
Differential Equations
To paraphrase the Greek philosopher Heraclitus,“The only thing constant is change.” Differential equations describe mathematically how things in the physical world change—both in time and in space. While the solution of an algebraic equation is usually a number, the solution of a differential equation gives a function.
In this chapter, we consider ordinary differential equations (ODEs), which involve just two variables, say, an independent variable ![]() and a dependent variable
and a dependent variable ![]() . Later we will take up partial differential equations, which have two or more independent variables. The most general ordinary differential equation is a relationship of the form
. Later we will take up partial differential equations, which have two or more independent variables. The most general ordinary differential equation is a relationship of the form
![]() (8.1)
(8.1)
in which the object is to solve for ![]() , consistent with one or more specified boundary conditions. The order of a differential equation is determined by the highest-order derivative. For a large number of applications in physics, chemistry, and engineering, it suffices to consider first-and second-order differential equations, with no higher derivatives than
, consistent with one or more specified boundary conditions. The order of a differential equation is determined by the highest-order derivative. For a large number of applications in physics, chemistry, and engineering, it suffices to consider first-and second-order differential equations, with no higher derivatives than ![]() . In this chapter, we will deal with linear ODEs of the general form
. In this chapter, we will deal with linear ODEs of the general form
![]() (8.2)
(8.2)
where ![]() , and
, and ![]() are known functions. When
are known functions. When ![]() , the equation is said to be homogeneous, otherwise inhomogeneous.
, the equation is said to be homogeneous, otherwise inhomogeneous.
8.1 First-Order Differential Equations
A first-order equation of the form
![]() (8.3)
(8.3)
can be solved by separation of variables. We rearrange the equation to
![]() (8.4)
(8.4)
and then integrate to give
![]() (8.5)
(8.5)
After exponentiating the equation (making it the exponent of ![]() ), we obtain
), we obtain
![]() (8.6)
(8.6)
The constant is determined by an initial or boundary condition.
For the inhomogeneous analog of (8.3):
![]() (8.7)
(8.7)
separation of variables can be done after introducing an integrating factor. Note first that
![]() (8.8)
(8.8)
Thus Eq. (8.7) can be arranged to
![]() (8.9)
(8.9)
The solution is
![]() (8.10)
(8.10)
This will look a lot less intimidating once the function ![]() is explicitly specified.
is explicitly specified.
We will consider next a few illustrative examples of first-order differential equations of physical significance. In several cases, independent variable ![]() will be the time
will be the time ![]() .
.
A radioactive element disintegrates at a rate which is independent of any external conditions. The number of disintegrations occurring per unit time is proportional to the number of atoms originally present. This can be formulated as a first-order differential equation in time:
![]() (8.11)
(8.11)
The rate constant![]() is a characteristic of the radioactive element. The minus sign reflects the fact that the number of atoms
is a characteristic of the radioactive element. The minus sign reflects the fact that the number of atoms ![]() decreases with time. Equation (8.11) is easily solved by separation of variables. We find
decreases with time. Equation (8.11) is easily solved by separation of variables. We find
![]() (8.12)
(8.12)
We now evaluate the indefinite integral of each side of the equation:
![]() (8.13)
(8.13)
The constant of integration is, in this case, determined by the initial condition: at time ![]() , there are
, there are ![]() atoms. Exponentiating, we obtain
atoms. Exponentiating, we obtain
![]() (8.14)
(8.14)
which is the famous equation for exponential decay. Radioactive elements are usually characterized by their half-life![]() , the time it takes for half the atoms to disintegrate. Setting
, the time it takes for half the atoms to disintegrate. Setting ![]() , we find the relation between half-life and decay constant:
, we find the relation between half-life and decay constant:
![]() (8.15)
(8.15)
The result for radioactive decay is easily adapted to describe organic growth, the rate at which the population of a bacterial culture will increase given unlimited nutrition.We simply change ![]() to
to ![]() in Eq. (8.11), which leads to exponential growth:
in Eq. (8.11), which leads to exponential growth:
![]() (8.16)
(8.16)
This remains valid until the source of nutrition runs out or the population density becomes intolerable.
A bimolecular chemical reaction such as ![]() often follows a rate law
often follows a rate law
![]() (8.17)
(8.17)
in which the increase in concentration of the reaction product C is proportional to the product (in the sense of ![]() ) of concentrations of the reactants A and B. To put this into more concrete form, assume that the initial concentrations at
) of concentrations of the reactants A and B. To put this into more concrete form, assume that the initial concentrations at ![]() are
are ![]() ,
, ![]() . At a later time
. At a later time ![]() , the concentration [C] grows to
, the concentration [C] grows to ![]() while [A] and [B] are reduced to
while [A] and [B] are reduced to ![]() . Equation (8.17) then reduces to
. Equation (8.17) then reduces to
![]() (8.18)
(8.18)
Separation of variables followed by integration gives
![]() (8.19)
(8.19)
Since ![]() when
when ![]() , the constant equals
, the constant equals ![]() and the solution can be written
and the solution can be written
![]() (8.20)
(8.20)
More challenging is the case when ![]() , different from
, different from ![]() . If you are adventurous, you can work out the solution
. If you are adventurous, you can work out the solution
![]() (8.21)
(8.21)
Problem 8.1.1
Find the solution to the differential equation
![]()
satisfying the boundary condition ![]() .
.
