In the previous chapter, we learned how to control visibility of Linux processes by using namespaces and learned how they are realized within the kernel. In this chapter, we touch upon another important aspect—resource control—which enables us to apply quotas to various kernel resources.
We learned about namespaces so we could restrict the visibility of resources for processes, which we did by putting the processes in separate namespaces. We also covered the data structures involved in the kernel, to get an understanding of how a namespace is realized within the Linux kernel.
Now we ask ourselves the question, as to whether restricting visibility is good enough for virtualization or do we need more. Assume we run tenant1 processes in one namespace and tenant2 processes in a separate namespace. Although the processes can’t access each other’s resources (mount points, process trees, and so on), as those resources are scoped to the individual namespace, we don’t achieve true isolation just via this scoping.
As an example, what stops tenant1 from launching a process that possibly could hog the CPU via an infinite loop? Flawed code can keep leaking memory (say, for example, it takes a big chunk of the OS page cache). A misbehaving process can create tons of processes via forking, launch a fork bomb, and crash the kernel.
This means we need a way to introduce resource controls for processes within the namespace. This is achieved using a mechanism called control groups, commonly known as cgroups. cgroups work on the concept of cgroup controllers and are represented by a file system called cgroupfs in the Linux kernel.
The version of cgroups currently being used is cgroup v2. We explore some details about how cgroups work as well as some of the cgroup controllers seen in the kernel code. We also look at how the cgroups are realized within the Linux kernel. But before that, let’s briefly see what cgroups are all about.
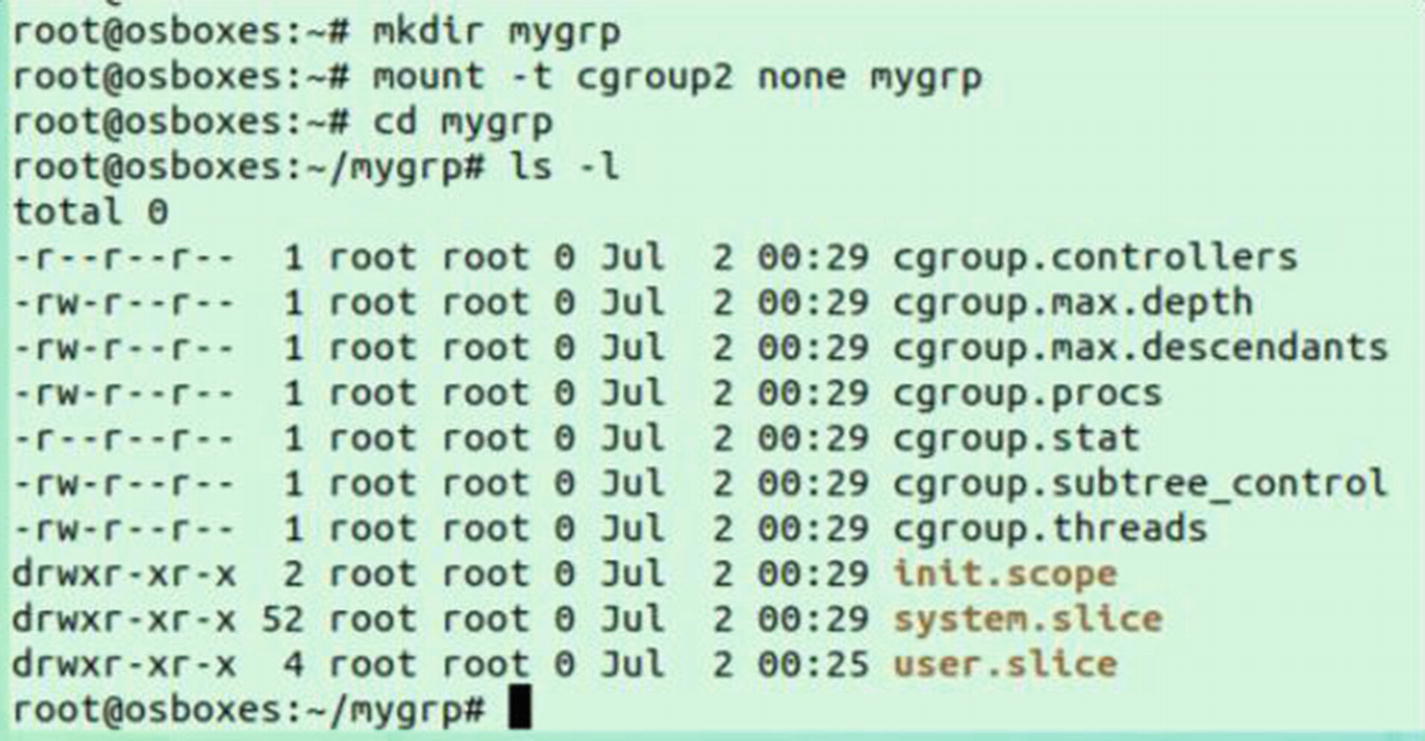
First, to use the cgroup, we need to mount the cgroup file system at a mount point, as follows:
mount -t cgroup2 none $MOUNT_POINT
The difference between cgroup version v1 and v2 is that, while mounting in v1, we could have specified the mount options to specify the controllers to enable, while in cgroup v2, no such mount option can be passed.
