11
MEMORY ARCHITECTURE AND ORGANIZATION
This chapter discusses memory hierarchy—the different types and performance levels of memory found in computer systems. Although programmers often treat all forms of memory as though they are equivalent, using memory improperly can have a negative impact on performance. In this chapter you’ll see how to make the best use of the memory hierarchy within your programs.
11.1 The Memory Hierarchy
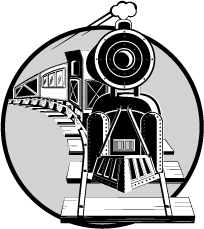
Most modern programs benefit by having a large amount of very fast memory. Unfortunately, as a memory device gets larger, it tends to be slower. For example, cache memories are very fast, but they are also small and expensive. Main memory is inexpensive and large, but it is slow, requiring wait states. The memory hierarchy provides a way to compare the cost and performance of different types of memory. Figure 11-1 shows one variant of the memory hierarchy.
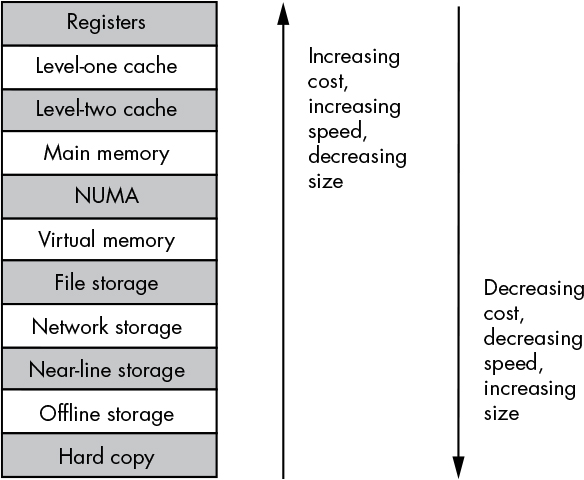
Figure 11-1: The memory hierarchy
At the top level of the memory hierarchy are the CPU’s general-purpose registers. Registers provide the fastest access to data possible on the CPU. The register file is also the smallest memory object in the hierarchy (for example, the 32-bit 80x86 has just eight general-purpose registers, and the x86-64 variants have up to 16 general-purpose registers). Because it is impossible to add more registers to a CPU, they are also the most expensive memory locations. Even if we count the FPU, MMX/AltiVec/Neon, SSE/SIMD, AVX/2/-512, and other CPU registers in this portion of the memory hierarchy, it does not change the fact that CPUs have a very limited number of registers, and the cost per byte of register memory is quite high.
Working our way down, the level-one (L1) cache system is the next highest performance subsystem in the memory hierarchy. As with registers, the CPU manufacturer usually provides the L1 cache on the chip, and you cannot expand it. Its size is usually small, typically between 4KB and 32KB, though this is much larger than the register memory available on the CPU chip. Although the L1 cache size is fixed on the CPU, the cost per cache byte is much lower than the cost per register byte, because the cache contains more storage than is available in all the registers combined, and the system designer’s cost for both memory types equals the price of the CPU.
Level-two (L2) cache is present on some CPUs, but not all. For example, Intel i3, i5, i7, and i9 CPUs include an L2 cache as part of their package, but some of Intel’s older Celeron chips do not. The L2 cache is generally much larger than the L1 cache (for example, 256KB to 1MB as compared with 4KB to 32KB). On CPUs with a built-in L2 cache, the cache is not expandable. It still costs less than the L1 cache, because we amortize the cost of the CPU across all the bytes in the two caches, and the L2 cache is larger.
Level-three (L3) cache is present on all but the oldest Intel processors. The L3 cache is larger still than the L2 cache (typically 8MB on later Intel chips).
The main-memory subsystem comes below the L3 (or L2, if there is no L3) cache system in the memory hierarchy. Main memory is the general-purpose, relatively low-cost memory—typically DRAM or something similarly inexpensive—found in most computer systems. However, there are many differences in main-memory technology that result in variations in speed. The main-memory types include standard DRAM, synchronous DRAM (SDRAM), double data rate DRAM (DDRAM), DDR3, DDR4, and so on. Generally, you won’t find a mixture of these technologies in the same computer system.
Below main memory is the NUMA memory subsystem. NUMA, which stands for Non-Uniform Memory Access, is a bit of a misnomer. The term implies that different types of memory have different access times, which describes the entire memory hierarchy; in Figure 11-1, however, it refers to blocks of memory that are electronically similar to main memory but, for one reason or another, operate significantly slower. A good example of NUMA is the memory on a video (or graphics) card. Another example is flash memory, which has significantly slower access and transfer times than standard semiconductor RAM. Other peripheral devices that provide a block of memory to be shared between the CPU and the peripheral usually have slow access times as well.
Most modern computer systems implement a virtual memory scheme that simulates main memory using a mass storage disk drive. A virtual memory subsystem is responsible for transparently copying data between the disk and main memory as programs need it. While disks are significantly slower than main memory, the cost per bit is also three orders of magnitude lower for disks. Therefore, it’s far less expensive to keep data on magnetic storage or on a solid-state drive (SSD) than in main memory.
File storage memory also uses disk media to store program data. However, whereas the virtual memory subsystem is responsible for transferring data between disk (or SSD) and main memory as programs require, it is the program’s responsibility to store and retrieve file storage data. In many instances, it’s a bit slower to use file storage memory than it is to use virtual memory, which is why file storage memory is lower in the memory hierarchy.1
Next comes network storage. At this level in the memory hierarchy, programs keep data on a different memory system that connects to the computer system via a network. Network storage can be virtual memory, file storage memory, or distributed shared memory (DSM), where processes running on different computer systems share data stored in a common block of memory and communicate changes to that block across the network.
Virtual memory, file storage, and network storage are examples of online memory subsystems. Memory access within these memory subsystems is slower than accessing main memory. However, when a program requests data from one of these three online memory subsystems, the memory device will respond to the request as quickly as its hardware allows. This is not true for the remaining levels in the memory hierarchy.
The near-line and offline storage subsystems may not be ready to respond immediately to a program’s request for data. An offline storage system keeps its data in electronic form (usually magnetic or optical) but on storage media that are not necessarily connected to the computer system that needs the data. Examples of offline storage include magnetic tapes, unattached external disk drives, disk cartridges, optical disks, USB memory sticks, SD cards, and floppy diskettes. When a program needs to access data stored offline, it must stop and wait for someone or something to mount the appropriate media on the computer system. This delay can be quite long (perhaps the computer operator decided to take a coffee break?).
Near-line storage uses the same types of media as offline storage, but rather than requiring an external source to mount the media before its data is available for access, the near-line storage system holds the media in a special robotic jukebox device that can automatically mount the desired media when a program requests it.
Hardcopy storage is simply a printout, in one form or another, of data. If a program requests some data, and that data exists only in hardcopy form, someone will have to manually enter the data into the computer. Paper or other hardcopy media is probably the least expensive form of memory, at least for certain data types.
11.2 How the Memory Hierarchy Operates
The whole point of the memory hierarchy is to allow reasonably fast access to a large amount of memory. If only a little memory were necessary, we’d use fast static RAM (the circuitry that cache memory uses) for everything. If speed wasn’t an issue, we’d use virtual memory for everything. The memory hierarchy enables us to take advantage of the principles of spatial locality of reference and temporality of reference to move frequently referenced data into fast memory and leave rarely referenced data in slower memory. Unfortunately, during the course of a program’s execution, the sets of oft-used and seldom-used data change. We can’t simply distribute our data throughout the various levels of the memory hierarchy when the program starts and then leave the data alone as the program executes. Instead, the different memory subsystems need to be able to accommodate changes in spatial locality or temporality of reference during the program’s execution by dynamically moving data between subsystems.
