
In the previous chapter, we discussed what virtualization is and covered the types of virtualization—VM-based and container-based. In VM-based virtualization, we briefly discussed the role and importance of the hypervisor, which facilitates the creation of virtual machines.
In this chapter, we do a deep dive into hypervisors. Most of the chapter explains virtualization using components like the Linux Kernel Virtual Machine (KVM) and the Quick Emulator (QEMU). Based on these components, we then look at how VMs are created and how data flow between the guest and the hosts is facilitated.
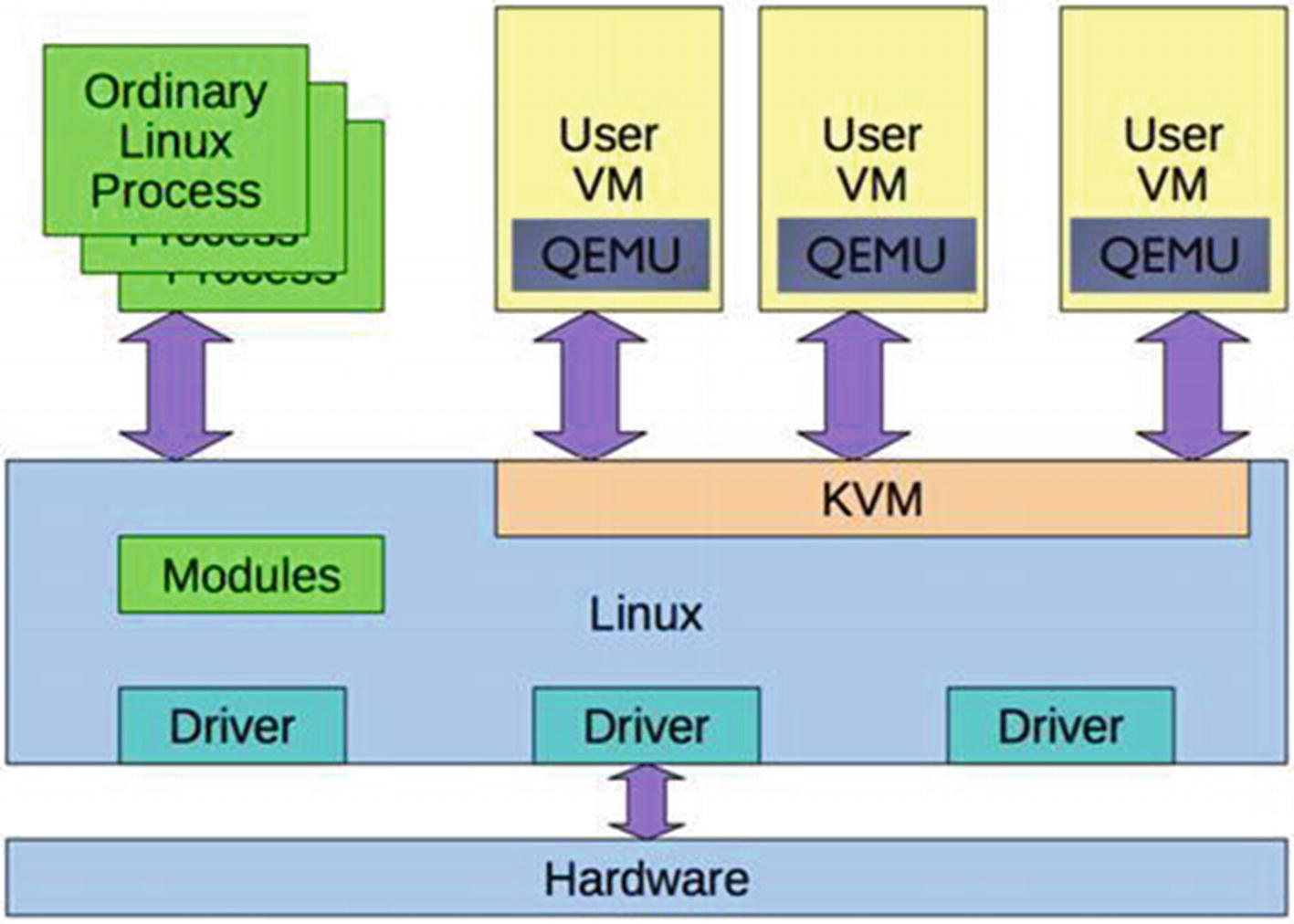
Linux provides hypervisor facilities by using the QEMU in the user space and a specialized kernel module called the KVM (the Linux Kernel Virtual Machine). The KVM uses the Intel vt-x extension instruction set to isolate resources at the hardware level. Since the QEMU is a user space process, the kernel treats it like other processes from a scheduling perspective.
