
The discrete Fourier transform (DFT) is one of the two most common, and powerful, procedures encountered in the field of digital signal processing. (Digital filtering is the other.) The DFT enables us to analyze, manipulate, and synthesize signals in ways not possible with continuous (analog) signal processing. Even though it's now used in almost every field of engineering, we'll see applications for DFT continue to flourish as its utility becomes more widely understood. Because of this, a solid understanding of the DFT is mandatory for anyone working in the field of digital signal processing.
The DFT is a mathematical procedure used to determine the harmonic, or frequency, content of a discrete signal sequence. Although, for our purposes, a discrete signal sequence is a set of values obtained by periodic sampling of a continuous signal in the time domain, we'll find that the DFT is useful in analyzing any discrete sequence regardless of what that sequence actually represents. The DFT's origin, of course, is the continuous Fourier transform X(f) defined as

where x(t) is some continuous time-domain signal.[†]
In the field of continuous signal processing, Eq. (3-1) is used to transform an expression of a continuous time-domain function x(t) into a continuous frequency-domain function X(f). Subsequent evaluation of the X(f) expression enables us to determine the frequency content of any practical signal of interest and opens up a wide array of signal analysis and processing possibilities in the fields of engineering and physics. One could argue that the Fourier transform is the most dominant and widespread mathematical mechanism available for the analysis of physical systems. (A prominent quote from Lord Kelvin better states this sentiment: “Fourier's theorem is not only one of the most beautiful results of modern analysis, but it may be said to furnish an indispensable instrument in the treatment of nearly every recondite question in modern physics.” By the way, the history of Fourier's original work in harmonic analysis, relating to the problem of heat conduction, is fascinating. References [1] and [2] are good places to start for those interested in the subject.)
With the advent of the digital computer, the efforts of early digital processing pioneers led to the development of the DFT defined as the discrete frequency-domain sequence X(m), where

For our discussion of Eq. (3-2), x(n) is a discrete sequence of time-domain sampled values of the continuous variable x(t). The “e” in Eq. (3-2) is, of course, the base of natural logarithms and j = ![]() .
.
Equation (3-2) has a tangled, almost unfriendly, look about it. Not to worry. After studying this chapter, Eq. (3-2) will become one of our most familiar and powerful tools in understanding digital signal processing. Let's get started by expressing Eq. (3-2) in a different way and examining it carefully. From Euler's relationship e–jø = cos(ø) –jsin(ø), Eq. (3-2) is equivalent to

We have separated the complex exponential of Eq. (3-2) into its real and imaginary components where
X(m) | = | the mth DFT output component, i.e., X(0), X(1), X(2), X(3), etc., |
m | = | the index of the DFT output in the frequency domain, |
m | = | 0, 1, 2, 3, . . ., N–1, |
x(n) | = | the sequence of input samples, x(0), x(1), x(2), x(3), etc., |
|
n | = | the time-domain index of the input samples, n = 0, 1, 2, 3, . . ., N–1, |
j | = |
|
N | = | the number of samples of the input sequence and the number of frequency points in the DFT output. |
Although it looks more complicated than Eq. (3-2), Eq. (3-3) turns out to be easier to understand. (If you're not too comfortable with it, don't let the j = ![]() concept bother you too much. It's merely a convenient abstraction that helps us compare the phase relationship between various sinusoidal components of a signal. Chapter 8 discusses the j operator in some detail.)[1] The indices for the input samples (n) and the DFT output samples (m) always go from 0 to N–1 in the standard DFT notation. This means that with N input time-domain sample values, the DFT determines the spectral content of the input at N equally spaced frequency points. The value N is an important parameter because it determines how many input samples are needed, the resolution of the frequency-domain results, and the amount of processing time necessary to calculate an N-point DFT.
concept bother you too much. It's merely a convenient abstraction that helps us compare the phase relationship between various sinusoidal components of a signal. Chapter 8 discusses the j operator in some detail.)[1] The indices for the input samples (n) and the DFT output samples (m) always go from 0 to N–1 in the standard DFT notation. This means that with N input time-domain sample values, the DFT determines the spectral content of the input at N equally spaced frequency points. The value N is an important parameter because it determines how many input samples are needed, the resolution of the frequency-domain results, and the amount of processing time necessary to calculate an N-point DFT.
It's useful to see the structure of Eq. (3-3) by eliminating the summation and writing out all the terms. For example, when N = 4, n and m both go from 0 to 3, and Eq. (3-3) becomes

Writing out all the terms for the first DFT output term corresponding to m = 0,

For the second DFT output term corresponding to m = 1, Eq. (3-4a) becomes

For the third output term corresponding to m = 2, Eq. (3-4a) becomes

Finally, for the fourth and last output term corresponding to m = 3, Eq. (3-4a) becomes

The above multiplication symbol “·“ in Eq. (3-4) is used merely to separate the factors in the sine and cosine terms. The pattern in Eq. (3-4b) through (3-4e) is apparent now, and we can certainly see why it's convenient to use the summation sign in Eq. (3-3). Each X(m) DFT output term is the sum of the point for point product between an input sequence of signal values and a complex sinusoid of the form cos(ø) – jsin(ø). The exact frequencies of the different sinusoids depend on both the sampling rate fs, at which the original signal was sampled, and the number of samples N. For example, if we are sampling a continuous signal at a rate of 500 samples/s and, then, perform a 16-point DFT on the sampled data, the fundamental frequency of the sinusoids is fs/N = 500/16 or 31.25 Hz. The other X(m) analysis frequencies are integral multiples of the fundamental frequency, i.e.,
X(0) | = | 1st frequency term, with analysis frequency = 0 · 31.25 = 0 Hz, |
X(1) | = | 2nd frequency term, with analysis frequency = 1 · 31.25 = 31.25 Hz, |
X(2) | = | 3rd frequency term, with analysis frequency = 2 · 31.25 = 62.5 Hz, |
X(3) | = | 4th frequency term, with analysis frequency = 3 · 31.25 = 93.75 Hz, |
. . . | ||
. . . | ||
X(15) | = | 16th frequency term, with analysis frequency = 15 · 31.25 = 468.75 Hz. |
The N separate DFT analysis frequencies are
So, in this example, the X(0) DFT term tells us the magnitude of any 0-Hz (“DC”) component contained in the input signal, the X(1) term specifies the magnitude of any 31.25-Hz component in the input signal, and the X(2) term indicates the magnitude of any 62.5-Hz component in the input signal, etc. Moreover, as we'll soon show by example, the DFT output terms also determine the phase relationship between the various analysis frequencies contained in an input signal.
Quite often we're interested in both the magnitude and the power (magnitude squared) contained in each X(m) term, and the standard definitions for right triangles apply here as depicted in Figure 3-1.
If we represent an arbitrary DFT output value, X(m), by its real and imaginary parts
the magnitude of X(m) is
By definition, the phase angle of X(m), Xø(m), is

The power of X(m), referred to as the power spectrum, is the magnitude squared where
The above Eqs. (3-2) and (3-3) will become more meaningful by way of an example, so, let's go through a simple one step-by-step. Let's say we want to sample and perform an 8-point DFT on a continuous input signal containing components at 1 kHz and 2 kHz, expressed as
To make our example input signal xin(t) a little more interesting, we have the 2-kHz term shifted in phase by 135° (3π/4 radians) relative to the 1-kHz sinewave. With a sample rate of fs, we sample the input every 1/fs = ts seconds. Because N = 8, we need 8 input sample values on which to perform the DFT. So the 8-element sequence x(n) is equal to xin(t) sampled at the nts instants in time so that
If we choose to sample xin(t) at a rate of fs = 8000 samples/s from Eq. (3-5), our DFT results will indicate what signal amplitude exists in x(n) at the analysis frequencies of mfs/N, or 0 kHz, 1 kHz, 2 kHz, . . ., 7 kHz. With fs = 8000 samples/s, our eight x(n) samples are

These x(n) sample values are the dots plotted on the solid continuous xin(t) curve in Figure 3-2(a). (Note that the sum of the sinusoidal terms in Eq. (3-10), shown as the dashed curves in Figure 3-2(a), is equal to xin(t).)
Figure 3-2. DFT Example 1: (a) the input signal; (b) the input signal and the m = 1 sinusoids; (c) the input signal and the m = 2 sinusoids; (d) the input signal and the m = 3 sinusoids.
Now we're ready to apply Eq. (3-3) to determine the DFT of our x(n) input. We'll start with m = 1 because the m = 0 case leads to a special result that we'll discuss shortly. So, for m = 1, or the 1-kHz (mfs/N = 1·8000/8) DFT frequency term, Eq. (3-3) for this example becomes

