3
Design of Gesture-Based Hand Gloves Using Arduino UNO: A Grace to Abled Mankind
Harpreet Singh Bedi*, Dekkapati Vinit Raju, Nandyala Meghanath Reddy C. Partha Sai Kumar and Mandla Ravi Varma
SEEE, Lovely Professional University, Punjab, India
Abstract
Nowadays, technology and science are advancing at a rapid pace. The advancing or smart technology is “augmenting” the way of living in society. People need “smart” solutions to their problems. So, in this chapter, we would like to introduce a paradigm of smart technology, gesture-based wheelchair using Arduino UNO. The ideology is to introduce a wheelchair where physically challenged, deaf and mute or elderly people, can control the wheelchair and send an emergency message or SOS using GSM module, and a nearby person can see the emergency message on the LCD. The abovementioned tasks can be performed using hand gestures. This enables the disabled person to drive the wheelchair and move from one place to another with more efficiency. The proposed idea is to be comprised with comfort and mobility to the person in the wheelchair. Arduino UNO is the microcontroller which interfaces the components and performs tasks; flux sensors detect the hand gestures; MEMS sensor is used to convert digital signals into mechanical tasks; motor IC drives the motors; and GSM module sends the message to the responsible person. This makes our idea to be cost efficient compared to the joystick-controlled or voice-controlled wheelchair.
Keywords: Arduino, hand gloves, wheel chair, drives, motors
3.1 Introduction
The age of modern science has brought massive technological changes by utilizing modern electrical, electronic, and mechanical systems. In recent time, approximately 2.78% of the population require a wheelchair especially for elderly and disabled people. Embedded systems and digital information technology are becoming more relevant in our daily lives [1].
A special purpose system in which the computer is fully embedded to the unit or system it controls is known as an embedded system. These automated systems have made our lives much more convenient and relaxed. Traditional wheelchairs, as we all know, have several drawbacks in terms of versatility, bulkiness, and functionality. Here, we are developing a clever approach to allowing users to use hand motions and sync them with the movement of the wheelchair [2]. The idea is to provide a wheelchair which provides more mobility, and it will make people familiar with the machine, in the future. We can improve the mobility and usability of wheelchair with high accuracy [3].
A gesture-driven hand glove is a device that can be controlled using hand movements rather than the traditional keypad system [4]. Humans are frantically trying to come up with new ways to communicate with computers. In real life, it is a debilitating issue for a paralyzed person [5]. So, these types of systems are getting better and better with time. When movements were used for this interaction in this implementation, it resulted in a significant breakthrough. We present a method for controlling a mechanized wheelchair using only finger movements [6, 7]. This article aims to develop a prototype for a smart wheelchair-using idea from embedded systems to control it which is very useful for physically handicapped people [8].
3.1.1 Block Diagram
Arduino UNO: It is an open-source electronic device and has an onboard 8-bit ATmega328p, where it allows anyone to perform their own projects. It comprises a crystal oscillator, serial communication, voltage regulator, etc., to support Arduino UNO. Arduino IDE is a platform where one can program the Arduino UNO for the desired outcomes.
Flex Sensors: A flex sensor is a low-cost, simple-to-use sensor that measures the amount of bending or variations in resistance caused by bending.
MEMS Sensors: These are low-cost inertial sensors with high precision that are used in a wide variety of industrial applications. These sensors sense external stimuli and carry out mechanical tasks.

Figure 3.1. Block diagram of gesture-based hand gloves using Arduino UNO.
DC Motors: Compared to stepping motors, DC motors are faster, cost efficient, and compact in size.
GSM module: This module is widely used in Internet of Things (IoT) and embedded systems projects. Using AT commands, one can read, write, or delete SMS messages.
LCD Display: It is low cost and easy to program. It is an alphanumeric display which can print both alphabet and numbers.
3.1.2 The Proposed New Design
The new design was implemented for a variety of reasons, including both functional and ethical concerns. A simple and proven technology, as well as corresponding precision control, are integrated into the practical consideration of the equipment. The equipment is easier to manage and operate with because of the more efficient, easy-to-understand implementation [9]. The approach is also cost-effective, user-friendly, and simple to explain to people who are engineers. This design aims to solve the issue by creating a smart wheelchair that is different and special to disabled people, allowing them to travel around their neighborhood, workplaces, and markets without feeling any less important than other people due to their disability [10].
3.1.3 Circuit Diagram
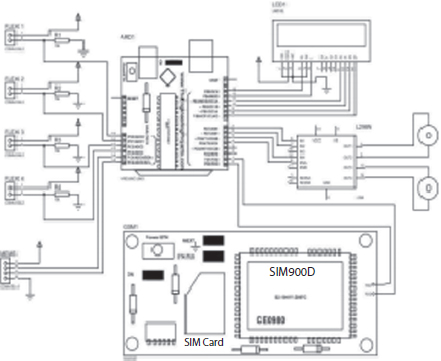
Figure 3.2. Circuit diagram of gesture-based hand gloves using Arduino UNO.
3.2 Result and Discussion
The complete hardware and the components required are mentioned along with the circuit diagram. We used the Arduino IDE for programming for the desired outcomes.