Before we discuss the QEMU and KVM, let’s touch upon Intel’s vt-x and its specific instruction set.
The Intel Vt-x Instruction Set
Vt-x (for Intel x86 IA-32 and 64-bit architectures )
Vt-i (for the Itanium processor line)
Functionalities wise, they are similar. To understand the need for virtualization support at the CPU level, let’s quickly review how programs and the OS interact with the CPU, as well as how programs in VM interact with the CPU.
In the case of regular programs running on the host, the OS translates the program instructions into CPU instructions that are executed by the CPU.
In the case of a virtual machine, to run the programs within the virtual machine, the guest OS translates program instructions into virtual CPU instructions and the hypervisor then converts these into instructions for the physical CPU.
As we can see, for VM, the program instructions are translated twice—the program instructions are translated into virtual CPU instructions and the virtual CPU instructions are translated into physical CPU instructions.
This results in large performance overhead and slows down the virtual machine. CPU virtualization, like the vt-x feature, enables complete abstraction of the full prowess of the CPU to the virtual machine so that all the software in the VM can run without a performance hit; it runs as if it were on a dedicated CPU.
The vt-x also solves the problem whereby the x86 instructions architecture cannot be virtualized. According to the Popek Goldberg principle for virtualization (https://en.wikipedia.org/wiki/Popek_and_Goldberg_virtualization_requirements), all sensitive instructions must also be privileged. Privileged instructions cause a trap in user mode. In x86, some instructions are sensitive but not privileged. This means running them in the user space would not cause a trap. In effect, this means they are not virtualizable. An example of such an instruction is POPF.
Ring compression: Prior to the introduction of vt-x, the guest OS would run in Ring 1 and the guest OS apps would run in Ring 3. To execute the privileged instructions in the guest OS, we need higher privileges, which are by default not available to the guest (due to security reasons). Therefore, to execute those instructions, we need to trap into the hypervisor (which runs in Ring 0 with more privileges), which can then execute the privileged instruction on behalf of the guest. This is called ring compression or deprivileging. vt-x avoids this by running the guest OS directly in Ring 0.
Non-trapping instructions: Instructions like POPF on x86, which ideally should trap into the hypervisor as they are sensitive instructions, actually don’t trap. This is a problem as we need program control to shift to the hypervisor for all sensitive instructions. vt-x addresses this by running the guest OS in Ring 0, where instructions like POPF can trap into the hypervisor running in Ring -1.
Excessive trapping: Without vt-x, all sensitive and privileged instructions trap into the hypervisor in Ring 0. With vt-x this becomes configurable and depends on the VMM as to which instructions cause a trap and which can be safely handled in Ring 0. Details of this are beyond the scope of this book.
vt-x adds two more modes—the non-root mode (in Ring -1) is where VMM runs and the root mode (in Ring 0) is where the guest OS runs.
