
We have all had the experience of trying to figure out whether police and fire sirens are headed toward us or away. A siren coming closer will seem have a higher pitch than one going away.
The change in pitch is called the Doppler effect , and the actual change in frequency is called the Doppler shift. It is named for Austrian mathematician and physicist Christian Doppler (1803–1853), who is credited for proposing it. It turns out that the Doppler effect applies to light waves as well as sound. Light from a source that is moving toward you has its frequency shifted higher, and light from something moving away shifts lower. One of the more exotic uses of this phenomenon is to track the movement of distant galaxies that are moving away from us.
Another Austrian who built on Doppler’s work was Ernst Mach (1838–1916), a physicist and philosopher. His early work was focused on the Doppler effect in both optics and acoustics, not to mention philosophy ( https://plato.stanford.edu/entries/ernst-mach ). He is credited with taking the first photographs of bullets in flight and managing to capture an image of a shock wave—a jump in pressure—that builds up ahead of something moving faster than the speed of sound. The way that shock wave builds up is closely related to the Doppler effect. We explore both of these phenomena in this chapter.
Doppler Effect
Imagine that a police car is driving away from you, siren blaring, pursuing a bad guy at 77 miles an hour. The speed of sound in air at sea level is about 340 meters per second, or 767 miles an hour. Thus the police car is driving away from you at about 10% of the speed of sound.
Now think about the sound waves from the siren spreading out as it moves. Because the car is moving at 10% of the speed of those waves, you can imagine the waves starting to pile up in front of the car because the siren keeps wailing while the car catches up to the sound it made before. Behind the car, on the other hand, the waves the siren has made are stretched out. The pitch of a sound is higher when the sound waves are closer together, and lower when they are more spread out.
Figure 4-1 shows a model of the waves generated by something putting out sound at a particular pitch while moving at 30% the speed of sound. Figure 4-2 shows a snapshot of the waves from a source at 80% the speed of sound. We have not included a model for the 10% speed of sound example because of the resolution of our model—it is pretty hard to see the effects of changes that small.

Figure 4-1. Waves from a source moving to the right at 30% of the speed of sound

Figure 4-2. Waves from a source moving to the right at 80% of the speed of sound
Frequency Shift
The shifted frequency an observer hears from something moving toward them at a velocity v is determined by the equation
Shifted frequency = (1 + v / a) * ( frequency at rest)
where a is the speed of sound . If the source of the sound is moving away, the frequency changes like this:
Shifted frequency = (1 – v / a) * ( frequency at rest)
Think about the waves bunching up and getting closer together as the source moves toward you. The frequency rises as the distance between subsequent waves gets smaller.
The ratio of a moving object’s velocity to the speed of sound (the v / a term in the shifted frequency equation) is called the Mach number, commonly denoted by M. It is named in honor of Mach, but was not defined by him.
The speed of sound depends on the temperature of the air (or other gas) that is carrying the sound waves, and ambient density and pressure, all of which are interrelated. Warmer air will transmit the small physical disturbance of a sound wave from molecule to molecule faster. The molecules in hot, dense air are flying around faster and will more efficiently propagate a sound wave. For example, in the cold, thin air up where commercial airliners fly, at 10 kilometers (32,800 feet) above mean sea level, the speed of sound slows to 667 miles per hour from the 767 at sea level—a 13% decrease.
The Model
This model is based on the wave model in our earlier book 3D Printed Science Projects (Apress, 2016; Chapter 2, “Light and Other Waves”). That model ultimately needs to get a set of points to plot out a 3D surface. In this case, because the source is moving, we need to work backwards from a point in x and y and figure out what wave would be passing over that point at a particular time.
We think about this by imagining that we are taking a snapshot at one particular time of all the waves that have been generated by our moving point source since it came into our field of view. Imagine that as the point source was flying along it puffed out a smoke ring on a regular basis. The oldest smoke rings would be the biggest, and the new ones the smallest. Instead of single smoke rings, though, we imagine our source is putting out a cosine wave at a particular frequency.