Creating a Sample cgroup
Let’s create a sample cgroup called mygrp. To create a cgroup, we first need to create a folder where the cgroup artifacts are stored, as follows:
mkdir mygrp
Now we can create a cgroup using the following command (Note: cgroup2 is supported in kernel version 4.12.0-rc5 onward. I am working on Ubuntu 19.04, which has kernel version Ubuntu 19.04 with Linux kernel 5.0.0-13.)
mount -t cgroup2 none mygrp
We created a directory called mygrp and then mounted the cgroup v2 file system on it. When we navigate inside the mygrp directory, we can see multiple files there:
cgroup.controllers: This file contains the supported controllers. All controllers that are not mounted on cgroup v1 will show up. Currently on my system, I have a cgroup v1 mounted by systemd. We can see that all the controllers are there.
Only after unmounting the controllers from v1 should v2 show these controllers. Sometimes we might need to add the kernel boot parameter systemd.unified_cgroup_hierarchy=1 and reboot the kernel to make these changes effective. After making the changes on my machine, I see the following controllers:
Cgroup.procs: This file contains the processes within the root cgroup. No PIDs will be there when the cgroup is freshly created. By writing the PIDs to this file, they become part of the cgroup.
Cgroup.subtree_control: This holds controllers that are enabled for the immediate subgroup.
Enabling and disabling controllers in the immediate subgroups of a parent is done only by writing into its cgroup.subtree_control file. So, for example, enabling the memory controller is done using this:
echo "+memory" > mygrp/cgroup.subtree_control
And disabling it is done using this:
echo "-memory" > mygrp/cgroup.subtree_control
cgroup.events: This is the cgroup core interface file. This interface file is unique to non-root subgroups. The cgroup.events file reflects the number of processes attached to the subgroup, and it consists of one item—populated: value. The value is 0 when there are no processes attached to that subgroup or its descendants, and 1 when there are one or more processes attached to that subgroup or its descendants.
Apart from these files, controller-specific interface files are also created. As an example, for memory controllers, a memory.events file is created, which can be monitored for events like OOM. Similarly, a PID controller has files like pids.max to avoid situations like a fork bomb.
In my example, I go ahead and create a child cgroup under mygrp. We can see the following files under the child directory:
We can see controller-specific files like memory.max. The interface file called memory.events lists the different events like oom, which can be enabled and disabled.
The next section explains how cgroups are implemented within the kernel and how they enable resource control.
Cgroup Types
There are different types of cgroups, based on which resources we want to control. Two of the cgroups we will cover are as follows:
CPU: Provides CPU limits to user space processes
Block I/O: Provides I/O limits on block devices for user space processes
CPU Cgroup
From the kernel perspective, let’s see how a cgroup is realized. CPU cgroups can be realized on top of two schedulers:
Completely fair scheduler
Real-time scheduler
In this chapter, we discuss only the completely fair scheduler (CFS).