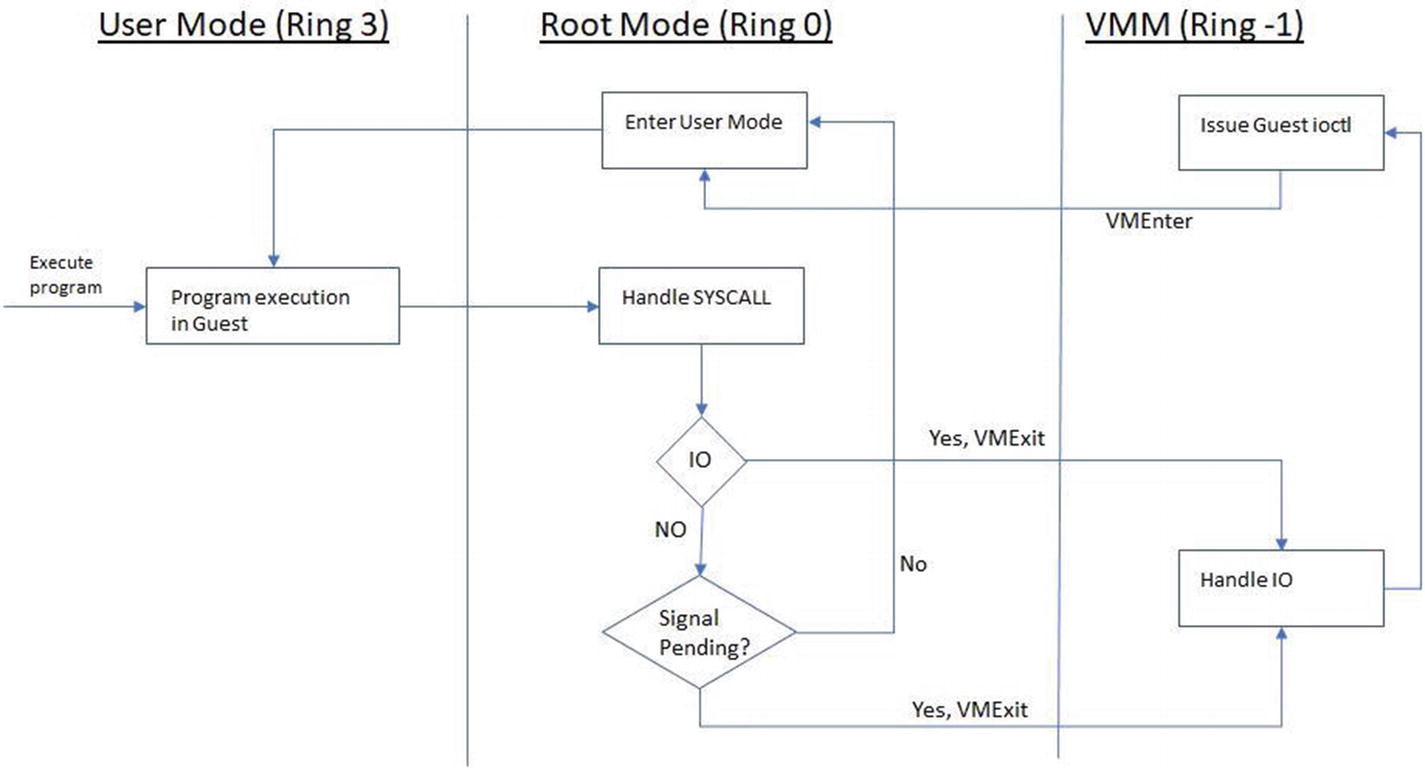
Program execution in the guest with an I/O call
NoteBefore we dive into the QEMU, as a side note, we want to bring your attention to some interesting projects in virtualization, like Dune, which runs a process within the VM environment rather than a complete OS. In root mode, it’s the VMM that runs. This is the mode where the KVM runs.
The Quick Emulator (QEMU)
The QEMU runs as a user process and handles the KVM kernel module. It uses the vt-x extensions to provide the guest with an isolated environment from a memory and CPU perspective. The QEMU process owns the guest RAM and is either memory mapped via a file or is anonymous. VCPUs are scheduled on the physical CPUs.
The main difference between a normal process and a QEMU process is the code executed on those threads. In the case of the guest, since it’s the virtualized machine, the code executes the software BIOS and the operating system.