The waves from the moving source are traveling at the speed of sound. So we know that a wave that arrives at a particular point was generated by a source that was at the center of that circle at a time in the past. We can calculate that time by dividing the radius of the circle by the speed of sound. Figure 4-3 shows this situation, and we will work through the math to show you how we got our equations. We want to find A, the radius from where the wave (now at point (x,y)) started back when the disturbance was at P1. We show the point where the source is now as (0,0).
Figure 4-3. Geometry to figure out which wave contributes to the amplitude at a particular point (x,y) at a particular snapshot in time
We think of the object flying from P1 to the current origin of its coordinate system in space, (0,0). We want to find the distance A in Figure 4-3 that is the distance of the posiition of the source when the wave was generated to the point (x,y).
We know the following to start with (based on the diagram in Figure 4-3):
Our object creating the disturbance went from P1 to (0,0) moving at Mach number M.
The radius from the current position to the point (x,y)—we call this R.
The angle theta, which is the angle with tangent y / x.
That the angles in a triangle sum to 180 degrees.
That B / A equals the Mach number M since the object moved M times the speed of sound times the time while the disturbance (moving at the speed of sound) moved from P1 to (x,y).
To work out the math, we will use the law of sines, which says that for all the angles in a triangle, the ratios of the sine of all their angles to their opposite sides is equal. In this case, that would be:
sin(theta) / A = sin(b) / B = sin(r) / R
Since we know that B/A = M, use the relationships between the first two sides to get:
sin(theta) / A = sin(b) / MA (substituting MA for B)
Therefore, b = asin(M * sin(theta))
Next we need to get the third angle, r. Since the angles in a triangle add up to 180 degrees,
180 = theta + asin(M * sin(theta)) + r
or
r = 180 – theta – asin(M * sin(theta))
Going back to the original law of sines, we know that the angles theta and r are related like this:
sin(theta) / A = sin(r) / R
or
A = sin (theta) * R / sin (r)
Finally, to get A (which is what we wanted all along) we plug in the values we have found to get:
A = sin (theta) * R /
sin (180 – theta – asin(M * sin(theta)))
This is a peak of the cosine wave that was generated at P1 in the past. The speed of the disturbance is Mach number times speed of sound. We are creating this whole snapshot at one (arbitrary) time, and so you can see that the actual values of time drop out in the algebra we just worked out.
Finally, we use that value of amplitude * cos(A*frequency) as the height of our wave at position (x,y) at our arbitrary time. Whew!
Caution
This model only applies below Mach 1. Beyond that, the source will outrun the waves, and the part of a new wave that is emitted behind the source will interfere (constructively and destructively) with the part of an old wave that was emitted forward. This form of the equation does not include that interference. It will have other problems, including one that results in what is called a non-manifold model for Mach numbers greater than or equal to 1. These models can cause problems for 3D printer software.
Listing 4-1. The Doppler Model
// File doppler.scad// An OpenSCAD model of a snapshot of the waves// around a moving object// The model is based on the waves models in// Volume 1 of 3D Printed Science Projects// Rich "Whosawhatsis" Cameron, December 2016// Units: lengths in mm, angles in degrees// per OpenSCAD conventions// This program creates a res*xmax mm by res*ymax rectangle// As shown here will be 100 mm square.