The CPU cgroup provides two types of CPU resource control:
cpu.shares: Contains an integer value that specifies a relative share of CPU time available to the tasks in a cgroup. For example, tasks in two cgroups that have cpu.shares set to 100 will receive equal CPU time, but tasks in a cgroup that have cpu.shares set to 200 receive twice the CPU time of the tasks in a cgroup where cpu.shares is set to 100. The value specified in the cpu.shares file must be 2 or higher.
cpu.cfs_quota_us: Specifies the total amount of time in microseconds (μs, represented here as “us”) for which all tasks in a cgroup can run during one period (as defined by cpu.cfs_period_us). As soon as tasks in a cgroup use all the time specified by the quota, they are stopped for the remainder of the time specified by the period and not allowed to run until the next period.
Cpu.cfs_period_us: It is the period from which CPU quotas for cgroups (cpu.cfs_quota_us) are carved out and the quota and period parameters operate on a per CPU basis. Consider these examples:
To allow the cgroup to be able to access a single CPU for 0.2 seconds of every second, set the cpu.cfs_quota_us to 200000 and cpu.cfs_period_us to 1000000.
To allow a process to utilize 100% of a single CPU, set cpu.cfs_quota_us to 1000000 and cpu.cfs_period_us to 1000000.
To allow a process to utilize 100% of two CPUs, set cpu.cfs_quota_us to 2000000 and cpu.cfs_period_us to 1000000.
To understand both of these control mechanisms, we can look into the aspects of the Linux CFS task scheduler. The aim of this scheduler is to grant a fair share of the CPU resources to all the tasks running on the system.
We can break up these tasks into two types:
CPU-intensive tasks: Tasks like encryption, machine learning, query processing, and so on
I/O-intensive tasks: Tasks that are using disk or network I/O like DB clients
The scheduler has the responsibility of scheduling both kinds of tasks. The CFS uses a concept of a vruntime. vruntime is a member of the sched_entity structure, which is a member of the task_struct structure (each process is represented in Linux by a task_struct structure):
struct task_struct {
int prio, static_prio, normal_prio; unsigned int rt_priority;
struct list_head run_list;
const struct sched_class *sched_class;
struct sched_entity se;
unsigned int policy; cpumask_t cpus_allowed; unsigned int time_slice;
}
struct sched_entity {
/* For load-balancing: */
struct load_weight load;
struct rb_node run_node;
struct list_head group_node;
unsigned int on_rq;
u64 exec_start;
u64 sum_exec_runtime;
u64 vruntime;
u64 prev_sum_exec_runtime;
u64 nr_migrations;
struct sched_statistics statistics;
#ifdef CONFIG_FAIR_GROUP_SCHED
Int depth;
struct sched_entity *parent;
/* rq on which this entity is (to be) queued: */
struct cfs_rq *cfs_rq;
/* rq "owned" by this entity/group: */
struct cfs_rq *my_q;
/* cached value of my_q->h_nr_running */
unsigned long runnable_weight;
The task_struct has a reference to sched_entity, which holds a reference to vruntime.
vruntime is calculated using these steps:
1.
Compute the time spent by the process on the CPU.
2.
Weigh the computed running time against the number of runnable processes.
The function first calculates the delta_exec, which is the time spent by the current task on the CPU.
This delta_exec is then passed as a parameter to another function call, named calc_delta_fair.
This call will return the weighted value of the process runtime in relation to the number of runnable processes. Once vruntime is calculated, it’s stored as part of the sched_entity structure.
Also, as part of updating the vruntime for the task, the update_curr function calls update_min_vruntime. This calculates the smallest value of vruntime among all runnable processes and adds it to a red black tree as the leftmost node. The CFS scheduler can then look into the red black tree to schedule the process that has the lowest vruntime.
Basically, the CFS scheduler schedules its heuristic’s schedules and I/O-intensive tasks more frequently, but gives more time to the CPU-intensive tasks in a single run. This also could be understood from the vruntime concept discussed previously. Since I/O tasks are mostly waiting for network/disk, their vruntimes tend to be smaller than CPU tasks. That means the I/O tasks will be scheduled more frequently. The CPU-intensive tasks will get more time once they are scheduled to do the work. This way, CFS tries to attain a fair scheduling of tasks.
