
CHAPTER 8
INTRODUCTION
Item tagging and monitoring have become significant than ever before, due to the recent emergence of new technologies and their mass-market penetration. Particularly in mass production sites, automated item tagging can increase the productivity and efficiency, which in turn will increase the company revenue. Optical barcode technology is dominant in the item tagging market at present due to its relatively low implementation cost. However, there are a number of limitations such as low reading range, line of sight (LOS) requirement for reading, and its inability to identify multiple items simultaneously. All these challenges suggest barcodes is not a feasible solution in automating item tagging. Radio frequency identification (RFID) shades the light to overcome these limitations toward automating the process, however with high-priced tags. The focus of this research is to produce tags that are comparable to optical barcodes in price, while providing the functionality. This is achieved by removing the microchip and using special techniques hence, called chipless RFID tags. This section of the book presents a few advanced tag detection techniques and a high-data-capacity chipless tag using likelihood-based detection techniques and multiple input multiple output (MIMO) tag design.
8.1 RFID SYSTEMS
RFID is a wireless technology used to automatically identify objects attached to its tags. RFID technology appears to offer as an alternative to optical barcodes due to its unique advantages such as larger reading range, non-LOS reading, multiple tag detection, and its ability to be able to automate the item identification process. A typical RFID system has a reader, a tag, and middleware [1] as shown in Figure 8.1. The RFID reader sends an interrogating signal, which is an electromagnetic (EM) signal, toward the tag and the tag responds back with embedded information to the reader's receiver. Then the reader extracts the information originally encoded by the tag and utilizes the middleware to interface that with the user in a meaningful manner. RFID systems have applications in a number of areas including inventory control, security, logistics, and itemtracking.
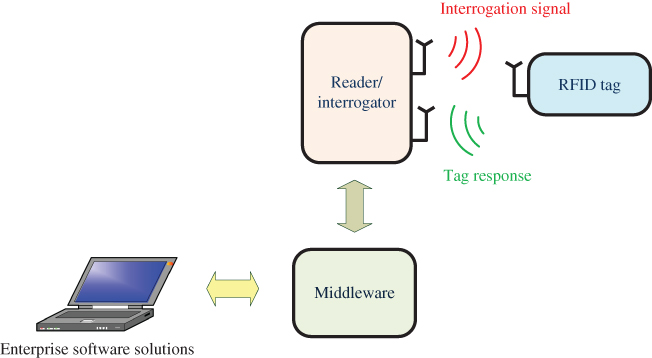
Figure 8.1 A typical RFID system.
The RFID reader usually transmits an interrogating signal toward the RFID tag. The tag then modulates the signal with its ID codes and retransmits or backscatters the modulated signal toward the reader. This process is called tag modulation. Different modulation techniques are discussed later in the book. The response from the tag is then analyzed to detect and uniquely identify the tag using the signal processing capabilities at the reader. Finally, the middleware integrates the tag identification data with an enterprise software to facilitate the automation process [2].
A vast majority of commercially available RFID tags use application-specific integrated circuits (ASICs) to encode and transmit data. This microchip in the RFID tag makes the tag manufacturing process complicated and expensive compared to optical barcode printing. Researchers have proposed the idea of removing the microchip and using new data encoding techniques. These chipless RFID tags can be printed on paper, read non-LOS, fabricated at low cost, and made fully passive without requiring any energy source [3].
A number of RFID systems have been reported in the literature [1, 3–35], which are based on either chipped or chipless RFID tags. In chipped RFID systems, a reasonable amount of processing is done at the tag with the help of a microchip. However, in chipless RFID systems, the tag is given a minimum, if not nil, processing capabilities, as the RFID reader takes all the burden of signal processing. A brief summary of evolution of both single input single output (SISO) and MIMO-based RFID systems is presented next.
8.1.1 SISO-Based RFID Systems
Early research on RFID systems was mainly based on systems having a single antenna at the tag, and also a single antenna at the reader hence named as SISO systems. Since separate antennas for transmission and reception at the reader as well as at the tag enhance the system performance [36, 37], researchers proposed multiple antennas at the RFID tags and/or at the RFID readers. It is noteworthy that there is only one dedicated transmission antenna or receiving antenna. These SISO systems can be seen in both chipped and chipless RFID tags proposed in the literature.
However, chipless RFID technologies have still not been able to replace optical barcoding or chipped RFID tags mainly due to lower data capacity, reading range, and tag reading accuracy. Over the last decade, researchers have mainly focused on overcoming these challenges by improving the chipless RFID tag design and the RFID reader architecture [2, 3, 38–41]. However, they were mostly using primitive signal processing techniques such as moving average or threshold-based detection [42–44]. The few advanced signal processing techniques [45–50] reported so farhave high computation complexity; hence, they are not feasible for commercial implementation. It was identified that there is a significant research gap for computationally feasible smart tag detection techniques for chipless RFID systems.
This section of the book addresses the identified research gap and hypothesizes likelihood-based detection techniques for accurate tag detection. The techniques also improve data capacity by removing the guard bands between resonant frequencies of the frequency-domain chipless RFID tags. They also increase the read range by requiring low signal-to-noise ratio (SNR) in detected signals. Then the tag reading was made faster with computationally feasible tag detection techniques such as trellis-tree-based Viterbi decoding and bit-by-bit suboptimal approaches.
8.1.2 MIMO-Based RFID Systems
The rapid development of RFID devices and their wide use in mass market applications have prompted researchers to work mainly on improving RFID system performances. The performance metrics include interrogation range, bit-error-rate (BER), data rate, anticollision, and implementation cost. In wireless communication, most of these performance metrics have been improved using MIMO antenna technology. As a result, during the last few years, there has been a significant research focus on applying MIMO technology to chipped RFID systems. The most important MIMO-based chipped RFID systems reported in the literature are revisited here.
Chizhik et al. [51] introduced the concept of pinhole/keyhole when describing the capacities of multielement transmit and receive antennas. The formulation of a pinhole can be visualized in the following example. Picture a two-element transmitting array and a two-element receiving array that are separated by a screen with a small keyhole/pinhole punched through it. The only way for the radio wave to propagate is to pass through the pinhole. A hallway or a tunnel is perhaps a more realistic environment where the pinhole concept can be experienced. In Ref. [36], Griffin has shown that pinhole diversity is available in a rich scattering environment caused by the modulating backscatter with multiple RF-tag antennas.
In Ref. [37], a ultrahigh frequency (UHF)-chipped RFID system has been investigated with multiple readers, where the channel from transmitter to the receiver of the reader, via the RFID tag, was assumed to be a pinhole channel. Both forward (from the reader to tag) and reverse (from the tag to reader) links are assumed to be having a Nakagami-m fading channel [52]. An ![]() pinhole channel has been investigated further, where there are
pinhole channel has been investigated further, where there are ![]() transmitting reader antennas, one RF-tag antenna, and
transmitting reader antennas, one RF-tag antenna, and ![]() receiving antennas at the reader. There are two system configurations analyzed in this work, namely, monostatic system with transmit and receive antennas to be collocated at the readerand bistatic system with reader transmit and receive antennas to be spaced far apart.
receiving antennas at the reader. There are two system configurations analyzed in this work, namely, monostatic system with transmit and receive antennas to be collocated at the readerand bistatic system with reader transmit and receive antennas to be spaced far apart.
It was observed in Ref. [37] that the average reverse-link interrogation range will be large when monostatic structure is used instead of bistatic structure. However, in rich scattering environments, the bistatic structures are more reliable than the monostatic. In most cases, MIMO system has outperformed its SISO counterpart. For example, ![]() MIMO-RFID can achieve 60% extra gain in average reverse-link interrogation range compared to that of SISO-RFID system. The reasons could be the exploitation of pinhole diversity and improved SNR received at the reader with multiple antennas. In this work, the main concern was to improve the range rather than identifying multiple tags.
MIMO-RFID can achieve 60% extra gain in average reverse-link interrogation range compared to that of SISO-RFID system. The reasons could be the exploitation of pinhole diversity and improved SNR received at the reader with multiple antennas. In this work, the main concern was to improve the range rather than identifying multiple tags.
In Ref. [53], Langwieser developed a UHF front end for MIMO applications in RFID. Passive chipped RFID tag has been used for the experiment with one transmitting antenna and two receiving antennas at the reader. Using the measured data, it was claimed that transmit and receive beamforming as well as tag localization can be performed using their front end.
The gains available for chipped RFID tags using multiple antennas are discussed in Ref. [36]. In conventional MIMO, the environment should have rich scattering to exploit spatial multiplexing. In line with that, one can conclude that LOS is not in favor of spatial multiplexing. Even though RFID system channels exhibit LOS propagation, heavy small-scale fading will be present due to indoor operation, a cluttered reader environment, and inhomogeneous nature of the tagged objects [36]. They have studied about an ![]() dyadic backscatter channel, which is a pinhole channel that describes the backscatter propagation radio channel with
dyadic backscatter channel, which is a pinhole channel that describes the backscatter propagation radio channel with ![]() transmitter antennas,
transmitter antennas, ![]() RFID tag antennas, and
RFID tag antennas, and ![]() receiver antennas. This channel was investigated first by Ingram et al. [54] with multiple antennas to exploit transmit diversity and spatial multiplexing to increase the range and communication capacity.
receiver antennas. This channel was investigated first by Ingram et al. [54] with multiple antennas to exploit transmit diversity and spatial multiplexing to increase the range and communication capacity.
In Ref. [36], it was shown that the dyadic backscatter channel has deeper fades than that of the one-way Rayleigh channel but improves as more RFID tag antennas are added. However, pinhole diversity has two advantages over both conventional coherent diversity combining and noncoherent diversity combining. First, it changes the channel distribution to have comparatively less fading. Moreover, diversity gains can be realized in the dyadic backscatter channel using only multiple RFID tag antennas to modulate the backscatter. Hence, no diversity combining is required at the reader, making no changes in the reader receiver hardware, reader transmitter hardware, or signaling scheme. In fact, the actual communication gain in the above dyadic backscatter channel is due to both pinhole diversity gain and increased scattering aperture. In addition, if conventional diversity combining techniques such as maximum ratio combining (MRC) are employed at the reader, even greater gain is achievable. However, it is important to notice that antenna correlation at the tag has to be at a minimum as possible to explore maximum pinhole diversity.
After reviewing the above MIMO-based chipped RFID systems, the following system characteristics were identified. They can be used as design guidelines when developing a MIMO-based chipless RFID system.
- Multiple RF-Tag Antennas. Each antenna of the tag can be used to modulate the interrogating signal.
- Bistatic Reader Architecture. Therefore separate antennas for transmitter and receiver.
- Antenna Arrays Instead of A Signal Antenna. Multiple diversity branches are available.
- Operating Frequency. It should be high enough so that a feasible uncorrelated antenna element spacing at the tag can be achievable.
- Antennas Configuration. Cross-polarized antennas may be used at the reader to reduce self-interference and at the tag to reduce envelop correlation between the signals scattered from each tag antenna. However, using cross-polarized antennas can lead to detrimental effects of unequal diversity branch power.
It is evident that MIMO-based chipped RFID systems have a number of advantages compared to their SISO counterparts. Although they achieve diversity gains from employing multiple antennas, they utilize a microchip in the tag to encode data. The microchip incurs high implementation costs as well as an energy source to power the microchip is needed. Therefore, they do not provide a feasible alternative for optical barcoding that is currently utilized in most mass production item tagging. Chipless RFID systems, on the other hand, do not contain a microchip hence less implementation cost. This is a significant advantage in mass production item tagging. However, there is no reported literature on MIMO-based chipless RFID systems to date except the authors' work in [55]. Thus, there is a need to develop MIMO-based chipless RFID systems that have the potential to replace optical barcode systems used in mass production item tagging.
8.2 REVIEW OF CHIPLESS RFID TAG DETECTION TECHNIQUES
A number of tag detection techniques for chipless RFID systems have been reported. This section summarizes some of the available techniques and compares them in terms of detection accuracy and computation complexity.
The multiresonator-based chipless RFID system presented in Ref. [43] uses a threshold-based tag detection technique, where magnitude of the tag response at resonating frequencies is compared against a threshold level to identify the tag bits. Similar techniques are applied in the chipless RFID systems proposed in Refs [41, 44, 56–58]. There have been reported tag detection techniques such as Refs [59] and [46], purely based on phase information of the received signal. It was mentioned that information embedded in phase allows to reduce the transmit power compared to magnitude-based detection techniques.
The tag detection performances were able to improve by utilizing a moving average filtering technique in Ref. [42]. The chipless RFID systems proposed in Refs [50, 60] utilize both magnitude and phase information for decision making. Utilizing information embedded on both magnitude and phase allows the tag reading to be highly reliable. However, the complete tag detection algorithm was not reported and amalgamating information available in both the magnitude and phase is not known. In addition, a detailed analysis on the performance of the tag detection technique needs to be performed.
The tag detection techniques discussed so far use simple signal processing techniques such as threshold-based detection [43] combined with moving average [42]. The tag detection proposed in Ref. [49] presents an advanced tag detection technique using a continuous wavelet transform. It has managed to overcome the difficulty to detect the signal scattered at the tags with the delay information in the presence of noise. The wavelet transform effectively acts as a matched filter and one benefit of this technique is that a reference tag is not required in advance.
There have been other advanced tag detection techniques such as signal space representation (SSR) reported in Refs [47, 61]. The basic principle is to map the received signal vector into a point in an ![]() -dimensional space. All possible tag responses are mapped into fixed points in the
-dimensional space. All possible tag responses are mapped into fixed points in the ![]() -dimensional space and the minimum distance between the received signal point and other fixed points is calculated to identify the tag bit combination. This is a very accurate technique and it has shown improved performance in successful tag detection. However, one of the challenges is its exponential computation complexity as the number of data bits increases. For example, 20 bit tags have about 1 million unique combinations and the 1 million distances need to be calculated before making a decision.
-dimensional space and the minimum distance between the received signal point and other fixed points is calculated to identify the tag bit combination. This is a very accurate technique and it has shown improved performance in successful tag detection. However, one of the challenges is its exponential computation complexity as the number of data bits increases. For example, 20 bit tags have about 1 million unique combinations and the 1 million distances need to be calculated before making a decision.
There have been other techniques reported in Refs [45, 48, 62–72] using techniques similar to those mentioned earlier. The main limitation of the existing techniques is its low tag reading reliability mostly because of the primitive tag detection techniques used. The advanced tag detection techniques have been able to achieve robust tag reading, however suffer from high computation complexity. Therefore, the motivation is to develop advanced tag detection techniques that can achieve reliable tag reading with relatively low computation complexity. This book presents a maximum likelihood (ML) detection technique with less computationcomplexity. The following section reviews ML techniques reported in the literature.
8.3 MAXIMUM LIKELIHOOD DETECTION TECHNIQUES
ML detection is a signal processing technique used in communication systems to make decisions by observing a received signal and comparing it with all the possible combinations. An optimal ML detection technique utilizes all aspects of the received signal before making a decision. A suboptimal likelihood detector would use only the main aspects of the received signal such as the magnitude while discarding the phase. Generally, ML-based detection techniques have a very high accuracy. Therefore, ML detection techniques are widely used in communication systems. However, the main drawback is high computation complexity and as a result they are not scalable.
There are a few differences on signals available in communication systems compared to that in a chipless RFID environment. A comparison of the environment available in a communication system and a typical chipless RFID system at 2.4 GHz is shown in Table 8.1.
Table 8.1 Comparison of Communication System with a Chipless RFID System
| Metric | Communication System | Chipless RFID System |
| Transmitter & receiver | Separated | Colocated |
| Interference | Intersymbol interference (ISI) | Interresonator interference (IRI) |
| Bandwidth | Narrowband ( |
Broadband ( |
| Channel | Multipath propagation | Strong light of sight |
| Propagation distance | Up to many kilometers | |
| Spectral efficiency | Several bits per second per Hertz |
Signals considered in communication systems are generated based on the modulated bits. Since bits in communication systems are random, the generated signals are also random in nature. On the other hand, tag signals have a limited number of data bits and as a result they can be interrogated multiple times for a higher reading reliability without compromising the reading time. It is similar to a signal obtained by repeating the same bit sequence in a communication system.
Even though the transmitter and receiver are physically separated in communication systems, they are colocated in chipless RFID systems. As a result, the receiver has access to the interrogating signal; hence, a perfect synchronization can be achievable. In communication systems, modulated signals can have intersymbol interference (ISI) due to channel delay spread. However, in frequency domain chipless RFID systems, a bit is modulated using a resonator and its response can interfere with the neighboring resonator responses creating inter-resonator interference (IRI).
Bandwidth in chipless RFID systems are quite high (![]() MHz) compared to that of communication systems. As a result, noise level can be expected to be quite high. However, due to short-range operation (
MHz) compared to that of communication systems. As a result, noise level can be expected to be quite high. However, due to short-range operation (![]() m) of chipless RFID systems, the received signal power is relatively higher, thanks to the strong LOS presented. Another important observation is the extremely low spectral efficiency of chipless RFID systems as shown in Table 8.1. This is mainly due to the fact that chipless tags have no computation resources and this passive tag designing is deliberately made to be simple. On the other hand, the number of data bits required to transmit is extremely low compared to that of a communication system.
m) of chipless RFID systems, the received signal power is relatively higher, thanks to the strong LOS presented. Another important observation is the extremely low spectral efficiency of chipless RFID systems as shown in Table 8.1. This is mainly due to the fact that chipless tags have no computation resources and this passive tag designing is deliberately made to be simple. On the other hand, the number of data bits required to transmit is extremely low compared to that of a communication system.
The understanding of ML detection techniques and the differences in two environments was utilized in proposing likelihood-based detection techniques presented in Chapter 10.
8.4 CONCLUSIONS
A literature survey was carried out in three main categories. The chapter first summarized the available chipless RFID tag types, and multiresonator-based chipless tags were identified as a potential tag type for further investigation. Two tag designs are presented in Chapter 9. Then, available chipped MIMO systems were studied and the main takeaways were discussed. The importance of having multiple antennas both at the tag and the reader was highlighted. Orthogonal antenna configuration is identified as an important aspect when designing a chipless RFID system having multiple antennas. In addition, the operating frequency should be selected such that the uncorrelated antenna element spacing is achievable. These findings will be used in proposing the novel MIMO-based chipless RFID system. Finally, the available tag detection techniques for chipless RFID tag reading were presented and their advantages and limitations were identified. ML-based detection techniques used in communication systems were discussed and difference aspects were compared under a chipless RFID system environment. It was identified that IRI caused is similar to ISI when the resonating frequencies are close to each other in communication systems. Therefore, techniques used in communication systems to mitigate ISI can help in designing tags, which increases data bit capacity in chipless tags. Therefore, the motivation is to remove the guard bands presented between resonance frequencies and mitigate the interference using signal processing techniques at the reader.
In the following chapter, various chipless RFID tag designs and reading methods are presented. Then, the subsequent chapters present the proposed likelihood-based detection techniques of these chipless RFID tags and their tag reading accuracy improvement. At the end of Part II, MIMO signal processing for chipless RFID is presented followed by a chapter focusing on applications of the presented detection techniques.
REFERENCES
- 1. K. Finkenzeller, RFID Handbook: Fundamentals and Applications in Contactless Smart Cards and Identification, 2nd ed. New York, NY, USA: John Wiley & Sons, Inc., 2003.
- 2. S. Preradovic and N. Karmakar, Modern RFID readers, 2007 (accessed December 24, 2014). [Online]. Available: http://www.microwavejournal.com/articles/5271-modern-rfid-readers.
- 3. S. Preradovic and N. Karmakar, “Chipless RFID: bar code of the future”, IEEE Microwave Magazine, vol. 11, no. 7, pp. 87–97, Dec 2010.
- 4. U. Kaiser and W. Steinhagen, “A low power transponder IC for high performance identification systems,” in Custom Integrated Circuits Conference, 1994., Proceedings of the IEEE 1994, San Diego, CA, USA, May 1994, pp. 335–338.
- 5. S. Preradovic, S. Roy, and N. Karmakar, “RFID system based on fully printable chipless tag for Paper-/Plastic-ltem tagging,” IEEE Antennas and Propagation Magazine, vol. 53, no. 5, pp. 15–32, Oct 2011.
- 6. F. Kamoun, “RFID system management: state-of-the art and open research issues,” IEEE Transactions on Network and Service Management, vol. 6, no. 3, pp. 190–205, Sept 2009.
- 7. X. Chen, W. G. Yeoh, Y. B. Choi, H. Li, and R. Singh, “A 2.45-GHz near-field RFID system with passive On-Chip antenna tags,” IEEE Transactions on Microwave Theory and Techniques, vol. 56, no. 6, pp. 1397–1404, June 2008.
- 8. A. Shameli, A. Safarian, A. Rofougaran, M. Rofougaran, J. Castaneda, and F. De Flaviis, “A UHF near-field RFID system with fully integrated transponder,” IEEE Transactions on Microwave Theory and Techniques, vol. 56, no. 5, pp. 1267–1277, May 2008.
- 9. A. Athalye, V. Savic, M. Bolic, and P. Djuric, “Novel semi-passive RFID system for indoor localization,” IEEE Sensors Journal, vol. 13, no. 2, pp. 528–537, Feb 2013.
- 10. Y. Weng, S. Cheung, T. Yuk, and L. Liu, “Design of chipless UWB RFID system using A CPW multi-resonator,” IEEE Antennas and Propagation Magazine, vol. 55, no. 1, pp. 13–31, Feb 2013.
- 11. C. Floerkemeier and S. Sarma, “An overview of RFID system interfaces and reader protocols,” in RFID, 2008 IEEE International Conference on, April 2008, pp. 232–240.
- 12. H. Song, Y. Zhao, and H. Lan, “Multi-channel active RFID system for IoT application,” in Measurement, Information and Control (MIC), 2012 International Conference on, vol. 2, May 2012, pp. 568–571.
- 13. G. Fritz, V. Beroulle, M. Nguyen, O. Aktouf, and I. Parissis, “Read-error-rate evaluation for RFID system on-line testing,” in Mixed-Signals, Sensors and Systems Test Workshop (IMS3TW), 2010 IEEE 16th International, June 2010, pp. 1–6.
- 14. S. Sabesan, M. Crisp, R. Penty, and I. White, “An error free passive UHF RFID system using a new form of wireless signal distribution,” in RFID (RFID), 2012 IEEE International Conference on, April 2012, pp. 58–65.
- 15. S. Ma, Y. Zhang, and D. Wang, “Distributed work flow system for RFID integration and application,” in Information, Computing and Telecommunication, 2009. YC-ICT '09. IEEE Youth Conference on, Sept 2009, pp. 62–65.
- 16. S. Mirshahi, S. Uysal, and A. Akbari, “Integration of RFID and WSN for supply chain intelligence system,” in Electronics, Computers and Artificial Intelligence (ECAI), 2013 International Conference on, June 2013, pp. 1–6.
- 17. R. Falk, F. Kohlmayer, A. Koepf, M. Braun, H. Seuschek, and M. Li, “Application of passive asymmetric RFID tags in a high-assurance avionics multi-domain RFID processing system,” in RFID Systems and Technologies (RFID SysTech), 2008 4th European Workshop on, June 2008, pp. 1–7.
- 18. S.-K. Youm, J.-H. Kim, and S.-K. Cho, “A study on the methodology for testing of RFID system at library,” in Multimedia and Ubiquitous Engineering, 2007. MUE '07. International Conference on, April 2007, pp. 1076–1079.
- 19. I. Mun, A. Kantrowitz, P. Carmel, K. Mason, and D. Engels, “Active RFID system augmented with 2D barcode for asset management in a hospital setting,” in RFID, 2007. IEEE International Conference on, March 2007, pp. 205–211.
- 20. A. Fawky, M. Mohammed, M. El-Hadidy, and T. Kaiser, “UWB chipless RFID system performance based on real world 3D-deterministic channel model and ZF equalization,” in Antennas and Propagation (EuCAP), 2014 8th European Conference on, April 2014, pp. 1765–1768.
- 21. Z. J. Guo, “Research on test technology of RFID system,” in Control and Decision Conference (CCDC), 2013 25th Chinese, May 2013, pp. 2793–2796.
- 22. K. Kozlowski, L. Kulas, and K. Nyka, “New RFID readers for scalable RFID system,” in Information Technology (ICIT), 2010 2nd International Conference on, June 2010, pp. 95–98.
- 23. N. Aziz, I. Alias, A. Hashim, R. Mustafa, K. Anuar, S. Ahmad, and W. Muhamad, “Smart RFID system for oil palm bio-laboratory,” in RF and Microwave Conference, 2008. RFM 2008. IEEE International, Dec 2008, pp. 247–251.
- 24. S.-Y. Chan, S.-W. Luan, J.-H. Teng, and M.-C. Tsai, “Design and implementation of a RFID-based power meter and outage recording system,” in Sustainable Energy Technologies, 2008. ICSET 2008. IEEE International Conference on, Nov 2008, pp. 750–754.
- 25. C.-T. Huang, S.-J. Wang, W.-L. Wang, and Y.-S. Wang, “Construction of an online RFID enabled supply chain system reliability monitoring model,” in Computer, Consumer and Control (IS3C), 2012 International Symposium on, June 2012, pp. 626–629.
- 26. M. Nassih, I. Cherradi, Y. Maghous, B. Ouriaghli, and Y. Salih-Alj, “Obstacles recognition system for the blind people using RFID,” in Next Generation Mobile Applications, Services and Technologies (NGMAST), 2012 6th International Conference on, Sept 2012, pp. 60–63.
- 27. J.-S. Cho, S.-C. Kim, and S.-S. Yeo, “RFID system security analysis, response strategies and research directions,” in Parallel and Distributed Processing with Applications Workshops (ISPAW), 2011 Ninth IEEE International Symposium on, May 2011, pp. 371–376.
- 28. Y. Zuo, “Survivable RFID systems: issues, challenges, and techniques,” IEEE Transactions on Systems, Man, and Cybernetics, Part C: Applications and Reviews, vol. 40, no. 4, pp. 406–418, July 2010.
- 29. E. Hagras, “Interleave division multiple access; robust anti-collision protocol for UWB RFID system in non-Gaussian impulsive channel,” in Radio Science Conference (NRSC), 2014 31st National, April 2014, pp. 202–209.
- 30. Z. Al-Amir, F. Al-Saidi, and H. Abdulkadir, “Design and implementation of RFID system,” in Systems, Signals and Devices, 2008. IEEE SSD 2008. 5th International Multi-Conference on, July 2008, pp. 1–6.
- 31. M. Mubarak, J. Manan, and S. Yahya, “Trusted anonymizer-based RFID system with integrity verification,” in Information Assurance and Security (IAS), 2011 7th International Conference on, Dec 2011, pp. 98–103.
- 32. A. Bhattacharjya and R. Pal, “Distributed design of universal lightweight RFID system for large-scale RFID operation,” in Business Innovation and Technology Management (APBITM), 2011 IEEE International Summer Conference of Asia Pacific, July 2011, pp. 40–44.
- 33. S. Sabesan, M. Crisp, R. Penty, and I. White, “Wide area passive UHF RFID system using antenna diversity combined with phase and frequency hopping,” IEEE Transactions on Antennas and Propagation, vol. 62, no. 2, pp. 878–888, Feb 2014.
- 34. D.-G. Min, J.-W. Kim, and M.-S. Jun, “The entrance authentication system in real-time using face extraction and the RFID tag,” in Ubiquitous Computing and Multimedia Applications (UCMA), 2011 International Conference on, April 2011, pp. 20–24.
- 35. H. Cheng, W. Ni, and N. Li, “A systematic scheme for designing RFID systems with high object detection reliability,” in Information Science, Electronics and Electrical Engineering (ISEEE), 2014 International Conference on, vol. 3, April 2014, pp. 1521–1526.
- 36. J. Griffin and G. Durgin, “Gains for RF tags using multiple antennas,” IEEE Transactions on Antennas and Propagation, vol. 56, no. 2, pp. 563–570, Feb 2008.
- 37. D.-Y. Kim, H.-S. Jo, H. Yoon, C. Mun, B.-J. Jang, and J.-G. Yook, “Reverse-link interrogation range of a UHF MIMO-RFID system in Nakagami- m fading channels,” IEEE Transactions on Industrial Electronics, vol. 57, no. 4, pp. 1468–1477, April 2010.
- 38. N. Saldanha and D. Malocha, “Low loss SAW RF ID tags for space applications,” in Ultrasonics Symposium, 2008. IUS 2008. IEEE, Beijing, China, Nov 2008, pp. 292–295.
- 39. N. I. of Advanced Industrial Science and T. (AIST), Printing of organic thin-film transistor arrays on flexible substrates, 2008 (accessed December 24, 2014). [Online]. Available: http://www.idtechex.com/research/reports/rfid_forecasts_players_and_opportunities_2006_2016_000137.asp.
- 40. J. Vemagiri, A. Chamarti, M. Agarwal, and K. Varahramyan, “Transmission line delay-based radio frequency identification (RFID) tag,” Microwave and Optical Technology Letters, vol. 49, no. 8, pp. 1900–1904, 2007.
- 41. A. Vena, E. Moradi, K. Koski, A. Babar, L. Sydanheimo, L. Ukkonen, and M. Tentzeris, “Design and realization of stretchable sewn chipless RFID tags and sensors for wearable applications,” in RFID (RFID), 2013 IEEE International Conference on, April 2013, pp. 176–183.
- 42. R. Koswatta and N. Karmakar, “Moving average filtering technique for signal processing in digital section of UWB chipless RFID reader,” in Microwave Conference Proceedings (APMC), 2010 Asia-Pacific, Dec 2010, pp. 1304–1307.
- 43. S. Preradovic, I. Balbin, N. Karmakar, and G. Swiegers, “Multiresonator-based chipless RFID system for low-cost item tracking,” IEEE Transactions on Microwave Theory and Techniques, vol. 57, no. 5, pp. 1411–1419, May 2009.
- 44. M. Bhuiyan and N. Karmakar, “Chipless RFID tag based on split-wheel resonators,” in Antennas and Propagation (EuCAP), 2013 7th European Conference on, April 2013, pp. 3054–3057.
- 45. A. Blischak and M. Manteghi, “Pole residue techniques for chipless RFID detection,” in Antennas and Propagation Society International Symposium, 2009. APSURSI '09. IEEE, Charleston, SC, USA, June 2009, pp. 1–4.
- 46. S. Mukherjee, “Chipless radio frequency identification by remote measurement of complex impedance,” in Microwave Conference, 2007. European, Munich, Germany, Oct 2007, pp. 1007–1010.
- 47. P. Kalansuriya, N. Karmakar, and E. Viterbo, “On the detection of frequency-spectra-based chipless RFID using UWB impulsed interrogation,” IEEE Transactions on Microwave Theory and Techniques, vol. 60, no. 12, pp. 4187–4197, Dec 2012.
- 48. M. Manteghi, “A novel approach to improve noise reduction in the Matrix Pencil Algorithm for chipless RFID tag detection,” in Antennas and Propagation Society International Symposium (APSURSI), 2010 IEEE, Toronto, ON, Canada, July 2010, pp. 1–4.
- 49. A. Lazaro, A. Ramos, D. Girbau, and R. Villarino, “Chipless UWB RFID tag detection using continuous wavelet transform,” IEEE Antennas and Wireless Propagation Letters, vol. 10, pp. 520–523, 2011.
- 50. A. Vena, E. Perret, and S. Tedjini, “Chipless RFID tag using hybrid coding technique,” IEEE Transactions on Microwave Theory and Techniques, vol. 59, no. 12, pp. 3356–3364, Dec 2011.
- 51. D. Chizhik, G. Foschini, and R. Valenzuela, “Capacities of multi-element transmit and receive antennas: correlations and keyholes,” Electronics Letters, vol. 36, no. 13, pp. 1099–1100, Jun 2000.
- 52. M. Nakagami, “The m-distribution -A general formula of intensity distribution of rapid fading,” in Statistical Methods in Radio Wave Propagation, W. Hoffman, Ed. Pergamon, 1960, pp. 3–36.
- 53. R. Langwieser, C. Angerer, and A. Scholtz, “A UHF frontend for MIMO applications in RFID,” in Radio and Wireless Symposium (RWS), 2010 IEEE, New Orleans, VA, USA, Jan 2010, pp. 124–127.
- 54. M. A. Ingram, M. F. Demirkol, and D. Kim, “Transmit diversity and spatial multiplexing for RF links using modulated backscatter,” in International Symposium on Signals, Systems and Electronics (ISSSE), 2001, Tokyo, Japan, July 2001.
- 55. C. Divarathne and N. Karmakar, “MIMO based chipless RFID system,” in RFID-Technologies and Applications (RFID-TA), 2012 IEEE International Conference on, Nov 2012, pp. 423–428.
- 56. M. Islam and N. Karmakar, “A novel compact printable dual-polarized chipless RFID system,” IEEE Transactions on Microwave Theory and Techniques, vol. 60, no. 7, pp. 2142–2151, July 2012.
- 57. A. Vena, E. Perret, and S. Tedjni, “A depolarizing chipless RFID tag for robust detection and its FCC compliant UWB reading system,” IEEE Transactions on Microwave Theory and Techniques, vol. 61, no. 8, pp. 2982–2994, Aug 2013.
- 58. A. Vena, E. Perret, and S. Tedjini, “A fully printable chipless RFID tag with detuning correction technique,” IEEE Microwave and Wireless Components Letters, vol. 22, no. 4, pp. 209–211, April 2012.
- 59. I. Balbin and N. Karmakar, “Phase-encoded chipless RFID transponder for large-scale low-cost applications,” IEEE Microwave and Wireless Components Letters, vol. 19, no. 8, pp. 509–511, Aug 2009.
- 60. R. Koswatta and N. Karmakar, “A novel reader architecture based on UWB chirp signal interrogation for multiresonator-based chipless RFID tag reading,” IEEE Transactions on Microwave Theory and Techniques, vol. 60, no. 9, pp. 2925–2933, Sept 2012.
- 61. R. Rezaiesarlak and M. Manteghi, “A space-frequency technique for chipless RFID tag localization,” IEEE Transactions on Antennas and Propagation, vol. 62, no. 11, pp. 5790–5797, Nov 2014.
- 62. R. Rezaiesarlak and M. Manteghi, “A new detection technique for identifying chipless RFID tags,” in Radio Science Meeting (USNC-URSI NRSM), 2014 United States National Committee of URSI National, