
Non-Fragile Dynamic Output Feedback Control with Interval-Bounded Coefficient Variations
In Chapters 2 and 3, the non-fragile state feedback and dynamic output feedback control problems with norm-bounded uncertainties are studied, respectively. However, this kind of uncertainty cannot exactly describe the uncertain information due to the finite word length (FWL) effects. Correspondingly, the interval type of parameter uncertainty [89] can describe the uncertain information more exactly than the former type. But in the design process, due to the fact that the vertices of the set of interval uncertain parameters grow exponentially with the number of uncertain parameters, which may result in numerical problems in computation for systems with high dimensions. Moreover, similar to the case in which the problem of designing a globally optimal full-order output-feedback controller for polytopic uncertain systems is known to be a non-convex NP-hard optimization problem [76], the problem of designing full-order non-fragile dynamic output feedback H∞ controllers with an interval type of gain uncertainty is also a non-convex NP-hard one.
The purpose of this chapter is to design the controller which is assumed to be with additive gain variations of the interval type. And the full parameterized and sparse structured controllers are considered, respectively. For the full parameterized controller design problem, a two-step procedure is adopted to solve this non-convex problem. In Step 1, we give a design method of an initial controller gain Ck. In Step 2, with the controller gain Ck designed in Step 1, a linear matrix inequality (LMI)-based sufficient condition is given for the solvability of the non-fragile H∞ control problem, which requires checking all of the vertices of the set of uncertain parameters that grows exponentially with the number of uncertain parameters. It will be very difficult to apply the result to systems with high dimensions. To overcome the difficulty, a notion of a structured vertex separator is proposed to approach the problem, and is exploited to develop sufficient conditions for the non-fragile H∞ controller design in terms of solutions to a set of LMIs. The structured vertex separator method can significantly reduce the number of LMI constraints involved in the design conditions. For the sparse structured controller design problem, first, a class of sparse structures is specified from a given controller, which renders the resulting closed-loop system to be asymptotically stable and meet an H∞ performance requirement, but it is fully parameterized. Then, a three-step procedure for non-fragile H∞ controller design under the restriction of the sparse structure is provided. The contribution of this method is that it not only reduces the number of nontrivial parameters but also designs the sparse structured controllers with non-fragility. The resulting designs of the two cases guarantee that the closed-loop system is asymptotically stable and the H∞ performance from the disturbance to the regulated output is less than a prescribed level.
6.2 Non-Fragile H∞ Controller Design for Discrete-Time Systems
In this section, a two-step procedure is presented for solving the non-fragile H∞ control problem, and a comparison is made between the new proposed method and the existing method.
Consider a linear time-invariant (LTI) discrete-time system described by
x(k+1)=Ax(k)+B1ω(k)+B2u(k)z(k)=C1x(k)+D12u(k)y(k)=C2x(k)+D21ω(k) |
(6.1) |
where x(k) ∈ Rn is the state, u(k) ∈ Rq is the control input, ω(k) ∈ Rr is the disturbance input, y(k) ∈ Rp is the measured output, and z(k) ∈ Rm is the regulated output, respectively, and A, B1, B2, C1, C2, D12, and D21 are known constant matrices of appropriate dimensions.
To formulate the control problem, we consider a controller with gain variations of the following form:
ξ(k+1)=(Ak+ΔAk)ξ(k)+(Bk+ΔBk)y(k)u(k) =(Ck+ΔCk)ξ(k). |
(6.2) |
where ξ(k) ∈ Rn is the controller state, and Ak, Bk, and Ck are controller gain matrices of appropriate dimensions to be designed. ΔAk, ΔBk, and ΔCk represent the additive gain variations of the following interval types:
Remark 6.1 The additive gain variations model of form (6.3) is from Li [89], which has been extensively used to describe the FWL effects.