Moving data between the registers and memory is strictly a program function. The program loads data into registers and stores register data into memory using machine instructions like mov. It is the programmer’s or compiler’s responsibility to keep heavily referenced data in the registers as long as possible; the CPU will not automatically place data in general-purpose registers in order to achieve higher performance.
Programs explicitly control access to registers, main memory, and those memory-hierarchy subsystems only at the file storage level and below. Programs are largely unaware of the memory hierarchy between the register level and main memory. In particular, cache access and virtual memory operations are generally transparent to the program; that is, access to these levels of the memory hierarchy usually occurs without any intervention on a program’s part. Programs simply access main memory, and the hardware and operating system take care of the rest.
Of course, if a program always accesses main memory, it will run slowly, because modern DRAM main-memory subsystems are much slower than the CPU. The job of the cache memory subsystems and of the CPU’s cache controller is to move data between main memory and the L1, L2, and L3 caches so that the CPU can quickly access oft-requested data. Likewise, it is the virtual memory subsystem’s responsibility to move oft-requested data from hard disk to main memory (if even faster access is needed, the caching subsystem will then move the data from main memory to cache).
With few exceptions, most memory subsystem accesses take place transparently between one level of the memory hierarchy and the level immediately below or above it. For example, the CPU rarely accesses main memory directly. Instead, when the CPU requests data from memory, the L1 cache subsystem takes over. If the requested data is in the cache, the L1 cache subsystem returns the data to the CPU, and that concludes the memory access. If the requested data isn’t present in the L1 cache, the L1 cache subsystem passes the request down to the L2 cache subsystem. If the L2 cache subsystem has the data, it returns this data to the L1 cache, which then returns the data to the CPU. Requests for the same data in the near future will be fulfilled by the L1 cache rather than the L2 cache, because the L1 cache now has a copy of the data. After the L2 cache, the L3 cache kicks in.
If none of the L1, L2, or L3 cache subsystems have a copy of the data, the request goes to main memory. If the data is found in main memory, the main-memory subsystem passes it to the L3 cache, which then passes it to the L2 cache, which then passes it to the L1 cache, which then passes it to the CPU. Once again, the data is now in the L1 cache, so any requests for this data in the near future will be fulfilled by the L1 cache.
If the data is not present in main memory but exists in virtual memory on some storage device, the operating system takes over, reads the data from disk or some other device (such as a network storage server), and passes the data to the main-memory subsystem. Main memory then passes the data through the caches to the CPU as previously described.
Because of spatial locality and temporality, the largest percentage of memory accesses takes place in the L1 cache subsystem. The next largest percentage of accesses takes place in the L2 cache subsystem. After that, the L3 cache system handles most accesses. The most infrequent accesses take place in virtual memory.
11.3 Relative Performance of Memory Subsystems
Looking again at Figure 11-1, notice that the speed of the various memory hierarchy levels increases as you go up. Exactly how much faster is each successive level in the memory hierarchy? The short answer is that the speed gradient isn’t uniform. The speed difference between any two contiguous levels ranges from “almost no difference” to “four orders of magnitude.”
Registers are, unquestionably, the best place to store data you need to access quickly. Accessing a register never requires any extra time, and most machine instructions that access data can access register data. Furthermore, instructions that access memory often require extra bytes (displacement bytes) as part of the instruction encoding. This makes instructions longer and, often, slower.
Intel’s instruction timing tables for the 80x86 claim that an instruction like mov(someVar, ecx); should run as fast as an instruction like mov(ebx, ecx);. However, if you read the fine print, you’ll find that Intel makes this claim based on several assumptions about the former instruction. First, it assumes that someVar’s value is present in the L1 cache memory. If it is not, the cache controller has to look in the L2 cache, in the L3 cache, in main memory, or, worse, on disk in the virtual memory subsystem. All of a sudden, an instruction that should execute in 0.25 nanoseconds on a 4 GHz processor (that is, in one clock cycle) requires several milliseconds to execute. That’s a difference of over six orders of magnitude. It’s true that future accesses of this variable will take place in just one clock cycle because it will subsequently be stored in the L1 cache. But even if you access someVar’s value one million times while it’s still in the cache, the average time of each access will still be about two cycles because of how long it takes to access someVar the very first time.
Granted, the likelihood that some variable will be located on disk in the virtual memory subsystem is quite low. However, there’s still a difference in performance of a couple orders of magnitude between the L1 cache subsystem and the main-memory subsystem. Therefore, if the program has to retrieve the data from main memory, 999 memory accesses later, you’re still paying an average cost of two clock cycles to access data that Intel’s documentation claims should take one cycle.
The difference in speed between the L1, L2, and L3 cache systems isn’t so dramatic unless the secondary or tertiary cache is not packaged together on the CPU. On a 4 GHz processor, the L1 cache must respond within 0.25 nanoseconds if the cache operates with zero wait states (some processors actually introduce wait states in L1 cache accesses, but CPU designers try to avoid this). Accessing data in the L2 cache is always slower than in the L1 cache, and always includes the equivalent of at least one wait state, and probably more.
There are several reasons why L2 cache accesses are slower than L1 accesses. First, it takes the CPU time to determine that the data it’s seeking is not in the L1 cache. By the time it does that, the memory access cycle is nearly complete, and there’s no time to access the data in the L2 cache. Secondly, the circuitry of the L2 cache may be slower than the circuitry of the L1 cache in order to make the L2 cache less expensive. Third, L2 caches are usually 16 to 64 times larger than L1 caches, and larger memory subsystems tend to be slower than smaller ones. All this amounts to additional wait states for accessing data in the L2 cache. As noted earlier, the L2 cache can be as much as one order of magnitude slower than the L1 cache. The same situation occurs when you have to access data in the L3 cache.
The L1, L2, and L3 caches also differ in the amount of data the system fetches when there is a cache miss (see Chapter 6). When the CPU fetches data from or writes data to the L1 cache, it generally fetches or writes only the data requested. If you execute a mov(al, memory); instruction, the CPU writes only a single byte to the cache. Likewise, if you execute the mov(mem32, eax); instruction, the CPU reads exactly 32 bits from the L1 cache. However, access to memory subsystems below the L1 cache does not work in small chunks like this. Usually, memory subsystems move blocks of data, or cache lines, whenever accessing lower levels of the memory hierarchy. For example, if you execute the mov(mem32, eax); instruction, and mem32’s value is not in the L1 cache, the cache controller doesn’t simply read mem32’s 32 bits from the L2 cache, assuming that it’s present there. Instead, the cache controller will actually read a whole block of bytes (generally 16, 32, or 64 bytes, depending on the particular processor) from the L2 cache. The hope is that the program exhibits spatial locality so that reading a block of bytes will speed up future accesses to adjacent objects in memory. Unfortunately, the mov(mem32, eax); instruction doesn’t complete until the L1 cache reads the entire cache line from the L2 cache. This excess time is known as latency. If the program does not access memory objects adjacent to mem32 in the future, this latency is lost time.
A similar performance gulf separates the L2 and L3 caches and L3 and main memory. Main memory is typically one order of magnitude slower than the L3 cache; L3 accesses are much slower than L2 access. To speed up access to adjacent memory objects, the L3 cache reads data from main memory in cache lines. Likewise, L2 cache reads cache lines from L3.
Standard DRAM is two to three orders of magnitude faster than SSD storage (which is an order of magnitude faster than hard drives, which is why hard disks often have their own DRAM-based caches). To overcome this, there’s usually a difference of two to three orders of magnitude in size between the L3 cache and the main memory so that the difference in speed between disk and main memory matches that between the main memory and the L3 cache. (Balancing performance characteristics in the memory hierarchy is a goal to strive for in order to effectively use the different types of memory.)
