
Chapter 9. Distributed Search Execution
Before moving on, we are going to take a detour and talk about how search is executed in a distributed environment. It is a bit more complicated than the basic create-read-update-delete (CRUD) requests that we discussed in Chapter 4.
A CRUD operation deals with a single document that has a unique combination of
_index, _type, and routing values (which defaults to the
document’s _id). This means that we know exactly which shard in the cluster
holds that document.
Search requires a more complicated execution model because we don’t know which documents will match the query: they could be on any shard in the cluster. A search request has to consult a copy of every shard in the index or indices we’re interested in to see if they have any matching documents.
But finding all matching documents is only half the story. Results from
multiple shards must be combined into a single sorted list before the search
API can return a “page” of results. For this reason, search is executed in a
two-phase process called query then fetch.
Query Phase
During the initial query phase, the query is broadcast to a shard copy (a primary or replica shard) of every shard in the index. Each shard executes the search locally and builds a priority queue of matching documents.
The query phase process is depicted in Figure 9-1.
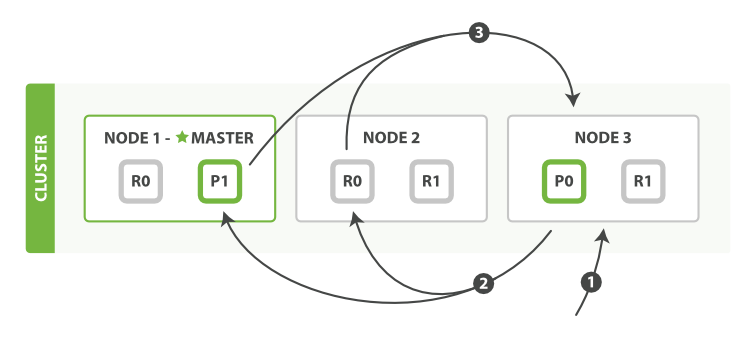
Figure 9-1. Query phase of distributed search
The query phase consists of the following three steps:
-
The client sends a
searchrequest toNode 3, which creates an empty priority queue of sizefrom + size. -
Node 3forwards the search request to a primary or replica copy of every shard in the index. Each shard executes the query locally and adds the results into a local sorted priority queue of sizefrom + size. -
Each shard returns the doc IDs and sort values of all the docs in its priority queue to the coordinating node,
Node 3, which merges these values into its own priority queue to produce a globally sorted list of results.
When a search request is sent to a node, that node becomes the coordinating node. It is the job of this node to broadcast the search request to all involved shards, and to gather their responses into a globally sorted result set that it can return to the client.
The first step is to broadcast the request to a shard copy of every node in
the index. Just like document GET requests, search requests
can be handled by a primary shard or by any of its replicas. This is how more
replicas (when combined with more hardware) can increase search throughput.
A coordinating node will round-robin through all shard copies on subsequent
requests in order to spread the load.
Each shard executes the query locally and builds a sorted priority queue of
length from + size—in other words, enough results to satisfy the global
search request all by itself. It returns a lightweight list of results to the
coordinating node, which contains just the doc IDs and any values required for
sorting, such as the _score.
The coordinating node merges these shard-level results into its own sorted priority queue, which represents the globally sorted result set. Here the query phase ends.
Fetch Phase
The query phase identifies which documents satisfy the search request, but we still need to retrieve the documents themselves. This is the job of the fetch phase, shown in Figure 9-2.
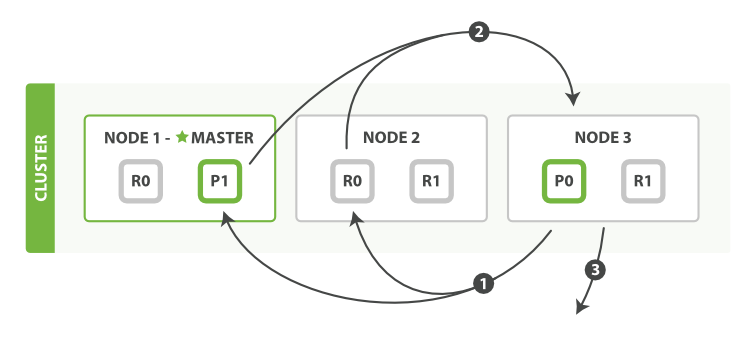
Figure 9-2. Fetch phase of distributed search
The distributed phase consists of the following steps:
-
The coordinating node identifies which documents need to be fetched and issues a multi
GETrequest to the relevant shards. -
Each shard loads the documents and enriches them, if required, and then returns the documents to the coordinating node.
-
Once all documents have been fetched, the coordinating node returns the results to the client.
The coordinating node first decides which documents actually need to be
fetched. For instance, if our query specified { "from": 90, "size": 10 },
the first 90 results would be discarded and only the next 10 results would
need to be retrieved. These documents may come from one, some, or all of the
shards involved in the original search request.
The coordinating node builds a multi-get request for each shard that holds a pertinent document and sends the request to the same shard copy that handled the query phase.