Let’s stop for a minute and think about a potential problem this scheduling could lead to.
Assume you have two processes, A and B, belonging to different users. These processes each get 50% share of the CPU. Now say a user owning process A launches another process, called A1. Now CFS will give a 33% share to each process. This effectively means that users of process A and A1 now get 66% of the CPU. A classic example is a database like PostgreSQL, which creates processes per connection. As connections grow, the number of processes grow. If fair scheduling is in place, each connection would tend to take away the share of the other non-Postgre processes running on the same machine.
This problem led to what we call group scheduling. To understand this, let’s look at other kernel data structure:
/* CFS-related fields in a runqueue */
struct cfs_rq {
struct load_weight load;
unsigned int nr_running;
unsigned int h_nr_running; /* SCHED_{NORMAL,BATCH,IDLE} */
unsigned int idle_h_nr_running; /* SCHED_IDLE */
u64 exec_clock;
u64 min_vruntime;
#ifndef CONFIG_64BIT
u64 min_vruntime_copy;
#endif
struct rb_root_cached tasks_timeline;
/*
* 'curr' points to currently running entity on this cfs_rq.
* It is set to NULL otherwise (i.e. when none are currently running).
*/
struct sched_entity *curr;
struct sched_entity *next;
struct sched_entity *last;
struct sched_entity *skip;
This structure holds the number of runnable tasks in the nr_running member. The curr member is a pointer to the current running scheduling entity or the task.
Also, the sched_entity is now represented as a hierarchical data structure:
struct sched_entity {
/* For load-balancing: */
struct load_weight load;
struct rb_node run_node;
struct list_head group_node;
unsigned int on_rq;
u64 exec_start;
u64 sum_exec_runtime;
u64 vruntime;
u64 prev_sum_exec_runtime;
u64 nr_migrations;
struct sched_statistics statistics;
#ifdef CONFIG_FAIR_GROUP_SCHED
Int depth;
struct sched_entity *parent;
/* rq on which this entity is (to be) queued: */
struct cfs_rq *cfs_rq;
/* rq "owned" by this entity/group: */
struct cfs_rq *my_q;
/* cached value of my_q->h_nr_running */
unsigned long runnable_weight;
#endif
#ifdef CONFIG_SMP
/*
* Per entity load average tracking.
*
* Put into separate cache line so it does not
* collide with read-mostly values above.
*/
struct sched_avg avg;
#endif
};
This means there can now be sched_entities that are not associated with a process (task_struct). Instead, these entities can represent a group of processes. Each sched_entity now maintains a run queue of its own. A process can be moved to the child schedule entity, which means it will be part of the run queue that the child schedule entity has. This run queue can represent the processes in the group.
The code flow in scheduler would do the following.
Pick_next_entity is called to pick up the best candidate for scheduling. We assume that there is only one group running at this time. This means that the red black tree associated with the sched_entity process is blank. The method now tries to get the child sched_entity of the current sched_entity. It checks the cfs_rq, which has the processes of the group enqueued. The process is scheduled.
The vruntime is based on the weights of the processes within the group. This allows us to do fair scheduling and prevent processes within a group from impacting the CPU usage of processes within other groups.
Once we understand that processes can be placed into groups, let’s see how bandwidth enforcement can be applied to the group. Another data structure called cfs_bandwidth, defined in sched.h, plays a role:
struct cfs_bandwidth {
#ifdef CONFIG_CFS_BANDWIDTH
raw_spinlock_t lock;
ktime_t period;
u64 quota;
u64 runtime;
s64 hierarchical_quota;
u8 idle;
u8 period_active;
u8 distribute_running;
u8 slack_started;
struct hrtimer period_timer;
struct hrtimer slack_timer;
struct list_head throttled_cfs_rq;
/* Statistics: */
Int nr_periods;
Int nr_throttled;
u64 throttled_time;
#endif
};
This structure keeps track of the runtime quota for the group. The cff_bandwith_used function is used to return a Boolean value when the check is made in the account_cfs_rq_runtime method of the fair scheduler implementation file. If no runtime quota remains, the throttle_cfs_rq method is invoked. It will dequeue the task from the run queue of the sched_entity and set the throttled flag. The function implementation is shown here:
* If we're the first throttled task, make sure the bandwidth
* timer is running.