// Model only valid for subsonic objects(mach < 1)mach = .5; // mach number – must be less than 1.0frequency = 20; // frequency - increase to show more waves// setting frequency to high for the mach number will// result in sampling artifactsamplitude = .5; // Height of wave peaks on either side of the base plane, mmthick = 2; // thickness of the slab, mmxmax = 199; // max dimension in x (before scaling by res)ymax = 199; //max dimension in x (before scaling by res)res = .5; // scaling factor// This function calculates a cosine wave with doppler shift:function f(x, y) = amplitude * cos(r(x, y) / sin(theta(x, y) + asin(sin(theta(x, y)) * mach)) * sin(theta(x, y)) * frequency);// These two functions convert x/y values to polar coordinates:function r(x, y, center = [xmax/2, ymax/2]) = sqrt(pow(center[0] - x, 2) + pow(center[1] - y, 2));function theta(x, y, center = [xmax/2, ymax/2]) = atan2((center[1] - y), (center[0] - x));// The rest of the model is the same as the// wave model in Volume 1.// It creates and interpolates a surface z = f(x,y)// 3D printer conventions are that z is vertical –// The model is rotated at the end// so that the (x, y) surface is vertical, not horizontal// This gives better print quality and allows for a wave// surface on both sides of a print// without supporttoppoints = (xmax + 1) * (ymax + 1);center = [xmax/2, ymax / 2];points = concat(// top face[for(y = [0:ymax], x = [0:xmax]) [x, y, f(x, y)]],(thick ? //bottom face[for(y = [0:ymax], x = [0:xmax]) [x, y, f(x, y) - thick]]:[for(y = [0:ymax], x = [0:xmax]) [x, y, 0]]));zbounds = [min([for(i = points) i[2]]),max([for(i = points) i[2]])];function quad(a, b, c, d, r = false) = r ?[[a, b, c], [c, d, a]]:[[c, b, a], [a, d, c]]; //create triangles from quadfaces = concat(//build top and bottom[for(bottom = [0, toppoints],i = [for(x = [0:xmax - 1],y = [0:ymax - 1])quad(x + (xmax + 1) * (y + 1) + bottom,x + (xmax + 1) * y + bottom,x + 1 + (xmax + 1) * y + bottom,x + 1 + (xmax + 1) * (y + 1) + bottom,bottom)], v = i) v],//build left and right[for(i = [for(x = [0, xmax], y = [0:ymax - 1])quad(x + (xmax + 1) * y + toppoints,x + (xmax + 1) * y,x + (xmax + 1) * (y + 1),x + (xmax + 1) * (y + 1) + toppoints,x)], v = i) v],//build front and back[for(i = [for(x = [0:xmax - 1], y = [0, ymax])quad(x + (xmax + 1) * y + toppoints,x + 1 + (xmax + 1) * y + toppoints,x + 1 + (xmax + 1) * y,x + (xmax + 1) * y,y)], v = i) v]);// prevent an incorrect model from being generatedif(1 > mach && mach > -1) {// Scale and rotate the printrotate([90, 0, 0]) scale([res, res, 1]) {polyhedron(points, faces);}} else echo("mach number must be less than 1");// end model
Printing and Changing the Model
As you saw in Figure 4-2, this model prints vertically—otherwise you would need to pick a lot of support off the model, and the waves would not print as cleanly. Because the model is very thin, we recommend against scaling it in your slicing software. Instead, change anything you want to in OpenSCAD. You can scale the model by changing the variable res, which multiplies the default size of 200 mm on a side (res = 0.5 gives you 100 mm square pieces).
You can change the variable frequency to change the frequency of the wave the moving object is creating. The variable mach is the Mach number, which should be less than 1 for this model.
Mach Cone
Scientists associate Ernst Mach with several fundamental ideas, including Mach’s principle, which laid out some ideas about how to think about motion that you can see relative to motions of far away objects, like the stars. Einstein depended on those ideas for his theory of general relativity later on. The biography Einstein: A Hundred Years of Relativity by Andrew Robinson (Princeton University Press: 2015) has some wonderful stories about how the young Einstein spent a lot of time studying Mach’s work, and about how the two even met at one point.
More directly applicable to our discussion here is that Mach became interested in Doppler’s work (a fellow Austrian) and started studying the implications of it. He became interested in the cases when something was moving faster than the speed of sound. He and a colleague pulled off the impressive feat (particularly for 1887) of photographing the waves generated by a bullet moving faster than the speed of sound.
He observed that the bullet creates a conical shock wave that moves with the bullet. In our era of supersonic aircraft, we call these shock waves sonic booms when they cross our path on the ground, and they are the extreme example of the bunching up of waves we saw in the previous section. Here, the object is moving so fast that it is catching up to and passing through the disturbances it is generating.