The shard loads the document bodies—the _source field—and, if
requested, enriches the results with metadata and
search snippet highlighting.
Once the coordinating node receives all results, it assembles them into a
single response that it returns to the client.
Search Options
A few optional query-string parameters can influence the search process.
preference
The preference parameter allows you to control which shards or nodes are
used to handle the search request. It accepts values such as _primary,
_primary_first, _local, _only_node:xyz, _prefer_node:xyz, and
_shards:2,3, which are explained in detail on the
search preference
documentation page.
However, the most generally useful value is some arbitrary string, to avoid the bouncing results problem.
timeout
By default, the coordinating node waits to receive a response from all shards. If one node is having trouble, it could slow down the response to all search requests.
The timeout parameter tells the coordinating node how long it should wait
before giving up and just returning the results that it already has. It can be
better to return some results than none at all.
The response to a search request will indicate whether the search timed out and how many shards responded successfully:
..."timed_out":true,
"_shards":{"total":5,"successful":4,"failed":1
},...
The search request timed out.
One shard out of five failed to respond in time.
If all copies of a shard fail for other reasons—perhaps because of a
hardware failure—this will also be reflected in the _shards section of
the response.
routing
In “Routing a Document to a Shard”, we explained how a custom routing parameter could be
provided at index time to ensure that all related documents, such as the
documents belonging to a single user, are stored on a single shard. At search
time, instead of searching on all the shards of an index, you can specify
one or more routing values to limit the search to just those shards:
GET/_search?routing=user_1,user2
This technique comes in handy when designing very large search systems, and we discuss it in detail in Chapter 43.
search_type
While query_then_fetch is the default search type, other search types can
be specified for particular purposes, for example:
GET/_search?search_type=count
count-
The
countsearch type has only aqueryphase. It can be used when you don’t need search results, just a document count or aggregations on documents matching the query. query_and_fetch-
The
query_and_fetchsearch type combines the query and fetch phases into a single step. This is an internal optimization that is used when a search request targets a single shard only, such as when aroutingvalue has been specified. While you can choose to use this search type manually, it is almost never useful to do so. dfs_query_then_fetchanddfs_query_and_fetch-
The
dfssearch types have a prequery phase that fetches the term frequencies from all involved shards in order to calculate global term frequencies. We discuss this further in “Relevance Is Broken!”. scan-
The
scansearch type is used in conjunction with thescrollAPI to retrieve large numbers of results efficiently. It does this by disabling sorting. We discuss scan-and-scroll in the next section.
scan and scroll
The scan search type and the scroll API are used together to retrieve
large numbers of documents from Elasticsearch efficiently, without paying the
penalty of deep pagination.
scroll-
A scrolled search allows us to do an initial search and to keep pulling batches of results from Elasticsearch until there are no more results left. It’s a bit like a cursor in a traditional database.
A scrolled search takes a snapshot in time. It doesn’t see any changes that are made to the index after the initial search request has been made. It does this by keeping the old data files around, so that it can preserve its “view” on what the index looked like at the time it started.
scan-
The costly part of deep pagination is the global sorting of results, but if we disable sorting, then we can return all documents quite cheaply. To do this, we use the
scansearch type. Scan instructs Elasticsearch to do no sorting, but to just return the next batch of results from every shard that still has results to return.
To use scan-and-scroll, we execute a search request setting search_type to
scan, and passing a scroll parameter telling Elasticsearch how long it
should keep the scroll open:
GET/old_index/_search?search_type=scan&scroll=1m{"query":{"match_all":{}},"size":1000}
Keep the scroll open for 1 minute.
The response to this request doesn’t include any hits, but does include a
_scroll_id, which is a long Base-64 encoded string. Now we can pass the
_scroll_id to the _search/scroll endpoint to retrieve the first batch of
results:
GET/_search/scroll?scroll=1mc2Nhbjs1OzExODpRNV9aY1VyUVM4U0NMd2pjWlJ3YWlBOzExOTpRNV9aY1VyUVM4U0NMd2pjWlJ3YWlBOzExNjpRNV9aY1VyUVM4U0NMd2pjWlJ3YWlBOzExNzpRNV9aY1VyUVM4U0NMd2pjWlJ3YWlBOzEyMDpRNV9aY1VyUVM4U0NMd2pjWlJ3YWlBOzE7dG90YWxfaGl0czoxOw==
Keep the scroll open for another minute.
The
_scroll_idcan be passed in the body, in the URL, or as a query parameter.
Note that we again specify ?scroll=1m. The scroll expiry time is refreshed
every time we run a scroll request, so it needs to give us only enough time
to process the current batch of results, not all of the documents that match
the query.
The response to this scroll request includes the first batch of results.
Although we specified a size of 1,000, we get back many more
documents. When scanning, the size is applied to each shard, so you will
get back a maximum of size * number_of_primary_shards documents in each
batch.
Note
The scroll request also returns a new_scroll_id. Every time
we make the next scroll request, we must pass the _scroll_id returned by the
previous scroll request.
When no more hits are returned, we have processed all matching documents.