QEMU interaction with the hypervisor
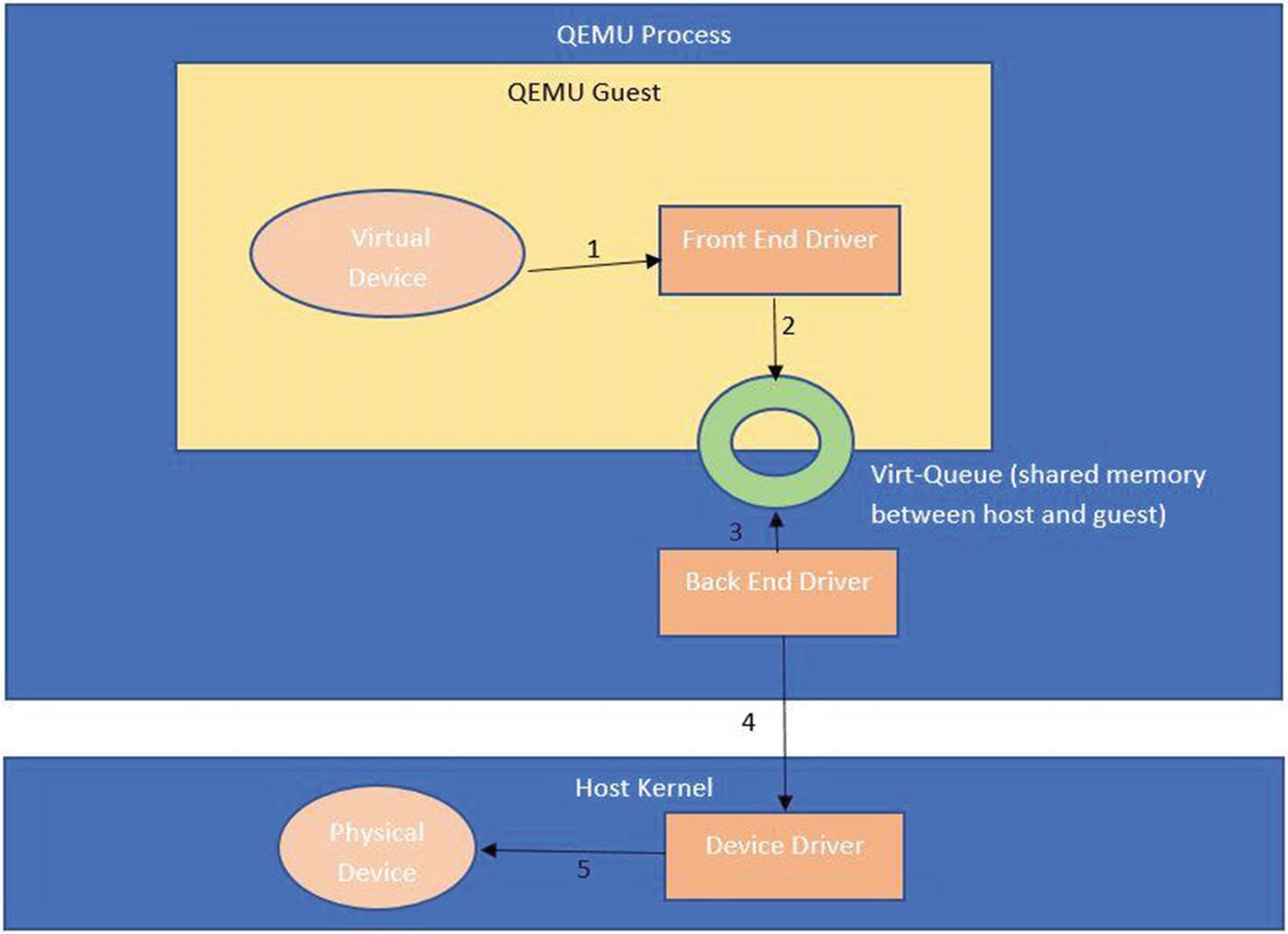
How a virtual device in the guest OS interacts with the physical device in the hypervisor layer. The guest has a frontend device driver, while the host has a backend device driver and these two together facilitate communication between the guest and host OS
The packet from the guest is received by the QEMU and then pushed to the backend driver on the host. One example is virtio-net.
The packet from the guest directly reaches the host via what is called a vhost driver. This bypasses the QEMU layer and is relatively faster.
Creating a VM Using the KVM Module
- 1.
KVM CREATE VM: This command creates a new VM that has no virtual CPUs and no memory.
- 2.
KVM SET USER MEMORY REGION: This command maps the user space memory for the VM.
- 3.
KVM CREATE IRQCHIP / KVM CREATE VCPU: This command creates a hardware component like a virtual CPU and maps them with vt-x functionalities.
- 4.
KVM SET REGS / SREGS / KVM SET FPU / KVM SET CPUID / KVM SET MSRS / KVM SET VCPU EVENTS / KVM SET LAPIC: These commands are hardware configurations.
- 5.
KVM RUN: This command starts the VM.
KVM RUN starts the VM and internally it’s the VMLaunch instruction invoked by the KVM kernel module that puts the VM code execution into non-root mode. It then changes the instruction pointer to the code location in the guest’s memory. This is a slight over-simplification, as the module does much more to set up the VM, including setting up the VMCS (VM Control Section), and so on.
Vhost Based Data Communication
When the device is initialized, a kernel thread is created for the specific QEMU process. This thread handles the I/O for the specific guest. The thread listens to events on the host side, on the virtqueues. When an event arrives to drain the data (in virtio terminology, it’s called a kick), the I/O thread drains the packet from the tx (transmission) queue of the guest. The thread then transmits this data to the tap device, which it makes it available to the underlying bridge/switch in order to transmit it downstream to an overlay or routing mechanism.
The KVM kernel module registers the eventfd for the guest. This a file descriptor that’s registered for the guest (by the QEMU) with the KVM kernel module. The FD is registered against a guest I/O exit event (a kick), which drains the data.
What Is an eventfd?
So what basically is an eventfd? It’s an interprocess communication (IPC) mechanism that offers a wait-notify facility between user space programs or between the kernel and the user space. The idea is simple. In the same way that we have FDs for files, we can create file descriptors for events. The benefit here is that the FDs can then be treated like other FDs and can be registered with mechanisms like poll, select, and epoll. The mechanisms can then facilitate a notification system when those FDs are written to.
The consumer thread can be made to wait on an epoll object via epoll_wait . Once the producer thread writes to the FD, the epoll mechanism will notify the consumer (again depending on the edge or level triggers) of the event.
Edge-triggered means that you only get notified when the event is detected (which takes place, say in an instant), while level-triggered means you get notified when the event is present (which will be true over a period of time).
For example, in an edge-triggered system, if you want a notification to signal you when data is available to read, you’ll only get that notification when data was not available to read before, but now is. If you read some of the available data (so that some of the data is still available to read), you will not get another notification. If you read all of the available data, you will get another notification when new data becomes available to read again. In a level-triggered system, you’d get that notification whenever data is available to read.
The host uses an eventfd by using ioeventfd to send data from the guest to the host and irqfd to receive an interrupt from the host to the guest.
- 1.
Create the eventfd.
- 2.
Write the OOM event to the eventfd.
The process thread will block until the event is generated. Once the event is generated, the thread is woken up to react to the OOM notification.
The difference between eventfd and a Linux pipe is that the pipe needs two file descriptors, whereas eventfd just needs one.
The vhost I/O thread watches for the eventfd. Whenever the I/O event happens from the guest, the I/O thread for the guest gets informed that it has to drain the buffers from the tx queue.
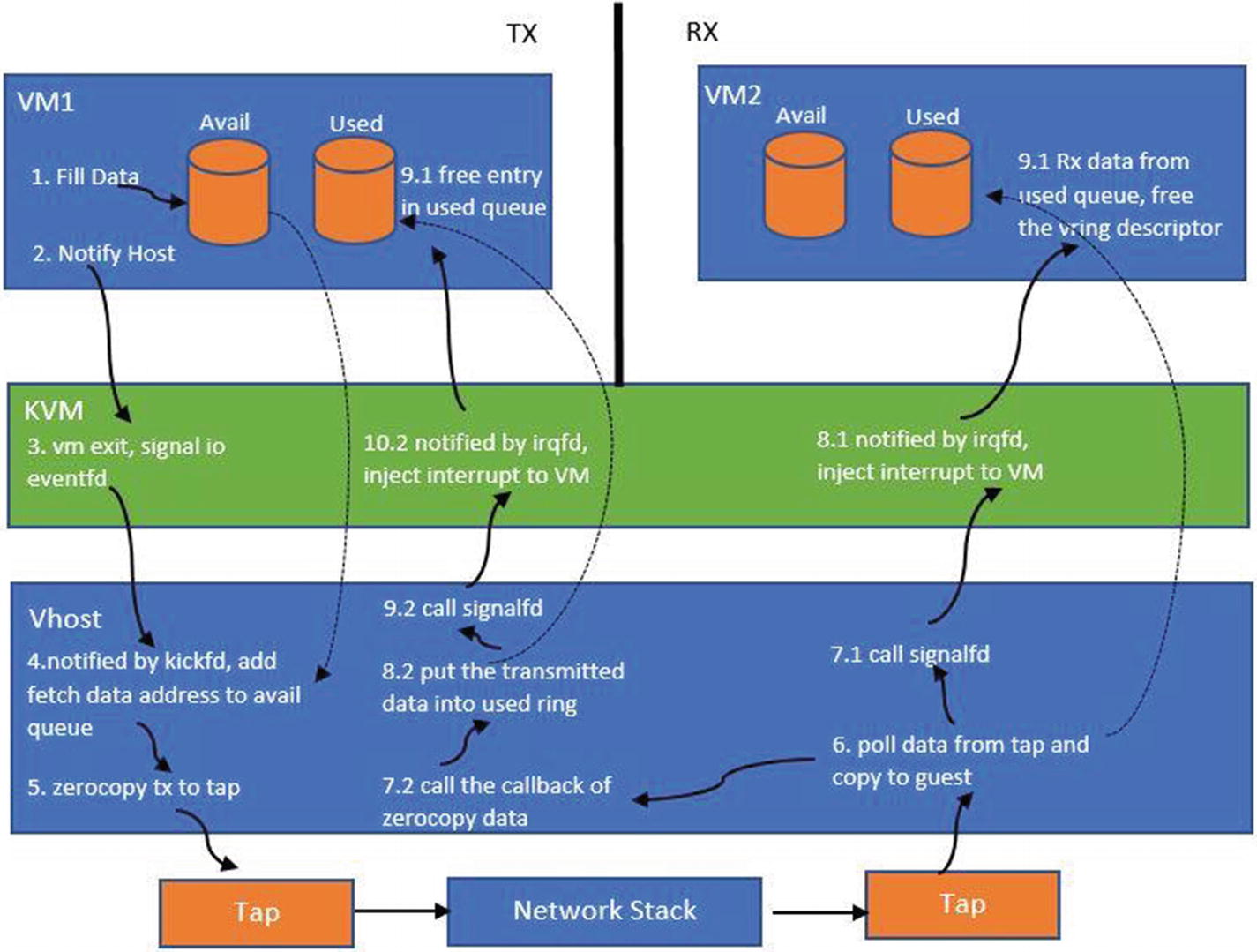
Network packet flow
Alternative Virtualization Mechanisms
Reduce the interfaces exposed by different software layers like VMM in order to reduce attack vectors. The attack vectors can come in the form of exploits, like memory exploits that install malicious software or control the system by elevating privileges.
Use hardware isolation to isolate the different containers/processes we run.
In summary, can we get the isolation levels of VMs with a reduced or minimalistic exposed machine interface and with a provisioning speed similar to that of containers.
We have already discussed how VMs, with the help of the VMM, isolate these workloads. The VMM exposes the machine model (x86 interface), whereas the container is exposing the POSIX interface. The VMM, with hardware virtualization, can isolate CPU, memory, and I/O (vt-d, SRIOV, and IOMMU). Containers that share the kernel provide this feature via namespaces and cgroups, but are still considered a weaker alternative to the hardware-based isolation techniques.
So is there a way to get the two worlds closer? One of the goals would be to reduce the attack vector by employing a minimalistic interface approach. What this means is that, instead of exposing complete POSIX to apps or a complete machine interface to the guest OS, we only provide what the app/OS needs. This is where we started to see the evolution of how the unikernel and the library OS started to happen.
Unikernels
Unikernels provide the mechanism, via toolchains, for preparing a minimalistic OS. This means if the application only needs network APIs, then the keyboard, mouse devices, and their drivers are not packaged. This reduces the attack vector considerably.
One of the problems with unikernels was that they had to be built across different models of device drivers. With the advent of I/O virtualization and virtio drivers, this problem is somewhat resolved, as the unikernels can now be built with exact virtio devices and the drivers needed for the apps on the guest. This means the guest can be a unikernel (Library OS) sitting on top of, say, a hypervisor like KVM. This still has limitations, as the QEMU or the user space part still has a good amount of codebase, all of which are subject to exploits.
To achieve further minimalism, one proposal was to package the VMM alongside the unikernel. What this means is that VMM now plays the role of the QEMU for the unikernel, but per instance. The VMM code is limited to the needed functionality and facilitates memory-based communication between the guest and the VMM. With this model, multiple VMMs can be made to sit on the hypervisor. The VMM role facilitates I/O and creates the guest unikernel using the hardware isolation capabilities.

The unikernel is a single process with no multi-threading capabilities
In Figure 2-5, we can observe that the image on the left is running a VMM and the QEMU combined, to run unikernels on top, whereas the image on the right shows a VMM (monitor) like UKVM packaged alongside the unikernel . So basically we have reduced the code (the QEMU) and thereby have eliminated a significant attack vector. This is in line with the minimalistic interfaces approach we talked about previously.
Project Dune
- 1.
Running the trusted code of the process in Ring 0. This is basically the library that Dune calls libdune.
- 2.
Running the untrusted code in Ring 3.

The Dune architecture
To bootstrap the process, Dune creates an operating environment, which entails setting up the page tables (the CR3 register is pointing to the root). It also sets up the IDT for the hardware exceptions. The trusted and untrusted code runs in the same address space, wherein the memory pages of the trusted code are protected by supervisor bits in page table entries. The system calls trap into the same process and are interposed with hypercalls to the VMM. For more details on Dune, check out http://dune.scs.stanford.edu/.
novm
novm is another type of hardware container used by the project. (It also uses the KVM APIs to create the VM via using the /dev/kvm device file.) Instead of presenting a disk interface to the VM, novm presents a file system (9p) interface back to the VM. This allows packaging of software that we want to provision as a container. There is no BIOS and the VMM simply puts the VM in 32-bit protected mode directly. This makes the provisioning process faster, because steps like device probing are not needed.
Summary of Alternate Virtualization Approaches
In summary, this chapter covered three approaches—one approach packaged a unikernel with a minimal OS interface, the second approach got rid of the OS interface and ran a process within Ring 0 directly, and the third approach provided a file system into the VM instead of block devices directly and optimized booting aspects.
These approaches provide good isolation at the hardware level and very fast spin-up times and might be a good fit for running serverless workloads and other cloud workloads.
Code flow isolation via control flow integrity
Memory isolation
Capability-based security
We could then use these primitives to build sandboxes within each process itself. This way, we can get even faster boot times for the code we want to execute.
WebAssembly is leading the innovation in this space. The basic idea is to run WebAssembly, aka Wasm modules, within the same process (the WASM runtime). Each module is isolated from the other modules, so we get one sandbox per tenant. This fits well into the serverless computer paradigms and probably prevents problems like cold start.
On a side note, there is a new functionality called hotplug capability that makes the devices dynamically available in the guest. They allow developers to dynamically resize the block devices as an example without restarting the guest. There is also the hotplug-dimm module, which allows developers to resize the RAM available to the guest.