Problem 8.1.2
Solve the differential equation
![]()
You will need to introduce an integrating factor.
Bernoulli’s differential equation:
![]() (8.22)
(8.22)
is a well-known nonlinear equation that can be reduced to a linear equation. Multiplying by ![]() , we obtain
, we obtain
![]() (8.23)
(8.23)
This reduces to a linear equation in the variable ![]() :
:
![]() (8.24)
(8.24)
Using the integrating factor ![]() , the general solution, after reverting to the original variable
, the general solution, after reverting to the original variable ![]() , is given by
, is given by
![]() (8.25)
(8.25)
The equation is already linear if ![]() and separable, as well, if
and separable, as well, if ![]() .
.
8.2 Numerical Solutions
Numerical methods can be used to obtain approximate solutions for differential equations that cannot be treated analytically. The most rudimentary procedure for first-order equations is the Euler method. Not, in itself, very accurate it serves as a starting point for more advanced techniques. Suppose we seek a solution of a first-order equation of the form ![]() , subject to the boundary condition
, subject to the boundary condition ![]() . The first approximation for the value of
. The first approximation for the value of ![]() at the point
at the point ![]() might be suggested by the starting point in the definition of a derivative
might be suggested by the starting point in the definition of a derivative
![]() (8.26)
(8.26)
Choose a value for the size of each step between successive ![]() -values,
-values, ![]() , so that
, so that ![]() . Thus
. Thus ![]() . Each successive step in the Euler method is then determined by the recursive relations:
. Each successive step in the Euler method is then determined by the recursive relations:
![]() (8.27)
(8.27)
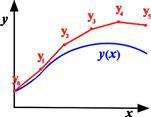
This procedure is illustrated by the chain of red1 segments in Figure 8.1, with the blue curve representing the hypothetical exact solution. Clearly, the accuracy degrades with increasing ![]() , although it can be improved by decreasing the interval size
, although it can be improved by decreasing the interval size ![]() .
.
Runge-Kutta methods provide more advanced approaches to numerical integration of ordinary differential equations. The most common variant, known as RK4, is an elaboration of the Euler method using four-term interpolations to determine successive points on the solution curve. Intermediate values of the functions ![]() between
between ![]() and
and ![]() enter into the computation of successive coefficients. The RK4 method is based on the following equations:
enter into the computation of successive coefficients. The RK4 method is based on the following equations:
![]() (8.28)
(8.28)
with
![]() (8.29)
(8.29)
![]() (8.30)
(8.30)
![]() (8.31)
(8.31)
![]() (8.32)
(8.32)
When ![]() is a function of
is a function of ![]() alone, the differential equation is essentially just an integration and the procedure reduces to Simpson’s rule. The RK4 method has an accumulated error of order
alone, the differential equation is essentially just an integration and the procedure reduces to Simpson’s rule. The RK4 method has an accumulated error of order ![]() , whereas the Euler method had an error which was first order in
, whereas the Euler method had an error which was first order in ![]() .
.
Mathematica is particularly adept at numerical solutions of differential equations, automatically choosing the most appropriate algorithm. For example, a first-order equation of the type discussed above can be programed using a command something like: NDSolve[{y[x]==…, y[a]==…},{x, a, b}] .
8.3 AC Circuits
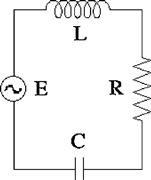
A number of instructive applications of differential equations concern alternating-current (AC) circuits containing resistance, inductance, capacitance and an oscillating voltage source, as represented in Figure 8.2. In the simplest case, consider a circuit with resistance ![]() and voltage (or emf)
and voltage (or emf) ![]() . The current
. The current ![]() is determined by Ohm’s law:
is determined by Ohm’s law:
![]() (8.33)
(8.33)
The standard units are amperes for ![]() , volts for
, volts for ![]() , and ohms for
, and ohms for ![]() . The other relevant units are henrys for
. The other relevant units are henrys for ![]() and farads for
and farads for ![]() . Ohm’s law is true even for an AC circuit, in which the voltage varies sinusoidally with time, say
. Ohm’s law is true even for an AC circuit, in which the voltage varies sinusoidally with time, say
![]() (8.34)
(8.34)
The current is then given by
![]() (8.35)
(8.35)
Thus the current through a resistance oscillates in phase with the voltage. The frequency ![]() is expressed in units of rad/s. It is more common to measure frequency
is expressed in units of rad/s. It is more common to measure frequency ![]() in cycles/s, a unit called the hertz (Hz). Since one cycle traces out
in cycles/s, a unit called the hertz (Hz). Since one cycle traces out ![]() radians, the two measures of frequency are related by
radians, the two measures of frequency are related by
![]() (8.36)
(8.36)
Thus your 60 Hz household voltage has an angular frequency of ![]() .
.
The voltage change across an inductance is given by ![]() . Thus for a circuit with inductance, but negligible resistance, the analog of Ohm’s law is
. Thus for a circuit with inductance, but negligible resistance, the analog of Ohm’s law is
![]() (8.37)
(8.37)
With an oscillating voltage (8.34), with an initial current ![]() , this equation is easily integrated to give
, this equation is easily integrated to give
![]() (8.38)
(8.38)
where the inductive reactance![]() has the same units as
has the same units as ![]() . For a DC voltage
. For a DC voltage ![]() , an inductor behaves just like an ordinary conductor. Note that the current in Eq. (8.38) is
, an inductor behaves just like an ordinary conductor. Note that the current in Eq. (8.38) is ![]() out of phase with the voltage
out of phase with the voltage ![]() . Specifically, for a pure inductance, the current lags the voltage by
. Specifically, for a pure inductance, the current lags the voltage by ![]() . Alternatively stated, the voltage leads the current by
. Alternatively stated, the voltage leads the current by ![]() . Physically, this reflects the fact that the inductor builds up an opposing emf (by Lenz’s law) in response to an increase in current.