Let ek ∈ Rn, hk ∈ Rp, and gk ∈ Rq denote the column vectors in which the kth element equals one and the others equal zero. Then the gain variations of the form (6.3) can be described as:
ΔAk=n∑i=1n∑j=1θaijeieTj,ΔBk=n∑i=1p∑j=1θbijeihTj,ΔCk=q∑i=1n∑j=1θcijgieTj.
Applying controller (6.2) to system (6.1), this yields the closed-loop system:
xe(k+1)=Aexe(k)+Beω(k)z(k)=Cexe(k) |
(6.4) |
where xe(k)=[x(k)Tξ(k)t]T
Ae=[AB2(Ck+ΔCk)(Bk+ΔBk)C2Ak+ΔAk],Be=[B1Bk+ΔBkD21],Ce=[C1D12(Ck+ΔCk)].
Denote the transfer function from the disturbance ω to the controlled output z, corresponding to the state-space model (6.4), as
Gzω(z)=Ce(zI−Ae)−1Be.
This chapter addresses the following problem.
Non-fragile H∞ control problem with controller gain variations: Given a positive constant γ, find a dynamic output feedback controller of the form (6.2) with the gain variations (6.3) such that the resulting closed-loop system (6.4) is asymptotically stable and ‖Gzω(z)‖ < γ.
6.2.2 Non-Fragile H∞ Controller Design Methods
In this section, the non-fragile H∞ controller design method will be given by two steps. First, we will give the design method of the controller gain Ck. Then, with the designed controller gain Ck, the non-fragile H∞ controller design method is presented.
In the following, we focus on the problem of finding an initial feasible solution Ck to the non-fragile H∞ control problem.
Consider controller (6.2) with ΔAk = 0 and ΔBk = 0, which is described by
˙ξ(k)=Akξ(k)+Bky(k),u(k)=(Ck+ΔCk)ξ(k) |
(6.5) |
where ΔCk is considered with the following norm-bounded form:
ΔCk=McF3(t)Ec,
where
Mc=[Mc1⋯Mcnq],Ec=[ETc1⋯ETcnq]TMck=gi,Eck=eTjk=n2+np+(i−1)n+j, i=1,⋯,q, j=1,⋯,n
and FT3(t)F3(t)≤θ2aI
Combining controller (6.5) with system (6.1), we obtain the following closed-loop system:
˙xe(k)=Aedcxe(k)+Bedcω(k),z(k)=Cexe(k), |
(6.6) |
where
Aedc=[AB2(Ck+ΔCk)BkC2Ak],Bedc=[B1BkD21],
and Ce is the same as the one in (6.4).
Then the following theorem gives a design method of the initial controller gain Ck.
Theorem 6.1 Consider system (6.1), where γ > 0 and θa > 0 are constants. If there exist matrices ˆA,ˆB,ˆC,X>0,Y>0
then controller (6.5) with
Ak=(X−1−Y)−1(ˆA−YAX−ˆBC2X−YB2ˆC)X−1,Bk=(X−1−Y)−1ˆB, Ck=ˆCX−1 |
(6.8) |
solves the non-fragile H∞ control problem for system (6.1).
Proof 6.1 By Lemma 2.5, it is sufficient to shew that there exists a symmetric matrix P > 0 with the structure (2.11), such that
(6.9) |
Equation (6.9) can be further written as
(6.10) |
where
ˉQs=[−P0PAe0PBe0∗−ICe00∗∗−P0∗∗∗−γ2I],ΔM10=[00P[0B2ΔCk00]000[0D12ΔCk]000000000].
It is easy to see that
(6.11) |
where Σ1=[P[B2Mc0]D12Mc00],Σ2=[00[0Ec]0].
By Lemma 2.12, for any positive scalar εc, (6.10) holds if and only if the following inequality holds:
(6.12) |
By the Schur complement, (6.10) is equivalent to
(6.13) |
As in Scherer, Gahinet, and Chilali [113], partition P–1 as
(6.14) |
Due to the fact that P is with structure (2.11), it is easy to obtain X = M and X–1 = Y + N.
