linear operator on a finite-dimensional vector space V whose characteristic polynomial splits. For , let be an ordered basis for . Then
-
for .
-
is an ordered basis for V.
-
for all i.
Proof.
(a) This is a direct consequence of Theorem 7.1(b).
(b) First, we prove that is linearly independent. Consider a linear combination of vectors in equal to 0. For each i, let be the sum of the terms of this linear combination involving the vectors in . Then
and hence for all i by Theorem 7.3. Since each is linearly independent, it follows that all of the coefficients in the linear combination are zeros. Hence is linearly independent.
We now prove that is a spanning set for V. Consider any vector . By Theorem 7.3, for there exist vectors such that . Since each is a linear combination of the vectors in , v is a linear combination of the vectors in . Hence spans V.
(c) Since dim(V) is equal to the degree of the characteristic polynomial of T, it follows that . By (b), . Hence . By Theorem 7.2(a), for all i. Consequently, for all i, which is the desired result.
Corollary.
Let T be a linear operator on a finite-dimensional vector space V such that the characteristic polynomial of T splits. Then T is diagonalizable if and only if for every eigenvalue of T.
Proof.
Combining Theorems 7.4 and 5.8(a) (p. 267), we see that T is diagonalizable if and only if for each eigenvalue of T. But , and hence these subspaces have the same dimension if and only if they are equal.
We now focus our attention on the problem of selecting suitable bases for the generalized eigenspaces of a linear operator so that we may use Theorem 7.4 to obtain a Jordan canonical basis for the operator. For this purpose, we consider again the basis of Example 1. We have seen that the first four vectors of lie in the generalized eigenspace . Observe that the vectors in that determine the first Jordan block of J are of the form
Furthermore, observe that . The relation between these vectors is the key to finding Jordan canonical bases. This leads to the following definitions.
Definitions.
Let T be a linear operator on a vector space V, and let x be a generalized eigenvector of T corresponding to the eigenvalue . Suppose that p is the smallest positive integer for which . Then the ordered set
is called a cycle of generalized eigenvectors of T corresponding to . The vectors and x are called the initial vector and the end vector of the cycle, respectively. We say that the length of the cycle is p.
Notice that the initial vector of a cycle of generalized eigenvectors of a linear operator T is the only eigenvector of T in the cycle. Also observe that if x is an eigenvector of T corresponding to the eigenvalue , then the set is a cycle of generalized eigenvectors of T corresponding to of length 1.
In Example 1, the subsets , and are the cycles of generalized eigenvectors of T that occur in . Notice that is a disjoint union of these cycles. Furthermore, setting for , we see that is a basis for and is the ith Jordan block of the Jordan canonical form of T. This is precisely the condition that is required for a Jordan canonical basis.
Theorem 7.5.
Let T be a linear operator on a finite-dimensional vector space V whose characteristic polynomial splits, and suppose that is a basis for V such that is a disjoint union of cycles of generalized eigenvectors of T. Then the following statements are true.
-
For each cycle of generalized eigenvectors contained in is T-invariant, and is a Jordan block.
-
is a Jordan canonical basis for V.
Proof.
(a) Suppose that corresponds to the eigenvalue has length p, and x is the end vector of . Then , where
So
and hence . For ,
This shows that maps W into itself, and so T does also. Thus, by the preceding equations, we see that is a Jordan block.
For (b), simply repeat the arguments of (a) for each cycle in in order to obtain . We leave the details as an exercise.
In view of this result, we must show that, under appropriate conditions, there exist bases that are disjoint unions of cycles of generalized eigenvectors. Since the characteristic polynomial of a Jordan canonical form splits, this is a necessary condition. We will soon see that it is also sufficient. The next result moves us toward the desired existence theorem.
Theorem 7.6.
Let T be a linear operator on a vector space V, and let be an eigenvalue of T. Suppose that are cycles of generalized eigenvectors of T corresponding to such that the initial vectors of the ’s are distinct and form a linearly independent set. Then the ’s are disjoint, and their union is linearly independent.
Proof.
Exercise 5 shows that the ’s are disjoint.
The proof that is linearly independent is by mathematical induction on the number of vectors in . If this number is 1, then the result is clear. So assume that, for some integer , the result is true whenever has fewer than n vectors, and suppose that has exactly n vectors. Let W be the subspace of V generated by . Clearly W is -invariant, and . Let U denote the restriction of to W.
For each i, let denote the cycle obtained from by deleting the end vector. Note that if has length one, then . In the case that , each vector of is the image under U of a vector in , and conversely, every nonzero image under U of a vector of is contained in . Let .
Then by the last statement, generates R(U). Furthermore, consists of vectors, and the initial vectors of the ’s are also initial vectors of the ’s. Thus we may apply the induction hypothesis to conclude that is linearly independent. Therefore is a basis for R(U). Hence . Since the q initial vectors of the ’s form a linearly independent set and lie in N(U), we have . From these inequalities and the dimension theorem, we obtain
We conclude that . Since generates W and consists of n vectors, it must be a basis for W. Hence is linearly independent.
Corollary.
Every cycle of generalized eigenvectors of a linear operator is linearly independent.
Theorem 7.7.
Let T be a linear operator on a finite-dimensional vector space V, and let be an eigenvalue of T. Then has an ordered basis consisting of a union of disjoint cycles of generalized eigenvectors corresponding to .
Proof.
The proof is by mathematical induction on . The result is clear for . So suppose that for some integer the result is true whenever , and assume that . Let U denote the restriction of to . Then R(U) is a subspace of of lesser dimension, and R(U) is the space of generalized eigenvectors corresponding to for the restriction of T to R(U). Therefore, by the induction hypothesis, there exist disjoint cycles of generalized eigenvectors of this restriction, and hence of T itself, corresponding to for which is a basis for R(U). For , the end vector of is the image under U of a vector , and so we can extend each to a larger cycle of generalized eigenvectors of T corresponding to . For , let be the initial vector of (and hence of ). Since is a linearly independent subset of , this set can be extended to a basis for . Then are disjoint cycles of generalized eigenvectors of T corresponding to such that the initial vectors of these cycles are linearly independent. Therefore their union is a linearly independent subset of by Theorem 7.6.
Finally, we show that is a basis for . Suppose that consists of vectors. Then consists of vectors. Furthermore, since is a basis for , it follows that . Therefore
So is a linearly independent subset of containing vectors, and thus is a basis for .
Corollary 1.
Let T be a linear operator on a finite-dimensional vector space V whose characteristic polynomial splits. Then T has a Jordan canonical form.
Proof.
Let be the distinct eigenvalues of T. By Theorem 7.7, for each i there is an ordered basis consisting of a disjoint union of cycles of generalized eigenvectors corresponding to . Let . Then, by Theorem 7.5(b), is a Jordan canonical basis for V.
The Jordan canonical form also can be studied from the viewpoint of matrices.
Definition.
Let be such that the characteristic polynomial of A (and hence of ) splits. Then the Jordan canonical form of A is defined to be the Jordan canonical form of the linear operator on .
The next result is an immediate consequence of this definition and Corollary 1.
Corollary 2.
Let A be an matrix whose characteristic polynomial splits. Then A has a Jordan canonical form J, and A is similar to J.
Proof.
Exercise.
We can now compute the Jordan canonical forms of matrices and linear operators in some simple cases, as is illustrated in the next two examples. The tools necessary for computing the Jordan canonical forms in general are developed in the next section.
Example 2
Let
To find the Jordan canonical form for A, we need to find a Jordan canonical basis for .
The characteristic polynomial of A is
Hence and are the eigenvalues of A with multiplicities 1 and 2, respectively. By Theorem 7.4, , and . By Theorem 7.2, , and . Since , we have that . Observe that is an eigenvector of T corresponding to ; therefore
is a basis for .
Since and a generalized eigenspace has a basis consisting of a union of cycles, this basis is either a union of two cycles of length 1 or a single cycle of length 2. Since the rank of is 2 it follows that . Hence the former is not the case. It can easily be shown that is an eigenvector of A corresponding to . This vector can serve as the initial vector of the cycle. Any solution to the equation will serve as the end vector. For example, we can take . Thus
is a cycle of generalized eigenvectors for . Finally, we take the union of these two bases to obtain
which is a Jordan canonical basis for A. Therefore,
is a Jordan canonical form for A. Notice that A is similar to J. In fact, , where Q is the matrix whose columns are the vectors in .
Example 3
Let T be the linear operator on defined by . We find a Jordan canonical form of T and a Jordan canonical basis for T.
Let be the standard ordered basis for . Then
which has the characteristic polynomial . Thus is the only eigenvalue of T, and hence by Theorem 7.4. So is a basis for . Now
Therefore a basis for cannot be a union of two or three cycles because the initial vector of each cycle is an eigenvector, and there do not exist two or more linearly independent eigenvectors. So the desired basis must consist of a single cycle of length 3. If is such a cycle, then determines a single Jordan block
which is a Jordan canonical form of T.
The end vector h(x) of such a cycle must satisfy . In any basis for , there must be a vector that satisfies this condition, or else no vector in satisfies this condition, contrary to our reasoning. Testing the vectors in , we see that is acceptable. Therefore
is a Jordan canonical basis for T.
In the next section, we develop a computational approach for finding a Jordan canonical form and a Jordan canonical basis. In the process, we prove that Jordan canonical forms are unique up to the order of the Jordan blocks.
Let T be a linear operator on a finite-dimensional vector space V, and suppose that the characteristic polynomial of T splits. By Theorem 5.10 (p. 277), T is diagonalizable if and only if V is the direct sum of the eigenspaces of T. If T is diagonalizable, then the eigenspaces and the generalized eigenspaces coincide.
For those familiar with the material on direct sums in Section 5.2, we conclude by stating a generalization of Theorem 5.10 for nondiagonalizable operators.
Theorem 7.8.
Let T be a linear operator on a finite-dimensional vector space V whose characteristic polynomial splits. Then V is the direct sum of the generalized eigenspaces of T.
Proof.
Exercise.
Exercises
-
Label the following statements as true or false.
-
Eigenvectors of a linear operator T are also generalized eigenvectors of T.
-
It is possible for a generalized eigenvector of a linear operator T to correspond to a scalar that is not an eigenvalue of T.
-
Any linear operator on a finite-dimensional vector space has a Jordan canonical form.
-
A cycle of generalized eigenvectors is linearly independent.
-
There is exactly one cycle of generalized eigenvectors corresponding to each eigenvalue of a linear operator on a finite-dimensional vector space.
-
Let T be a linear operator on a finite-dimensional vector space whose characteristic polynomial splits, and let be the distinct eigenvalues of T. If, for each is a basis for , then is a Jordan canonical basis for T.
-
For any Jordan block J, the operator has Jordan canonical form J.
-
Let T be a linear operator on an n-dimensional vector space whose characteristic polynomial splits. Then, for any eigenvalue of .
-
-
For each matrix A, find a basis for each generalized eigenspace of consisting of a union of disjoint cycles of generalized eigenvectors. Then find a Jordan canonical form J of A.
-
-
For each linear operator T, find a basis for each generalized eigenspace of T consisting of a union of disjoint cycles of generalized eigenvectors. Then find a Jordan canonical form J of T.
-
Define T on by .
-
V is the real vector space of functions spanned by the set of real-valued functions , and T is the linear operator on V defined by .
-
T is the linear operator on defined for all by , where . 1
-
for all .
-
-
† Let T be a linear operator on a vector space V, and let be a cycle of generalized eigenvectors that corresponds to the eigenvalue . Prove that is a T-invariant subspace of V. Visit goo.gl/
Lw4ahY for a solution. -
Let be cycles of generalized eigenvectors of a linear operator T corresponding to an eigenvalue . Prove that if the initial eigenvectors are distinct, then the cycles are disjoint.
-
Let T: be a linear transformation. Prove the following results.
-
-
-
If (so that T is a linear operator on V) and is an eigenvalue of T, then for any positive integer k
-
-
Let U be a linear operator on a finite-dimensional vector space V. Prove the following results.
-
-
If for some positive integer m, then for any positive integer .
-
If for some positive integer m, then for any positive integer .
-
Let T be a linear operator on V, and let be an eigenvalue of T. Prove that if for some integer m, then .
-
Second Test for Diagonalizability. Let T be a linear operator on V whose characteristic polynomial splits, and let be the distinct eigenvalues of T. Then T is diagonalizable if and only if for .
-
Use (e) to obtain a simpler proof of Exercise 24 of Section 5.4: If T is a diagonalizable linear operator on a finite-dimensional vector space V and W is a T-invariant subspace of V, then is diagonalizable.
-
-
Let T be a linear operator on a finite-dimensional vector space V whose characteristic polynomial splits and has Jordan canonical form J. Prove that for any nonzero scalar c, cJ is a Jordan canonical form for cT.
-
Let T be a linear operator on a finite-dimensional vector space V whose characteristic polynomial splits.
-
Prove Theorem 7.5(b).
-
Suppose that is a Jordan canonical basis for T, and let be an eigenvalue of T. Let . Prove that is a basis for .
-
-
Let T be a linear operator on a finite-dimensional vector space whose characteristic polynomial splits, and let be an eigenvalue of T.
-
Suppose that is a basis for consisting of the union of q disjoint cycles of generalized eigenvectors. Prove that .
-
Let be a Jordan canonical basis for T, and suppose that has q Jordan blocks with in the diagonal positions. Prove that .
-
-
Prove Corollary 2 to Theorem 7.7.
-
Let T be a linear operator on a finite-dimensional vector space V, and let be an eigenvalue of T with corresponding eigenspace and generalized eigenspace and , respectively. Let U be an invertible linear operator on V that commutes with T (i.e., ). Prove that and .
Exercises 13 and 14 are concerned with direct sums of matrices, defined in Section 5.4 on page 318.
-
Prove Theorem 7.8.
-
Let T be a linear operator on a finite-dimensional vector space V such that the characteristic polynomial of T splits, and let be the distinct eigenvalues of T. For each i, let be the Jordan canonical form of the restriction of T to . Prove that
is the Jordan canonical form of J.