. Physically, this reflects the fact that the inductor builds up an opposing emf (by Lenz’s law) in response to an increase in current.
For a circuit with capacitance ![]() , the relevant relation is
, the relevant relation is
![]() (8.39)
(8.39)
where ![]() (in coulombs) is the charge on the capacitor. In a DC circuit, no current passes through a capacitor. For an AC circuit, however, with the current being given by
(in coulombs) is the charge on the capacitor. In a DC circuit, no current passes through a capacitor. For an AC circuit, however, with the current being given by ![]() , we find
, we find
![]() (8.40)
(8.40)
For an AC voltage (8.34), the equation integrates to give
![]() (8.41)
(8.41)
where the capacitive reactance is defined by ![]() . This shows that for a pure capacitance, the current leads the voltage by
. This shows that for a pure capacitance, the current leads the voltage by ![]() . The mnemonic “ELI the ICEman” summarizes the phase relationships for inductance and capacitance: for
. The mnemonic “ELI the ICEman” summarizes the phase relationships for inductance and capacitance: for ![]() ,
, ![]() leads
leads ![]() while for
while for ![]() ,
, ![]() leads
leads ![]() .
.
In an electrical circuit with both resistance and inductance, the current and voltage are related by
![]() (8.42)
(8.42)
Suppose at time ![]() , while the current has the value
, while the current has the value ![]() , the voltage
, the voltage ![]() is suddenly turned off. With
is suddenly turned off. With ![]() , Eq. (8.42) reduces to the form of Eq. (8.11). Thus the current must decay exponentially with
, Eq. (8.42) reduces to the form of Eq. (8.11). Thus the current must decay exponentially with
![]() (8.43)
(8.43)
As a more challenging problem, let the circuit be powered by an AC voltage ![]() . Now (8.42) becomes an inhomogeneous equation.
. Now (8.42) becomes an inhomogeneous equation.
A very useful trick when dealing with quantities having sinusoidal dependence takes advantage of Euler’s theorem (4.57) in the form
![]() (8.44)
(8.44)
Note that
![]() (8.45)
(8.45)
Exponentials are much simpler to differentiate and integrate than sines and cosines. Suppose the AC voltage above is imagined to have a complex form ![]() . At the end of the computation, we take the real part of the resulting equation. The answer will be the same, as if we had used
. At the end of the computation, we take the real part of the resulting equation. The answer will be the same, as if we had used ![]() throughout. (A word of caution: make certain that the complexified functions occur only linearly in the equations.)
throughout. (A word of caution: make certain that the complexified functions occur only linearly in the equations.)
Accordingly, we write the circuit equation
![]() (8.46)
(8.46)
where ![]() is a complex variable representing the current. We can separate variables in this equation by introducing the integrating factor
is a complex variable representing the current. We can separate variables in this equation by introducing the integrating factor ![]() . Since
. Since
![]() (8.47)
(8.47)
Equation (8.46) reduces to
![]() (8.48)
(8.48)
Integration gives
![]() (8.49)
(8.49)
If we specify that ![]() when
when ![]() , we find
, we find
![]() (8.50)
(8.50)
The physically significant result is the real part:
![]() (8.51)
(8.51)
The last term represents a transient current, which damps out for ![]() . The terms which persist represent the steady-state solution. Note that in the DC limit, as
. The terms which persist represent the steady-state solution. Note that in the DC limit, as ![]() , the solution reduces to Ohm’s law
, the solution reduces to Ohm’s law ![]() . The steady-state solution can be rearranged to the form
. The steady-state solution can be rearranged to the form
![]() (8.52)
(8.52)
Here the impedance of the RL circuit is defined by ![]() while the phase shift
while the phase shift ![]() is given by
is given by ![]() .
.
The steady-state solution can be deduced directly from Eq. (8.46) by assuming from the outset that ![]() . The equation can then be readily solved to give
. The equation can then be readily solved to give
![]() (8.53)
(8.53)
which is equivalent to (8.50). One can also define a complex impedance ![]() , in terms of which we can write a complex generalization of Ohm’s law:
, in terms of which we can write a complex generalization of Ohm’s law:
![]() (8.54)
(8.54)
Circuits with ![]() ,
, ![]() , and
, and ![]() involve second-order differential equations, which is our next topic.
involve second-order differential equations, which is our next topic.