We won’t consider the performance of the other memory-hierarchy subsystems in this chapter, as they are more or less under programmer control. Because their access is not automatic, very little can be said about how frequently a program will access them. However, in Chapter 12 we’ll look at some considerations for these storage devices.
11.4 Cache Architecture
Up to this point, we have treated the cache as a magical place that automatically stores data when we need it, perhaps fetching new data as the CPU requires it. But how exactly does the cache do this? And what happens when it is full and the CPU is requesting additional data that’s not there? In this section, we’ll look at the internal cache organization and try to answer these two questions, along with a few others.
Programs access only a small amount of data at a given time, and a cache that is sized accordingly will improve their performance. Unfortunately, the data that programs want rarely sits in contiguous memory locations—it’s usually spread out all over the address space. Therefore, cache design has to account for the fact that the cache must map data objects at widely varying addresses in memory.
As noted in the previous section, cache memory is not organized in a single group of bytes. Instead, it’s usually organized in blocks of cache lines, with each line containing some number of bytes (typically a small power of 2 like 16, 32, or 64), as shown in Figure 11-2.
Figure 11-2: Possible organization of an 8KB cache
We can attach a different noncontiguous address to each of the cache lines. Cache line 0 might correspond to addresses $10000 through $1000F, and cache line 1 might correspond to addresses $21400 through $2140F. Generally, if a cache line is n bytes long, it will hold n bytes from main memory that fall on an n-byte boundary. In the example in Figure 11-2, the cache lines are 16 bytes long, so a cache line holds blocks of 16 bytes whose addresses fall on 16-byte boundaries in main memory (in other words, the LO 4 bits of the address of the first byte in the cache line are always 0).
When the cache controller reads a cache line from a lower level in the memory hierarchy, where does the data go in the cache? The answer is determined by the caching scheme in use. There are three different caching schemes: direct-mapped cache, fully associative cache, and n-way set associative cache.
11.4.1 Direct-Mapped Cache
In a direct-mapped cache (also known as the one-way set associative cache), a particular block of main memory is always loaded into—mapped to—the exact same cache line, determined by a small number of bits in the data block’s memory address. Figure 11-3 shows how a cache controller could select the appropriate cache line for an 8KB cache with 512 16-byte cache lines and a 32-bit main-memory address.
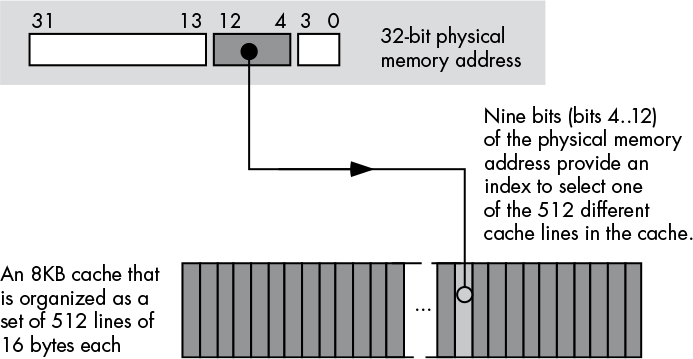
Figure 11-3: Selecting a cache line in a direct-mapped cache
A cache with 512 cache lines requires 9 bits to select one of the cache lines (29 = 512). In this example, bits 4 through 12 of the address determine which cache line to use (assuming we number the cache lines from 0 to 511), while bits 0 through 3 determine the particular byte within the 16-byte cache line.
The direct-mapped caching scheme is very easy to implement. Extracting 9 (or some other number of) bits from the memory address and using the result as an index into the array of cache lines is trivial and fast, though this design may not make effective use of all the cache memory.
For example, the caching scheme in Figure 11-3 maps address 0 to cache line 0. It also maps addresses $2000 (8KB), $4000 (16KB), $6000 (24KB), $8000 (32KB), and every other address that is a multiple of 8 kilobytes to cache line 0. This means that if a program is constantly accessing data at addresses that are multiples of 8KB and not accessing any other locations, the system will use only cache line 0, leaving all the other cache lines unused. In this extreme case, the cache is effectively limited to the size of one cache line, and each time the CPU requests data at an address that is mapped to, but not present in, cache line 0, it has to go down to a lower level in the memory hierarchy to access that data.
11.4.2 Fully Associative Cache
In a fully associative cache subsystem, the cache controller can place a block of bytes in any one of the cache lines present in the cache memory. While this is the most flexible cache system, the extra circuitry to achieve full associativity is expensive and, worse, can slow down the memory subsystem. Most L1 and L2 caches are not fully associative for this reason.
11.4.3 n-Way Set Associative Cache
If a fully associative cache is too complex, too slow, and too expensive to implement, but a direct-mapped cache is too inefficient, an n-way set associative cache is a compromise between the two. In an n-way set associative cache, the cache is broken up into sets of n cache lines. The CPU determines the particular set to use based on some subset of the memory address bits, just as in the direct-mapping scheme, and the cache controller uses a fully associative mapping algorithm to determine which one of the n cache lines within the set to use.
For example, an 8KB two-way set associative cache subsystem with 16-byte cache lines organizes the cache into 256 cache-line sets with two cache lines each. Eight bits from the memory address determine which one of these 256 different sets will contain the data. Once the cache-line set is determined, the cache controller maps the block of bytes to one of the two cache lines within the set (see Figure 11-4). This means two different memory addresses located on 8KB boundaries (addresses having the same value in bits 4 through 11) can both appear simultaneously in the cache. However, a conflict will occur if you attempt to access a third memory location at an address that is an even multiple of 8KB.

Figure 11-4: A two-way set associative cache
A four-way set associative cache puts four associative cache lines in each cache-line set. In an 8KB cache like the one in Figure 11-4, a four-way set associative caching scheme would have 128 cache-line sets with four cache lines each. This would allow the cache to maintain up to four different blocks of data without a conflict, each of which would map to the same cache line in a direct-mapped cache.
A two- or four-way set associative cache is much better than a direct-mapped cache and considerably less complex than a fully associative cache. The more cache lines we have in each cache-line set, the closer we come to creating a fully associative cache, with all the attendant problems of complexity and speed. Most cache designs are direct-mapped, two-way set associative, or four-way set associative. The various members of the 80x86 family make use of all three.
Matching the Caching Scheme to the Access Type
Despite its downsides, the direct-mapped cache is, in fact, very effective for data that you access sequentially rather than randomly. Because the CPU typically executes machine instructions sequentially, instruction bytes can be stored very effectively in a direct-mapped cache. However, programs tend to access data more randomly than they access code, so data is better stored in a twoway or four-way set associative cache.
Because of these different access patterns, many CPU designers use separate caches for data and machine instruction bytes—for example, an 8KB data cache and an 8KB instruction cache rather than a single 16KB unified cache. The advantage of this approach is that each cache can use the caching scheme that‛s most appropriate for the particular values it will store. The drawback is that the two caches are now each half the size of a unified cache, which may cause more cache misses than would occur with a unified cache. The choice of an appropriate cache organization is a difficult one, beyond the scope of this book, and can be made only after you‛ve analyzed many programs running on the target processor.
11.4.4 Cache-Line Replacement Policies
Thus far, we’ve answered the question, “Where do we put a block of data in the cache?” Now we turn to the equally important question, “What happens if a cache line isn’t available when we want to put a block of data in it?”
For a direct-mapped cache architecture, the cache controller simply replaces whatever data was formerly in the cache line with the new data. Any subsequent reference to the old data will result in a cache miss, and the cache controller will have to restore that old data to the cache by replacing whatever data is in that line.