The proposed implementation is affordable and reliable as far as utilization is concerned. This gesture-based hand gloves to drive the wheelchair have many merits over the conventional wheelchair or SOS facility.

3.2.1 Data Analysis
The aim of this effort is to evaluate the efficiency of the finger’s motion and to use the accelerometer to adjust the wheelchair’s direction based on its finger. During the experiment, if the finger moves to the correct right hand, the wheelchair will move right, while if the finger moves to the wrong side, the wheelchair will move left. As shown in Table 3.1, wheelchair inventions can be operated in four directions: forward, reverse, left, and right.
Table 3.1 shows how we use an algorithm to regulate the motion of a wheelchair. The method is very simple, as previously mentioned, for a wheelchair whose motion is controlled with your index finger. The system was carried out with the same finger posture for the purpose of referring to it as the stable movement or “neutral position”. The wheelchair is propelled by electric motors that are operated by hand gloves that have a movement sensing system attached to them and are set to start mode.
3.3 Conclusion
The plan sets out to design and build a simple sensor microcontroller-based technology that had never been used in a wheelchair environment before. The aim of this work is to create an easily controllable, low-cost, and low-power wheelchair to bridge the communication gap between physically disabled, deaf, and mute people and the public. A wheelchair offers a disabled person fresh hope for living a full life. It instills in them the courage to function independently. This proposed work helps such communities to regain their confidence and makes them to do some tasks independently. It also acts as a personal assistant as well as SOS. Since the wheelchair is fully automated, it reduces the effort and physical strength of the disabled person. It can carry the load up to 100 kg.
Table 3.1 Algorithm setting for wheelchair direction.
| Index finger | Input from Arduino | Directions | |||
| D1 | D2 | D3 | D4 | ||
| Stable 0° | 0 | 0 | 0 | 0 | No movement |
| Bend to Right 45° | 0 | 0 | 0 | 1 | Right movement |
| Bend to Left 45° | 0 | 0 | 1 | 0 | Left movement |
| Bend to Backward 45° | 1 | 0 | 0 | 0 | Reverse movement |
| Bend to Forward 45° | 0 | 1 | 0 | 0 | Forward movement |
3.4 Future Scope
The future scope of this work is to use this gesture-based wheelchair in old age homes where the implementation will be useful for the people who find difficulty in their movements. This can be improved by many advancements such as, for physically challenged people who are unable to move their hands, they may have a wheelchair developed with a tongue motion driver to drive the wheelchair’s motors. It is also possible to have a speed control feature. For safety measures, we can implement high-power sensor like ultrasonic sensor for object detection. Self-power generation from the rotation of the wheel could be possible in the future, with the device being charged by solar power. Therefore, the stress associated with charging the battery may be alleviated. Artificial Intelligence can also be included to make wheelchair more technically advance.
References
1. Pande, Prof. V. V., Ubale, N.S., Masurkar, D.P., Ingole, N.R., Mane, P.P., Yaman, F., Lin, Q., Agrawal, G.P., Hand Gesture Based Wheelchair Movement Control for Disabled Person Using MEMS. Int. J. Eng. Res. Appl., Vol. 4, 4(Version4), 152–158, April 2014. Available: www.ijera.com (Accessed, Nov. 10, 2014) (13).
2. Kazerooni, H., Fairbanks, D., Chen, A., Shin, G., The Magic Glove, University of California Berkeley, Berkeley, California, 2006.
3. Zimmerman, T.G. et al., A Hand Gesture Interface Device. II Proc. Human Facttors in Computing System and Graphics Interface, ACM Press, New York, April 1987.
4. Anoop, K.J., Ezhilan, I., Raj, S., Seenivasan, R., Pandian, C., Designing and modeling of controlled wheel chair incorporated with home automation. Int. J. Adv. Res. Electr. Electron. Instrum. Eng., AnISO 3297:2007 Certified Organization). 3, 2, 2014.
5. S. Interactive Glove - International Journal of Industrial Electronics and Electrical Engineering,
6. International Journal of Engineering and Computer Science, 4, 9, pp. 14439–14442, Sep 2015.
7. World Health Organization, World report on disability, 2011.
8. Chowdhury, SM Mazharul Hoque, Smart wheelchair for disabled people, Diss. Jahangirnagar University, 2019.
9. Warad, S., Hiremath, V., Dhandargi, P., Bharath, V., Bhagavati, P.B., Speech and flex sensor-controlled wheelchair for physically disabled people. Proceedings of 10th IRF International Conference, Pune, India, 01st June-2014.
10. Shayban, N. and Muhammad, A.G.K., Wireless Head Gesture Controlled Wheelchair for Disable Persons presented by Shayban Nasif & Muhammad Abdul Goffar Khan (EEE Department Rajshahi University).
* Corresponding author: [email protected]