*/
if (empty)
start_cfs_bandwidth(cfs_b);
raw_spin_unlock(&cfs_b->lock);
}
This explains how the CPU cgroups allow tasks/processes to be grouped and can use the CPU shares mechanism to enforce fair scheduling within a group. This also explains how quota and bandwidth enforcement is accomplished within a group. We now discuss the other cgroup type, which enforces resource limits on block I/O.
Block I/O cgroups
The purpose of the block I/O cgroup is twofold:
Provides fairness to the individual cgroup: Makes use of a scheduler called completely fair queuing.
Does block i/o throttling: Enforces a quota on the block I/O (bytes as well as iops) per cgroup.
Before delving into details of how the cgroup for block I/O is implemented, we’ll take a small detour to investigate how the Linux block I/O works. Figure 4-1 is a high-level block diagram of how the block I/O request flows through the user space to the device.
Figure 4-1
The block I/O request flows through the user space to the device
The application issues a read/write request via either the file system or via memory mapped files. In either case, the request hits the page cache (kernel buffer for caching file data). With a file system-based call, the virtual file system (VFS) handles the system call and invokes the underlying registered file system.
The next layer is the block layer where the actual I/O request is constructed. There are three important data structures within the block layer:
Request_queue: A single queue architecture is where there is one request queue per device. This is the queue where the block layer, in tandem with the I/O scheduler, queues the request. The device driver drains the request queue and submits the request to the actual device.
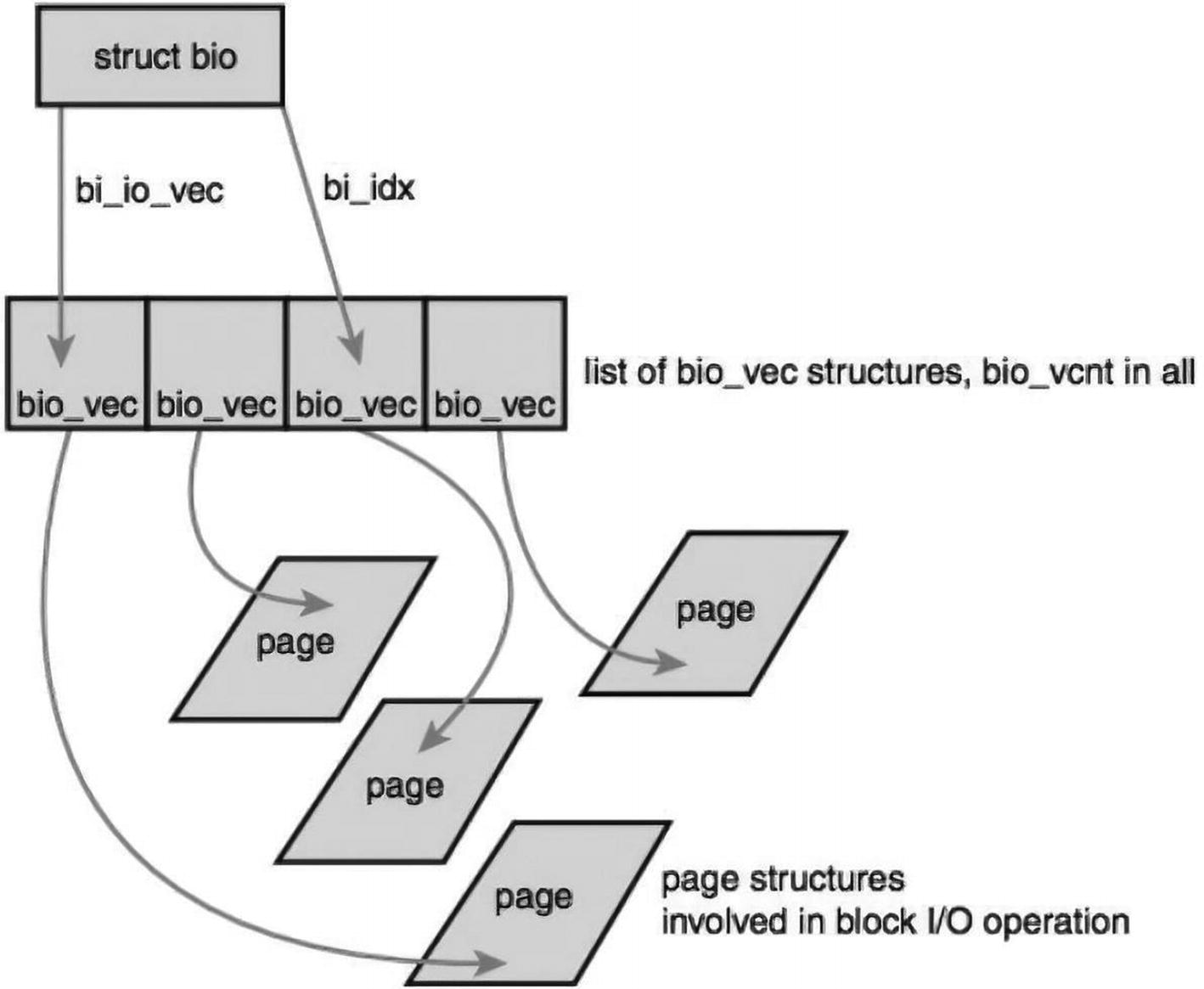
Request: The request represents the single I/O request to be delivered to the I/O device. The request is made of a list of bio structures.
Bio: The bio structure is the basic container for block I/O. Within the kernel is the bio structure. Defined in <linux/bio.h>, this structure represents block I/O operations that are in flight (active) as a list of segments. A segment is a chunk of a buffer that is contiguous in memory.