Shock Waves
Imagine that a plane is flying supersonically and making noise. The noise it made a second ago will be spreading out in a sphere, but the plane will have punched through that outer spreading sphere and moved on before the sphere gets there. This creates a shock wave angled away from the nose of plane at the Mach angle, which is an angle with a sine that is the reciprocal of the Mach number. At Mach 3, this is asin(1 / 3), or about 19 degrees. The Mach cone’s front will be twice the Mach angle, which you can verify from our models.
The Model
Our 3D printed model is shown in Figure 4-4 for a subsonic (Mach 0.5), transonic (Mach 1), and supersonic (Mach 3) case in which the vehicle is flying to the right of the picture at a 30-degree angle from the vertical.
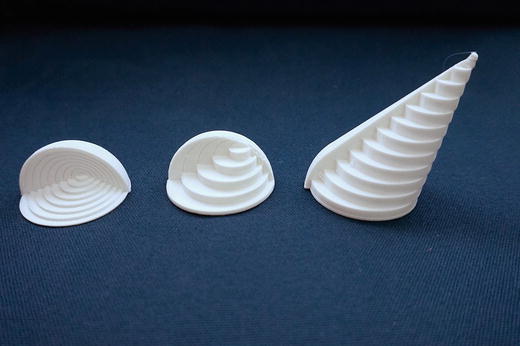
Figure 4-4. Mach cone models for Mach 0.5, 1, and 3
Note
Transonic is the term for situations right around Mach 1, when we are transitioning from subsonic (below Mach 1) to supersonic (above it).
The model (Listing 4-2) is created by first making two spheres: one centered at the first modeled time with a radius that is the distance sound travels between that first modeled time and the current time, and a second sphere that is centered where the disturbance was just before its current position. OpenSCAD’s hull() function is used to create a surface that contains these spheres and all the intermediate ones. This creates a smooth surface away from the stair steps that shows what the outer boundary of the sound traveling away would look like. The stair steps are cuts through the diameter of spheres at regular intervals along the direction of travel.
Note
For Mach 1 and below, the traveling source has not outrun the oldest propagating sound wave, and so the outside is a sphere.
Figure 4-5 shows a different view of this envelope of the edge of the propagating waves for a supersonic point source moving to the right of the picture. We have shown both the 2D propagation of the edge of the disturbance from the moving point source (the circles) and the surface that defines the edge of all the disturbances if we made the steps between circles smaller and smaller.
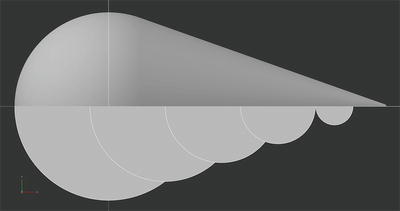
Figure 4-5. 2D projection of the Mach cone
Caution
The bottom (largest) circle of the models should not be thought of as the ground cutting through a shock wave of something flying above it. The largest circle is just the radius of the disturbance from where we started keeping track of it.
Listing 4-2. The Mach Cone Model
// File machCone.scad// An OpenSCAD model of a snapshot// of the propagating disturbance// From a point source moving at mach number, "mach"// The model prints a disk that is a cross-section of// the sphere representing a propagating disturbance// from the traveling point source// and a surface that is the envelope of// the boundary of these propagating spheres// Assumes point source at constant velocity// Rich "Whosawhatsis" Cameron, December 2016// Units: lengths in mm, angles in degrees,// per OpenSCAD conventionsmach = 0.5; // mach numbersize = 50; // diameter of the oldest propagation circle, in mma = 30; // angle from the vertical at which// the point source is travelingstep = 3; // size of the circular cross-section steps$fs = 2; // decrease this for smoother curves.// This will slow down rendering.$fa = 2;// First section creates the outer boundary created by// smoothing spheres of propagating// disturbance as the point source movesdifference() {intersection() {hull() for(i = [1, size / 2]) {translate([sin(a), 0, cos(a)] * (size / 2 - i) * mach)sphere(r = i);}translate([-size, 0, 0]) cube(size * 10);}if(mach < = 1) for(i = [5:step:size / 2]) {translate([sin(a), 0, cos(a)] * (size / 2 - i) * mach) {rotate([90, 0, 0]) {linear_extrude(2, center = true) difference() {circle(i);circle(i - .2);}}}}} // end difference// Next create the stair steps representing the diameter of// propagation circlesintersection() {for(i = [0:step:size / 2 + step]) {translate([sin(a), 0, cos(a)] * (size / 2 - i) * mach) {cylinder(r = i,h = step * mach * cos(a) + .01,center = true);}}translate([-size, -size * 10, 0]) cube(size * 10);}// end model
Printing and Changing the Model
As with the Doppler model, we suggest you do not scale this model down with your printer’s scaling; change anything you want to in the model itself by changing the variable size, which is the diameter of the largest (bottom) circle in mm. The variable mach is the Mach number. Scaling it up should work, although you may see some of the facets of the approximations making up the model if you scale it too much outside of OpenSCAD.