Similar to the method in Scherer, Gahinet, and Chilali [113], let Γ1=[X1X0] Denote ˉΓ=diag{Γ1,I,I,I,I},perform a congruence transformation with ˉΓ on (6.13) and with gain matrices (6.8), (6.13) is equivalent to (6.7). Thus, the proof is complete.
Remark 6.2 Theorem 6.1 shows that the non-fragile controller design problem with ΔAk = 0, ΔBk = 0, and ΔCk with the norm-bounded uncertainty can be converted into a convex one depending on a single parameter εc > 0.
Then, with the designed Ck we will give the non-fragile H∞ dynamic output feedback controller design method in the following.
To facilitate the presentation, we denote
M0(ΔAk,ΔBk,ΔCk)=[Ξ1Ξ20Ξ4STASTB1∗Ξ30Ξ5Ξ6Ξ7∗∗−IΞ8C10∗∗∗−ˉP11−ˉP120∗∗∗∗−ˉP220∗∗∗∗∗−γ2I] |
(6.15) |
where
Ξ1=ˉP11−S−ST,Ξ2=ˉP12−S−ST,Ξ3=ˉP22−S−ST+N+NT,Ξ4=STA+STB2(Ck+ΔCk)Ξ5=(S−N)TA+FBC2+NTΔBkC2+FA +NTΔAk+(S−N)TB2(Ck+ΔCk),Ξ6=(S−N)TA+FBC2+NTΔBkC2,Ξ7=(S−N)TB1+FBD21+NTΔBkD21,Ξ8=C1+D12(Ck+ΔCk). |
(6.16) |
Then the following theorem presents a sufficient condition for the solvability of the non-fragile H∞ control problem with additive uncertainty.
Theorem 6.2 Consider system (6.1). Let scalars γ > 0, θa > 0 and gain matrix Ck be given. If there exist matrices FA, FB, S, N, ˉP12, and ˉP11>0,ˉP22>0, such that the following LMIs hold:
M0(ΔAk,ΔBk,ΔCk)<0,θaij,θbik,θclj∈{−θa,θa},i,j=1,...,n;k=1,...,p;l=1,...,q, |
(6.17) |
then controller (6.2) with additive uncertainty described by (6.3), Ck, and
(6.18) |
solves the non-fragile H∞ control problem for system (6.1).
Proof 6.2 By Lemma 2.5, it is sufficient to show that there exist a matrix G with structure (2.14) and a symmetric positive matrix P=[P11P12PT12P22]>0 such that
(6.19) |
holds for all θaij, θbik, and θclj satisfying (6.3).
Denote
S=Y+N, Γ1=[III0],ˉΓ1=diag{Γ1,I,Γ1,I},ˉP11=P11+P12+PT12+P22,ˉP12=P11+PT12,ˉP22=P11.
Then (6.19) is equivalent to
M2=ˉΓ1M1ˉΓT1=[Ξ1Ξ20Ξ4STASTB1∗Ξ30Π1Π2Π3∗∗−IΞ8C10∗∗∗−ˉP11−ˉP120∗∗∗∗−ˉP220∗∗∗∗∗−γ2I]<0 |
(6.20) |
which holds for all θaij, θbik, and θcij satisfying (6.3), where Ξ1,Ξ2,Ξ3,Ξ4 are defined by (6.16), and
Π1=(S−N)TA+NTBkC2+NTΔBkC2+NTAk+NTAk+(S−N)TB2(Ck+ΔCk),Π2=(S−N)TA+NTBkC2+NTΔBkC2,Π3=(S−N)TB1+NTBkD21+NTΔBkC21.
By (6.18), (6.19), and the Schur complement, it concludes that (6.20) is equivalent to (6.17).
Thus, the proof is complete.
Remark 6.3 Theorem 6.2 presents a sufficient condition in terms of solutions to a set of LMIs for the solvability of the non-fragile H∞ control problem. By the proofs of Theorem 6.2 and Lemma 2.5, Theorem 6.2 also shows that the non-fragile H∞ control problem becomes a convex one when the gain matrix Ck is known and the state-space realizations of the designed controllers with gain variations admit the slack variable matrix G with the structure of (2.14).