The bio structure represents block I/O operations that are in flight (active) as a list of segments
bio_vec represents a specific segment and has a pointer to the page holding the block data at a specific offset.
The requests are submitted to the request queue and drained by the device driver. The important data structures involved in implementing the block I/O cgroup within the Linux kernel are shown here:
struct blkcg {
struct cgroup_subsys_state css;
spinlock_t lock;
struct radix_tree_root blkg_tree;
struct blkcg_gq __rcu *blkg_hint;
struct hlist_head blkg_list;
struct blkcg_policy_data *cpd[BLKCG_MAX_POLS];
struct list_head all_blkcgs_node; #ifdef
CONFIG_CGROUP_WRITEBACK
struct list_head cgwb_list;
refcount_t cgwb_refcnt;
#endif
};
This structure represents the block I/O cgroup. Each block I/O cgroup is mapped to a request queue, which we explained previously.
/* association between a blk cgroup and a request queue */
struct blkcg_gq {
/* Pointer to the associated request_queue */
struct request_queue *q;
struct list_head q_node;
struct hlist_node blkcg_node;
struct blkcg *blkcg;
/*
* Each blkg gets congested separately and the congestion state is
* propagated to the matching bdi_writeback_congested.
*/
struct bdi_writeback_congested *wb_congested;
/* all non-root blkcg_gq's are guaranteed to have access to parent */
struct blkcg_gq *parent;
/* request allocation list for this blkcg-q pair */
struct request_list rl;
/* reference count */
atomic_t refcnt;
/* is this blkg online? protected by both blkcg and q locks */
Bool online;
struct blkg_rwstat stat_bytes;
struct blkg_rwstat stat_ios;
struct blkg_policy_data *pd[BLKCG_MAX_POLS];
struct rcu_head rcu_head;
atomic_t use_delay;
atomic64_t delay_nsec;
atomic64_t delay_start;
u64 last_delay;
int last_use;
};
Each request queue is associated with a block I/O cgroup.
Understanding Fairness
By fairness, we mean that each cgroup should get a fair share of the I/O issued to the device. To accomplish this, a CFQ (Complete Fair Queuing) scheduler must be configured. Without cgroups in place, the CFQ scheduler assigns each process a queue and then gives a time slice to each queue, thereby handling fairness.
