
This class of methods is based on the idea that any user will like items appreciated by other users similar to them. In simple terms, the fundamental hypothesis is that a user A, who is similar to user B, will likely rate an item as B did rather than in another way. In practice, this concept is implemented by either comparing the taste of different user's and inferring the future rating for a given user using the most similar users taste (memory-based) or by extracting some rating patterns from what the users like (model-based) and trying to predict the future rating following these patterns. All these methods require a large amount of data to work because the recommendations to a given user rely on how many similar users can be found in the data. This problem is called cold start and it is very well studied in literature, which usually suggests using some hybrid method between CF and CBF to overcome the issue. In our MovieLens database example we assume we have enough data to avoid the cold start problem. Other common problems of CF algorithms are the scalability, because the computation grows with the number of users and products (it may be necessary some parallelization technique), and the sparsity of the utility matrix due to small number of items that any user usually rates (imputation is usually an attempt to handle the problem).
This subclass employs the utility matrix to calculate either the similarity between users or items. The methods suffer from scalability and cold start issues, but when they are applied to a large or too small utility matrix, they are currently used in many commercial systems today. We are going to discuss user-based Collaborative Filtering and iteFiased Collaborative Filtering hereafter.
The approach uses a k-NN method (see Chapter 3, Supervised Machine Learning) to find the users whose past ratings are similar to the ratings of the chosen user so that their ratings can be combined in a weighted average to return the current user's missing ratings.
The algorithm is as follows:
For any given user i and item not yet rated j:
- Find the K that is most similar users that have rate j using a similarity metric s.
- Calculate the predicted rating for each item j not yet rated by i as a weighted average over the ratings of the users K:

Here ![]() are the average ratings for users i and k to compensate for subjective judgment (some users are generous and some are picky) and s(i, k) is the similarity metric, as seen in the previous paragraph. Note that we can even normalize by the spread of the ratings per user to compare more homogeneous ratings:
are the average ratings for users i and k to compensate for subjective judgment (some users are generous and some are picky) and s(i, k) is the similarity metric, as seen in the previous paragraph. Note that we can even normalize by the spread of the ratings per user to compare more homogeneous ratings:

Here, σi and σk are the standard deviations of ratings of users i and k.
This algorithm has as an input parameter, the number of neighbors, K but usually a value between 20 and 50 is sufficient in most applications. The Pearson correlation has been found to return better results than cosine similarity, probably because the subtraction of the user ratings means that the correlation formula makes the users more comparable. The following code is used to predict the missing ratings of each user.
The u_vec represents the user ratings values from which the most similar other users K are found by the function FindKNeighbours. CalcRating just computes the predicted rating using the formula discussed earlier (without the spreading correction). Note that in case the utility matrix is so sparse that no neighbors are found, the mean rating of the user is predicted. It may happen that the predicted rating is beyond 5 or below 1, so in such situations the predicted rating is set to 5 or 1 respectively.

This approach is conceptually the same as user-based CF except that the similarity is calculated on the items rather than the users. Since most of the time the number of users can become much larger than the number of items, this method offers a more scalable recommendation system because the items' similarities can be precomputed and they will not change much when new users arrive (if the number of users N is significantly large).
The algorithm for each user i and item j is as follows:
- Find the K most similar items using a similarity metric s that i has already rated.
- Calculate the predicted rating as a weighted average of the ratings of the K items:

Note that the similarity metric may have a negative value, so we need to restrict the summation to only positive similarities in order to have meaningful (that is, positive) Pij (the relative ordering of items will be correct anyway if we are only interested in the best item to recommend instead of the ratings). Even in this case, a K value between 20 and 50 is usually fine in most applications.
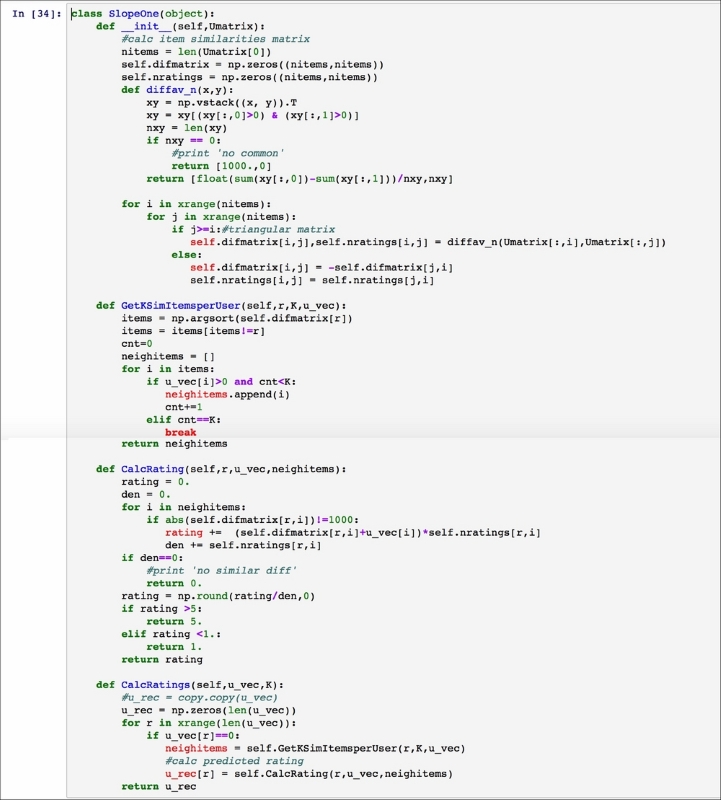
The algorithm is implemented using a class, as follows:

The constructor of the class CF_itembased calculates the item similarity matrix simmatrix to use any time we want to evaluate missing ratings for a user through the function CalcRatings. The function GetKSimItemsperUser finds K: most similar users to the chosen user (given by u_vec) and CalcRating just implements the weighted average rating calculations discussed previously. Note that in case no neighbors are found, the rating is set to the average or the item's ratings.
Instead of computing the similarity using the metric discussed previously, a very simple but effective method can be used. We can compute a matrix D in which each entry dij is the average difference between the ratings of items i and j:

Here,  is a variable that counts if the user k has rated both i and j items, so
is a variable that counts if the user k has rated both i and j items, so  is the number of users who have rated both i and j items.
is the number of users who have rated both i and j items.
Then the algorithm is as explained in the Item-based Collaborative Filtering section. For each user i and item j:
-
Find the K items with the smallest differences from j,
 (the
(the *indicates the possible index values, but for simplicity we relabel them from1to K). - Compute the predicted rating as a weighted average:

Although this algorithm is much simpler than the other CF algorithms, it often matches their accuracy, is computationally less expensive, and is easy to implement. The implementation is very similar to the class used for item-based CF:
The only difference is the matrix: now difmatrix is used to calculate the differences d(i, j) between items i, j, as explained earlier, and the function GetKSimItemsperUser now looks for the smallest difmatrix values to determine the K nearest neighbors. Since it is possible (although unlikely) that two items have not been rated by at least one user, difmatrix can have undefined values that are set to 1000 by default. Note that it is also possible that the predicted rating is beyond 5 or below 1, so in such situations the predicted rating must be set to 5 or 1 appropriately.
This class of methods uses the utility matrix to generate a model to extract the pattern of how the users rate the items. The pattern model returns the predicted ratings, filling or approximating the original matrix (matrix factorization).Various models have been studied in the literature and we will discuss particular matrix factorization algorithms—the Singular Value Decomposition (SVD, also with expectation maximization), the Alternating Least Square (ALS), the Stochastic Gradient Descent (SGD), and the general Non-negative matrix factorization (NMF) class of algorithms.
This is the simplest method to factorize the matrix R. Each user and each item can be represented in a feature space of dimension K so that:
Here, P N×K is the new matrix of users in the feature space, and Q M×K is the projection of the items in the same space. So the problem is reduced to minimize a regularized cost function J:

Here, λ is the regularization parameter, which is useful to avoid overfitting by penalizing the learned parameters and ensuring that the magnitudes of the vectors pi and qTj are not too large. The matrix entries Mcij are needed to check that the pair of user i and item j are actually rated, so Mcij is 1 if rij>0, and it's 0 otherwise. Setting the derivatives of J to 0 for each user vector pi and item vector qj, we obtain the following two equations:
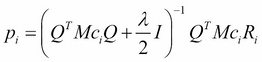

Here Ri and Mci refer to the row i of the matrices R and Mc, and Rj and Mcj refer to the column j of the matrices Mc and R. Alternating the fixing of the matrix P, Q, the previous equations can be solved directly using a least square algorithm and the following function implements the ALS algorithm in Python:

The matrix Mc is called mask, the variable l represents the regularization parameter lambda and is set to 0.001 by default, and the least square problem has been solved using the linalg.solve function of the Numpy library. This method usually is less precise than both Stochastic Gradient Descent (SGD) and Singular Value Decomposition (SVD) (see the following sections) but it is very easy to implement and easy to parallelize (so it can be fast).
This method also belongs to the matrix factorization subclass because it relies on the approximation of the utility matrix R as:
Here, the matrices P(N×K) and Q(M×K) represent the users and the items in a latent feature space of K dimensions. Each approximated rating ![]() can be expressed as follows:
can be expressed as follows:

The matrix ![]() is found, solving the minimization problem of the regularized squared errors e2ij as with the ALS method (cost function J as in Chapter 3, Supervised Machine Learning):
is found, solving the minimization problem of the regularized squared errors e2ij as with the ALS method (cost function J as in Chapter 3, Supervised Machine Learning):

This minimization problem is solved using the gradient descent (see Chapter 3, Supervised Machine Learning):


Here, α is the learning rate (see Chapter 3, Supervised Machine Learning) and  . The technique finds R alternating between the two previous equations (fixing qkj and solving Pik, and vice versa) until convergence. SGD is usually easier to parallelize (so it can be faster) than SVD (see the following section) but is less precise at finding good ratings. The implementation in Python of this method is given by the following script:
. The technique finds R alternating between the two previous equations (fixing qkj and solving Pik, and vice versa) until convergence. SGD is usually easier to parallelize (so it can be faster) than SVD (see the following section) but is less precise at finding good ratings. The implementation in Python of this method is given by the following script:

This SGD function has default parameters that are learning rate α = 0.0001, regularization parameter λ = l =0.001, maximum number of iterations 1000, and convergence tolerance tol = 0.001. Note also that the items not rated (0 rating values) are not considered in the computation, so an initial filling (imputation) is not necessary when using this method.
This is a group of methods that finds the decomposition of the matrix R again as a product of two matrices P (N×K) and Q (M×K) (where K is a dimension of the feature space), but their elements are required to be non-negative. The general minimization problem is as follows:

Here, α is a parameter that defines which regularization term to use (0 squared, 1 a lasso regularization, or a mixture of them) and λ is the regularization parameter. Several techniques have been developed to solve this problem, such as projected gradient, coordinate descent, and non-negativity constrained least squares. It is beyond the scope of this book to discuss the details of these techniques, but we are going to use the coordinate descent method implemented in sklearn NFM wrapped in the following function:

Note that an imputation may be performed before the actual factorization takes place and that the function fit_transform returns the P matrix while the QT matrix is stored in the nmf.components_ object. The α value is assumed to be 0 (squared regularization) and λ = l =0.01 by default. Since the utility matrix has positive values (ratings), this class of methods is certainly a good fit to predict these values.
We have already discussed this algorithm in Chapter 2, Unsupervised Machine Learning, as a dimensionality reduction technique to approximate a matrix by decomposition into matrices U, Σ, V (you should read the related section in Chapter 2, Unsupervised Machine Learning, for further technical details). In this case, SVD is used as a matrix factorization technique, but an imputation method is required to initially estimate the missing data for each user; typically, the average of each utility matrix row (or column) or a combination of both (instead of leaving the zero values) is used. Apart from directly applying the SVD to the utility matrix, another algorithm that exploits an expectation-maximization (see Chapter 2, Unsupervised Machine Learning) can be used as follows, starting from the matrix ![]() :
:
- m-step: Perform

- e-step:

This procedure is repeated until the sum of squared errors  is less than a chosen tolerance. The code that implements this algorithm and the simple SVD factorization is as follows:
is less than a chosen tolerance. The code that implements this algorithm and the simple SVD factorization is as follows:

Note that the SVD is given by the sklearn library and both imputation average methods (user ratings' average and item ratings' average) have been implemented, although the function default is none, which means that the zero values are left as initial values. For the expect-maximization SVD, the other default parameters are the convergence tolerance (0.0001) and the maximum number of iterations (10,000). This method (especially with expectation-maximization) is slower than the ALS, but the accuracy is generally higher. Also note that the SVD method decomposes the utility matrix subtracted by the user ratings' mean since this approach usually performs better (the user ratings' mean is then added after the SVD matrix has been computed).
We finish remarking that SVD factorization can also be used in memory-based CF to compare users or items in the reduced space (matrix U or VT) and then the ratings are taken from the original utility matrix (SVD with k-NN approach).