However, for the non-fragile H∞ controller design method, it should be noted that the number of LMIs involved in (6.17) is 2n2+np+nq, which results in the difficulty of implementing the LMI constraints in computation. For example, when n = 6 and p = q = 1, the number of LMIs involved in (6.17) is 248, which already exceeds the capacity of the current LMI solver in MATLAB. To overcome the difficulty arising from implementing the design condition given in Theorem 6.2, the following method is developed.
Denote
(6.21) |
where la = n2 + np + nq, and
fa1k=[01×n(NTei)T01×q01×n01×n01×r]T,fa2k=[01×n01×n01×qeTj01×n01×r],for k=(i−1)n+j,i,j=1,⋯,n.fa1k=[01×n(NTei)T01×q01×n01×n01×r]T,fa2k=[01×n01×n01×qhTjC2hTjC2hTjD21],for k=n2+(i−1)p+j,i=1,⋯,n,j=1,⋯,p.fa1k=[(STB2gi)T((S−N)TB2gi)T(D12gi)T01×n01×n01×r]T,fa2k=[01×n01×n01×qeTj01×n01×r],for k=n2+np+(i−1)n+j,i=1,⋯,q,j=1,⋯,n.
Let k0, k1, …, kSa be integers satisfying
k0=0<k1<⋯<ksa=la
and matrix Σ have the following structure:
Σ=[diag[σ111⋯σsa11]diag[σ112⋯σsa12]diag[σ112⋯σsa12]Tdiag[σ122⋯σsa22]], |
(6.22) |
where σi11,σi12, and σi22∈R(ki−ki−1)×(ki−ki−1),i=1,⋯,sa. Then, we have the following theorem.
Theorem 6.3 Consider system (6.1). Let scalars γ > 0, θa > 0, and gain matrix Ck be given. If there exist matrices FA, FB, S, N, ˉP12, ˉP11>0, ˉP22>0, and symmetric matrix Σ with the structure described by (6.22) such that the following LMIs hold:
(6.23) |
[Idiag[θki−1+j⋯θki]]T[σi11σi12(σi12)Tσi22]×[Idiag[θki−1+j⋯θki]]T≥0,for all θki−1+j∈{−θa,θa},j=1,⋯,ki−ki−1,i=1,⋯,sa, |
(6.24) |
where
Q=[Ξ1Ξ20Ψ1STASTB∗Ξ30Ψ2Ψ3Ψ4∗∗−IC1+D12CkC10∗∗∗−ˉP11−ˉP120∗∗∗∗−ˉP220∗∗∗∗∗−γ2I] |
(6.25) |
with Ξ1, Ξ2, Ξ3 defined by (6.16) and
Ψ1=STA+STB2CkΨ2=(S−N)TA+FBC2+FA+(S−N)TB2Ck,Ψ3=(S−N)TA+FBC2,Ψ4=(S−N)TB1+FBD21,
then controller (6.2) with additive uncertainty described by (6.3) and the controller gain parameters given by (6.18) solve the non-fragile H∞ control problem for system (6.1).
Proof 6.3 By (6.15), we have
(6.26) |
where
ΔQ=[000ΔQ100000ΔQ2ΔQ3ΔQ4000ΔQ500000000000000000000]
with
ΔQ1=STB2q∑i=1n∑j=1θcijgieTj,ΔQ2=n∑i,j=1θaijNTeieTj+n∑i=1q∑j=1θbijNTeihTjC2+(S−N)TB2q∑i=1n∑j=1θcijgieTj,ΔQ3=n∑i=1p∑j=1θbijNTeihTjC2,ΔQ4=n∑i=1p∑j=1θbijNTeihTjD21,ΔQ5=D12q∑i=1n∑j=1θcijgjeTj.