For a two-way set associative cache, the replacement algorithm is a bit more complex. As you’ve seen, whenever the CPU references a memory location, the cache controller uses some subset of the address’s bits to determine the cache-line set that should be used to store the data. Then, using some fancy circuitry, the cache controller determines whether the data is already present in one of the two cache lines in the destination set. If the data isn’t there, the CPU has to retrieve it from memory, and the controller has to pick one of the two lines to use. If either or both of the cache lines are currently unused, the controller picks an unused line. However, if both cache lines are currently in use, the controller must pick one of them and replace its data with the new data.
The controller cannot predict the cache line whose data will be referenced first and replace the other cache line, but it can use the principle of temporality: if a memory location has been referenced recently, it’s likely to be referenced again in the very near future. This implies the following corollary: if a memory location hasn’t been accessed in a while, it’s likely to be a long time before the CPU accesses it again. Therefore, many cache controllers use the least recently used (LRU) algorithm.
An LRU policy is easy to implement in a two-way set associative cache system, using a single bit for each set of two cache lines. Whenever the CPU accesses one of the two cache lines this bit is set to 0, and whenever the CPU accesses the other cache line, this bit is set to 1. Then, when a replacement is necessary, the cache controller replaces the LRU cache line, indicated by the inverse of this bit.
For four-way (and greater) set associative caches, maintaining the LRU information is a bit more difficult, which is one reason the circuitry for such caches is more complex. Because of the complications LRU might introduce, other replacement policies are sometimes used instead. Two of them, first-in, first-out (FIFO) and random, are easier to implement than LRU, but they have their own problems. A full discussion of their pros and cons is beyond the scope of this book, but you can find more information in a text on computer architecture or operating systems.
11.4.5 Cache Write Policies
What happens when the CPU writes data to memory? The simple answer, and the one that results in the quickest operation, is that the CPU writes the data to the cache. However, what happens when the cache-line data is subsequently replaced by data that is read from memory? If the modified contents of the cache line are not written to main memory, they will be lost. The next time the CPU attempts to access that data, it will reload the cache line with the old data.
Clearly, any data written to the cache must ultimately be written to main memory as well. Caches use two common write policies: write-through and write-back.
The write-through policy states that any time data is written to the cache, the cache immediately turns around and writes a copy of that cache line to main memory. The CPU does not have to halt while the cache controller writes the data from cache to main memory. So, unless the CPU needs to access main memory shortly after the write occurs, this operation takes place in parallel with the program’s execution. Because the write-through policy updates main memory with the new value as soon as possible, it is a better policy to use when two different CPUs are communicating through shared memory.
Still, a write operation takes some time, during which it’s likely that a CPU will want to access main memory, so this policy may not be a high-performance solution. Worse, suppose the CPU reads from and writes to the memory location several times in succession. With a write-through policy in place, the CPU will saturate the bus with cache-line writes, and this will significantly hamper the program’s performance.
With the write-back policy, writes to the cache are not immediately written to main memory; instead, the cache controller updates main memory later. This scheme tends to be higher performance, because several writes to the same cache line within a short time period won’t generate multiple writes to main memory.
To determine which cache lines must be written back to main memory, the cache controller usually maintains a dirty bit within each one. The cache system sets this bit whenever it writes data to the cache. At some later time, the cache controller checks the dirty bit to determine if it must write the cache line to memory. For example, whenever the cache controller replaces a cache line with other data from memory, it first checks the dirty bit, and if that bit is set, the controller writes that cache line to memory before going through with the cache-line replacement. Note that this increases the latency time during a cache-line replacement. This latency could be reduced if the cache controller were able to write dirty cache lines to main memory while no other bus access was occurring. Some systems provide this functionality, and others do not for economic reasons.
11.4.6 Cache Use and Software
A cache subsystem is not a panacea for slow memory access, and can in fact actually hurt an application’s performance. In order for a cache system to be effective, software must be written with the cache behavior in mind. Particularly, good software must exhibit either spatial or temporal locality of reference—which the software designer accomplishes by placing oft-used variables adjacent in memory so they tend to fall into the same cache lines—and avoid data structures and access patterns that force the cache to frequently replace cache lines.
Suppose that an application accesses data at several different addresses that the cache controller would map to the same cache line. With each access, the cache controller must read in a new cache line (possibly flushing the old one back to memory if it is dirty). As a result, each memory access incurs the latency cost of retrieving a cache line from main memory. This degenerate case, known as thrashing, can slow down the program by one to two orders of magnitude, depending on the speed of main memory and the size of a cache line. We’ll take another look at thrashing a little later in this chapter.
A benefit of the cache subsystem on modern 80x86 CPUs is that it automatically handles many misaligned data references. Remember, there’s a performance penalty for accessing words or double-word objects at an address that is not an even multiple of that object’s size. By providing some fancy logic, Intel’s designers have eliminated this penalty as long as the data object is located completely within a cache line. However, if the object crosses a cache line, the penalty still applies.
11.5 NUMA and Peripheral Devices
Although most of the RAM in a system is based on high-speed DRAM interfaced directly with the processor’s bus, not all memory is connected to the CPU this way. Sometimes a large block of RAM is part of a peripheral device—for example, a video card, network interface card, or USB controller—and you communicate with that device by writing data to its RAM. Unfortunately, the access time to the RAM on these peripheral devices is often much slower than the access time to main memory. In this section, we’ll use the video card as an example, although NUMA performance applies to other devices and memory technologies as well.
A typical video card interfaces with a CPU through a Peripheral Component Interconnect Express (PCI-e) bus inside the computer system. Though 16-lane PCI-e buses are fast, memory access is still much faster. Game programmers long ago discovered that manipulating a copy of the screen data in main memory and writing that data to the video card RAM only periodically (typically once every 1/60 of a second during video retrace, to avoid flicker) is much faster than writing directly to the video card every time you want to make a change.
Caches and the virtual memory subsystem operate transparently (that is, applications are unaware of the underlying operations taking place), but NUMA memory does not, so programs that write to NUMA devices must minimize the number of accesses whenever possible (for example, by using an offscreen bitmap to hold temporary results). If you’re actually storing and retrieving data on a NUMA device, like a flash memory card, you must explicitly cache the data yourself.
11.6 Virtual Memory, Memory Protection, and Paging
In a modern operating system such as Android, iOS, Linux, macOS, or Windows, it is very common to have several different programs running concurrently in memory. This presents several problems:
- How do you keep the programs from interfering with one another’s memory?
- If two programs both expect to load a value into memory at address $1000, how can you load both values and execute both programs at the same time?
- What happens if the computer has 64GB of memory, and you decide to load and execute three different applications, two of which require 32GB and one that requires 16GB (not to mention the memory that the OS requires for its own purposes)?
The answers to all these questions lie in the virtual memory subsystem that modern processors support.
Virtual memory on CPUs such as the 80x86 gives each process its own 32-bit address space.2 This means that address $1000 in one program is physically different from address $1000 in a separate program. The CPU achieves this sleight of hand by mapping the virtual addresses used by programs to different physical addresses in actual memory. The virtual address and the physical address don’t have to be the same, and usually they aren’t. For example, program 1’s virtual address $1000 might actually correspond to physical address $215000, while program 2’s virtual address $1000 might correspond to physical memory address $300000. The CPU accomplishes this using paging.
The concept behind paging is quite simple. First, you break up memory into blocks of bytes called pages. A page in main memory is comparable to a cache line in a cache subsystem, although pages are usually much larger than cache lines. For example, the 32-bit 80x86 CPUs use a page size of 4,096 bytes; 64-bit variants allow larger page sizes.
For each page, you use a lookup table to map the HO bits of a virtual address to the HO bits of the physical address in memory, and you use the LO bits of the virtual address as an index into that page. For example, with a 4,096-byte page, you’d use the LO 12 bits of the virtual address as the offset (0..4095) within the page, and the upper 20 bits as an index into a lookup table that returns the actual upper 20 bits of the physical address (see Figure 11-5).