8.4 Second-Order Differential Equations
We will consider here linear second-order equations with constant coefficients, in which the functions ![]() and
and ![]() in Eq. (8.2) are constants. The more general case gives rise to special functions, several of which we will encounter later as solutions of partial differential equations. The homogeneous equation, with
in Eq. (8.2) are constants. The more general case gives rise to special functions, several of which we will encounter later as solutions of partial differential equations. The homogeneous equation, with ![]() , can be written
, can be written
![]() (8.55)
(8.55)
It is convenient to define the differential operator
![]() (8.56)
(8.56)
in terms of which
![]() (8.57)
(8.57)
The differential equation (8.55) is then written
![]() (8.58)
(8.58)
or, in factored form,
![]() (8.59)
(8.59)
where ![]() are the roots of the auxilliary equation
are the roots of the auxilliary equation
![]() (8.60)
(8.60)
The solutions of the two first-order equations
![]() (8.61)
(8.61)
give
![]() (8.62)
(8.62)
while
![]() (8.63)
(8.63)
gives
![]() (8.64)
(8.64)
Clearly, these are also solutions to Eq. (8.59). The general solution is the linear combination
![]() (8.65)
(8.65)
In the case that ![]() , one solution is apparently lost. We can recover a second solution by considering the limit:
, one solution is apparently lost. We can recover a second solution by considering the limit:
![]() (8.66)
(8.66)
(Remember that the partial derivative ![]() does the same thing as
does the same thing as ![]() , with every other variable held constant.) Thus the general solution for this case becomes
, with every other variable held constant.) Thus the general solution for this case becomes
![]() (8.67)
(8.67)
When ![]() and
and ![]() are imaginary numbers, say
are imaginary numbers, say ![]() and
and ![]() , the solution (8.65) contains complex exponentials. Since, by Euler’s theorem, these can be expressed as sums and difference of sine and cosine, we can write
, the solution (8.65) contains complex exponentials. Since, by Euler’s theorem, these can be expressed as sums and difference of sine and cosine, we can write
![]() (8.68)
(8.68)
Many applications in physics, chemistry, and engineering involve a simple differential equation, either
![]() (8.69)
(8.69)
The first equation has trigonometric solutions ![]() and
and ![]() , while the second has exponential solutions
, while the second has exponential solutions ![]() and
and ![]() . These results can be easily verified by “reverse engineering.” For example, assuming that
. These results can be easily verified by “reverse engineering.” For example, assuming that ![]() , then
, then ![]() and
and ![]() . It follows that
. It follows that ![]() .
.
8.5 Some Examples from Physics
Newton’s second law of motion in one dimension has the form
![]() (8.70)
(8.70)
where ![]() is the force on a particle of mass
is the force on a particle of mass ![]() ,
, ![]() is the acceleration, and
is the acceleration, and ![]() is the velocity. Newton’s law leads to a second-order differential equation, with the solution
is the velocity. Newton’s law leads to a second-order differential equation, with the solution ![]() determining the motion of the particle. The simplest case is a free particle, with
determining the motion of the particle. The simplest case is a free particle, with ![]() . Newton’s law then reduces to
. Newton’s law then reduces to
![]() (8.71)
(8.71)
The solution is
![]() (8.72)
(8.72)
in which ![]() and
and ![]() are the two constants of integration, representing, respectively, the initial
are the two constants of integration, representing, respectively, the initial ![]() position and velocity. Uniform linear motion at constant velocity
position and velocity. Uniform linear motion at constant velocity ![]() is also in accord with Newton’s first law of motion: a body in motion tends to remain in motion at constant velocity, unless acted upon by some external force.
is also in accord with Newton’s first law of motion: a body in motion tends to remain in motion at constant velocity, unless acted upon by some external force.
A slightly more general problem is motion under a constant force. An example is a body in free fall in the general vicinity of the Earth’s surface, which is subject to a constant downward force ![]() . Here
. Here ![]() (about 32 ft/s2), the acceleration of gravity. Denoting the altitude above the Earth’s surface by
(about 32 ft/s2), the acceleration of gravity. Denoting the altitude above the Earth’s surface by ![]() , we obtain the differential equation
, we obtain the differential equation
![]() (8.73)
(8.73)
The factors ![]() cancel. (This is actually a very profound result called the equivalence principle: the gravitational mass of a body equals its inertial mass. It is the starting point for Einstein’s General Theory of Relativity.) One integration of Eq. (8.73) gives
cancel. (This is actually a very profound result called the equivalence principle: the gravitational mass of a body equals its inertial mass. It is the starting point for Einstein’s General Theory of Relativity.) One integration of Eq. (8.73) gives
![]() (8.74)
(8.74)
where the constant of integration ![]() represents the initial velocity. A second integration gives
represents the initial velocity. A second integration gives
![]() (8.75)
(8.75)
where the second constant of integration ![]() represents the initial altitude. This solution is consistent with the well-known result that a falling body (neglecting air resistance) goes about 16 ft in 1 s, 64 ft after 2 s, and so on.
represents the initial altitude. This solution is consistent with the well-known result that a falling body (neglecting air resistance) goes about 16 ft in 1 s, 64 ft after 2 s, and so on.
The force exerted by a metal spring subject to moderate stretching or compression is given approximately by Hooke’s law
![]() (8.76)
(8.76)
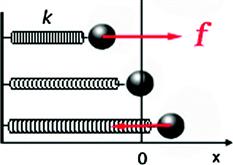
Here ![]() represents the displacement, positive or negative, from the spring’s equilibrium extension, as shown in Figure 8.3. The force constant
represents the displacement, positive or negative, from the spring’s equilibrium extension, as shown in Figure 8.3. The force constant![]() is a measure of the spring’s stiffness. The minus sign reflects the fact that the force is in the opposite direction to the displacement—a spring will resist equally either stretching and compression. Consider now a mass
is a measure of the spring’s stiffness. The minus sign reflects the fact that the force is in the opposite direction to the displacement—a spring will resist equally either stretching and compression. Consider now a mass ![]() connected to a spring with force constant
connected to a spring with force constant ![]() . Assume for simplicity that the mass of the spring itself is negligible compared to
. Assume for simplicity that the mass of the spring itself is negligible compared to ![]() . Newton’s second law for this idealized system leads to the differential equation
. Newton’s second law for this idealized system leads to the differential equation
![]() (8.77)
(8.77)
The auxilliary equation (8.60) is
![]() (8.78)
(8.78)
with roots
![]() (8.79)
(8.79)
Thus the solution is a linear combination of complex exponentials
![]() (8.80)
(8.80)
Alternatively,
![]() (8.81)
(8.81)
This shows that the spring oscillates sinusoidally with a natural frequency![]() . Sinusoidal oscillation is also called harmonic motion and the idealized system is referred to as a harmonic oscillator. If necessary, the two constants of integration can be determined by the initial displacement and velocity of the oscillating mass.
. Sinusoidal oscillation is also called harmonic motion and the idealized system is referred to as a harmonic oscillator. If necessary, the two constants of integration can be determined by the initial displacement and velocity of the oscillating mass.
Another form for the solution (8.81) can be obtained by setting ![]() . We find then
. We find then
![]() (8.82)
(8.82)
An alternative possibility is ![]() .
.
The oscillation of a real spring will eventually be damped out, in the absence of external driving forces. A reasonable approximation for damping is a force retarding the motion which is proportional to the instantaneous velocity: ![]() , where
, where ![]() is called the damping constant. The differential equation for a damped harmonic oscillator can be written
is called the damping constant. The differential equation for a damped harmonic oscillator can be written
![]() (8.83)
(8.83)
where ![]() . The auxilliary equation has the roots
. The auxilliary equation has the roots ![]() so that the general solution can be written:
so that the general solution can be written:
![]() (8.84)
(8.84)
For cases in which damping is not too extreme, so that ![]() , the square roots are imaginary. The solution (8.84) can be written in the form
, the square roots are imaginary. The solution (8.84) can be written in the form
![]() (8.85)
(8.85)
This represents a damped sinusoidal wave, as shown in Figure 8.4. For stronger damping, such that ![]() ,
, ![]() decreases exponentially with no oscillation.
decreases exponentially with no oscillation.

A damped Hooke’s-law system subject to forced oscillations at frequency ![]() can be represented by an inhomogeneous differential equation:
can be represented by an inhomogeneous differential equation:
![]() (8.86)
(8.86)
Again it is useful to assume a complex exponential driving force ![]() . If we seek, as before, just the steady-state solutions to (8.86), the complex form
. If we seek, as before, just the steady-state solutions to (8.86), the complex form ![]() can be substituted for
can be substituted for ![]() . This reduces (8.86) to an algebraic equation for
. This reduces (8.86) to an algebraic equation for ![]() :
:
![]() (8.87)
(8.87)
with
![]() (8.88)
(8.88)
The steady-state solution is then given by
![]() (8.89)
(8.89)
or, more compactly,
![]() (8.90)
(8.90)
where
![]() (8.91)
(8.91)
It can be seen that, after transients die out, the forced oscillation impresses its frequency ![]() on the system, apart from a phase shift
on the system, apart from a phase shift ![]() . If this frequency matches the natural frequency of the oscillator,
. If this frequency matches the natural frequency of the oscillator, ![]() , the system is said to be in resonance. The amplitude of the oscillation then reaches a maximum. At resonance,
, the system is said to be in resonance. The amplitude of the oscillation then reaches a maximum. At resonance, ![]() , so that the oscillator’s motion is
, so that the oscillator’s motion is ![]() out of phase with the forcing function.
out of phase with the forcing function.
The behavior of an RLC circuit (Figure 8.2) is closely analogous to that of an oscillating spring. The circuit equation (8.42) generalizes to
![]() (8.92)
(8.92)
Taking the time derivative leads to a more useful form:
![]() (8.93)
(8.93)
recalling that ![]() . To obtain the steady-state solution, we assume the complex forms
. To obtain the steady-state solution, we assume the complex forms ![]() and
and ![]() . Equation (8.93) then reduces to an algebraic equation
. Equation (8.93) then reduces to an algebraic equation
![]() (8.94)
(8.94)
The result is most compactly expressed in terms of the impedance:
 (8.95)
(8.95)
Here ![]() is the reactance of the circuit, equal to the difference between inductive and capacitive reactance:
is the reactance of the circuit, equal to the difference between inductive and capacitive reactance:
![]() (8.96)
(8.96)
In terms of the complex impedance
![]() (8.97)
(8.97)
Equation (8.94) can be solved for
![]() (8.98)
(8.98)
Therefore the physical value of the current is given by
![]() (8.99)
(8.99)
The resonance frequency for an RLC circuit is determined by the condition
![]() (8.100)
(8.100)
At resonance, ![]() ,
, ![]() , and
, and ![]() . The inductive and capacitive reactances exactly cancel so that the impedance reduces to a pure resistance. Thus the current is maximized and oscillates in phase with the voltage. In a circuit designed to detect electromagnetic waves (e.g. radio or television signals) of a given frequency, the inductance and capacitance are “tuned” to satisfy the appropriate resonance condition.
. The inductive and capacitive reactances exactly cancel so that the impedance reduces to a pure resistance. Thus the current is maximized and oscillates in phase with the voltage. In a circuit designed to detect electromagnetic waves (e.g. radio or television signals) of a given frequency, the inductance and capacitance are “tuned” to satisfy the appropriate resonance condition.
8.6 Boundary Conditions
Often, the boundary conditions imposed on a differential equation determine significant aspects of its solutions. We consider two examples involving the one-dimensional Schrödinger equation in quantum mechanics:
![]() (8.101)
(8.101)
It will turn out that boundary conditions determine the values of ![]() , the allowed energy levels for a quantum system. A particle-in-a-box is a hypothetical system with a potential energy given by
, the allowed energy levels for a quantum system. A particle-in-a-box is a hypothetical system with a potential energy given by
![]() (8.102)
(8.102)
Because of the infinite potential nergy, the wavefunction ![]() outside the box, where
outside the box, where ![]() or
or ![]() . This provides two boundary conditions
. This provides two boundary conditions
![]() (8.103)
(8.103)
for the Schrödinger eqution inside the box, which can be written in the familiar form
![]() (8.104)
(8.104)
where
![]() (8.105)
(8.105)
The general solution to (8.104) can be written
![]() (8.106)
(8.106)
Imposing the boundary condition at ![]()
![]() (8.107)
(8.107)
which reduces the general solution to
![]() (8.108)
(8.108)
The boundary condition at ![]() implies
implies
![]() (8.109)
(8.109)
We can’t just set ![]() because that would imply
because that would imply ![]() everywhere. Recall, however, that the sine function periodically goes through 0, when its argument equals
everywhere. Recall, however, that the sine function periodically goes through 0, when its argument equals ![]() Therefore the second boundary condition can satisfied if
Therefore the second boundary condition can satisfied if
![]() (8.110)
(8.110)
This implies that ![]() and, by (8.105), the allowed values of the energy are then given by
and, by (8.105), the allowed values of the energy are then given by
![]() (8.111)
(8.111)
where the integer ![]() is called a quantum number. Quantization of energy in a bound quantum system is thus shown to be a consequence of boundary conditions imposed on the Schrödinger equation. The wavefunction corresponding to the energy
is called a quantum number. Quantization of energy in a bound quantum system is thus shown to be a consequence of boundary conditions imposed on the Schrödinger equation. The wavefunction corresponding to the energy ![]() is given by
is given by
![]() (8.112)
(8.112)
Setting ![]() , we obtain wavefunctions fulfilling the normalization condition:
, we obtain wavefunctions fulfilling the normalization condition:
![]() (8.113)
(8.113)
Problem 8.6.1
Redo the analysis of the same problem with the alternative boundary conditions:
![]()
For a free particle in quantum mechanics, ![]() everywhere. The Schrödinger equation (8.104) still applies, but now with no restrictive boundary conditions. Any value of
everywhere. The Schrödinger equation (8.104) still applies, but now with no restrictive boundary conditions. Any value of ![]() is allowed
is allowed ![]() and thus
and thus ![]() . There is no quantization of energy for a free particle. The wavefunction is conventionally written
. There is no quantization of energy for a free particle. The wavefunction is conventionally written
![]() (8.114)
(8.114)
with ![]() [
[![]() ] corresponding to a particle moving to the right [left]. It is convenient, for bookkeeping purposes to impose periodic boundary conditions, such that
] corresponding to a particle moving to the right [left]. It is convenient, for bookkeeping purposes to impose periodic boundary conditions, such that
![]() (8.115)
(8.115)
This requires that
![]() (8.116)
(8.116)
which is satisfied if
![]() (8.117)
(8.117)
This implies an artificial quantization of ![]() with
with
![]() (8.118)
(8.118)
But, since L can be arbitrarily chosen, all values of ![]() are allowed. With the constant in Eq. (8.114) set equal to
are allowed. With the constant in Eq. (8.114) set equal to ![]() , the wavefunction obeys the box normalization condition
, the wavefunction obeys the box normalization condition
![]() (8.119)
(8.119)
More generally, since the functions ![]() and
and ![]() are orthogonal for
are orthogonal for ![]() , we can write
, we can write
![]() (8.120)
(8.120)
in terms of the Kronecker delta (7.78). The functions ![]() thus constitute an orthonormal set.
thus constitute an orthonormal set.
8.7 Series Solutions
A very general method for obtaining solutions to second-order differential equations is to expand ![]() in a power series and then evaluate the coefficients term by term. We will illustrate the method with a trivial example which we have already solved, namely the equation with constant coefficients:
in a power series and then evaluate the coefficients term by term. We will illustrate the method with a trivial example which we have already solved, namely the equation with constant coefficients:
![]() (8.121)
(8.121)
Assume that ![]() can be expanded in a power series about
can be expanded in a power series about ![]() :
:
![]() (8.122)
(8.122)
The first derivative is given by
![]() (8.123)
(8.123)
We have redefined the summation index in order to retain the dependence on ![]() . Analogously,
. Analogously,
![]() (8.124)
(8.124)
Equation (8.121) then implies
![]() (8.125)
(8.125)
Since this is true for all values of ![]() , every quantity in square brackets must equal zero. This leads to the recursion relation
, every quantity in square brackets must equal zero. This leads to the recursion relation
![]() (8.126)
(8.126)
Let ![]() be treated as one constant of integration. We then find
be treated as one constant of integration. We then find
![]() (8.127)
(8.127)
It is convenient to rewrite the coefficient ![]() as
as ![]() . We find thereby
. We find thereby
![]() (8.128)
(8.128)
The general power-series solution of the differential equation is thus given by
 (8.129)
(8.129)
which is recognized as the expansion for
![]() (8.130)
(8.130)
We consider next the more general case of a linear homogeneous second-order differential equation with nonconstant coefficients:
![]() (8.131)
(8.131)
If the functions ![]() and
and ![]() are both finite at
are both finite at ![]() , then
, then ![]() is called a regular point of the differential equation. If either
is called a regular point of the differential equation. If either ![]() or
or ![]() diverges as
diverges as ![]() , then
, then ![]() is called a singular point. If both
is called a singular point. If both ![]() and
and ![]() have finite limits as
have finite limits as ![]() , then
, then ![]() is called a regular singular point or nonessential singularity. If either of these limits continues to diverge, the point is an essential singularity.
is called a regular singular point or nonessential singularity. If either of these limits continues to diverge, the point is an essential singularity.
For regular singular points, a series solution of the differential equation can be obtained by the method of Frobenius. This is based on the following generalization of the power-series expansion:
![]() (8.132)
(8.132)
The derivatives are then given by
![]() (8.133)
(8.133)
and
![]() (8.134)
(8.134)
The possible values of ![]() are obtained from the indicial equation, which is based on the presumption that
are obtained from the indicial equation, which is based on the presumption that ![]() is the first nonzero coefficient in the series (8.132).
is the first nonzero coefficient in the series (8.132).
8.8 Bessel Functions
In later work we will encounter Bessel’s differential equation:
![]() (8.135)
(8.135)
one of the classics of mathematical physics. Bessel’s equation occurs, in particular, in a number of applications involving cylindrical coordinates. Dividing the standard form (8.135) by ![]() shows that
shows that ![]() is a regular singular point of Bessel’s equation. The method of Frobenius is thus applicable. Substituting the power-series expansion (8.132) into (8.135), we obtain
is a regular singular point of Bessel’s equation. The method of Frobenius is thus applicable. Substituting the power-series expansion (8.132) into (8.135), we obtain
![]() (8.136)
(8.136)
This leads to the recursion relation
![]() (8.137)
(8.137)
Setting ![]() in the recursion relation and noting that
in the recursion relation and noting that ![]() (
(![]() is the first nonvanishing coefficient), we obtain the indicial equation
is the first nonvanishing coefficient), we obtain the indicial equation
![]() (8.138)
(8.138)
The roots are ![]() . With the choice
. With the choice ![]() , the recursion relation simplifies to
, the recursion relation simplifies to
![]() (8.139)
(8.139)
Since ![]() ,
, ![]() (assuming
(assuming ![]() ). Likewise
). Likewise ![]() , as do all odd
, as do all odd ![]() . For even
. For even ![]() , we have
, we have
![]() (8.140)
(8.140)
For ![]() , the coefficients can be represented by
, the coefficients can be represented by
![]() (8.141)
(8.141)
From now on, we will use the compact notation
![]() (8.142)
(8.142)
Setting ![]() , we obtain the conventional definition of a Bessel function of the first kind:
, we obtain the conventional definition of a Bessel function of the first kind:
![]() (8.143)
(8.143)
The first three Bessel functions are plotted in Figure 8.5. Their general behavior can be characterized as damped oscillation, qualitatively similar to that in Figure 8.4.

Bessel functions can be generalized for noninteger index ![]() , as follows:
, as follows:
![]() (8.144)
(8.144)
The general solution of Bessel’s differential equation for noninteger ![]() is given by
is given by
![]() (8.145)
(8.145)
For integer ![]() , however,
, however,
![]() (8.146)
(8.146)
so that ![]() is not a linearly independent solution. Following the strategy used in Eq. (8.158), we can construct a second solution by defining
is not a linearly independent solution. Following the strategy used in Eq. (8.158), we can construct a second solution by defining
![]() (8.147)
(8.147)
In the limit as ![]() approaches an integer
approaches an integer ![]() , we obtain
, we obtain
![]() (8.148)
(8.148)
This defines a Bessel function of the second kind (sometimes called a Neumann function and written ![]() ). The computational details are horrible, but fortunately, mathematicians have worked them all out for us and these functions have been extensively tabulated. Figure 8.6 shows the first three functions
). The computational details are horrible, but fortunately, mathematicians have worked them all out for us and these functions have been extensively tabulated. Figure 8.6 shows the first three functions ![]() .
.

The limiting behavior of the ![]() as
as ![]() is apparent from the leading term
is apparent from the leading term ![]() . Using the definition (8.148) we find
. Using the definition (8.148) we find
![]() (8.149)
(8.149)
Figure 8.6 shows the logarithmic singularities as ![]() .
.
8.9 Second Solution
We have encountered two cases in which one solution of a second-order differential equation is relatively straightforward, but the second solution is more obscure. There is a systematic procedure for determining the second solution once the first is known.
Recall that two functions ![]() and
and ![]() are linearly independent if the relation
are linearly independent if the relation
![]() (8.150)
(8.150)
can only be fulfilled when ![]() . A test for linear independence is that the Wronskian,
. A test for linear independence is that the Wronskian, ![]() , of the two functions is not equal to zero:
, of the two functions is not equal to zero:
![]() (8.151)
(8.151)
If we did have ![]() , then
, then ![]() , which would imply that
, which would imply that ![]() , thus negating linear independence.
, thus negating linear independence.
Assume that ![]() and
and ![]() are linearly independent solutions to the second-order differential equation (8.131). We can then write
are linearly independent solutions to the second-order differential equation (8.131). We can then write
![]() (8.152)
(8.152)
Multiplying the first equation by ![]() , the second by
, the second by ![]() and subtracting, we find
and subtracting, we find
![]() (8.153)
(8.153)
The second bracket is recognized as the Wronskian ![]() , while the first bracket equals
, while the first bracket equals ![]() . Thus
. Thus
![]() (8.154)
(8.154)
Separation of variables gives
![]() (8.155)
(8.155)
Thus
![]() (8.156)
(8.156)
![]() (8.157)
(8.157)
which can be solved for ![]() to give
to give
![]() (8.158)
(8.158)
For example, suppose we know one solution ![]() for
for ![]() . Noting that
. Noting that ![]() , we can find the second solution
, we can find the second solution
![]() (8.159)
(8.159)
Again, for the differential equation ![]() or, more explicitly,
or, more explicitly,
![]() (8.160)
(8.160)
there is one obvious solution, ![]() . Noting that
. Noting that ![]() , the second solution follows from
, the second solution follows from
![]() (8.161)
(8.161)
The second solution of Bessel’s equation (8.135) for integer ![]() can be found from (8.158) with
can be found from (8.158) with ![]() :
:
![]() (8.162)
(8.162)
An expansion for ![]() can be obtained after calculating a power series for
can be obtained after calculating a power series for ![]() .
.
8.10 Eigenvalue Problems
An operator, designated here by ![]() , represents an action which transforms one function into another function. For the case of functions of a single variable:
, represents an action which transforms one function into another function. For the case of functions of a single variable:
![]() (8.163)
(8.163)
We have already encountered the differential operator ![]() in Section 8.3. In a sense, an operator is a generalization of the concept of a function, which transforms one number into another. For the Schrödinger equation in Eq. (8.101), one can define the Hamiltonian operator by
in Section 8.3. In a sense, an operator is a generalization of the concept of a function, which transforms one number into another. For the Schrödinger equation in Eq. (8.101), one can define the Hamiltonian operator by
![]() (8.164)
(8.164)
The Schrödinger equation can then be written more compactly as
![]() (8.165)
(8.165)
where E is the energy of the quantum system. As we have seen in Section 8.6, the boundary conditions of the problem determine a set of allowed energies ![]() and corresponding wavefunctions
and corresponding wavefunctions ![]() . These are known as eigenvalues and eigenfunctions, respectively. In pure English these are called “characteristic values” and “characteristic functions,” respectively. The corresponding German terms are eigenwert and eigenfunktion. Current usage employs a hybrid of the English and German words, namely eigenvalue and eigenfunction.
. These are known as eigenvalues and eigenfunctions, respectively. In pure English these are called “characteristic values” and “characteristic functions,” respectively. The corresponding German terms are eigenwert and eigenfunktion. Current usage employs a hybrid of the English and German words, namely eigenvalue and eigenfunction.
All operators in quantum mechanics which correspond to observable quantities must be Hermitian, such that
![]() (8.166)
(8.166)
where ![]() and
and ![]() obey the same analyticity and boundary conditions that are imposed on the eigenfunctions.
obey the same analyticity and boundary conditions that are imposed on the eigenfunctions.
The allowed set of eigenvalues and eigenfunctions obtained for some Schrödingier equation can be summarized symbolically by
![]() (8.167)
(8.167)
For another solution, we can write
![]() (8.168)
(8.168)
Now multiply the first equation by ![]() and the complex conjugate of the second equation by
and the complex conjugate of the second equation by ![]() . Then subtract the two expressions and integrate over
. Then subtract the two expressions and integrate over ![]() . The result can be written
. The result can be written
![]() (8.169)
(8.169)
But by the presumed Hermitian property of H, the left-hand side equals zero. Thus
![]() (8.170)
(8.170)
If ![]() , the second factor becomes
, the second factor becomes ![]() , which is nonzero. Therefore the first factor must equal zero, meaning that
, which is nonzero. Therefore the first factor must equal zero, meaning that
![]() (8.171)
(8.171)
Thus the energy eigenvalues must be real numbers, which is reasonable, given that they are measurable physical quantities.
Next consider the case when ![]() . Then it must be the second factor in Eq. (8.170) that equals zero:
. Then it must be the second factor in Eq. (8.170) that equals zero:
![]() (8.172)
(8.172)
Thus eigenfunctions belonging to unequal eigenvalues are orthogonal. There remains the case that for some ![]() ,
, ![]() . The eigenfunctions
. The eigenfunctions ![]() and
and ![]() are then said to be degenerate. But it is always possible to construct linear combinations of degenerate eigenfunctions so that the orthogonality relation still applies. If the eigenfunctions are, in addition, all normalized, we obtain the compact orthonormality condition
are then said to be degenerate. But it is always possible to construct linear combinations of degenerate eigenfunctions so that the orthogonality relation still applies. If the eigenfunctions are, in addition, all normalized, we obtain the compact orthonormality condition
![]() (8.173)
(8.173)
1For interpretation of color in Figure 8.1, the reader is referred to the web version of this book.