By (6.21) and (6.26), it follows that (6.17) is equivalent to
M0=Q+∑lai=1θifa1ifa2i+(∑lai=1θifa1ifa2i)T=Q+Fa1˜ΔaFa2+(Fa1˜ΔaFa2)T<0 |
(6.27) |
which holds for all |θi| ≤ θa, where ˜Δa=diag[θ1,⋯,θla]. By Lemma 2.5, it follows that (6.27) holds if and only if there exists a symmetric matrix Σ ∈ Rla × la such that (6.23) and
(6.28) |
hold for all θi ∈ {-θa, θa}, i = 1,…, la. Notice that the set of Σ satisfying (6.22) is a subset of the set of Σ satisfying (6.28), hence the conclusion follows.
Remark 6.4 From the proof of Theorem 6.3, it follows that when sa = 1, the set of Σ satisfying (6.22) is equal to the set of Σ satisfying (6.28), and the design conditions given in Theorem 6.3 and Theorem 6.2 are equivalent. Σ satisfying (6.23) and (6.28) (or (6.24) with sa = 1) is said to be a vertex separator [67]. Notice that the number of LMIs involved in (6.28) or (6.24) with sa = 1 still is 2n2 + np + nq, so that the difficulty of implementing the LMI constraints remains. To overcome the difficulty, Theorem 6.3 presents a sufficient condition for the non-fragile H∞ controller design in terms of separator Σ with the structure described by (6.22), where the number of LMIs involved in (6.24) is ∑Sai=12ki−ki−1,, which can be controlled not to grow exponentially by reducing the value of max ki–ki–1 : i = 1,…, sa. Compared with the Σ being of full block in (6.23) and (6.28), Σ with the structure described by (6.22) satisfying (6.23) and (6.24) is said to be a structured vertex separator. However, it should be noted that the design condition given in Theorem 6.3 may be more conservative than that given in Theorem 6.2 because of the structure constraint on Σ. But the smaller the value of sa is, the less conservativeness is introduced.
To illustrate the comparison between the proposed method and the existing design method, the result of a non-fragile H∞ controller design with norm-bounded gain variations is introduced in the following.
Similar to Yang, Wang, and Lin [149] and Mahmoud [103] for non-fragile problems with norm-bounded uncertainty, the norm-bounded type of gain variations ΔAk, ΔBk, and ΔCk can be over-bounded [107] by the following norm-bounded uncertainty:
(6.29) |
where
Ma=[Ma1⋯Man2],Ea=[ETa1⋯ETan2]T,Mb=[Mb1⋯Mbnp],Eb=[ETb1⋯ETbnp]T,Mc=[Mc1⋯Mcnq],Eb=[ETc1⋯ETcnq]T,
with
Mak=ei,Eak=eTjfor k=(i−1)n+j,i,j=1,⋯,n,Mbk=ei,Ebk=hTjfor k=n2+(i−1)p+j,i=1,⋯,n,j=1,⋯,p,Mck=gi,Eck=eTjfor k=n2+np+(i−1)n+j,i=1,⋯,q,j=1,⋯,n
and FTi(t)Fi(t)≤θ2aI for i = 1, 2, 3, represent the uncertain parameters, here, θa is the same as before.
Noting that the problem of non-fragile dynamic output feedback H∞controller design with norm-bounded gain variations is also a non-convex problem, and similar to Theorem 6.3, when the controller gain Ck is known, it can be converted to a convex one.
To facilitate the presentation, denote
ˉFA=ˉNAk,ˉFB=ˉNAB,
Ma1=[0ˉSB2Mc0ˉNMa(ˉS−ˉN)B2McˉNMb0D12Mc0000000000],
Ma2=[000Ea00000Ec00000EbC2EbC2EbD21].