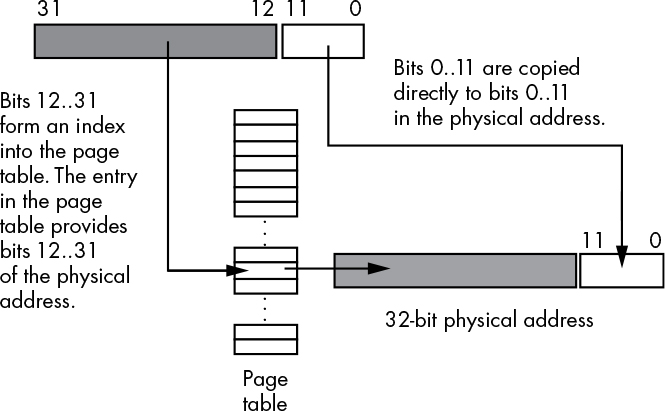
Figure 11-5: Translating a virtual address to a physical address
A 20-bit index into the page table would require over one million entries in the page table. If each entry is a 32-bit value, the page table would be 4MB long—larger than many of the programs that would run in memory! However, by using a multilevel page table, you can easily create a page table for most small programs that is only 8KB long. The details are unimportant here. Just rest assured that you don’t need a 4MB page table unless your program consumes the entire 4GB address space.
If you study Figure 11-5 for a few moments, you’ll probably discover one problem with using a page table—it requires two separate memory accesses in order to retrieve the data stored at a single physical address in memory: one to fetch a value from the page table, and one to read from or write to the desired memory location. To prevent cluttering the data or instruction cache with page-table entries, which increases the number of cache misses for data and instruction requests, the page table uses its own cache, known as the translation lookaside buffer (TLB). This cache typically has 64 to 512 entries on modern Intel processors—enough to handle a fair amount of memory without a miss. Because a program typically works with less data than this at any given time, most page-table accesses come from the cache rather than main memory.
As noted, each entry in the page table contains 32 bits, even though the system really only needs 20 bits to remap each virtual address to a physical address. Intel, on the 80x86, uses some of the remaining 12 bits to provide memory protection information:
- One bit marks whether a page is read/write or read-only.
- One bit determines whether you can execute code on that page.
- A number of bits determine whether the application can access that page or if only the operating system can do so.
- A number of bits determine if the CPU has written to the page but hasn’t yet written to the physical memory address corresponding to it (that is, whether the page is “dirty” or not, and whether the CPU has accessed the page recently).
- One bit determines whether the page is actually present in physical memory or if it exists on secondary storage somewhere.
Your applications do not have access to the page table (reading and writing the page table is the operating system’s responsibility), so they cannot modify these bits. However, some operating systems provide functions you can call if you want to change certain bits in the page table (for example, Windows allows you to set a page to read-only).
Beyond remapping memory so multiple programs can coexist in main memory, paging also provides a mechanism whereby the operating system can move infrequently used pages to secondary storage. Locality of reference applies not only to cache lines but to pages in main memory as well. At any given time, a program will access only a small percentage of the pages in main memory that contain data and instruction bytes; this set of pages is known as the working set. Although the working set varies slowly over time, for small periods of time it remains constant. Therefore, there’s little need for the remainder of the program to consume valuable main-memory storage that some other process could be using. If the operating system can save the currently unused pages to disk, the main memory they would consume is available for other programs that need it.
Of course, the problem with moving data out of main memory is that eventually the program might actually need it. If you attempt to access a page of memory, and the page-table bit tells the memory management unit (MMU) that the page isn’t present in main memory, the CPU interrupts the program and passes control to the operating system. The operating system reads the corresponding page of data from the disk drive and copies it to some available page in main memory. This process is nearly identical to the process used by a fully associative cache subsystem, except that accessing the disk is much slower than accessing main memory. In fact, you can think of main memory as a fully associative write-back cache with 4,096-byte cache lines, which caches the data that is stored on the disk drive. Placement and replacement policies and other behaviors are very similar for caches and main memory.
NOTE
For more information on how the operating system swaps pages between main memory and secondary storage, consult a textbook on operating system design.
Because each program has a separate page table, and programs themselves don’t have access to the page tables, programs cannot interfere with one another’s operation. That is, a program cannot change its page tables in order to access data found in another process’s address space. If your program crashes by overwriting itself, it cannot crash other programs at the same time. This is a big benefit of a paging memory system.
If two programs want to cooperate and share data, they can do so by placing that data in a memory area that they share. All they have to do is tell the operating system that they want to share some pages of memory. The operating system returns to each process a pointer to some segment of memory whose physical address is the same for both processes. Under Windows, you can achieve this by using memory-mapped files; see the operating system documentation for more details. macOS and Linux also support memory-mapped files as well as some special shared-memory operations; again, see the OS documentation for more details.
Although this discussion applies specifically to the 80x86 CPU, multilevel paging systems are common on other CPUs as well. Page sizes tend to vary from about 1KB to 4MB, depending on the CPU. For CPUs that support an address space larger than 4GB, some CPUs use an inverted page table or a three-level page table. Although the details are beyond the scope of this chapter, the basic principle remains the same: the CPU moves data between main memory and the disk in order to keep oft-accessed data in main memory as much of the time as possible. These other page-table schemes are good at reducing the size of the page table when an application uses only a fraction of the available memory space.
Thrashing
Thrashing is a degenerate case that can cause the overall system performance to drop to the speed of a lower level in the memory hierarchy, like main memory or, worse yet, the disk drive. There are two primary causes of thrashing:
- Insufficient memory at a given level in the memory hierarchy to properly contain the programs’ working sets of cache lines or pages
- A program that does not exhibit locality of reference
If there is insufficient memory to hold a working set of pages or cache lines, the memory system will constantly be replacing one block of data in the cache or main memory with another block of data from main memory or the disk. As a result, the system winds up operating at the speed of the slower memory in the memory hierarchy. A common example of thrashing occurs with virtual memory. A user may have several applications running at the same time, and the sum total of the memory required by these programs’ working sets is greater than all of the physical memory available to the programs. As a result, when the operating system switches between the applications it has to copy each application’s data, and possibly program instructions, to and from disk. Because switching between programs is often much faster than retrieving data from the disk, this slows the programs down tremendously.
As already discussed, if the program does not exhibit locality of reference and the lower memory subsystems are not fully associative, thrashing can occur even if there is free memory at the current level in the memory hierarchy. To revisit our earlier example, suppose an 8KB L1 caching system uses a direct-mapped cache with 512 16-byte cache lines. If a program references data objects 8KB apart on every access, the system will have to replace the same line in the cache over and over again with the data from main memory. This occurs even though the other 511 cache lines are currently unused.
To reduce thrashing when insufficient memory is the problem, you can simply add memory. If that’s not an option, you can try to run fewer processes concurrently or modify your program so that it references less memory over a given period. To reduce thrashing when locality of reference is the culprit, you should restructure your program and its data structures so its memory references are physically closer.
11.7 Writing Software That Is Cognizant of the Memory Hierarchy
Software that is aware of memory performance behavior can run much faster than software that is not. Although a system’s caching and paging facilities may perform reasonably well for typical programs, it’s easy to write software that would run faster even if the caching system were not present. The best software is written to take maximum advantage of the memory hierarchy.