Next we multiply x(n) by successive points on the cosine and sine curves of the first analysis frequency that have a single cycle over our 8 input samples. In our example, for m = 1, we'll sum the products of the x(n) sequence with a 1-kHz cosine wave and a 1-kHz sinewave evaluated at the angular values of 2πn/8. Those analysis sinusoids are shown as the dashed curves in Figure 3-2(b). Notice how the cosine and sinewaves have m = 1 complete cycles in our sample interval.
Substituting our x(n) sample values into Eq. (3-12) and listing the cosine terms in the left column and the sine terms in the right column, we have
X(1) | = 0.3535 · 1.0 | – j(0.3535 · 0.0) | ← this is the n = 0 term | ||
+ 0.3535 · 0.707 | – j(0.3535 · 0.707) | ← this is the n = 1 term | |||
+ 0.6464 · 0.0 | – j(0.6464 · 1.0) | ← this is the n = 2 term | |||
+ 1.0607 · –0.707 | – j(1.0607 · 0.707) | . . . | |||
+ 0.3535 · –1.0 | – j(0.3535 · 0.0) | . . . | |||
– 1.0607 · –0.707 | – j(–1.0607 · –0.707) | . . . | |||
– 1.3535 · 0.0 | – j(–1.3535 · –1.0) | . . . | |||
– 0.3535 · 0.707 | – j(–0.3535 · –0.707) | ← this is the n = 7 term | |||
= | 0.3535 | + j0.0 | |||
+ 0.250 | – j0.250 | ||||
+ 0.0 | – j0.6464 | ||||
– 0.750 | – j0.750 | ||||
– 0.3535 | – j0.0 | ||||
+ 0.750 | – j0.750 | ||||
+ 0.0 | – j1.3535 | ||||
– 0.250 | – j0.250 | ||||
= | 0.0 – j4.0 = 4 ∠ –90°. | ||||
So we now see that the input x(n) contains a signal component at a frequency of 1 kHz. Using Eq. (3-7), Eq. (3-8), and Eq. (3-9) for our X(1) result, Xmag(1) = 4, XPS(1) = 16, and X(1)'s phase angle relative to a 1-kHz cosine is Xø(1) = –90°.
For the m = 2 frequency term, we correlate x(n) with a 2-kHz cosine wave and a 2-kHz sinewave. These waves are the dashed curves in Figure 3-2(c). Notice here that the cosine and sinewaves have m = 2 complete cycles in our sample interval in Figure 3-2(c). Substituting our x(n) sample values in Eq. (3-3), for m = 2, gives
X(2) | = 0.3535 · 1.0 | – j(0.3535 · 0.0) | |||
+ 0.3535 · 0.0 | – j(0.3535 · 1.0) | ||||
+ 0.6464 · –1.0 | – j(0.6464 · 0.0) | ||||
+ 1.0607 · 0.0 | – j(1.0607 · –1.0) | ||||
+ 0.3535 · 1.0 | – j(0.3535 · 0.0) | ||||
–1.0607 · 0.0 | – j(–1.0607 · 1.0) | ||||
–1.3535 · –1.0 | – j(–1.3535 · 0.0) | ||||
–0.3535 · 0.0 | – j(–0.3535 · –1.0) | ||||
= | 0.3535 | + j0.0 | |||
+ 0.0 | – j0.3535 | ||||
– 0.6464 | – j0.0 | ||||
– 0.0 | + j1.0607 | ||||
+ 0.3535 | – j0.0 | ||||
+ 0.0 | + j1.0607 | ||||
+ 1.3535 | – j0.0 | ||||
– 0.0 | – j0.3535 | ||||
= | 1.414 + j1.414 = 2 ∠ 45°. | ||||
Here our input x(n) contains a signal at a frequency of 2 kHz whose relative amplitude is 2, and whose phase angle relative to a 2-kHz cosine is 45°. For the m = 3 frequency term, we correlate x(n) with a 3-kHz cosine wave and a 3-kHz sinewave. These waves are the dashed curves in Figure 3-2(d). Again, see how the cosine and sinewaves have m = 3 complete cycles in our sample interval in Figure 3-2(d). Substituting our x(n) sample values in Eq. (3-3) for m = 3 gives
X(3) | = 0.3535 · 1.0 | – j(0.3535 · 0.0) | ||
+ 0.3535 · –0.707 | – j(0.3535 · 0.707) | |||
+ 0.6464 · 0.0 | – j(0.6464 · –1.0) | |||
+ 1.0607 · 0.707 | – j(1.0607 · 0.707) | |||
+ 0.3535 · –1.0 | – j(0.3535 · 0.0) | |||
– 1.0607 · 0.707 | – j(–1.0607 · –0.707) | |||
– 1.3535 · 0.0 | – j(–1.3535 · 1.0) | |||
– 0.3535 · –0.707 | – j(–0.3535 · –0.707) | |||
= | 0.3535 | + j0.0 | ||
– 0.250 | – j0.250 | |||
+ 0.0 | + j0.6464 | |||
+ 0.750 | – j0.750 | |||
– 0.3535 | – j0.0 | |||
– 0.750 | – j0.750 | |||
+ 0.0 | + j1.3535 | |||
+ 0.250 | – j0.250 | |||
= | 0.0 – j0.0 = 0 ∠ 0°. | |||
Our DFT indicates that x(n) contained no signal at a frequency of 3 kHz. Let's continue our DFT for the m = 4 frequency term using the sinusoids in Figure 3-3(a).
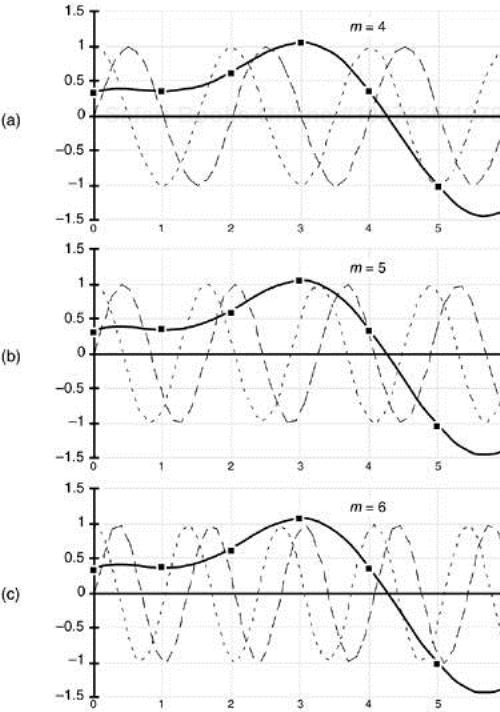
Figure 3-3. DFT Example 1: (a) the input signal and the m = 4 sinusoids; (b) the input and the m = 5 sinusoids; (c) the input and the m = 6 sinusoids; (d) the input and the m = 7 sinusoids.
So Eq. (3-3) is
X(4) | = 0.3535 · 1.0 | – j(0.3535 · 0.0) | ||
+ 0.3535 · –1.0 | – j(0.3535 · 0.0) | |||
+ 0.6464 · 1.0 | – j(0.6464 · 0.0) | |||
+ 1.0607 · –1.0 | – j(1.0607 · 0.0) | |||
+ 0.3535 · 1.0 | – j(0.3535 · 0.0) | |||
– 1.0607 · –1.0 | – j(–1.0607 · 0.0) | |||
– 1.3535 · 1.0 | – j(–1.3535 · 0.0) | |||
– 0.3535 · –1.0 | – j(–0.3535 · 0.0) | |||
= | 0.3535 | – j0.0 | ||
– 0.3535 | – j0.0 | |||
+ 0.6464 | – j0.0 | |||
– 1.0607 | – j0.0 | |||
+ 0.3535 | – j0.0 | |||
+ 1.0607 | – j0.0 | |||
– 1.3535 | – j0.0 | |||
+ 0.3535 | – j0.0 | |||
= | 0.0 – j0.0 = 0 ∠ 0°. | |||
Our DFT for the m = 5 frequency term using the sinusoids in Figure 3-3(b) yields
X(5) | = 0.3535 · 1.0 | – j(0.3535 · 0.0) | ||
+ 0.3535 · –0.707 | – j(0.3535 · –0.707) | |||
+ 0.6464 · 0.0 | – j(0.6464 · 1.0) | |||
+ 1.0607 · 0.707 | – j(1.0607 · –0.707) | |||
+ 0.3535 · –1.0 | – j(0.3535 · 0.0) | |||
– 1.0607 · 0.707 | – j(–1.0607 · 0.707) | |||
– 1.3535 · 0.0 | – j(–1.3535 · –1.0) | |||
– 0.3535 · –0.707 | – j(–0.3535 · 0.707) | |||
= | 0.3535 | – j0.0 | ||
– 0.250 | + j0.250 | |||
+ 0.0 | – j0.6464 | |||
+ 0.750 | + j0.750 | |||
– 0.3535 | – j0.0 | |||
– 0.750 | + j0.750 | |||
+ 0.0 | – j1.3535 | |||
+ 0.250 | + j0.250 | |||
= | 0.0 – j.0 = 0 ∠ 0°. | |||
For the m = 6 frequency term using the sinusoids in Figure 3-3(c), Eq. (3-3) is
X(6) | = 0.3535 · 1.0 | – j(0.3535 · 0.0) | ||
+ 0.3535 · 0.0 | – j(0.3535 · –1.0) | |||
+ 0.6464 · –1.0 | – j(0.6464 · 0.0) | |||
+ 1.0607 · 0.0 | – j(1.0607 · 1.0) | |||
+ 0.3535 · 1.0 | – j(0.3535 · 0.0) | |||
– 1.0607 · 0.0 | – j(–1.0607 · –1.0) | |||
– 1.3535 · –1.0 | – j(–1.3535 · 0.0) | |||
– 0.3535 · 0.0 | – j(–0.3535 · 1.0) | |||
= | 0.3535 | – j0.0 | ||
+ 0.0 | + j0.3535 | |||
– 0.6464 | – j0.0 | |||
+ 0.0 | – j1.0607 | |||
+ 0.3535 | – j0.0 | |||
+ 0.0 | – j1.0607 | |||
+ 1.3535 | – j0.0 | |||
+ 0.0 | + j0.3535 | |||
= | 1.414 – j1.414 = 2 ∠ –45°. | |||
For the m = 7 frequency term using the sinusoids in Figure 3-3(d), Eq. (3-3) is
X(7) | = 0.3535 · 1.0 | – j(0.3535 · 0.0) | ||
+ 0.3535 · 0.707 | – j(0.3535 · –0.707) | |||
+ 0.6464 · 0.0 | – j(0.6464 · –1.0) | |||
+ 1.0607 · –0.707 | – j(1.0607 · –0.707) | |||
+ 0.3535 · –1.0 | – j(0.3535 · 0.0) | |||
– 1.0607 · –0.707 | – j(–1.0607 · 0.707) | |||
– 1.3535 · 0.0 | – j(–1.3535 · 1.0) | |||
– 0.3535 · 0.707 | – j(–0.3535 · 0.707) | |||
= | 0.3535 | + j0.0 | ||
+ 0.250 | + j0.250 | |||
+ 0.0 | + j0.6464 | |||
– 0.750 | + j0.750 | |||
– 0.3535 | – j0.0 | |||
+ 0.750 | + j0.750 | |||
+ 0.0 | + j1.3535 | |||
– 0.250 | + j0.250 | |||
= | 0.0 + j4.0 = 4 ∠ 90°. | |||
If we plot the X(m) output magnitudes as a function of frequency, we get the magnitude spectrum of the x(n) input sequence, shown in Figure 3-4(a). The phase angles of the X(m) output terms are depicted in Figure 3-4(b).
Figure 3-4. DFT results from Example 1: (a) magnitude of X(m); (b) phase of X(m); (c) real part of X(m); (d) imaginary part of X(m).
Hang in there, we're almost finished with our example. We've saved the calculation of the m = 0 frequency term to the end because it has a special significance. When m = 0, we correlate x(n) with cos(0) – jsin(0) so that Eq. (3-3) becomes

Because cos(0) = 1, and sin(0) = 0,

We can see that Eq. (3-13') is the sum of the x(n) samples. This sum is, of course, proportional to the average of x(n). (Specifically, X(0) is equal to N times x(n)'s average value). This makes sense because the X(0) frequency term is the nontime-varying (DC) component of x(n). If X(0) were nonzero, this would tell us that the x(n) sequence is riding on a DC bias and has some nonzero average value. For our specific example input from Eq. (3-10), the sum, however, is zero. The input sequence has no DC component, so we know that X(0) will be zero. But let's not be lazy—we'll calculate X(0) anyway just to be sure. Evaluating Eq. (3-3) or Eq. (3-13') for m = 0, we see that
X(0) | = 0.3535 · 1.0 | – j(0.3535 · 0.0) | ||
+ 0.3535 · 1.0 | – j(0.3535 · 0.0) | |||
+ 0.6464 · 1.0 | – j(0.6464 · 0.0) | |||
+ 1.0607 · 1.0 | – j(1.0607 · 0.0) | |||
+ 0.3535 · 1.0 | – j(0.3535 · 0.0) | |||
– 1.0607 · 1.0 | – j(–1.0607 · 0.0) | |||
– 1.3535 · 1.0 | – j(–1.3535 · 0.0) | |||
– 0.3535 · 1.0 | – j(–0.3535 · 0.0) | |||
X(0) | = 0.3535 | – j0.0 | ||
+ 0.3535 | – j0.0 | |||
+ 0.6464 | – j0.0 | |||
+ 1.0607 | – j0.0 | |||
+ 0.3535 | – j0.0 | |||
– 1.0607 | – j0.0 | |||
– 1.3535 | – j0.0 | |||
– 0.3535 | – j0.0 | |||
= 0.0 – j0.0 = 0 ∠ 0°. | ||||
So our x(n) had no DC component, and, thus, its average value is zero. Notice that Figure 3-4 indicates that xin(t), from Eq. (3-10), has signal components at 1 kHz (m = 1) and 2 kHz (m = 2). Moreover, the 1-kHz tone has a magnitude twice that of the 2-kHz tone. The DFT results depicted in Figure 3-4 tell us exactly the spectral content of the signal defined by Eqs. (3-10) and (3-11).
The perceptive reader should be asking two questions at this point. First, what do those nonzero magnitude values at m = 6 and m = 7 in Figure 3-4(a) mean? Also, why do the magnitudes seem four times larger than we would expect? We'll answer those good questions shortly. The above 8-point DFT example, although admittedly simple, illustrates two very important characteristics of the DFT that we should never forget. First, any individual X(m) output value is nothing more than the sum of the term-by-term products, a correlation, of an input signal sample sequence with a cosine and a sinewave whose frequencies are m complete cycles in the total sample interval of N samples. This is true no matter what the fs sample rate is and no matter how large N is in an N-point DFT. The second important characteristic of the DFT of real input samples is the symmetry of the DFT output terms.
Looking at Figure 3-4(a) again, there is an obvious symmetry in the DFT results. Although the standard DFT is designed to accept complex input sequences, most physical DFT inputs (such as digitized values of some continuous signal) are referred to as real, that is, real inputs have nonzero real sample values, and the imaginary sample values are assumed to be zero. When the input sequence x(n) is real, as it will be for all of our examples, the complex DFT outputs for m = 1 to m = (N/2) – 1 are redundant with frequency output values for m > (N/2). The mth DFT output will have the same magnitude as the (N–m)th DFT output. The phase angle of the DFT's mth output is the negative of the phase angle of the (N–m)th DFT output. So the mth and (N–m)th outputs are related by the following:

We can state that when the DFT input sequence is real, X(m) is the complex conjugate of X(N–m), or
where the superscript * symbol denotes conjugation.
In our example above, notice in Figures 3-4(b) and 3-4(d) that X(5), X(6), and X(7) are the complex conjugates of X(3), X(2), and X(1), respectively. Like the DFT's magnitude symmetry, the real part of X(m) has what is called even symmetry, as shown in Figure 3-4(c), while the DFT's imaginary part has odd symmetry, as shown in Figure 3-4(d). This relationship is what is meant when the DFT is called conjugate symmetric in the literature. It means that, if we perform an N-point DFT on a real input sequence, we'll get N separate complex DFT output terms, but only the first N/2+1 terms are independent. So to obtain the DFT of x(n), we need only compute the first N/2+1 values of X(m) where 0 ≤ m ≤ (N/2); the X(N/2+1) to X(N–1) DFT output terms provide no additional information about the spectrum of the real sequence x(n).
Although Eqs. (3-2) and (3-3) are equivalent, expressing the DFT in the exponential form of Eq. (3-2) has a terrific advantage over the form of Eq. (3-3). Not only does Eq. (3-2) save pen and paper, Eq. (3-2)'s exponentials are much easier to manipulate when we're trying to analyze DFT relationships. Using Eq. (3-2), products of terms become the addition of exponents and, with due respect to Euler, we don't have all those trigonometric relationships to memorize. Let's demonstrate this by proving Eq. (3-14) to show the symmetry of the DFT of real input sequences. Substituting N–m for m in Eq. (3-2), we get the expression for the (N–m)th component of the DFT:

† Using our notation, the complex conjugate of x = a + jb is defined as x* = a – jb; that is, we merely change the sign of the imaginary part of x. In an equivalent form, if x = ejø, then x* = e–jø.
Because e–j2πn = cos(2πn) –jsin(2πn) = 1 for all integer values of n,

We see that X(N–m) in Eq. (3-15') is merely X(m) in Eq. (3-2) with the sign reversed on X(m)'s exponent—and that's the definition of the complex conjugate. This is illustrated by the DFT output phase-angle plot in Figure 3-4(b) for our DFT Example 1. Try deriving Eq. (3-15') using the cosines and sines of Eq. (3-3), and you'll see why the exponential form of the DFT is so convenient for analytical purposes.
There's an additional symmetry property of the DFT that deserves mention at this point. In practice, we're occasionally required to determine the DFT of real input functions where the input index n is defined over both positive and negative values. If that real input function is even, then X(m) is always real and even; that is, if the real x(n) = x(–n), then, Xreal(m) is in general nonzero and Ximag(m) is zero. Conversely, if the real input function is odd, x(n) = –x(–n), then Xreal(m) is always zero and Ximag(m) is, in general, nonzero. This characteristic of input function symmetry is a property that the DFT shares with the continuous Fourier transform, and (don't worry) we'll cover specific examples of it later in Section 3.13 and in Chapter 5.
The DFT has a very important property known as linearity. This property states that the DFT of the sum of two signals is equal to the sum of the transforms of each signal; that is, if an input sequence x1(n) has a DFT X1(m) and another input sequence x2(n) has a DFT X2(m), then the DFT of the sum of these sequences xsum(n) = x1(n) + x2(n) is
This is certainly easy enough to prove. If we plug xsum(n) into Eq. (3-2) to get Xsum(m), then

Without this property of linearity, the DFT would be useless as an analytical tool because we could transform only those input signals that contain a single sinewave. The real-world signals that we want to analyze are much more complicated than a single sinewave.
The DFT Example 1 results of |X(1)| = 4 and |X(2)| = 2 may puzzle the reader because our input x(n) signal, from Eq. (3-11), had peak amplitudes of 1.0 and 0.5, respectively. There's an important point to keep in mind regarding DFTs defined by Eq. (3-2). When a real input signal contains a sinewave component of peak amplitude Ao with an integral number of cycles over N input samples, the output magnitude of the DFT for that particular sinewave is Mr where
If the DFT input is a complex sinusoid of magnitude Ao (i.e., Aoej2πft) with an integral number of cycles over N samples, the output magnitude of the DFT is Mc where
As stated in relation to Eq. (3-13'), if the DFT input was riding on a DC value equal to Do, the magnitude of the DFT's X(0) output will be DoN.
Looking at the real input case for the 1000 Hz component of Eq. (3-11), Ao = 1 and N = 8, so that Mreal = 1 · 8/2 = 4, as our example shows. Equation (3-17) may not be so important when we're using software or floating-point hardware to perform DFTs, but if we're implementing the DFT with fixed-point hardware, we have to be aware that the output can be as large as N/2 times the peak value of the input. This means that, for real inputs, hardware memory registers must be able to hold values as large as N/2 times the maximum amplitude of the input sample values. We discuss DFT output magnitudes in further detail later in this chapter. The DFT magnitude expressions in Eqs. (3-17) and (3-17') are why we occasionally see the DFT defined in the literature as

The 1/N scale factor in Eq. (3-18) makes the amplitudes of X'(m) equal to half the time-domain input sinusoid's peak value at the expense of the additional division by N computation. Thus, hardware or software implementations of the DFT typically use Eq. (3-2) as opposed to Eq. (3-18). Of course, there are always exceptions. There are commercial software packages using

and

for the forward and inverse DFTs. (In Section 3.7, we discuss the meaning and significance of the inverse DFT.) The 1/ ![]() scale factors in Eqs. (3-18') seem a little strange, but they're used so that there's no scale change when transforming in either direction. When analyzing signal spectra in practice, we're normally more interested in the relative magnitudes rather than absolute magnitudes of the individual DFT outputs, so scaling factors aren't usually that important to us.
scale factors in Eqs. (3-18') seem a little strange, but they're used so that there's no scale change when transforming in either direction. When analyzing signal spectra in practice, we're normally more interested in the relative magnitudes rather than absolute magnitudes of the individual DFT outputs, so scaling factors aren't usually that important to us.
The frequency axis m of the DFT result in Figure 3-4 deserves our attention once again. Suppose we hadn't previously seen our DFT Example 1, were given the eight input sample values, from Eq. (3-11'), and asked to perform an 8-point DFT on them. We'd grind through Eq. (3-2) and get the X(m) values shown in Figure 3-4. Next we ask, “What's the frequency of the highest magnitude component in X(m) in Hz?” The answer is not “1.” The answer depends on the original sample rate fs. Without prior knowledge, we have no idea over what time interval the samples were taken, so we don't know the absolute scale of the X(m) frequency axis. The correct answer to the question is to take fs and plug it into Eq. (3-5) with m = 1. Thus, if fs = 8000 samples/s, then the frequency associated with the largest DFT magnitude term is
If we said the sample rate fs was 75 samples/s, we'd know, from Eq. (3-5), that the frequency associated with the largest magnitude term is now
OK, enough of this—just remember that the DFT's frequency spacing (resolution) is fs/N.
To recap what we've learned so far:
each DFT output term is the sum of the term-by-term products of an input time-domain sequence with sequences representing a sine and a cosine wave,
for real inputs, an N-point DFT's output provides only N/2+1 independent terms,
the DFT is a linear operation,
the magnitude of the DFT results are directly proportional to N, and
the DFT's frequency resolution is fs/N.
It's also important to realize, from Eq. (3-5), that X(N/2+1), when m = N/2+1, corresponds to half the sample rate, i.e., the folding (Nyquist) frequency fs/2.
There's an important property of the DFT known as the shifting theorem. It states that a shift in time of a periodic x(n) input sequence manifests itself as a constant phase shift in the angles associated with the DFT results. (We won't derive the shifting theorem equation here because its derivation is included in just about every digital signal processing textbook in print.) If we decide to sample x(n) starting at n equals some integer k, as opposed to n = 0, the DFT of those time-shifted sample values is Xshifted(m) where
Equation (3-19) tells us that, if the point where we start sampling x(n) is shifted to the right by k samples, the DFT output spectrum of Xshifted(m) is X(m) with each of X(m)'s complex terms multiplied by the linear phase shift ej2πkm/N, which is merely a phase shift of 2πkm/N radians or 360km/N degrees. Conversely, if the point where we start sampling x(n) is shifted to the left by k samples, the spectrum of Xshifted(m) is X(m) multiplied by e–j2πkm/N. Let's illustrate Eq. (3-19) with an example.
Suppose we sampled our DFT Example 1 input sequence later in time by k = 3 samples. Figure 3-5 shows the original input time function,
We can see that Figure 3-5 is a continuation of Figure 3-2(a). Our new x(n) sequence becomes the values represented by the solid black dots in Figure 3-5 whose values are

Performing the DFT on Eq. (3-20), Xshifted(m) is

The values in Eq. (3-21) are illustrated as the dots in Figure 3-6. Notice that Figure 3-6(a) is identical to Figure 3-4(a). Equation (3-19) told us that the magnitude of Xshifted(m) should be unchanged from that of X(m). That's a comforting thought, isn't it? We wouldn't expect the DFT magnitude of our original periodic xin(t) to change just because we sampled it over a different time interval. The phase of the DFT result does, however, change depending on the instant at which we started to sample xin(t).
Figure 3-6. DFT results from Example 2: (a) magnitude of Xshifted(m); (b) phase of Xshifted(m); (c) real part of Xshifted(m); (d) imaginary part of Xshifted(m).
By looking at the m = 1 component of Xshifted(m), for example, we can double-check to see that phase values in Figure 3-6(b) are correct. Using Eq. (3-19) and remembering that X(1) from DFT Example 1 had a magnitude of 4 at a phase angle of –90 (or –π/2 radians), k = 3 and N = 8 so that
So Xshifted(1) has a magnitude of 4 and a phase angle of π/4 or +45°, which is what we set out to prove using Eq. (3-19).
Although the DFT is the major topic of this chapter, it's appropriate, now, to introduce the inverse discrete Fourier transform (IDFT). Typically we think of the DFT as transforming time-domain data into a frequency-domain representation. Well, we can reverse this process and obtain the original time- domain signal by performing the IDFT on the X(m) frequency-domain values. The standard expressions for the IDFT are

and equally,

Remember the statement we made in Section 3.1 that a discrete time- domain signal can be considered the sum of various sinusoidal analytical frequencies and that the X(m) outputs of the DFT are a set of N complex values indicating the magnitude and phase of each analysis frequency comprising that sum. Equations (3-23) and (3-23') are the mathematical expressions of that statement. It's very important for the reader to understand this concept. If we perform the IDFT by plugging our results from DFT Example 1 into Eq. (3-23), we'll go from the frequency-domain back to the time-domain and get our original real Eq. (3-11') x(n) sample values of

Notice that Eq. (3-23)'s IDFT expression differs from the DFT's Eq. (3-2) only by a 1/N scale factor and a change in the sign of the exponent. Other than the magnitude of the results, every characteristic that we've covered thus far regarding the DFT also applies to the IDFT.
Hold on to your seat now. Here's where the DFT starts to get really interesting. The two previous DFT examples gave us correct results because the input x(n) sequences were very carefully chosen sinusoids. As it turns out, the DFT of sampled real-world signals provides frequency-domain results that can be misleading. A characteristic, known as leakage, causes our DFT results to be only an approximation of the true spectra of the original input signals prior to digital sampling. Although there are ways to minimize leakage, we can't eliminate it entirely. Thus, we need to understand exactly what effect it has on our DFT results.
Let's start from the beginning. DFTs are constrained to operate on a finite set of N input values sampled at a sample rate of fs, to produce an N-point transform whose discrete outputs are associated with the individual analytical frequencies fanalysis(m), with
Equation (3-24), illustrated in DFT Example 1, may not seem like a problem, but it is. The DFT produces correct results only when the input data sequence contains energy precisely at the analysis frequencies given in Eq. (3-24), at integral multiples of our fundamental frequency fs/N. If the input has a signal component at some intermediate frequency between our analytical frequencies of mfs/N, say 1.5fs/N, this input signal will show up to some degree in all of the N output analysis frequencies of our DFT! (We typically say that input signal energy shows up in all of the DFT's output bins, and we'll see, in a moment, why the phrase “output bins” is appropriate.) Let's understand the significance of this problem with another DFT example.
Assume we're taking a 64-point DFT of the sequence indicated by the dots in Figure 3-7(a). The sequence is a sinewave with exactly three cycles contained in our N = 64 samples. Figure 3-7(b) shows the first half of the DFT of the input sequence and indicates that the sequence has an average value of zero (X(0) = 0) and no signal components at any frequency other than the m = 3 frequency. No surprises so far. Figure 3-7(a) also shows, for example, the m = 4 sinewave analysis frequency, superimposed over the input sequence, to remind us that the analytical frequencies always have an integral number of cycles over our total sample interval of 64 points. The sum of the products of the input sequence and the m = 4 analysis frequency is zero. (Or we can say, the correlation of the input sequence and the m = 4 analysis frequency is zero.) The sum of the products of this particular three-cycle input sequence and any analysis frequency other than m = 3 is zero. Continuing with our leakage example, the dots in Figure 3-8(a) show an input sequence having 3.4 cycles over our N = 64 samples. Because the input sequence does not have an integral number of cycles over our 64-sample interval, input energy has leaked into all the other DFT output bins as shown in Figure 3-8(b).
Figure 3-7. 64-point DFT: (a) input sequence of three cycles and the m = 4 analysis frequency sinusoid; (b) DFT output magnitude.
Figure 3-8. 64-point DFT: (a) 3.4 cycles input sequence and the m = 4 analysis frequency sinusoid; (b) DFT output magnitude.
The m = 4 bin, for example, is not zero because the sum of the products of the input sequence and the m = 4 analysis frequency is no longer zero. This is leakage—it causes any input signal whose frequency is not exactly at a DFT bin center to leak into all of the other DFT output bins. Moreover, leakage is an unavoidable fact of life when we perform the DFT on real-world finite-length time sequences.
Now, as the English philosopher Douglas Adams would say, “Don't panic.” Let's take a quick look at the cause of leakage to learn how to predict and minimize its unpleasant effects. To understand the effects of leakage, we need to know the amplitude response of a DFT when the DFT's input is an arbitrary, real sinusoid. Although Sections 3.14 and 3.15 discuss this issue in detail, for our purposes, here, we'll just say that, for a real cosine input having k cycles in the N-point input time sequence, the amplitude response of an N-point DFT bin in terms of the bin index m is approximated by the sinc function
We'll use Eq. (3-25), illustrated in Figure 3-9(a), to help us determine how much leakage occurs in DFTs. We can think of the curve in Figure 3-9(a), comprising a main lobe and periodic peaks and valleys known as sidelobes, as the continuous positive spectrum of an N-point, real cosine time sequence having k complete cycles in the N-point input time interval. The DFT's outputs are discrete samples that reside on the curves in Figure 3-9; that is, our DFT output will be a sampled version of the continuous spectrum. (We show the DFT's magnitude response to a real input in terms of frequency (Hz) in Figure 3-9(b).) When the DFT's input sequence has exactly an integral k number of cycles (centered exactly in the m = k bin), no leakage occurs, as in Figure 3-9, because when the angle in the numerator of Eq. (3-25) is a nonzero integral multiple of π, the sine of that angle is zero.
Figure 3-9. DFT positive frequency response due to an N-point input sequence containing k cycles of a real cosine: (a) amplitude response as a function of bin index m; (b) magnitude response as a function of frequency in Hz.
By way of example, we can illustrate again what happens when the input frequency k is not located at a bin center. Assume that a real 8-kHz sinusoid, having unity amplitude, has been sampled at a rate of fs = 32,000 samples/s. If we take a 32-point DFT of the samples, the DFT's frequency resolution, or bin spacing, is fs/N = 32,000/32 Hz = 1.0 kHz. We can predict the DFT's magnitude response by centering the input sinusoid's spectral curve at the positive frequency of 8 kHz, as shown in Figure 3-10(a). The dots show the DFT's output bin magnitudes.
Figure 3-10. DFT bin positive frequency responses: (a) DFT input frequency = 8.0 kHz; (b) DFT input frequency = 8.5 kHz; (c) DFT input frequency = 8.75 kHz.
Again, here's the important point to remember: the DFT output is a sampled version of the continuous spectral curve in Figure 3-10(a). Those sampled values in the frequency-domain, located at mfs/N, are the dots in Figure 3-10(a). Because the input signal frequency is exactly at a DFT bin center, the DFT results have only one nonzero value. Stated in another way, when an input sinusoid has an integral number of cycles over N time-domain input sample values, the DFT outputs reside on the continuous spectrum at its peak and exactly at the curve's zero crossing points. From Eq. (3-25) we know the peak output magnitude is 32/2 = 16. (If the real input sinusoid had an amplitude of 2, the peak of the response curve would be 2 · 32/2, or 32.) Figure 3-10(b) illustrates DFT leakage where the input frequency is 8.5 kHz, and we see that the frequency-domain sampling results in nonzero magnitudes for all DFT output bins. An 8.75-kHz input sinusoid would result in the leaky DFT output shown in Figure 3-10(c). If we're sitting at a computer studying leakage by plotting the magnitude of DFT output values, of course, we'll get the dots in Figure 3-10 and won't see the continuous spectral curves.
At this point, the attentive reader should be thinking: “If the continuous spectra that we're sampling are symmetrical, why does the DFT output in Figure 3-8(b) look so asymmetrical?” In Figure 3-8(b), the bins to the right of the third bin are decreasing in amplitude faster than the bins to the left of the third bin. “And another thing, evaluating the continuous spectrum's X(mfs) function at an abscissa value of 0.4 gives a magnitude scale factor of 0.75. Applying this factor to the DFT's maximum possible peak magnitude of 32, we should have a third bin magnitude of approximately 32 · 0.75 = 24—but Figure 3-8(b) shows that the third-bin magnitude is slightly greater than 25. What's going on here?” We answer this by remembering what Figure 3-8(b) really represents. When examining a DFT output, we're normally interested only in the m = 0 to m = (N/2–1) bins. Thus, for our 3.4 cycles per sample interval example in Figure 3-8(b), only the first 32 bins are shown. Well, the DFT is periodic in the frequency domain as illustrated in Figure 3-11. (We address this periodicity issue in Section 3.17.) Upon examining the DFT's output for higher and higher frequencies, we end up going in circles, and the spectrum repeats itself forever.
Figure 3-11. Cyclic representation of the DFT's spectral replication when the DFT input is 3.4 cycles per sample interval.
The more conventional way to view a DFT output is to unwrap the spectrum in Figure 3-11 to get the spectrum in Figure 3-12. Figure 3-12 shows some of the additional replications in the spectrum for the 3.4 cycles per sample interval example. Concerning our DFT output asymmetry problem, as some of the input 3.4-cycle signal amplitude leaks into the 2nd bin, the 1st bin, and the 0th bin, leakage continues into the –1st bin, the –2nd bin, the –3rd bin, etc. Remember, the 63rd bin is the –1st bin, the 62nd bin is the –2nd bin, and so on. These bin equivalencies allow us to view the DFT output bins as if they extend into the negative frequency range, as shown in Figure 3-13(a). The result is that the leakage wraps around the m = 0 frequency bin, as well as around the m = N frequency bin. This is not surprising, because the m = 0 frequency is the m = N frequency. The leakage wraparound at the m = 0 frequency accounts for the asymmetry about the DFT's m = 3 bin in Figure 3-8(b).
Figure 3-13. DFT output magnitude: (a) when the DFT input is 3.4 cycles per sample interval; (b) when the DFT input is 28.6 cycles per sample interval.
Recall from the DFT symmetry discussion, when a DFT input sequence x(n) is real, the DFT outputs from m = 0 to m = (N/2–1) are redundant with frequency bin values for m > (N/2), where N is the DFT size. The mth DFT output will have the same magnitude as the (N–m)th DFT output. That is, |X(m)| = |X(N–m)|. What this means is that leakage wraparound also occurs about the m = N/2 bin. This can be illustrated using an input of 28.6 cycles per sample interval (32 – 3.4) whose spectrum is shown in Figure 3-13(b). Notice the similarity between Figure 3-13(a) and Figure 3-13(b). So the DFT exhibits leakage wraparound about the m = 0 and m = N/2 bins. Minimum leakage asymmetry will occur near the N/4th bin as shown in Figure 3-14(a) where the full spectrum of a 16.4 cycles per sample interval input is provided. Figure 3-14(b) shows a close-up view of the first 32 bins of the 16.4 cycles per sample interval spectrum.
Figure 3-14. DFT output magnitude when the DFT input is 16.4 cycles per sample interval: (a) full output spectrum view; (b) close-up view showing minimized leakage asymmetry at frequency m = N/4.
You could read about leakage all day. However, the best way to appreciate its effects is to sit down at a computer and use a software program to take DFTs, in the form of fast Fourier transforms (FFTs), of your personally generated test signals like those in Figures 3-7 and 3-8. You can, then, experiment with different combinations of input frequencies and various DFT sizes. You'll be able to demonstrate that DFT leakage effect is troublesome because the bins containing low-level signals are corrupted by the sidelobe levels from neighboring bins containing high-amplitude signals.
Although there's no way to eliminate leakage completely, an important technique known as windowing is the most common remedy to reduce its unpleasant effects. Let's look at a few DFT window examples.
Windowing reduces DFT leakage by minimizing the magnitude of Eq. (3-25)'s sinc function's sin(x)/x sidelobes shown in Figure 3-9. We do this by forcing the amplitude of the input time sequence at both the beginning and the end of the sample interval to go smoothly toward a single common amplitude value. Figure 3-15 shows how this process works. If we consider the infinite-duration time signal shown in Figure 3-15(a), a DFT can only be performed over a finite-time sample interval like that shown in Figure 3-15(c). We can think of the DFT input signal in Figure 3-15(c) as the product of an input signal existing for all time, Figure 3-15(a), and the rectangular window whose magnitude is 1 over the sample interval shown in Figure 3-15(b). Anytime we take the DFT of a finite-extent input sequence we are, by default, multiplying that sequence by a window of all ones and effectively multiplying the input values outside that window by zeros. As it turns out, Eq. (3-25)'s sinc function's sin(x)/x shape, shown in Figure 3-9, is caused by this rectangular window because the continuous Fourier transform of the rectangular window in Figure 3-15(b) is the sinc function.
Figure 3-15. Minimizing sample interval endpoint discontinuities: (a) infinite duration input sinusoid; (b) rectangular window due to finite-time sample interval; (c) product of rectangular window and infinite-duration input sinusoid; (d) triangular window function; (e) product of triangular window and infinite-duration input sinusoid; (f) Hanning window function; (g) product of Hanning window and infinite-duration input sinusoid; (h) Hamming window function.
As we'll soon see, it's the rectangular window's abrupt changes between one and zero that are the cause of the sidelobes in the the sin(x)/x sinc function. To minimize the spectral leakage caused by those sidelobes, we have to reduce the sidelobe amplitudes by using window functions other than the rectangular window. Imagine if we multiplied our DFT input, Figure 3-15(c), by the triangular window function shown in Figure 3-15(d) to obtain the windowed input signal shown in Figure 3-15(e). Notice that the values of our final input signal appear to be the same at the beginning and end of the sample interval in Figure 3-15(e). The reduced discontinuity decreases the level of relatively high frequency components in our overall DFT output; that is, our DFT bin sidelobe levels are reduced in magnitude using a triangular window. There are other window functions that reduce leakage even more than the triangular window, such as the Hanning window in Figure 3-15(f). The product of the window in Figure 3-15(f) and the input sequence provides the signal shown in Figure 3-15(g) as the input to the DFT. Another common window function is the Hamming window shown in Figure 3-15(h). It's much like the Hanning window, but it's raised on a pedestal.
Before we see exactly how well these windows minimize DFT leakage, let's define them mathematically. Assuming that our original N input signal samples are indexed by n, where 0 ≤ n ≤ N–1, we'll call the N time-domain window coefficients w(n); that is, an input sequence x(n) is multiplied by the corresponding window w(n) coefficients before the DFT is performed. So the DFT of the windowed x(n) input sequence, Xw(m), takes the form of

To use window functions, we need mathematical expression of them in terms of n. The following expressions define our window function coefficients:
Rectangular window: (also called the uniform, or boxcar, window)
Triangular window: (very similar to the Bartlett[3], and Parzen[4,5] windows)

Hanning window: (also called the raised cosine, Hann, or von Hann window)

Hamming window:

If we plot the w(n) values from Eqs. (3-27) through (3-30), we'd get the corresponding window functions like those in Figures 3-15(b), 3-15(d), 3-15(f), and 3-15(h).[†]
The rectangular window's amplitude response is the yardstick we normally use to evaluate another window function's amplitude response; that is, we typically get an appreciation for a window's response by comparing it to the rectangular window that exhibits the magnitude response shown in Figure 3-9(b). The rectangular window's sin(x)/x magnitude response, |W(m)|, is repeated in Figure 3-16(a). Also included in Figure 3-16(a) are the Hamming, Hanning, and triangular window magnitude responses. (The frequency axis in Figure 3-16 is such that the curves show the response of a single N-point DFT bin when the various window functions are used.) We can see that the last three windows give reduced sidelobe levels relative to the rectangular window. Because the Hamming, Hanning, and triangular windows reduce the time-domain signal levels applied to the DFT, their main lobe peak values are reduced relative to the rectangular window. (Because of the near-zero w(n) coefficients at the beginning and end of the sample interval, this signal level loss is called the processing gain, or loss, of a window.) Be that as it may, we're primarily interested in the windows' sidelobe levels, which are difficult to see in Figure 3-16(a)'s linear scale. We will avoid this difficulty by plotting the windows' magnitude responses on a logarithmic decibel scale, and normalize each plot so its main lobe peak values are zero dB. (Appendix E provides a discussion of the origin and utility of measuring frequency-domain responses on a logarithmic scale using decibels.) Defining the log magnitude response to be |WdB(m)|, we get |WdB(m)| by using the expression
Figure 3-16. Window magnitude responses: (a) |W(m)| on a linear scale; (b) |WdB(m)| on a normalized logarithmic scale.

(The |W(0)| term in the denominator of Eq. (3-31) is the value of W(m) at the peak of the main lobe when m = 0.) The |WdB(m)| curves for the various window functions are shown in Figure 3-16(b). Now we can really see how the various window sidelobe responses compare to each other.
Looking at the rectangular window's magnitude response we see that its main lobe is the most narrow, fs/N. However, unfortunately, its first sidelobe level is only –13 dB below the main lobe peak, which is not so good. (Notice that we're only showing the positive frequency portion of the window responses in Figure 3-16.) The triangular window has reduced sidelobe levels, but the price we've paid is that the triangular window's main lobe width is twice as wide as that of the rectangular window's. The various nonrectangular windows' wide main lobes degrade the windowed DFT's frequency resolution by almost a factor of two. However, as we'll see, the important benefits of leakage reduction usually outweigh the loss in DFT frequency resolution.
Notice the further reduction of the first sidelobe level, and the rapid sidelobe roll-off of the Hanning window. The Hamming window has even lower first sidelobe levels, but this window's sidelobes roll off slowly relative to the Hanning window. This means that leakage three or four bins away from the center bin is lower for the Hamming window than for the Hanning window, and leakage a half dozen or so bins away from the center bin is lower for the Hanning window than for the Hamming window.
When we apply the Hanning window to Figure 3-8(a)'s 3.4 cycles per sample interval example, we end up with the DFT input shown in Figure 3-17(a) under the Hanning window envelope. The DFT outputs for the windowed waveform are shown in Figure 3-17(b) along with the DFT results with no windowing, i.e., the rectangular window. As we expected, the shape of the Hanning window's response looks broader and has a lower peak amplitude, but its sidelobe leakage is noticeably reduced from that of the rectangular window.
Figure 3-17. Hanning window: (a) 64-sample product of a Hanning window and a 3.4 cycles per sample interval input sinewave; (b) Hanning DFT output response vs. rectangular window DFT output response.
We can demonstrate the benefit of using a window function to help us detect a low-level signal in the presence of a nearby high-level signal. Let's add 64 samples of a 7 cycles per sample interval sinewave, with a peak amplitude of only 0.1, to Figure 3-8(a)'s unity-amplitude 3.4 cycles per sample sinewave. When we apply a Hanning window to the sum of these sinewaves, we get the time-domain input shown in Figure 3-18(a). Had we not windowed the input data, our DFT output would be the squares in Figure 3-18(b) where DFT leakage causes the input signal component at m = 7 to be barely discernible. However, the DFT of the windowed data shown as the triangles in Figure 3-18(b) makes it easier for us to detect the presence of the m = 7 signal component. From a practical standpoint, people who use the DFT to perform real-world signal detection have learned that their overall frequency resolution and signal sensitivity are affected much more by the size and shape of their window function than the mere size of their DFTs.
Figure 3-18. Increased signal detection sensitivity afforded using windowing: (a) 64-sample product of a Hanning window and the sum of a 3.4 cycles and a 7 cycles per sample interval sinewaves; (b) reduced leakage Hanning DFT output response vs. rectangular window DFT output response.
As we become more experienced using window functions on our DFT input data, we'll see how different window functions have their own individual advantages and disadvantages. Furthermore, regardless of the window function used, we've decreased the leakage in our DFT output from that of the rectangular window. There are many different window functions described in the literature of digital signal processing—so many, in fact, that they've been named after just about everyone in the digital signal processing business. It's not that clear that there's a great deal of difference among many of these window functions. What we find is that window selection is a trade-off between main lobe widening, first sidelobe levels, and how fast the sidelobes decrease with increased frequency. The use of any particular window depends on the application[5], and there are many applications.
Windows are used to improve DFT spectrum analysis accuracy[6], to design digital filters[7,8], to simulate antenna radiation patterns, and even in the hardware world to improve the performance of certain mechanical force to voltage conversion devices[9]. So there's plenty of window information available for those readers seeking further knowledge. (The mother of all technical papers on windows is that by Harris[10]. A useful paper by Nuttall corrected and extended some portions of Harris's paper[11].) Again, the best way to appreciate windowing effects is to have access to a computer software package that contains DFT, or FFT, routines and start analyzing windowed signals. (By the way, while we delayed their discussion until Section 5.3, there are two other commonly used window functions that can be used to reduce DFT leakage. They're the Chebyshev and Kaiser window functions, which have adjustable parameters, enabling us to strike a compromise between widening main lobe width and reducing sidelobe levels.)
Scalloping is the name used to describe fluctuations in the overall magnitude response of an N-point DFT. Although we derive this fact in Section 3.16, for now we'll just say that when no input windowing function is used, the sin(x)/x shape of the sinc function's magnitude response applies to each DFT output bin. Figure 3-19(a) shows a DFT's aggregate magnitude response by superimposing several sin(x)/x bin magnitude responses.[†] (Because the sinc function's sidelobes are not key to this discussion, we don't show them in Figure 3-19(a).) Notice from Figure 3-19(b) that the overall DFT frequency-domain response is indicated by the bold envelope curve. This rippled curve, also called the picket fence effect, illustrates the processing loss for input frequencies between the bin centers.
Figure 3-19. DFT bin magnitude response curves: (a) individual sin(x)/x responses for each DFT bin; (b) equivalent overall DFT magnitude response.
From Figure 3-19(b), we can determine that the magnitude of the DFT response fluctuates from 1.0, at bin center, to 0.637 halfway between bin centers. If we're interested in DFT output power levels, this envelope ripple exhibits a scalloping loss of almost –4 dB halfway between bin centers. Figure 3-19 illustrates a DFT output when no window (i.e., a rectangular window) is used. Because nonrectangular window functions broaden the DFT's main lobe, their use results in a scalloping loss that will not be as severe as the rectangular window[10,12]. That is, their wider main lobes overlap more and fill in the valleys of the envelope curve in Figure 3-19(b). For example, the scalloping loss of a Hanning window is approximately 0.82, or –1.45 dB, halfway between bin centers. Scalloping loss is not, however, a severe problem in practice. Real-world signals normally have bandwidths that span many frequency bins so that DFT magnitude response ripples can go almost unnoticed. Let's look at a scheme called zero padding that's used to both alleviate scalloping loss effects and to improve the DFT's frequency resolution.
One popular method used to improve DFT spectral estimation is known as zero padding. This process involves the addition of zero-valued data samples to an original DFT input sequence to increase the total number of input data samples. Investigating this zero padding technique illustrates the DFT's important property of frequency-domain sampling alluded to in the discussion on leakage. When we sample a continuous time-domain function, having a continuous Fourier transform (CFT), and take the DFT of those samples, the DFT results in a frequency-domain sampled approximation of the CFT. The more points in our DFT, the better our DFT output approximates the CFT.
To illustrate this idea, suppose we want to approximate the CFT of the continuous f(t) function in Figure 3-20(a). This f(t) waveform extends to infinity in both directions but is nonzero only over the time interval of T seconds. If the nonzero portion of the time function is a sinewave of three cycles in T seconds, the magnitude of its CFT is shown in Figure 3-20(b). (Because the CFT is taken over an infinitely wide time interval, the CFT has infinitesimally small frequency resolution, resolution so fine-grained that it's continuous.) It's this CFT that we'll approximate with a DFT.
Figure 3-20. Continuous Fourier transform: (a) continuous time-domain f(t) of a truncated sinusoid of frequency 3/T; (b) continuous Fourier transform of f(t).
Suppose we want to use a 16-point DFT to approximate the CFT of f(t) in Figure 3-20(a). The 16 discrete samples of f(t), spanning the three periods of f(t)'s sinusoid, are those shown on the left side of Figure 3-21(a). Applying those time samples to a 16-point DFT results in discrete frequency-domain samples, the positive frequency of which are represented by the dots on the right side of Figure 3-21(a). We can see that the DFT output samples Figure 3-20(b)'s CFT. If we append (or zero pad) 16 zeros to the input sequence and take a 32-point DFT, we get the output shown on the right side of Figure 3-21(b), where we've increased our DFT frequency sampling by a factor of two. Our DFT is sampling the input function's CFT more often now. Adding 32 more zeros and taking a 64-point DFT, we get the output shown on the right side of Figure 3-21(c). The 64-point DFT output now begins to show the true shape of the CFT. Adding 64 more zeros and taking a 128-point DFT, we get the output shown on the right side of Figure 3-21(d). The DFT frequency-domain sampling characteristic is obvious now, but notice that the bin index for the center of the main lobe is different for each of the DFT outputs in Figure 3-21.
Figure 3-21. DFT frequency-domain sampling: (a) 16 input data samples and N = 16; (b) 16 input data samples, 16 padded zeros, and N = 32; (c) 16 input data samples, 48 padded zeros, and N = 64; (d) 16 input data samples, 112 padded zeros, and N = 128.
Does this mean we have to redefine the DFT's frequency axis when using the zero-padding technique? Not really. If we perform zero padding on L nonzero input samples to get a total of N time samples for an N-point DFT, the zero-padded DFT output bin center frequencies are related to the original fs by our old friend Eq. (3-5), or
So in our Figure 3-21(a) example, we use Eq. (3-32) to show that, although the zero-padded DFT output bin index of the main lobe changes as N increases, the zero-padded DFT output frequency associated with the main lobe remains the same. The following list shows how this works:
Figure No. | Main lobe peak located at m = | L = | N = | Frequency of main lobe peak relative to fs = |
|---|---|---|---|---|
3 | 16 | 16 | 3fs/16 | |
6 | 16 | 32 | 6·fs/32 = 3fs/16 | |
12 | 16 | 64 | 12·fs/64 = 3fs/16 | |
24 | 16 | 128 | 24·fs/128 = 3fs/16 |
Do we gain anything by appending more zeros to the input sequence and taking larger DFTs? Not really, because our 128-point DFT is sampling the input's CFT sufficiently now in Figure 3-21(d). Sampling it more often with a larger DFT won't improve our understanding of the input's frequency content. The issue here is that adding zeros to an input sequence will improve our DFT's output resolution, but there's a practical limit on how much we gain by adding more zeros. For our example here, a 128-point DFT shows us the detailed content of the input spectrum. We've hit a law of diminishing returns here. Performing a 256-point or 512-point DFT, in our case, would serve little purpose.[†] There's no reason to oversample this particular input sequence's CFT. Of course, there's nothing sacred about stopping at a 128-point DFT. Depending on the number of samples in some arbitrary input sequence and the sample rate, we might, in practice, need to append any number of zeros to get some desired DFT frequency resolution.
There are two final points to be made concerning zero padding. First, the DFT magnitude expressions in Eqs. (3-17) and (3-17') don't apply if zero padding is being used. If we perform zero padding on L nonzero samples of a sinusoid whose frequency is located at a bin center to get a total of N input samples for an N-point DFT, we must replace the N with L in Eqs. (3-17) and (3-17') to predict the DFT's output magnitude for that particular sinewave. Second, in practical situations, if we want to perform both zero padding and windowing on a sequence of input data samples, we must be careful not to apply the window to the entire input including the appended zero-valued samples. The window function must be applied only to the original nonzero time samples, otherwise the padded zeros will zero out and distort part of the window function, leading to erroneous results. (Section 4.5 gives additional practical pointers on performing the DFT using the FFT algorithm to analyze real-world signals.)
To digress slightly, now's a good time to define the term discrete-time Fourier transform (DTFT) that the reader may encounter in the literature. The DTFT is the continuous Fourier transform of an L-point discrete time domain sequence; and some authors use the DTFT to describe many of the digital signal processing concepts we've covered in this chapter. On a computer we can't perform the DTFT because it has an infinitely fine frequency resolution—but we can approximate the DTFT by performing an N-point DFT on an L-point discrete time sequence where N > L. That is, in fact, what we did in Figure 3-21 when we zero-padded the original 16-point time sequence. (When N = L the DTFT approximation is identical to the DFT.)
To make the connection between the DTFT and the DFT, know that the infinite-resolution DTFT magnitude (i.e., continuous Fourier transform magnitude) of the 16 non-zero time samples in Figure 3-21(a) is the shaded sin(x)/x-like spectral function in Figure 3-21. Our DFTs approximate (sample) that function. Increased zero padding of the 16 non-zero time samples merely interpolates our DFT's sampled version of the DTFT function with smaller and smaller frequency-domain sample spacing.
Please keep in mind, however, that zero padding does not improve our ability to resolve, to distinguish between, two closely spaced signals in the frequency domain. (For example, the main lobes of the various spectra in Figure 3-21 do not change in width, if measured in Hz, with increased zero padding.) To improve our true spectral resolution of two signals, we need more non-zero time samples. The rule by which we must live is: to realize Fres Hz spectral resolution, we must collect 1/Fres seconds worth of non-zero time samples for our DFT processing.
We'll discuss applications of time-domain zero padding in Section 13.15, revisit the DTFT in Section 3.17, and frequency-domain zero padding in Section 13.28.
There are two types of processing gain associated with DFTs. People who use the DFT to detect signal energy embedded in noise often speak of the DFT's processing gain because the DFT can pull signals out of background noise. This is due to the inherent correlation gain that takes place in any N-point DFT. Beyond this natural processing gain, additional integration gain is possible when multiple DFT outputs are averaged. Let's look at the DFT's inherent processing gain first.
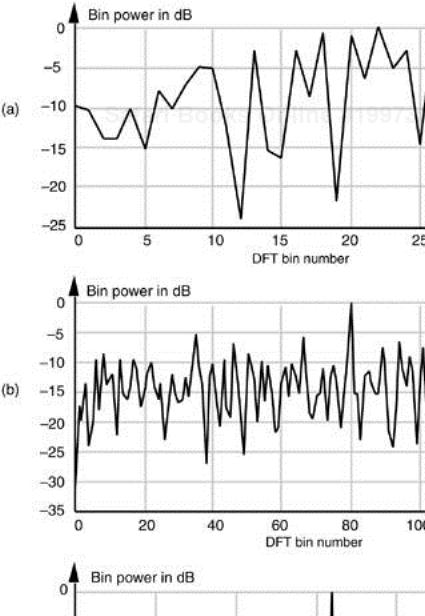
The concept of the DFT having processing gain is straightforward if we think of a particular DFT bin output as the output of a narrowband filter. Because a DFT output bin has the amplitude response of the sin(x)/x function, that bin's output is primarily due to input energy residing under, or very near, the bin's main lobe. It's valid to think of a DFT bin as a kind of bandpass filter whose band center is located at mfs/N. We know from Eq. (3-17) that the maximum possible DFT output magnitude increases as the number of points (N) in a DFT increases. Also, as N increases, the DFT output bin main lobes become more narrow. So a DFT output bin can be treated as a bandpass filter whose gain can be increased and whose bandwidth can be reduced by increasing the value of N. Decreasing a bandpass filter's bandwidth is useful in energy detection because the frequency resolution improves in addition to the filter's ability to minimize the amount of background noise that resides within its passband. We can demonstrate this by looking at the DFT of a spectral tone (a constant frequency sinewave) added to random noise. Figure 3-22(a) is a logarithmic plot showing the first 32 outputs of a 64-point DFT when the input tone is at the center of the DFT's m = 20th bin. The output power levels (DFT magnitude squared) in Figure 3-22(a) are normalized so that the highest bin output power is set to 0 dB. Because the tone's original signal power is below the average noise power level, the tone is a bit difficult to detect when N = 64. (The time-domain noise, used to generate Figure 3-22(a), has an average value of zero, i.e., no DC bias or amplitude offset.) If we quadruple the number of input samples and increase the DFT size to N = 256, we can now see the tone power raised above the average background noise power as shown for m = 80 in Figure 3-22(b). Increasing the DFT's size to N = 1024 provides additional processing gain to pull the tone further up out of the noise as shown in Figure 3-22(c).
To quantify the idea of DFT processing gain, we can define a signal-to-noise ratio (SNR) as the DFT's output signal-power level over the average output noise-power level. (In practice, of course, we like to have this ratio as large as possible.) For several reasons, it's hard to say what any given single DFT output SNR will be. That's because we can't exactly predict the energy in any given N samples of random noise. Also, if the input signal frequency is not at bin center, leakage will raise the effective background noise and reduce the DFT's output SNR. In addition, any window being used will have some effect on the leakage and, thus, on the output SNR. What we'll see is that the DFT's output SNR increases as N gets larger because a DFT bin's output noise standard deviation (rms) value is proportional to ![]() , and the DFT's output magnitude for the bin containing the signal tone is proportional to N. More generally for real inputs, if N > N', an N-point DFT's output SNRN increases over the N'-point DFT SNRN, by the following relationship:
, and the DFT's output magnitude for the bin containing the signal tone is proportional to N. More generally for real inputs, if N > N', an N-point DFT's output SNRN increases over the N'-point DFT SNRN, by the following relationship:

If we increase a DFT's size from N' to N = 2N', from Eq. (3-33), the DFT's output SNR increases by 3 dB. So we say that a DFT's processing gain increases by 3 dB whenever N is doubled. Be aware that we may double a DFT's size and get a resultant processing gain of less than 3 dB in the presence of random noise; then again, we may gain slightly more than 3 dB. That's the nature of random noise. If we perform many DFTs, we'll see an average processing gain, shown in Figure 3-23(a), for various input signal SNRs. Because we're interested in the slope of the curves in Figure 3-23(a), we plot those curves on a logarithmic scale for N in Figure 3-23(b) where the curves straighten out and become linear. Looking at the slope of the curves in Figure 3-23(b), we can now see the 3 dB increase in processing gain as N doubles so long as N is greater than 20 or 30 and the signal is not overwhelmed by noise. There's nothing sacred about the absolute values of the curves in Figures 3-23(a) and 3-23(b). They were generated through a simulation of noise and a tone whose frequency was at a DFT bin center. Had the tone's frequency been between bin centers, the processing gain curves would have been shifted downward, but their shapes would still be the same,[†] that is, Eq. (3-33) is still valid regardless of the input tone's frequency.
Theoretically, we could get very large DFT processing gains by increasing the DFT size arbitrarily. The problem is that the number of necessary DFT multiplications increases proportionally to N2, and larger DFTs become very computationally intensive. Because addition is easier and faster to perform than multiplication, we can average the outputs of multiple DFTs to obtain further processing gain and signal detection sensitivity. The subject of averaging multiple DFT outputs is covered in Section 11.3.
We conclude this chapter by providing the mathematical details of two important aspects of the DFT. First, we obtain the expressions for the DFT of a rectangular function (rectangular window), and then we'll use these results to illustrate the magnitude response of the DFT. We're interested in the DFT's magnitude response because it provides an alternate viewpoint to understand the leakage that occurs when we use the DFT as a signal analysis tool.
One of the most prevalent and important computations encountered in digital signal processing is the DFT of a rectangular function. We see it in sampling theory, window functions, discussions of convolution, spectral analysis, and in the design of digital filters. As common as it is, however, the literature covering the DFT of rectangular functions can be confusing for several reasons for the digital signal processing beginner. The standard mathematical notation is a bit hard to follow at first, and sometimes the equations are presented with too little explanation. Compounding the problem, for the beginner, are the various expressions of this particular DFT. In the literature, we're likely to find any one of the following forms for the DFT of a rectangular function:

In this section we'll show how the forms in Eq. (3-34) were obtained, see how they're related, and create a kind of Rosetta stone table allowing us to move back and forth between the various DFT expressions. Take a deep breath and let's begin our discussion with the definition of a rectangular function.
A general rectangular function x(n) can be defined as N samples containing K unity-valued samples as shown in Figure 3-24. The full N-point sequence, x(n), is the rectangular function that we want to transform. We call this the general form of a rectangular function because the K unity samples begin at a arbitrary index value of –no. Let's take the DFT of x(n) in Figure 3-24 to get our desired X(m). Using m as our frequency-domain sample index, the expression for an N-point DFT is

With x(n) being nonzero only over the range of –no ≤ n ≤ –no + (K–1), we can modify the summation limits of Eq. (3-35) to express X(m) as

because only the K samples contribute to X(m). That last step is important because it allows us to eliminate the x(n) terms and make Eq. (3-36) easier to handle. To keep the following equations from being too messy, let's use the dummy variable q = 2πm/N.
OK, here's where the algebra comes in. Over our new limits of summation, we eliminate the factor of 1 and Eq. (3-36) becomes

The series inside the brackets of Eq. (3-37) allows the use of a summation, such as

Equation (3-38) certainly doesn't look any simpler than Eq. (3-36), but it is. Equation (3-38) is a geometric series and, from the discussion in Appendix B, it can be evaluated to the closed form of

We can now simplify Eq. (3-39)—here's the clever step. If we multiply and divide the numerator and denominator of Eq. (3-39)'s right-hand side by the appropriate half-angled exponentials, we break the exponentials into two parts and get

Let's pause for a moment here to remind ourselves where we're going. We're trying to get Eq. (3-40) into a usable form because it's part of Eq. (3-38) that we're using to evaluate X(m) in Eq. (3-36) in our quest for an understandable expression for the DFT of a rectangular function.
Equation (3-40) looks even more complicated than Eq. (3-39), but things can be simplified inside the parentheses. From Euler's equation: sin(ø) = (ejø – e–jø)/2j, Eq. (3-40) becomes

Substituting Eq. (3-41) for the summation in Eq. (3-38), our expression for X(q) becomes

Returning our dummy variable q to its original value of 2πm/N,

So there it is (Whew!). Equation (3-43) is the general expression for the DFT of the rectangular function as shown in Figure 3-24. Our X(m) is a complex expression (pun intended) where a ratio of sine terms is the amplitude of X(m) and the exponential term is the phase angle of X(m).[†] The ratio of sines factor in Eq. (3-43) lies on the periodic curve shown in Figure 3-25(a), and like all N-point DFT representations, the periodicity of X(m) is N. This curve is known as the Dirichlet kernel (or the aliased sinc function) and has been thoroughly described in the literature[10,13,14]. (It's named after the nineteenth-century German mathematician Peter Dirichlet (pronounced dee-ree-klay'), who studied the convergence of trigonometric series used to represent arbitrary functions.)
Figure 3-25. The Dirichlet kernel of X(m): (a) periodic continuous curve on which the X(m) samples lie; (b) X(m) amplitudes about the m = 0 sample; (c) |X(m)| magnitudes about the m = 0 sample.
We can zoom in on the curve at the m = 0 point and see more detail in Figure 3-25(b). The dots are shown in Figure 3-25(b) to remind us that the DFT of our rectangular function results in discrete amplitude values that lie on the curve. So when we perform DFTs, our discrete results are sampled values of the continuous sinc function's curve in Figure 3-25(a). As we'll show later, we're primarily interested in the absolute value, or magnitude, of the Dirichlet kernel in Eq. (3-43). That magnitude |X(m)| is shown in Figure 3-25(c). Although we first saw the sinc function's curve in Figure 3-9 in Section 3.8, where we introduced the topic of DFT leakage, we'll encounter this curve often in our study of digital signal processing.
For now, there are just a few things we need to keep in mind concerning the Dirichlet kernel. First, the DFT of a rectangular function has a main lobe, centered about the m = 0 point. The peak amplitude of the main lobe is K. This peak value makes sense, right? The m = 0 sample of a DFT X(0) is the sum of the original samples, and the sum of K unity-valued samples is K. We can show this in a more substantial way by evaluating Eq. (3-43) for m = 0. A difficulty arises when we plug m = 0 into Eq. (3-43) because we end up with sin(0)/sin(0), which is the indeterminate ratio 0/0. Well, hardcore mathematics to the rescue here. We can use L'Hopital's rule to take the derivative of the numerator and the denominator of Eq. (3-43), and then set m = 0 to determine the peak value of the magnitude of the Dirichlet kernel.[††] We proceed as

which is what we set out to show. (We could have been clever and evaluated Eq. (3-35) with m = 0 to get the result of Eq. (3-44). Try it, and keep in mind that ej0 = 1.) Had the amplitudes of the nonzero samples of x(n) been different than unity, say some amplitude Ao, then, of course, the peak value of the Dirichlet kernel would be AoK instead of just K. The next important thing to notice about the Dirichlet kernel is the main lobe's width. The first zero crossing of Eq. (3-43) occurs when the numerator's argument is equal to π. That is, when πmK/N = π. So the value of m at the first zero crossing is given by

as shown in Figure 3-25(b). Thus the main lobe width 2N/K, as shown in Figure 3-25(c), is inversely proportional to K.[†]
Notice that the main lobe in Figure 3-25(a) is surrounded by a series of oscillations, called sidelobes, as in Figure 3-25(c). These sidelobe magnitudes decrease the farther they're separated from the main lobe. However, no matter how far we look away from the main lobe, these sidelobes never reach zero magnitude—and they cause a great deal of heartache for practitioners in digital signal processing. These sidelobes cause high-amplitude signals to overwhelm and hide neighboring low-amplitude signals in spectral analysis, and they complicate the design of digital filters. As we'll see in Chapter 5, the unwanted ripple in the passband and the poor stopband attenuation in simple digital filters are caused by the rectangular function's DFT sidelobes. (The development, analysis, and application of window functions came about to minimize the ill effects of those sidelobes in Figure 3-25.)
Let's demonstrate the relationship in Eq. (3-45) by way of a simple but concrete example. Assume that we're taking a 64-point DFT of the 64-sample rectangular function, with eleven unity values, shown in Figure 3-26(a). In this example, N = 64 and K = 11. Taking the 64-point DFT of the sequence in Figure 3-26(a) results in an X(m) whose real and imaginary parts, Xreal(m) and Ximag(m), are shown in Figure 3-26(b) and Figure 3-26(c) respectively. Figure 3-26(b) is a good illustration of how the real part of the DFT of a real input sequence has even symmetry, and Figure 3-26(c) confirms that the imaginary part of the DFT of a real input sequence has odd symmetry.
Figure 3-26. DFT of a rectangular function: (a) original function x(n) ; (b) real part of the DFT of x(n), Xreal(m); (c) imaginary part of the DFT of x(n), Ximag(m).
Although Xreal(m) and Ximag(m) tell us everything there is to know about the DFT of x(n), it's a bit easier to comprehend the true spectral nature of X(m) by viewing its absolute magnitude. This magnitude, from Eq. (3-7), is provided in Figure 3-27(a) where the main and sidelobes are clearly evident now. As we expected, the peak value of the main lobe is 11 because we had K = 11 samples in x(n). The width of the main lobe from Eq. (3-45) is 64/11, or 5.82. Thus, the first positive frequency zero-crossing location lies just below the m = 6 sample of our discrete |X(m)| represented by the squares in Figure 3-27(a). The phase angles associated with |X(m)|, first introduced in Equations (3-6) and (3-8), are shown in Figure 3-27(b).
Figure 3-27. DFT of a generalized rectangular function: (a) magnitude |X(m)|; (b) phase angle in radians.
To understand the nature of the DFT of rectangular functions more fully, let's discuss a few more examples using less general rectangular functions that are more common in digital signal processing than the x(n) in Figure 3-24.
Equation (3-43) is a bit complicated because our original function x(n) was so general. In practice, special cases of rectangular functions lead to simpler versions of Eq. (3-43). Consider the symmetrical x(n) rectangular function in Figure 3-28. As shown in Figure 3-28, we often need to determine the DFT of a rectangular function that's centered about the n = 0 index point. In this case, the K unity-valued samples begin at n = –no = –(K–1)/2. So substituting (K–1)/2 for no in Eq. (3-43) yields

Because ej0 = 1, Eq. (3-46) becomes
Equation (3-47) indicates that the DFT of the symmetrical rectangular function in Figure 3-28 is itself a real function; that is, there's no complex exponential in Eq. (3-47), so this particular DFT contains no imaginary part or phase term. As we stated in Section 3.2, if x(n) is real and even, x(n) = x(–n), then Xreal(m) is nonzero and Ximag(m) is always zero. We demonstrate this by taking the 64-point DFT of the sequence in Figure 3-29(a). Our x(n) is 11 unity-valued samples centered about the n = 0 index. Here the DFT results in an X(m) whose real and imaginary parts are shown in Figure 3-29(b) and Figure 3-29(c), respectively. As Eq. (3-47) predicted, Xreal(m) is nonzero and Ximag(m) is zero. The magnitude and phase of X(m) are depicted in Figure 3-29(d) and Figure 3-29(e).
Figure 3-29. DFT of a rectangular function centered about n = 0: (a) original x(n) ; (b) Xreal(m); (c) Ximag(m); (d) magnitude of X(m); (e) phase angle of X(m) in radians.
Notice that the magnitudes in Figure 3-27(a) and Figure 3-29(d) are identical. This verifies the very important shifting theorem of the DFT; that is, the magnitude |X(m)| depends only on the number of nonzero samples in x(n), K, and not on their position relative to the n = 0 index value. Shifting the K unity-valued samples to center them about the n = 0 index merely affects the phase angle of X(m), not its magnitude.
Speaking of phase angles, it's interesting to realize here that even though Ximag(m) is zero in Figure 3-29(c), the phase angle of X(m) is not always zero. In this case, X(m)'s individual phase angles in Figure 3-29(e) are either +π, zero, or –π radians. With +π and –π radians both being equal to –1, we could easily reconstruct Xreal(m) from |X(m)| and the phase angle Xø(m) if we must. Xreal(m) is equal to |X(m)| with the signs of |X(m)|'s alternate sidelobes reversed.[†] To gain some further appreciation of how the DFT of a rectangular function is a sampled version of the Dirichlet kernel, let's increase the number of our nonzero x(n) samples. Figure 3-30(a) shows a 64-point x(n) where 31 unity-valued samples are centered about the n = 0 index location. The magnitude of X(m) is provided in Figure 3-30(b). By broadening the x(n) function, i.e., increasing K, we've narrowed the Dirichlet kernel of X(m). This follows from Eq. (3-45), right? The kernel's first zero crossing is inversely proportional to K, so, as we extend the width of K, we squeeze |X(m)| in toward m = 0. In this example, N = 64 and K = 31. From Eq. (3-45) the first positive zero crossing of X(m) occurs at 64/31, or just slightly to the right of the m = 2 sample in Figure 3-30(b). Also notice that the peak value of |X(m)| = K = 31, as mandated by Eq. (3-44).
The DFT of a special form of x(n) is routinely called for, leading to yet another simplified form of Eq. (3-43). In the literature, we often encounter a rectangular function where K = N; that is, all N samples of x(n) are nonzero, as shown in Figure 3-31. In this case, the N unity-valued samples begin at n = –no = –(N–1)/2. We obtain the expression for the DFT of the function in Figure 3-31 by substituting K = N and no = (N–1)/2 in Eq. (3-43) to get