Assume that Ck is known, by using the method in Yang, Wang, and Lin [149] and Mahmoud [103], the non-fragile H∞ controller design with norm-bounded gain variations is reduced to solve the following LMI:
(6.30) |
with matrix variables ˉS>0,ˉN<0, and scalar ε > 0, where
ˉQ=[−ˉS−ˉS0ˉS(A+B2Ck)ˉSAˉSB∗−ˉS+N0Q1Q2Q3∗∗−IC1+D12CkC10∗∗∗−ˉS−ˉS0∗∗∗∗−ˉS+ˉN0∗∗∗∗∗−γ2I],
with
Q1=(ˉS−ˉN)(A+B2Ck)+ˉFA+FBC2,Q2=(ˉS−ˉN)A+ˉFBC2,Q3=(ˉS−ˉN)B1+ˉFBD21.
The following lemma will show the relationship between condition (6.30) and the condition for designing non-fragile H∞ controllers given in Theorem 6.3.
Lemma 6.1 Consider system (6.1). If condition (6.30) is feasible, then the condition for designing non-fragile H∞ controllers given in Theorem 6.3 is feasible.
Proof 6.4 To proceed, let ˉS=ˉP11=ˉP12=S,ˉN=N,ˉS−ˉN=ˉP22>0. It is easy to see that ˉQ=Q,Ma1=Fa1, and Ma2 = Fa2, that is, condition (6.30) becomes
(6.31) |
In Theorem 6.3, when sa = la, according to (6.31) and FTi(t)Fi(t)≤θ2aI, i = 1, 2, 3, and by the Schur complement, there exists Σ with the structure
(6.32) |
such that the following LMIs hold:
(6.33) |
[Iθi]T[σi11σi12(σi12)Tσi22][Iθi]=εθ2a−εθ2i≥0,for all i=1,⋯,la. |
(6.34) |
Thus, the proof is complete.
Remark 6.5 From the proof of Lemma 6.1, it follows that condition (6.30) is more conservative than the non-fragile H∞ controller existence condition in Theorem 6.3 with sa = la. However, as indicated in Remark 6.4, the case of sa = la is the worst case of the new proposed method. So the existing nonfragile H∞ controller design method with the norm-bounded gain variations is more conservative than the one given by Theorem 6.3.
Combining Theorem 6.1 and Theorem 6.3, a two-step procedure is summarized as follows:
Algorithm 6.1
Step 1. Minimize γ subject to X > 0, Y > 0, and LMI (6.7). Denote the optimal solutions as X = Xopt and ˆC=ˆCopt. Then by (6.8), Ckopt=ˆCoptX−1opt.
Step 2. Let Ck = Ckopt, minimize γ subject to FA, FB, N, S, ˉP12, ˉP11>0, ˉP22>0, and LMIs (6.23) and (6.24). Denote the optimal solutions as N = Nopt, FA = FAopt, and FB = FBopt. Then according to (6.18), we obtain Ak = (NT)–1 FAopt, Bk = (NT)–1FBopt. The resulting Ak, Bk, and Ck will form the non-fragile dynamic output feedback H∞ controller gains.
In Theorem 6.3, we restrict the slack variable matrix G with the structure (2.14) for obtaining the convex design condition, which may result in more conservative evaluation of the H∞ performance index bound. So, in this section, for a designed controller, the matrix G without the restriction is exploited for obtaining less conservative evaluation of the H∞ performance index bound.
When the controller parameter matrices Ak, Bk, and Ck are known, the problem of minimizing γ subject to (6.3) for a given θa > 0 and ‖Gzω(z) ‖ < γ can be converted into the one: minimize γ2 subject to the following LMIs:
[P−G−GT0GTAeGTBe∗−ICe0∗∗−P0∗∗∗−γ2I]<0,θaij,θbik,θclj∈{−θa,θa},i,j=1,⋯,n; k=1,⋯,p; l=1,⋯,q, |
(6.35) |
where Ae, Be, and Ce are defined as in (6.4).
Similar to the design condition given in Theorem 6.2, the design condition given by (6.35) is also with the numerical computation problem. To solve the problem, the following lemma provides a solution using the structured vertex separator approach.
Denote
(6.36) |
where
ga1k=[(01×neTi)G01×q01×2n01×r]T,ga2k=[01×2n01×q01×neTi01×n],for k=(i−1)n+j,i,j=1,⋯,n.ga1k=[(01×neTi)G01×q01×2n01×r]T,ga2k=[01×2n01×qhTjC201×nhTjD21],for k=n2+(i−1)p+j, i=1,⋯,n,j=1,⋯,p.ga1k=[((B2gi)T01×n)G(D12gi)T01×2n01×r]T,ga2k=[01×2n01×q01×neTi01×n],for k=n2+np+(i−1)n+j, i=1,⋯,q,j=1,⋯,n.
Then we have the following lemma.
Lemma 6.2 Consider system (6.1). Let γ > 0, θa > 0 be constants, and let controller parameter matrices Ak, Bk, and Ck be given. Then ‖Gzω ‖ < γ holds for all θaij, θbit, and θcij satisfying (6.3), if there exist a matrix G, a positive-definite matrix P > 0, and a symmetric matrix Σ with the structure described by (6.22) such that (6.24) and the following LMI hold:
(6.37) |
where
Qs=[P−G−GT0GTAe0GTBe0∗−ICe00∗∗−P0∗∗∗−γ2I]
with Ae0, Be0, and Ce0 defined by (2.8).
Proof 6.5 By using (6.35) and (6.36), it is similar to the proof of Theorem 6.3, and omitted here.
Remark 6.6 For evaluating the H∞ performance bound of the transfer function from ω to z, the condition given in Lemma 6.2 usually is less conservative than that given in Theorem 6.3 because no structure constraint on the slack variable matrix G in Lemma 6.2 is imposed.
In the following, an example is given to illustrate the effectiveness of the proposed methods. At the same time, a comparison is made between the proposed non-fragile H∞ controller design method and the existing non-fragile H∞ controller design method.
Consider a discrete-time linear system of the form (6.1) with
A=[0−100.5−110.5−11],B1=[−0.50−0.50−10],B2=[11−1],C1=[1−1−1000],C2=[−11−3],D21=[01],D21=[01].
By the standard H∞ controller design method [24], we obtain the optimal H∞ performance index for the system as γopt = 2.1622.
On the other hand, assume that the designed controller is with form (6.5). Let θa = 0.05, by Theorem 6.1 with εc = 155.9999, and we obtain
Ckini=[0.2573−0.23510.3380].
Here εc is obtained by searching such that the H∞ performance index is optimal. θa is chosen large appropriately such that the designed Ckini can guarantee that Step 2 is feasible.
First, we design an H∞ controller by condition (6.30) with Ck = Ckini.
Assume that the designed controller is with norm-bounded additive uncertainties described by (6.29), by applying condition (6.30) with θa = 0.006 to design a non-fragile controller. The obtained gains are given by
Aknm=[0.3855−1.38500.70020.2214−1.22230.7067−0.1037−0.5537−0.4515],Bknm=[0.0766−0.0874−0.4793]T,
and the H∞ performance index of the obtained non-fragile controller is 2.8645.
Then, in the following, we design an H∞ controller by Theorem 6.3 with Ck = Ckini.
Assume that the designed controller is with the additive uncertainties described by (6.3). For this case with Ck = Ckini, it is difficult to apply Theorem 6.2 to design a non-fragile H∞ controller because the number of the LMI constraints involved in (6.17) is 215. However, Theorem 6.3 is applicable for solving this problem. By applying Theorem 6.3 with θa = 0.006 and ki = i, i = 1,…, 15, that is, sa = 15 as well as ki = 3i, i = 1,…, 5, that is, sa = 5 to design a non-fragile H∞ controller, the obtained gains are as follows.