A service tree is a list of active queues/process on which the scheduler runs. So basically, the CFQ scheduler services requests from the queues on the service tree.
With cgroup in place, the concept of a CFQ group is introduced. Now, instead of scheduling per process, the scheduling happens at the group level. This means each cgroup has multiple service trees on which the group queues are scheduled. Then there is a global service tree on which the CFQ groups are scheduled.
The CFQ group structure is defined as follows:
struct cfq_group {
/* must be the first member */
struct blkg_policy_data pd;
/* group service_tree member */
struct rb_node rb_node;
/* group service_tree key */
u64 vdisktime;
/*
* The number of active cfqgs and sum of their weights under this
* cfqg. This covers this cfqg's leaf_weight and all children's
* weights, but does not cover weights of further descendants.
*
* If a cfqg is on the service tree, it's active. An active cfqg
* also activates its parent and contributes to the children_weight
* of the parent.
*/
int nr_active;
unsigned int children_weight;
/*
* vfraction is the fraction of vdisktime that the tasks in this
* cfqg are entitled to. This is determined by compounding the
* ratios walking up from this cfqg to the root.
*
* It is in fixed point w/ CFQ_SERVICE_SHIFT and the sum of all
* vfractions on a service tree is approximately 1. The sum may
* deviate a bit due to rounding errors and fluctuations caused by
* cfqgs entering and leaving the service tree.
*/
* unsigned int vfraction;
/*
* There are two weights - (internal) weight is the weight of this
* cfqg against the sibling cfqgs. leaf_weight is the weight of
* this cfqg against the child cfqgs. For the root cfqg, both
* weights are kept in sync for backward compatibility.
*/
unsigned int weight;
unsigned int new_weight;
unsigned int dev_weight;
unsigned int leaf_weight;
unsigned int new_leaf_weight;
unsigned int dev_leaf_weight;
/* number of cfqq currently on this group */
int nr_cfqq;
/*
* Per group busy queues average. Useful for workload slice calc.
* We create the array for each prio class but at runtime it is used
* only for RT and BE class and slot for IDLE class remains unused.
* This is primarily done to avoid confusion and a gcc warning.
*/
unsigned int
busy_queues_avg[CFQ_PRIO_NR]; /*
*rr lists of queues with requests. We maintain service trees for
*RT and BE classes. These trees are subdivided in subclasses
* of SYNC, SYNC_NOIDLE and ASYNC based on workload type. For
* the IDLE class there is no subclassification and all the CFQ queues go on
* a single tree service_tree_idle.
* Counts are embedded in the cfq_rb_root
*/
struct cfq_rb_root service_trees[2][3];
struct cfq_rb_root service_tree_idle;
u64 saved_wl_slice;
enum wl_type_t saved_wl_type;
enum wl_class_t saved_wl_class;
/* number of requests that are on the dispatch list or inside driver */
int dispatched;
struct cfq_ttime ttime;
struct cfqg_stats stats; /* stats for this cfqg */
/* async queue for each priority case */ struct
cfq_queue *async_cfqq[2][IOPRIO_BE_NR]; struct
cfq_queue *async_idle_cfqq;
};
Each CFQ group contains an “io weight” value that can be configured in cgroup. The CFQG’s ( CFQ groups) vdisktime decides its position on the “cfqg service tree,” and then it’s charged according to the “io weight,”
Understanding Throttling
Throttling provides a means to apply resource limits to the block I/O. This enables the kernel to control the max block I/O that a user space process can get. The kernel realizes this via the block I/O cgroup.
* Currently the whole state machine of group depends on first bio
* queued in the group bio list. So one should not be calling
* this function with a different bio if there are other bios
* queued.
* /
BUG_ON(tg->service_queue.nr_queued[rw] &&
bio != throtl_peek_queued(&tg->service_queue.queued[rw]));
/* If tg->bps = -1, then BW is unlimited */
if (tg_bps_limit(tg, rw) == U64_MAX &&
tg_iops_limit(tg, rw) == UINT_MAX) {
if (wait)
*wait = 0;
return true;
}
/*
* If the previous slice expired, start a new one, otherwise
* renew/extend the existing slice to make sure it is at least throtl_slice interval
* long since now. The new slice is started only for empty throttle
* group. If there is queued bio, that means there should be an
* active slice and it should be extended instead.
* /
if (throtl_slice_used(tg, rw) &&
!(tg->service_queue.nr_queued[rw]))
throtl_start_new_slice(tg, rw);
else {
if (time_before(tg->slice_end[rw],
jiffies + tg->td->throtl_slice))
throtl_extend_slice(tg, rw,
jiffies + tg->td->throtl_slice);
}
if (tg_with_in_bps_limit(tg, bio, &bps_wait) &&
tg_with_in_iops_limit(tg, bio, &iops_wait)) {
if (wait)
*wait = 0;
return true;
}
max_wait = max(bps_wait, iops_wait);
if (wait)
*wait = max_wait;
if (time_before(tg->slice_end[rw], jiffies + max_wait))
throtl_extend_slice(tg, rw, jiffies + max_wait);
return false;
The snippet
if (tg_with_in_bps_limit(tg, bio, &bps_wait) &&
tg_with_in_iops_limit(tg, bio, &iops_wait)) {
if (wait)
*wait = 0;
return true;
}
This determines if the bio is within the limits for that cgroup or not. As evident, it checks both the bytes per sec limit as well as the I/O per sec limit for the cgroup.
If the limit is not exceeded, the bio is first charged to the cgroup:
/* within limits, let's charge and dispatch directly */ throtl_charge_bio(tg, bio);
static void throtl_charge_bio(struct throtl_grp *tg, struct bio *bio) {
bool rw = bio_data_dir(bio);
unsigned int bio_size =
throtl_bio_data_size (bio);
/* Charge the bio to the group */
tg->bytes_disp[rw] += bio_size;
tg->io_disp[rw]++;
tg->last_bytes_disp[rw] += bio_size;
tg->last_io_disp[rw]++;
/*
* BIO_THROTTLED is used to prevent the same bio to be throttled
* more than once as a throttled bio will go through blk-throtl the
* second time when it eventually gets issued. Set it when a bio
* is being charged to a tg.
*/
if (!bio_flagged(bio, BIO_THROTTLED))
bio_set_flag(bio, BIO_THROTTLED);
}
This function charges the bio (the bytes and iops) to the throttle group. It then passes the bio up to the parent, as evident in the following code:
/*
* @bio passed through this layer without being throttled.
* Climb up the ladder. If we’re already at the top, it
* can be executed directly.
*/
qn = &tg->qnode_on_parent[rw];
sq = sq->parent_sq;
tg = sq_to_tg(sq);
If the limits are exceeded, the code takes a different flow. The following code snippet is called:
throtl_add_bio_tg(bio, qn, tg);
throttled = true;
Let’s look at the throtl_add_bio_tg function in more detail:
/**
* throtl_add_bio_tg - add a bio to the specified throtl_grp
* @bio: bio to add
* @qn: qnode to use
* @tg: the target throtl_grp
*
Add @bio to @tg's service_queue using @qn. If @qn is not specified,
tg->qnode_on_self[] is used.
*/
static void throtl_add_bio_tg(struct bio *bio, struct
throtl_qnode *qn,
struct throtl_grp *tg)
{
struct throtl_service_queue *sq = &tg-
>service_queue; bool rw = bio_data_dir(bio);
if (!qn)
qn = &tg->qnode_on_self[rw];
/*
* If @tg doesn't currently have any bios queued in the same
* direction, queueing @bio can change when @tg should be
* dispatched. Mark that @tg was empty. This is automatically
* cleared on the next tg_update_disptime().
*/
if (!sq->nr_queued[rw])
tg->flags |= THROTL_TG_WAS_EMPTY;
throtl_qnode_add_bio(bio, qn, &sq->queued[rw]);
sq->nr_queued[rw]++;
throtl_enqueue_tg(tg);
}
This function adds the bio to the throttle service queue. This queue acts as a mechanism to throttle the bio requests. The service request is then drained later.
/**
*blk_throtl_drain - drain throttled bios
*@q: request_queue to drain throttled bios for
*Dispatch all currently throttled bios on @q through