Equation (3-48) takes the first form of Eq. (3-34) that we alluded to at the beginning of Section 3.13.[1] Figure 3-32 demonstrates the meaning of Eq. (3-48). The DFT magnitude of the all ones function, x(n) in Figure 3-32(a), is shown in Figure 3-32(b) and Figure 3-32(c). Take note that if m was continuous Eq. (3-48) describes the shaded curves in Figure 3-32(b) and Figure 3-32(c). If m is restricted to be integers, then Eq. (3-48) represents the dots in those figures.
Figure 3-32. All ones function: (a) rectangular function with N = 64 unity-valued samples; (b) DFT magnitude of the all ones time function; (c) close-up view of the DFT magnitude of an all ones time function.
The Dirichlet kernel of X(m) in Figure 3-32(b) is now as narrow as it can get. The main lobe's first positive zero crossing occurs at the m = 64/64 = 1 sample in Figure 3-32(b) and the peak value of |X(m)| = N = 64. With x(n) being all ones, |X(m)| is zero for all m ≠ 0. The sinc function in Eq. (3-48) is of utmost importance—as we'll see at the end of this chapter, it defines the overall DFT frequency response to an input sinusoidal sequence, and it's also the amplitude response of a single DFT bin.
The form of Eq. (3-48) allows us to go one step further to identify the most common expression for the DFT of an all ones rectangular function found in the literature. To do this, we have to use an approximation principle found in the mathematics of trigonometry that you may have heard before. It states that when α is small, then sin(α) is approximately equal to α, i.e., sin(α) ≈ α. This idea comes about when we consider a pie-shaped section of a circle whose radius is 1 as shown in Figure 3-33(a). That section is defined by the length of the arc α measured in radians and α's chord b. If we draw a right triangle inside the section, we can say that a = sin(α). As α gets smaller the long sides of our triangle become almost parallel, the length of chord b approaches the length of arc α, and the length of line a approaches the length of b. So, as depicted in Figure 3-33(b), when α is small, α ≈ b ≈ a = sin(α). We use this sin(α) ≈ α approximation when we look at the denominator of Eq. (3-48). When πm/N is small, then sin(πm/N) is approximately equal to πm/N. So we can, when N is large, state
Figure 3-33. Relationships between an angle α, line a = sin(α), and α's chord b: (a) large angle α; (b) small angle α.
It has been shown that when N is larger than, say, 10 in Eq. (3-48), Eq. (3-49) accurately describes the DFT's output.[†] Equation (3-49) is often normalized by dividing it by N, so we can express the normalized DFT of an all ones rectangular function as
Equation (3-50), taking the second form of Eq. (3-34) that is so often seen in the literature, also has the DFT magnitude shown in Figure 3-32(b) and Figure 3-32(c).
Let's establish the physical dimensions associated with the n and m index values. So far in our discussion, the n index was merely an integer enabling us to keep track of individual x(n) sample values. If the n index represents instants in time, we can identify the time period separating adjacent x(n) samples to establish the time scale for the x(n) axis and the frequency scale for the X(m) axis. Consider the time-domain rectangular function given in Figure 3-34(a). That function comprises N time samples obtained ts seconds apart, and the full sample interval is Nts seconds. Each x(n) sample occurs at nts seconds for some value of n. For example, the n = 9 sample value, x(9) = 0, occurs at 9ts seconds.
Figure 3-34. DFT time and frequency axis dimensions: (a) time-domain axis uses time index n; (b) various representations of the DFT's frequency axis.
The frequency axis of X(m) can be represented in a number of different ways. Three popular types of DFT frequency axis labeling are shown in Figure 3-34(b) and listed in Table 3-1. Let's consider each representation individually.
If we decide to relate X(m) to the time sample period ts, or the sample rate fs = 1/ts, then the frequency axis variable is m/Nts = mfs/N. So each X(m) sample is associated with a cyclic frequency of mfs/N Hz. In this case, the resolution of X(m) is fs/N. The DFT repetition period, or periodicity, is fs Hz, as shown in Figure 3-34(b). If we substitute the cyclic frequency variable mfs/N for the generic variable of m/N in Eq. (3-47), we obtain an expression for the DFT of a symmetrical rectangular function, where K < N, in terms of the sample rate fs in Hz. That expression is
Table 3-1. Characteristics of Various DFT Frequency Axis Representations
DFT Frequency Axis Representation | X(m) Frequency Variable | Resolution of X(m) | Repetition Interval of X(m) | Frequency Axis Range |
|---|---|---|---|---|
Frequency in Hz | mfs/N | fs/N | fs | –fs/2 to fs/2 |
Frequency in radians | mωs/N or 2πmfs/N | ωs/N or 2πfs/N | ωs or 2πfs | –ωs/2 to ωs/2 or –πfs to πfs |
Normalized angle in radians | 2πm/N | 2π/N | 2π | –π to π |
For an all ones rectangular function where K = N, the amplitude normalized sin(x)/x approximation in Eq. (3-50) can be rewritten in terms of sample rate fs in Hz as
We can measure X(m)'s frequency in radians/s by defining the time-domain sample rate in radians/s as ωs = 2πfs. So each X(m) sample is associated with a radian frequency of mωs/N = 2πmfs/N radians/s. In this case, X(m)'s resolution is ωs/N = 2πfs/N radians/s, and the DFT repetition period is ωs = 2πfs radians/s, as shown by the expressions in parentheses in Figure 3-34(b). With ωs = 2πfs, then πfs = ωs/2. If we substitute ωs/2 for πfs in Eq. (3-51), we obtain an expression for the DFT of a symmetrical rectangular function, where K < N, in terms of the sample rate ωs in radians/s:
For an all ones rectangular function where K = N, the amplitude normalized sin(x)/x approximation in Eq. (3-50) can be stated in terms of a sample rate ωs in radians/s as
Many authors simplify the notation of their equations by using a normalized variable for the radian frequency ωs = 2πfs. By normalized, we mean that the sample rate fs is assumed to be equal to 1, and this establishes a normalized radian frequency ωs equal to 2π. Thus, the frequency axis of X(m) now becomes a normalized angle ω, and each X(m) sample is associated with an angle of mω/N radians. Using this convention, X(m)'s resolution is ω/N radians, and the DFT repetition period is ω= 2π radians, as shown by the expressions in brackets in Figure 3-34(b).
Unfortunately the usage of these three different representations of the DFT's frequency axis is sometimes confusing for the beginner. When reviewing the literature, the reader can learn to convert between these frequency axis notations by consulting Figure 3-34 and Table 3-1.
Using the normalized radian angle notation for the DFT axis from the bottom row of Table 3-1 leads to another prevalent form of the DFT of the all ones rectangular function in Figure 3-31. Letting our normalized discrete frequency axis variable be ωm = 2πm/N, then πm = Nωm/2. Substituting the term Nωm/2 for πm in Eq. (3-48), we obtain
Equation (3-55), taking the third form of Eq. (3-34) sometimes seen in the literature, also has the DFT magnitude shown in Figure 3-32(b) and Figure 3-32(c).
We've covered so many different expressions for the DFT of various rectangular functions that it's reasonable to compile their various forms in Table 3-2.
Let's think now about computing the inverse DFT of a rectangular frequency-domain function; that is, given a rectangular X(m) function, find a time- domain function x(n). We can define the general form of a rectangular frequency-domain function, as we did for Figure 3-24, to be that shown in Figure 3-35. The inverse DFT of the rectangular function X(m) in Figure 3-35 is


Figure 3-35. General rectangular frequency-domain function of width K samples defined over N samples where K < N.
The same algebraic acrobatics we used to arrive at Eq. (3-43) can be applied to Eq. (3-56), guiding us to
for the inverse DFT of the rectangular function in Figure 3-35. The descriptions we gave for Eq. (3-43) apply equally well to Eq. (3-57) with the exception of a 1/N scale factor term and a change in the sign of Eq. (3-43)'s phase angle. Let's use Eq. (3-57) to take a 64-point inverse DFT of the 64-sample rectangular function shown in Figure 3-36(a). The inverse DFT of the sequence in Figure 3-36(a) results in an x(n) whose real and imaginary parts, xreal(n) and ximag(n), are shown in Figure 3-36(b) and Figure 3-36(c), respectively. With N = 64 and K = 11 in this example, we've made the inverse DFT functions in Figure 3-36 easy to compare with those forward DFT functions in Figure 3-26. See the similarity between the real parts, Xreal(m) and xreal(n), in Figure 3-26(b) and Figure 3-36(b)? Also notice the sign change between the imaginary parts in Figure 3-26(c) and Figure 3-36(c).
Figure 3-36. Inverse DFT of a general rectangular function: (a) original function X(m); (b) real part, xreal(n); (c) imaginary part, ximag(n).
Table 3-2. DFT of Various Rectangular Functions
Description | Expression |
|---|---|
DFT of a general rectangular function, where K < N, in terms of the integral frequency m variable | |
DFT of a symmetrical rectangular function, where K < N, in terms of the integral frequency variable m | |
DFT of an all ones rectangular function in terms of the integer frequency variable m (Dirichlet kernel Type 1) | |
DFT of an all ones rectangular function in terms of the integer frequency variable m (Dirichlet kernel Type 2) | |
Amplitude normalized DFT of an all ones rectangular function in terms of the integral frequency variable m (Dirichlet kernel Type 3) | |
DFT of a symmetrical rectangular function, where K < N, in terms of the sample rate fs in Hz | |
Amplitude normalized DFT of an all ones rectangular function in terms of the sample rate fs in Hz | |
DFT of a symmetrical rectangular function, where K < N, in terms of the sample rate ωs in radians/s | |
Amplitude normalized DFT of an all ones rectangular function in terms of the sample rate ωs in radians/s | |
DFT of an all ones rectangular function in terms of the normalized discrete frequency variable ωm (Dirichlet kernel Type 4). |

The magnitude and phase angle of x(n) are shown in Figure 3-37(a) and Figure 3-37(b). Note the differences in main lobe peak magnitude between Figure 3-27(a) and Figure 3-37(a). The peak magnitude value in Figure 3-37(a) is K/N = 11/64, or 0.172. Also notice the sign change between the phase angles in Figure 3-27(b) and Figure 3-37(b). The illustrations in Figures 3-26, 3-27, 3-36, and 3-37 are good examples of the fundamental duality relationships between the forward and inverse DFT.
The inverse DFT of the general rectangular function in Figure 3-36 is not very common in digital signal processing. However, in discussions concerning digital filters, we will encounter the inverse DFT of symmetrical rectangular functions. This inverse DFT process is found in the window design method of what are called low-pass finite impulse response (FIR) digital filters. That method begins with the definition of a symmetrical frequency function, H(m), such as that in Figure 3-38. The inverse DFT of the frequency samples in Figure 3-38 is then taken to determine the time-domain coefficients for use in a low-pass FIR filter. (Time-domain FIR filter coefficients are typically denoted h(n) instead of x(n), so we'll use h(n) throughout the remainder of this inverse DFT discussion.)

In the case of the frequency domain H(m) in Figure 3-38, the K unity- valued samples begin at m = –mo = –(K–1)/2. So plugging (K–1)/2 in for mo in Eq. (3-57) gives

Again, because ej0 = 1, Eq. (3-58) becomes
Equation (3-59) tells us that the inverse DFT of the symmetrical rectangular function in Figure 3-38 is itself a real function that we can illustrate by example. We'll perform a 64-point inverse DFT of the sequence in Figure 3-39(a). Our H(m) is 11 unity-valued samples centered about the m = 0 index. Here the inverse DFT results in an h(n) whose real and imaginary parts are shown in Figure 3-39(b) and Figure 3-39(c), respectively. As Eq. (3-47) predicted, hreal(n) is nonzero and himag(n) is zero. The magnitude and phase of h(n) are depicted in Figure 3-39(d) and Figure 3-39(e). (Again, we've made the functions in Figure 3-39 easy to compare with the forward DFT function in Figure 3-29.) It is h(n)'s real part that we're really after here. Those values of hreal(n) are used for the time-domain filter coefficients in the design of FIR low-pass filters that we'll discuss in Section 5.3.
In this section, we'll determine the frequency response to an N-point DFT when its input is a discrete sequence representing a complex sinusoid expressed as xc(n). By frequency response we mean the DFT output samples when a complex sinusoidal sequence is applied to the DFT. We begin by depicting an xc(n) input sequence in Figure 3-40. This time sequence is of the form
Figure 3-40. Complex time-domain sequence xc(n) = ej2πnk/N having two complete cycles (k = 2) over N samples: (a) real part of xc(n); (b) imaginary part of xc(n).
where k is the number of complete cycles occurring in the N samples. Figure 3-40 shows xc(n) if we happen to let k = 2. If we denote our DFT output sequence as Xc(m), and apply our xc(n) input to the DFT expression in Eq. (3-2) we have

If we let N = K, n = p, and q = –2π(k–m)/N, Eq. (3-61) becomes

Why did we make the substitutions in Eq. (3-61) to get Eq. (3-62)? Because, happily, we've already solved Eq. (3-62) when it was Eq. (3-39). That closed form solution was Eq. (3-41) that we repeat here as

Replacing our original variables from Eq. (3-61), we have our answer:
Like the Dirichlet kernel in Eq. (3-43), the Xc(m) in Eq. (3-64) is a complex expression where a ratio of sine terms is the amplitude of Xc(m) and the exponential term is the phase angle of Xc(m). At this point, we're interested only in the ratio of sines factor in Eq. (3-64). Its magnitude is shown in Figure 3-41. Notice that, because xc(n) is complex, there are no negative frequency components in Xc(m). Let's think about the shaded curve in Figure 3-41 for a moment. That curve is the continuous Fourier transform of the complex xc(n) and can be thought of as the continuous spectrum of the xc(n) sequence.[1] By continuous spectrum we mean a spectrum that's defined at all frequencies, not just at the periodic fs/N analysis frequencies of an N-point DFT. The shape of this spectrum with its main lobe and sidelobes is a direct and unavoidable effect of analyzing any finite-length time sequence, such as our xc(n) in Figure 3-40.
Figure 3-41. N-point DFT frequency magnitude response to a complex sinusoid having integral k cycles in the N-point time sequence xc(n) = ej2πnk/N.
We can conceive of obtaining this continuous spectrum analytically by taking the continuous Fourier transform of our discrete xc(n) sequence, a process some authors call the discrete-time Fourier transform (DTFT), but we can't actually calculate the continuous spectrum on a computer. That's because the DTFT is defined only for infinitely long time sequences, and the DTFT's frequency variable is continuous with infinitely fine-grained resolution. What we can do, however, is use the DFT to calculate an approximation of xc(n)'s continuous spectrum. The DFT outputs represented by the dots in Figure 3-41 are a discrete sampled version of xc(n)'s continuous spectrum. We could have sampled that continuous spectrum more often, i.e., approximated it more closely, with a larger DFT by appending additional zeros to the original xc(n) sequence. We actually did that in Figure 3-21.
Figure 3-41 shows us why, when an input sequence's frequency is exactly at the m = k bin center, the DFT output is zero for all bins except where m = k. If our input sequence frequency was k+0.25 cycles in the sample interval, the DFT will sample the continuous spectrum shown in Figure 3-42, where all of the DFT output bins would be nonzero. This effect is a demonstration of DFT leakage described in Section 3.8.
Figure 3-42. N-point DFT frequency magnitude response showing spectral leakage of a complex sinusoid having k+0.25 cycles in the N-point time sequence xc(n).
Again, just as there are several different expressions for the DFT of a rectangular function that we listed in Table 3-2, we can express the amplitude response of the DFT to a complex input sinusoid in different ways to arrive at Table 3-3.
At this point, the thoughtful reader may notice that the DFT's response to a complex input of k cycles per sample interval in Figure 3-41 looks suspiciously like the DFT's response to an all ones rectangular function in Figure 3-32(c). The reason the shapes of those two response curves look the same is because their shapes are the same. If our DFT input sequence was a complex sinusoid of k = 0 cycles, i.e., a sequence of identical constant values, the ratio of sines term in Eq. (3-64) becomes
which is identical to the all ones form of the Dirichlet kernel in Eq. (3-48). The shape of our Xc(m) DFT response is the sinc function of the Dirichlet kernel.
Table 3-3. Various Forms of the Amplitude Response of the DFT to a Complex Input Sinusoid Having k Cycles in the Sample Interval
Description | Expression |
|---|---|
Complex input DFT amplitude response in terms of the integral frequency variable m [From Eq. (3-64)] | |
Alternate form of the complex input DFT amplitude response in terms of the integral frequency variable m [based on Eq. (3-49)] | |
Amplitude normalized complex input DFT response in terms of the integral frequency variable m | |
Complex input DFT response in terms of the sample rate fs in Hz | |
Amplitude normalized complex input DFT response in terms of the sample rate fs in Hz | |
Amplitude normalized complex input DFT response in terms of the sample rate ωs |
Now that we know what the DFT frequency response is to a complex sinusoidal input, it's easy to determine the DFT frequency response to a real input sequence. Say we want the DFT's response to a real cosine sequence, like that shown in Figure 3-40(a), expressed as
where k is the integral number of complete cycles occurring in the N samples. Remembering Euler's relationship cos(ø) = (ejø + e–jø)/2, we can show the desired DFT as Xr(m) where

Fortunately, in the previous section we just finished determining the closed form of a summation expression like those in Eq. (3-72), so we can write the closed form for Xr(m) as

We show the magnitude of those two ratio of sines terms as the sinc functions in Figure 3-43. Here again, the DFT is sampling the input cosine sequence's continuous spectrum and, because k = m, only one DFT bin is nonzero. Because the DFT's input sequence is real, Xr(m) has both positive and negative frequency components. The positive frequency portion of Figure 3-43 corresponds to the first ratio of sines term in Eq. (3-73) and the second ratio of sines term in Eq. (3-73) produces the negative frequency components of Xr(m).
Figure 3-43. N-point DFT frequency magnitude response to a real cosine having integral k cycles in the N-point time sequence xr(n) = cos(2πnk/N).
DFT leakage is again demonstrated if our input sequence frequency were shifted from the center of the kth bin to k+0.25 as shown in Figure 3-44. (We used this concept of real input DFT amplitude response to introduce the effects of DFT leakage in Section 3.8.)
Figure 3-44. N-point DFT frequency magnitude response showing spectral leakage of a real cosine having k+0.25 cycles in the N-point time sequence xr(n).
In Table 3-4, the various mathematical expressions for the (positive frequency) amplitude response of the DFT to a real cosine input sequence are simply those expressions in Table 3-3 reduced in amplitude by a factor of 2.
Now that we understand the DFT's overall N-point (or N-bin) frequency response to a real cosine of k cycles per sample interval, we conclude this chapter by determining the frequency response of a single DFT bin. We can think of a single DFT bin as a kind of bandpass filter, and this useful notion is used, for example, to describe DFT scalloping loss (Section 3.10), employed in the design of frequency-domain filter banks, and applied in a telephone frequency multiplexing technique known as transmultiplexing[15]. To determine a DFT single-bin's frequency response, consider applying a real xr(n) cosine sequence to a DFT and monitoring the output magnitude of just the m = k bin. Let's say the initial frequency of the input cosine sequence starts at a frequency of k<m cycles and increases up to a frequency of k>m cycles in the sample interval. If we measure the DFT's m = k bin during that frequency sweep, we'll see that its output magnitude must track the input cosine sequence's continuous spectrum, shown as the shaded curves in Figure 3-45.
Figure 3-45. Determining the output magnitude of the mth bin of an N-point DFT: (a) when the real xr(n) has k = m–2.5 cycles in the time sequence; (b) when the real xr(n) has k = m–1.5 cycles in the time sequence; (c) when the real xr(n) has k = m cycles in the time sequence; (d) the DFT single-bin frequency magnitude response of the m = k bin.
Table 3-4. Various Forms of the Positive Frequency Amplitude Response of the DFT to a Real Cosine Input Having k Cycles in the Sample Interval
Description | Expression |
|---|---|
Real input DFT amplitude response in terms of the integral frequency variable m [From Eq. (3-73)] | |
Alternate form of the real input DFT amplitude response in terms of the integral frequency variable m [based on Eq. (3-49)] | |
Amplitude normalized real input DFT response in terms of the integral frequency variable m | |
Real input DFT response in terms of the sample rate fs in Hz | |
Amplitude normalized real input DFT response in terms of the sample rate fs in Hz | |
Amplitude normalized real input DFT response in terms of the sample rate ωs in radians/s |
Figure 3-45(a) shows the m = k bin's output when the input xr(n)'s frequency is k = m–2.5 cycles per sample interval. Increasing xr(n)'s frequency to k = m–1.5 cycles per sample interval results in the m = k bin's output, shown in Figure 3-45(b). Continuing to sweep xr(n)'s frequency higher, Figure 3-45(c) shows the m = k bin's output when the input frequency is k = m. Throughout our input frequency sweeping exercise, we can see that the m = k bin's output magnitude must trace out the cosine sequence's continuous spectrum, shown by the solid curve in Figure 3-45(d). This means that a DFT's single-bin frequency magnitude response, to a real input sinusoid, is that solid sinc function curve defined by Eqs. (3-74) through (3-79).
Now that we've learned about the DFT, it's appropriate to ensure we understand what the DFT actually represents, and avoid a common misconception regarding its behavior. In the literature of DSP you'll encounter the topics of continuous Fourier transform, Fourier series, discrete-time Fourier transform, discrete Fourier transform, and periodic spectra. It takes effort to keep all those notions clear in your mind, especially when you read or hear someone say something like “the DFT assumes its input sequence is periodic in time.” (You wonder how this can be true because it's easy to take the DFT of an aperiodic time sequence.) That remark is misleading at best because DFTs don't make assumptions. What follows is how I keep the time and frequency periodicity nature of discrete sequences straight in my mind.
Consider an infinite-length continuous time signal containing a single finite-width pulse shown in Figure 3-46(a). The magnitude of its continuous Fourier transform (CFT) is the continuous frequency-domain function X1(ω). If the single pulse can be described algebraically (with an equation), then the CFT function X1(ω), also an equation, can be found using Fourier transform calculus. (Chances are very good you actually did this as a homework, or test, problem.) The continuous frequency variable ω is radians per second. If the CFT was performed on the infinite-length signal of periodic pulses in Figure 3-46(b), the result would be the line spectra known as the Fourier series X2(ω). Those spectral lines (impulses) are infinitely narrow and X2(ω) is well-defined in between those lines, because X2(ω) is continuous. (A well known example of this concept is the CFT of a continuous squarewave, which yields a Fourier series whose frequencies are all the odd-multiples of the squarewave's fundamental frequency.)
Figure 3-46. Time domain signals and sequences, and the magnitudes of their transforms in the frequency domain.
Figure 3-46(b) is an example of a continuous periodic function (in time) having a spectrum that's a series of discrete spectral components. You're welcome to think of the X2(ω) Fourier series as a sampled version of the continuous spectrum in Figure 3-46(a). The time-frequency relationship between x2(t) and X2(ω) shows how a periodic function in one domain (time) leads to a function in the other domain (frequency) that is discrete in nature.
Next, consider the infinite-length discrete time sequence x(n), containing several non-zero samples, in Figure 3-46(c). We can perform a CFT of x(n) describing its spectrum as a continuous frequency-domain function X3(ω). This continuous spectrum is called a discrete-time Fourier transform (DTFT) defined by [see p. 48 of Reference 16]

To illustrate the notion of the DTFT, let's say we had a time sequence defined as xo(n) = (0.75)n for n ≥ 0. Its DTFT would be

Equation (3-81) is a geometric series (see Appendix B) and can be evaluated as
Xo(ω) is continuous and periodic with a period of 2π, whose magnitude shown in Figure 3-47. This is an example of a sampled (or discrete) time-domain sequence having a periodic spectrum. For the curious reader, we can verify the 2π periodicity of the DTFT using an integer k in the following:

because e–j2πkn = 1 for integer values of k.
X3(ω) in Figure 3-46(c) also has a 2π periodicity represented by ωs = 2πfs, where the cyclic frequency fs is the reciprocal of the time period between the x(n) samples. The continuous periodic spectral function X3(ω) is what we'd like to be able to compute in our world of DSP, but we can't. We're using computers and, sadly, we can't perform continuous signal analysis with the discrete (binary number) nature of computers. All of our processing comprises discrete numbers stored in our computer's memory and, as such, all of our time-domain signals and all of our frequency-domain spectra are discrete sampled sequences. Consequently the CFT, or inverse CFT, of the sequences with which we work will all be periodic.
The transforms indicated in Figure 3-46(a) through (c) are pencil-and-paper mathematics of calculus. In a computer, using only finite-length discrete sequences, we can only approximate the CFT (the DTFT) of the infinite-length x(n) time sequence in Figure 3-46(c). That approximation is called the discrete Fourier transform (DFT), and it's the only DSP Fourier tool we have available to us. Taking the DFT of x1(n), where x1(n) is a finite-length portion of x(n), we obtain the discrete periodic X1(m) spectral samples in Figure 3-46(d). Notice how X1(m) is a sampled version of the continuous periodic X3(ω). However, X1(m) is exactly equal to the CFT of the periodic time sequence x2(n) in Figure 3-46(d). So when someone says “the DFT assumes its input sequence is periodic in time” what they really mean is the DFT is equal to the continuous Fourier transform (called the DTFT) of a periodic time- domain discrete sequence. After all this rigamarole, the end of the story is this: if a function is periodic, its forward/inverse DTFT will be discrete; if a function is discrete, its forward/inverse DTFT will be periodic.
[†] Fourier is pronounced 'for-yā. In engineering school, we called Eq. (3-1) the “four-year” transform because it took about four years to do one homework problem.
[1] Instead of the letter j, be aware that mathematicians often use the letter i to represent the ![]() operator.
operator.
[†] In the literature, the equations for window functions depend on the range of the sample index n. We define n to be in the range 0 < n < N–1. Some authors define n to be in the range –N/2 < n < N/2, in which case, for example, the expression for the Hanning window would have a sign change and be w(n) = 0.5 + 0.5cos(2πn/N–1).
[†] Perhaps Figure 3-19(a) is why individual DFT outputs are called “bins.” Any signal energy under a sin(x)/x curve will show up in the enclosed storage compartment of that DFT's output sample.
[†] Notice that the DFT sizes (N) we've discussed are powers of 2 (64, 128, 256, 512). That's because we actually perform DFTs using a special algorithm known as the fast Fourier transform (FFT). As we'll see in Chapter 4, the typical implementation of the FFT requires that N be a power of 2.
[†] The curves would be shifted downward, indicating a lower SNR, because leakage would raise the average noise-power level, and scalloping loss would reduce the DFT bin's output power level.
[†] N was an even number in Figure 3-24 depicting the x(n). Had N been an odd number, the limits on the summation in Eq. (3-35) would have been –(N–1)/2 ≤ n ≤ (N–1)/2. Using these alternate limits would have led us to exactly the same X(m) as in Eq. (3-43).
[††] L'Hopital is pronounced 'lō-pē-t![]() l, like baby doll.
l, like baby doll.
[†] This is a fundamental characteristic of Fourier transforms. The narrower the function in one domain, the wider its transform will be in the other domain.
[†] The particular pattern of +π and –π values in Figure 3-29(e) is an artifact of the software used to generate that figure. A different software package may show a different pattern, but as long as the nonzero phase samples are either +π or –π, the phase results will be correct.
[1] By the way, there's nothing official about calling Eq. (3-48) a Type 1 Dirichlet kernel. We're using the phrase Type 1 merely to distinguish Eq. (3-48) from other mathematical expressions for the Dirichlet kernel that we're about to encounter.
[†] We can be comfortable with this result because, if we let K = N, we'll see that the peak value of X(m) in Eq. (3-49), for m = 0, is equal to N, which agrees with Eq. (3-44).
[1] Just as we used L'Hopital's rule to find the peak value of the Dirichlet kernel in Eq. (3-44), we could also evaluate Eq. (3-64) to show that the peak of Xc(m) is N when m = k.