A classic example of a bad design is the following loop, which initializes a two-dimensional array of integer values:
int array[256][256];
. . .
for( i=0; i<256; ++i )
for( j=0; j<256; ++j )
array[j][i] = i*j;
Believe it or not, that code runs much slower on a modern CPU than the following sequence:
int array[256][256];
. . .
for( i=0; i<256; ++i )
for( j=0; j<256; ++j )
array[i][j] = i*j;
The only difference between the two code sequences is that the i and j indices are swapped when accessing elements of the array. This minor modification can be responsible for a one or two order of magnitude difference in their respective runtimes! To understand why, remember that the C programming language uses row-major ordering for two-dimensional arrays in memory. That means the second code sequence accesses sequential locations in memory, exhibiting spatial locality of reference. The first code sequence, however, accesses array elements in the following order:
array[0][0]
array[1][0]
array[2][0]
array[3][0]
. . .
array[254][0]
array[255][0]
array[0][1]
array[1][1]
array[2][1]
. . .
If integers are 4 bytes each, then this sequence will access the double-word values at offsets 0; 1,024; 2,048; 3,072; and so on, from the base address of the array, which are distinctly not sequential. Most likely, this code will load only n integers into an n-way set associative cache and then immediately cause thrashing thereafter, as each subsequent array element has to be copied from the cache into main memory to prevent that data from being overwritten.
The second code sequence does not exhibit thrashing. Assuming 64-byte cache lines, the second code sequence will store 16 integer values into the same cache line before having to load another cache line from main memory, replacing an existing one. As a result, this second code sequence spreads out the cost of retrieving the cache line from memory over 16 memory accesses rather than over a single access, as occurs with the first code sequence.
In addition to accessing variables sequentially in memory, there are several other variable declaration tricks you can use to maximize the performance of the memory hierarchy. First, declare together all variables you use within a common code sequence. In most languages, this will allocate storage for the variables in physically adjacent memory locations, thus supporting spatial locality as well as temporal locality. Second, use local (automatic) variables, because most languages allocate local storage on the stack and, as the system references the stack frequently, variables on the stack tend to be in the cache. Third, declare your scalar variables together, and separately from your array and record variables. Access to any one of several adjacent scalar variables generally forces the system to load all of the adjacent objects into the cache.
In general, study the memory access patterns your program exhibits and adjust your application accordingly. You can spend hours rewriting your code in hand-optimized assembly language trying to achieve a 10 percent performance improvement, but if you instead modify the way your program accesses memory, it’s not unheard of to see an order of magnitude improvement in performance.
11.8 Runtime Memory Organization
Operating systems like macOS, Linux, or Windows put different types of data into different sections (or segments) of main memory. Although it’s possible to control the memory organization by running a linker and specifying various parameters, by default Windows loads a typical program into memory using the organization shown in Figure 11-6 (macOS and Linux are similar, though they rearrange some of the sections).
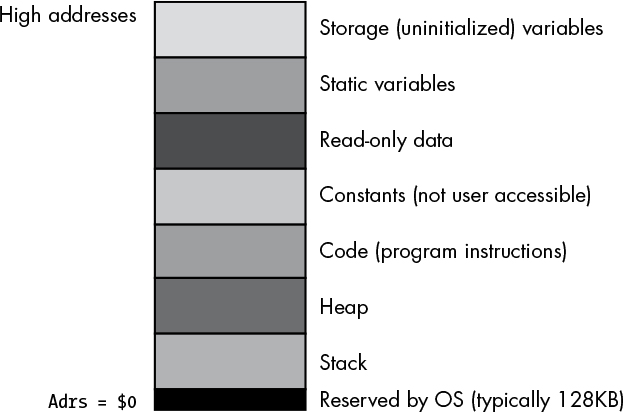
Figure 11-6: Typical Windows runtime memory organization
The operating system reserves the lowest memory addresses, and your application generally cannot access data (or execute instructions) at these addresses. One reason the OS reserves this space is to help detect NULL pointer references. Programmers often initialize a pointer with NULL (0) to indicate that it is not valid. Should you attempt to access memory location 0 under such an OS, it will generate a general protection fault to indicate that you’ve accessed a memory location that doesn’t contain valid data.
The remaining seven sections of memory hold different types of data associated with your program:
- The code section holds the program’s machine instructions.
- The constant section contains compiler-generated read-only data.
- The read-only data section holds user-defined data that can only be read, never written.
- The static section stores user-defined, initialized, static variables.
- The storage, or BSS, section holds user-defined uninitialized variables.
- The stack section maintains local variables and other temporary data.
- The heap section maintains dynamic variables.
NOTE
Often, a compiler will combine the code, constant, and read-only data sections because they all contain read-only data.
Most of the time, a given application can live with the default layouts chosen for these sections by the compiler and linker/loader. In some cases, however, knowing the memory layout can help you develop shorter programs. For example, combining the code, constants, and read-only data sections into a single read-only section can save padding space that the compiler/linker might otherwise place between them. Although these savings are probably insignificant for large applications, they can have a big impact on the size of a small program.
The following sections discuss each of these memory areas in detail.
11.8.1 Static and Dynamic Objects, Binding, and Lifetime
Before exploring the memory organization of a typical program, we need to define a few terms: binding, lifetime, static, and dynamic.
Binding is the process of associating an attribute with an object. For example, when you assign a value to a variable, the value is bound to that variable at the point of the assignment. This bond remains until you bind some other value to the variable (via another assignment operation). Likewise, if you allocate memory for a variable while the program is running, the variable is bound to the address at that point. They remain bound until you associate a different address with the variable. Binding needn’t occur at runtime. For example, values are bound to constant objects during compilation, and these bonds cannot change while the program is running.
The lifetime of an attribute extends from the point when you first bind that attribute to an object to the point when you break that bond, perhaps by binding a different attribute to the object. For example, the lifetime of a variable is from the time you first associate memory with the variable to the moment you deallocate that variable’s storage.
Static objects are those that have an attribute bound to them prior to the application’s execution (usually during compilation or during the linking phase, though it is possible to bind values even earlier). Constants are good examples of static objects; they have the same value bound to them throughout program execution. Global (program-level) variables in programming languages like Pascal, C/C++, and Ada are also examples of static objects in that they have the same address bound to them throughout the program’s lifetime. The lifetime of a static object, therefore, extends from the point at which the program first begins execution to the point when the application terminates.
Associated with static binding is the notion of identifier scope—the section of the program where the identifier’s name is bound to the object. As names exist only during compilation, scope qualifies as a static attribute in compiled languages. (In interpretive languages, where the interpreter maintains the identifier names during program execution, scope can be a nonstatic attribute.) The scope of a local variable is generally limited to the procedure or function in which you declare it (or to any nested procedure or function declarations in block structured languages like Pascal or Ada), and the name is not visible outside the subroutine. In fact, it’s possible to reuse an identifier’s name in a different scope (that is, in a different function or procedure). In that case, the second occurrence of the identifier will be bound to a different object than its first occurrence.
Dynamic objects are those that have some attribute assigned to them during program execution. While it is running, the program may choose to change that attribute (dynamically). The lifetime of that attribute begins when the application binds the attribute to the object and ends when the program breaks that bond. If the program never breaks the bond, the attribute’s lifetime extends from the point of association to the point the program terminates. The system binds dynamic attributes to an object at runtime, after the application begins execution.
NOTE
An object may have a combination of static and dynamic attributes. For example, a static variable has an address bound to it for the entire execution time of the program, but it could have different values bound to it throughout the program’s lifetime. Any given attribute, however, is either static or dynamic; it cannot be both.
11.8.2 The Code, Read-Only, and Constant Sections
The code section in memory contains the machine instructions for a program. Your compiler translates each statement you write into a sequence of one or more byte values. The CPU interprets these byte values as machine instructions during program execution.
Most compilers also attach a program’s read-only data to the code section because, like the code instructions, the read-only data is already write-protected. However, it is perfectly possible under Windows, macOS, Linux, and many other operating systems to create a separate section in the executable file and mark it as read-only. As a result, some compilers support a separate read-only data section. Such sections contain initialized data, tables, and other objects that the program should not change during program execution.
The constant section shown in Figure 11-6 typically contains data that the compiler generates (as opposed to user-defined read-only data). Most compilers actually emit this data directly to the code section. This is why, as previously noted, in most executable files, you’ll find a single section that combines the code, read-only data, and constant data sections.
11.8.3 The Static Variables Section
Many languages enable you to initialize a global variable during the compilation phase. For example, in C/C++ you could use statements like the following to provide initial values for these static objects:
static int i = 10;
static char ch[] = { 'a', 'b', 'c', 'd' };
In C/C++ and other languages, the compiler places these initial values in the executable file. When you execute the application, the OS loads the portion of the executable file that contains these static variables into memory so that the values appear at the addresses associated with those static variables. Therefore, when the program shown here first begins execution, i and ch will have these values bound to them.
11.8.4 The Storage Variables Section
The storage variables (or BSS) section is where compilers typically put static objects that don’t have an explicit value associated with them. BSS stands for “block started by a symbol,” which is an old assembly language term describing a pseudo-opcode you would use to allocate storage for an uninitialized static array. In modern operating systems like Windows and Linux, the compiler/linker puts all uninitialized variables into a BSS section that simply tells the OS how many bytes to set aside for that section. When the OS loads the program into memory, it reserves sufficient memory for all the objects in the BSS section and fills this range of memory with 0s.
Note that the BSS section in the executable file doesn’t actually contain any data, so programs that declare uninitialized static objects (especially large arrays) in a BSS section will consume less disk space.
However, not all compilers actually use a BSS section. Some Microsoft languages and linkers, for example, simply place the uninitialized objects in the static/read-only data section and explicitly give them an initial value of 0. Although Microsoft claims that this scheme is faster, it certainly makes executable files larger if your code has large, uninitialized arrays (because each byte of the array winds up in the executable file—something that would not happen if the compiler placed the array in a BSS section).
11.8.5 The Stack Section
The stack is a data structure that expands and contracts in response to procedure invocations and returns to calling routines, among other things. At runtime, the system places all automatic variables (nonstatic local variables), subroutine parameters, temporary values, and other objects in the stack section of memory in a special data structure called an activation record (which is aptly named, as the system creates it when a subroutine first begins execution, and deallocates it when the subroutine returns to its caller). Therefore, the stack section in memory is very busy.
Most CPUs implement the stack using a register called the stack pointer. Some CPUs, however, don’t provide an explicit stack pointer, instead using a general-purpose register for stack implementation. If a CPU provides a stack pointer, we say that it supports a hardware stack; if it uses a general-purpose register, then we say that it uses a software-implemented stack. The 80x86 provides a hardware stack, while the MIPS Rx000 CPU family uses a software-implemented stack. Systems that provide hardware stacks can generally manipulate data on the stack using fewer instructions than systems that implement the stack in software. In theory, a hardware stack actually slows down all instructions the CPU executes, but in practice, the 80x86 CPU is one of the fastest CPUs around, providing ample proof that having a hardware stack doesn’t necessarily mean you’ll wind up with a slow CPU.
11.8.6 The Heap Section and Dynamic Memory Allocation
Although simple programs may need only static and automatic variables, sophisticated programs need to be able to allocate and deallocate storage dynamically (at runtime) under program control. The C and HLA languages provide the malloc() and free() functions for this purpose, C++ provides new() and delete(), Pascal uses new() and dispose(), and other languages include comparable routines. These memory allocation routines have a few things in common: they let the programmer request how many bytes of storage to allocate, they return a pointer to the newly allocated storage (that is, the address of that storage), and they provide a facility for returning the storage space to the system once it is no longer needed, so the system can reuse it in a future allocation call. Dynamic memory allocation takes place in a section of memory known as the heap.
Generally, an application refers to data on the heap using pointer variables either implicitly or explicitly; some languages, like Java, implicitly use pointers behind the scenes. Thus, objects in heap memory are usually known as anonymous variables because we refer to them by their memory address (via pointers) rather than by name.
The OS and application create the heap section in memory after the program begins execution; the heap is never a part of the executable file. Generally, the OS and language runtime libraries maintain the heap for an application. Despite the variations in memory management implementations, it’s still a good idea for you to have a basic idea of how heap allocation and deallocation operate, because using them inappropriately will have a very negative impact on your application performance.
11.8.6.1 A Simple Memory Allocation Scheme
An extremely simple (and fast) memory allocation scheme would return a pointer to a block of memory whose size the caller requests. It would carve out allocation requests from the heap, returning blocks of memory that are currently unused.
A very simple memory manager might maintain a single variable (a free space pointer) pointing to the heap. Whenever a memory allocation request comes along, the system makes a copy of this heap pointer and returns it to the application; then the heap management routines add the size of the memory request to the address held in the pointer variable and verify that the memory request doesn’t try to use more memory than is available in the heap (some memory managers return an error indication, like a NULL pointer, when the memory request is too large, and others raise an exception). As the heap management routines increment the free space pointer, they effectively mark all previous memory as “unavailable for future requests.”
11.8.6.2 Garbage Collection
The problem with this simple memory management scheme is that it wastes memory, because there’s no garbage collection mechanism for the application to free the memory so it can be reused later. Garbage collection—that is, reclaiming memory when an application has finished using it—is one of the main purposes of a heap management system.
The only catch is that supporting garbage collection requires some overhead. The memory management code will need to be more sophisticated, will take longer to execute, and will require some additional memory to maintain the internal data structures the heap management system uses.
Let’s consider an easy implementation of a heap manager that supports garbage collection. This simple system maintains a (linked) list of free memory blocks. Each free memory block in the list requires two double-word values: one specifying the size of the free block, and the other containing a link to the next free block in the list (that is, a pointer), as shown in Figure 11-7.
The system initializes the heap with a NULL link pointer, and the size field contains the size of the heap’s entire free space. When a memory allocation request comes along, the heap manager searches through the list to find a free block with enough memory to satisfy the request. This search process is one of the defining characteristics of a heap manager. Some common search algorithms are first-fit search and best-fit search. A first-fit search, as its name suggests, scans the list of blocks until it finds the first block of memory large enough to satisfy the allocation request. A best-fit search scans the entire list and finds the smallest block large enough to satisfy the request. The advantage of the best-fit algorithm is that it tends to preserve larger blocks better than the first-fit algorithm, so the system is still able to satisfy larger subsequent allocation requests when they arrive. The first-fit algorithm, on the other hand, just grabs the first suitably large block it finds, even if there’s a smaller block that would suffice, which may limit the system’s ability to handle future large memory requests.

Figure 11-7: Heap management using a list of free memory blocks
Still, the first-fit algorithm does have a couple of advantages over the best-fit algorithm. The most obvious is that it is usually faster. The best-fit algorithm has to scan through every block in the free block list in order to find the smallest one large enough to satisfy the allocation request (unless, of course, it finds a perfectly sized block along the way). The first-fit algorithm can stop once it finds a block large enough to satisfy the request.
The first-fit algorithm also tends to suffer less from a degenerate condition known as external fragmentation. Fragmentation occurs after a long sequence of allocation and deallocation requests. Remember, when the heap manager satisfies a memory allocation request, it usually creates two blocks of memory: one in-use block for the request, and one free block that contains the remaining bytes from the original block (assuming the request did not exactly match the block size). After operating for a while, the best-fit algorithm may have produced lots of leftover blocks of memory that are too small to satisfy an average memory request, making them effectively unusable. As these small fragments accumulate throughout the heap, they can end up consuming a fair amount of memory. This can lead to a situation where the heap doesn’t have a sufficiently large block to satisfy a memory allocation request even though there is enough total free memory available (spread throughout the heap). See Figure 11-8 for an example of this condition.