TABLE 6.1
Performance Index by Design with θa = 0.006
Condition (6.30) |
Theorem 6.3 (sa = 15) |
Theorem 6.3 (sa = 5) |
|
γ |
2.8645 |
2.5204 |
2.5099 |
For sa = 15,
Ak=[0.3270−1.38940.55480.1699−1.23360.5885−0.1696−0.5686−0.6114],Bk=[−0.0027−0.1566−0.5843]T.
For sa = 5,
Ak=[0.3261−1.38720.55320.1699−1.23360.5885−0.1696−0.5686−0.6114],Bk=[−0.0027−0.1566−0.5843]T.
Correspondingly, the H∞ performance indexes of the obtained non-fragile controllers are γ = 2.5204 and γ = 2.5099, respectively.
In this part, for the above designed controllers, we will illustrate that Lemma 6.2 can give better evaluations of the H∞ performance index bounds.
First, to facilitate the presentation, denote the controller designed by condition (6.30) as Knm and denote the controllers designed by Theorem 6.3 as Kin15 (sa = 15) and Kin5 (sa = 5).
By Lemma 6.2, the H∞ performance indices of the controller Knm are γ = 2.6507 (sa = 15) and γ = 2.6501 (sa = 5) while the H∞ performance indices of the controllers Kin15 and Kin5 are γ = 2.4934 (sa = 15) and γ = 2.4903 (sa = 5), respectively.
Here, tables are given to provide a comparison between two methods.
First, Table 6.1 shows the H∞ performance indices achieved by the designs of the existing method (Condition (6.30)) and the proposed method (Theorem 6.3).
From Table 6.1, it is easy to see that compared with the optimal H∞ performance index bound γopt = 2.1622, the performance index of the controller designed by condition (6.30) is degraded 32.48%. The performance indices of the controllers designed by Theorem 6.3 are degraded 16.57% (sa = 15) and 16.08% (sa = 5), which are much more improved than 32.48%.
Second, for the designed non-fragile controllers, Lemma 6.2 gives better performance indices shown in Table 6.2.
Obviously, compared with γopt = 2.1622, by using Lemma 6.2, the H∞ performance indices of the controller Knm are degraded 22.59% for sa = 15 and degraded 22.56% for sa = 5. In contrast, the performance indices for the controllers Kin15 and Kin5 are degraded 15.32% for sa = 15 and 15.17% for sa = 5, respectively. The result shows the advantage of the new proposed method.
TABLE 6.2
Performance Evaluation by Lemma 6.2 with θa = 0.006
Knm |
Kin15 |
Kin5 |
|
γ(sa = 15) |
2.6507 |
2.4934 |
— |
γ(sa = 5) |
2.6501 |
— |
2.4903 |
Finally, we will give a simulation to illustrate the effectiveness of the proposed method.
Let x(0)=[−1−0.50.5]T,ξ(0)=[−0.5−0.50.5]T, and let the disturbance ω(k) be
ω(k)={[−5−5],21≤t≤40(step),0otherwise.
Then Figure 6.1 shows the regulated output responses of z1 controlled by the non-fragile controllers designed by the existing method (condition (6.30)) and the proposed method (Theorem 6.3) with sa = 15, respectively. The responses of z2 controlled by the two non-fragile controllers are shown in Figure 6.2.

FIGURE 6.1
Comparison of the regulated output responses of z1(t) with θa = 0.006.
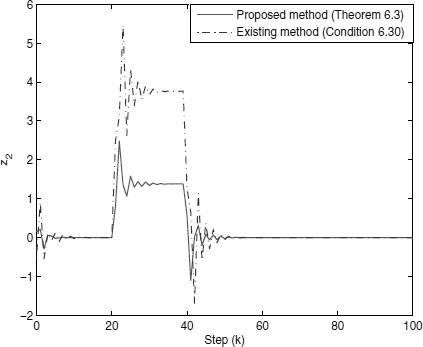
FIGURE 6.2
Comparison of the regulated output responses of z2(t) with θa = 0.006.
From this example, we can see that the worst case (sa = 15) of Theorem 6.3 also is more effective than the non-fragile Hcontroller existence condition (6.30).