Where to Learn More
The topics in this chapter are typically covered at the undergraduate college level, although they are certainly good fodder for more advanced K-12 physics students and their science fair projects. As such, we relied heavily on Joan’s college textbooks for key numbers and equations.
For standard atmosphere values of the speed of sound and background on Mach numbers, we relied on the textbook Foundations of Aerodynamics, 3rd edition (Wiley, 1976) by Kuethe and Chow. It looks like a 5th edition was published in 1997. For more details on the physics of the Doppler effect, we used Morse and Ingard’s Theoretical Acoustics (McGraw-Hill, 1968).
We did not explictly go into light waves here, but you can read about the Doppler shift applied to light if you look up “redshift ” ( https://en.wikipedia.org/wiki/Redshift ) or “expansion of the universe.” The universe is expanding, and so all galaxies are flying away from each other in a way that makes light from them seem shifted toward the red end of the spectrum (that is, waves from them get stretched farther apart, sort of like the descending pitch when a sound is moving away). However, light is not as straightforward to model as sound because of relativistic effects—how a situation “looks” for moving light sources depends on where and when you are observing.
Teaching with These Models
As we noted in the last section, these topics are most commonly covered in undergraduate or graduate physics courses. However, these models might be interesting to include as talking points when teaching the concept of waves in general, for instance under the Next Generation Science Standards (NGSS) HS-PS4-1, “Use mathematical representations to support a claim regarding relationships among the frequency, wavelength, and speed of waves traveling in various media” ( www.nextgenscience.org/pe/hs-ps4-1-waves-and-their-applications-technologies-information-transfer ). More general discussions of sound waves and perhaps of other periodic functions could also be supported using these models as visualizations of interesting test cases.
Project Ideas
These models are visualizations (models meant to give you intuition). However, you can change the Mach number and frequency. In the case of the Doppler plots, raising the frequency in essence raises the resolution of the plot, to a point. If you raise it too far, you will start to create artifacts, since the models are (by default) just 199 points across in each dimension. If you lower it too much, you may be zoomed in too far to see more than a wave or two, and you will not see the Doppler effect then either. The same is true for the step size in the Mach cone models.
For the same reason, be careful about scaling these models down in your printer software. They may get too thin to print vertically, or develop artifacts in the prints of the waves.
With all that said, you might find it interesting to print each of the models in this chapter for a few Mach numbers and several frequencies to build your intution about how these effects look in 2D snapshots (the first model) and in 3D. Remember, though, that the Doppler model (Listing 4-1) must be used only below Mach 1.
You also might look at what the equivalent models would look like for light. We did not embark on them because of the complications that ensue when you think about relativisitic effects.
Summary
This chapter discusses sound waves created by moving objects. The first model visualizes the Doppler-shifted waves created by something moving through air or another medium at speeds below the speed of sound. The second model is a little more general. It looks at 3D snapshots of the outer boundary of disturbances caused by objects moving either above or below the speed of sound. Above the speed of sound, these disturbances create a Mach cone around themselves, which separates where the disturbance from the moving object has propagated from where it has not. We conclude with some ideas about how to use these models to build intuition.