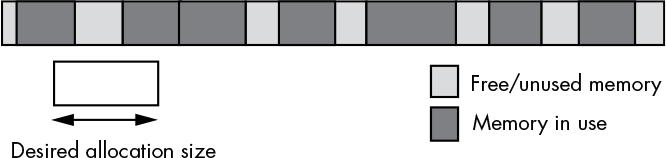
Figure 11-8: Memory fragmentation
There are other memory allocation strategies in addition to the first-fit and best-fit search algorithms. Some of these execute faster, some have less memory overhead, some are easy to understand (and some are very complex), some produce less fragmentation, and some can combine and use noncontiguous blocks of free memory. Memory/heap management is one of the more heavily studied subjects in computer science, and there’s a considerable amount of literature explaining the benefits of one scheme over another. For more information on memory allocation strategies, check out a good book on OS design.
11.8.6.3 Freeing Allocated Memory
Memory allocation is only half of the story. As mentioned earlier, the heap manager has to provide a call that allows an application to return memory it no longer needs for future reuse. In C and HLA, for example, an application accomplishes this by calling the free() function.
At first blush, free() might seem like a very simple function to write: just append the previously allocated and now unused block to the end of the free list. The problem with this trivial implementation is that it almost guarantees that the heap becomes fragmented to the point of being unusable in very short order. Consider the situation in Figure 11-9.

Figure 11-9: Freeing a memory block
If a trivial implementation of free() simply takes the block to be freed and appends it to the free list, the memory organization in Figure 11-9 produces three free blocks. However, because these three blocks are contiguous, the heap manager should really combine them into a single free block, so that it will be able to satisfy a larger request. Unfortunately, this operation would require it to scan the free block list to determine if there are any free blocks adjacent to the block the system is freeing.
While you could come up with a data structure that makes it easier to combine adjacent free blocks, such schemes generally add 8 or more bytes of overhead with each block on the heap. Whether or not this is a reasonable tradeoff depends on the average size of a memory allocation. If the applications that use the heap manager tend to allocate small objects, the extra overhead for each memory block could wind up consuming a large percentage of the heap space. However, if the most allocations are large, then the few bytes of overhead won’t matter much.
11.8.6.4 The OS and Memory Allocation
The performance of the algorithms and data structures used by the heap manager is only one piece of the performance puzzle. Ultimately, the heap manager needs to request blocks of memory from the operating system. At one extreme, the OS handles all memory allocation requests directly. At the other extreme, the heap manager is a runtime library routine that links with your application, first requesting large blocks of memory from the OS and then doling out pieces of them as allocation requests arrive from the application.
The problem with making direct memory allocation requests to the operating system is that OS API calls are often very slow. This is because they generally involve switching between kernel mode and user mode on the CPU (which is not fast). Therefore, a heap manager that the OS implements directly will not perform well if your application makes frequent calls to the memory allocation and deallocation routines.
Because of the high overhead of an OS call, most languages implement their own versions of the malloc() and free() functions within their runtime library. On the very first memory allocation, the malloc() routine requests a large block of memory from the OS, and the application’s malloc() and free() routines manage this block of memory themselves. If an allocation request comes along that the malloc() function cannot fulfill in the block it originally created, malloc() will request another large block (generally much larger than the request) from the OS and add that block to the end of its free list. Because the application’s malloc() and free() routines call the OS only occasionally, the application doesn’t suffer the performance hit associated with frequent OS calls.
Most standard heap management functions perform reasonably for a typical program. However, keep in mind that the procedures are very implementation- and language-specific; it’s dangerous to assume that malloc() and free() are relatively efficient when writing software that requires high-performance components. The only portable way to ensure a high-performance heap manager is to develop your own application-specific set of allocation/deallocation routines. Writing such routines is beyond the scope of this book, but you should know you have this option.
11.8.6.5 Heap Memory Overhead
A heap manager often exhibits two types of overhead: performance (speed) and memory (space). Until now, this discussion has mainly dealt with the performance aspects, but now we’ll turn our attention to memory.
Each block the system allocates requires some amount of overhead beyond the storage the application requests; at the very least, this overhead is a few bytes to keep track of the block’s size. Fancier (higher-performance) schemes may require additional bytes, but typically the overhead is between 4 and 16 bytes. The heap manager can keep this information in a separate internal table, or it can attach the block size and other memory management information directly to the block it allocates.
Saving this information in an internal table has a couple of advantages. First, it is difficult for the application to accidentally overwrite the information stored there; attaching the data to the heap memory blocks themselves doesn’t protect as well against this possibility. Second, putting memory management information in an internal data structure allows the memory manager to determine whether a given pointer is valid (that is, whether it points at some block of memory that the heap manager believes it has allocated).
The advantage of attaching the control information directly to each block that the heap manager allocates is that it’s very easy to locate this information, whereas storing the information in an internal table might require a search operation.
Another issue that affects the overhead associated with the heap manager is the allocation granularity—the minimum number of bytes the heap manager supports. Although most heap managers allow you to request an allocation as small as 1 byte, they may actually allocate some minimum number of bytes greater than 1. To ensure an allocated object is aligned on a reasonable address for that object, most heap managers allocate memory blocks on a 4-, 8-, or 16-byte boundary. For performance reasons, many heap managers begin each allocation on a typical cache-line boundary, usually 16, 32, or 64 bytes.
Whatever the granularity, if the application requests some number of bytes that is less than or not a multiple of the heap manager’s granularity, the heap manager will allocate extra bytes of storage so that the complete allocation is an even multiple of the granularity value. This amount varies by heap manager (and possibly even by version of a specific heap manager), so an application should never assume that it has more memory available than it requests.
The extra memory the heap manager allocates results in another form of fragmentation called internal fragmentation. Like external fragmentation, internal fragmentation produces small amounts of leftover memory throughout the system that cannot satisfy future allocation requests. Assuming random-sized memory allocations, the average amount of internal fragmentation that occurs on each allocation is half the granularity size. Fortunately, the granularity size is quite small for most memory managers (typically 16 bytes or less), so after thousands and thousands of memory allocations you’ll lose only a couple dozen or so kilobytes to internal fragmentation.
Between the costs associated with allocation granularity and the memory control information, a typical memory request may require between 4 and 16 bytes, plus whatever the application requests. If you’re making large memory allocation requests (hundreds or thousands of bytes), the overhead bytes won’t consume a large percentage of memory on the heap. However, if you allocate lots of small objects, the memory consumed by internal fragmentation and memory control information may represent a significant portion of your heap area. For example, consider a simple memory manager that always allocates blocks of data on 4-byte boundaries and requires a single 4-byte length value that it attaches to each allocation request for memory storage. This means that the minimum amount of storage the heap manager requires for each allocation is 8 bytes. If you make a series of malloc() calls to allocate a single byte, the application won’t be able to use almost 88 percent of the memory it allocates. Even if you allocate 4-byte values on each allocation request, the heap manager consumes 67 percent of the memory for overhead purposes. However, if your average allocation is a block of 256 bytes, the overhead requires only about 2 percent of the total memory allocation. In short, the larger your allocation request, the less impact the control information and internal fragmentation will have on your heap.
Many software engineering studies in computer science journals have found that memory allocation/deallocation requests cause a significant loss of performance. In such studies, the authors often obtained performance improvements of 100 percent or better just by implementing their own simplified, application-specific, memory management algorithms rather than calling the standard runtime library or OS kernel memory allocation code. Hopefully, this section has made you aware of this potential problem in your own code.
11.9 For More Information
Hennessy, John L., and David A. Patterson. Computer Architecture: A Quantitative Approach. 5th ed. Waltham, MA: Elsevier, 2012.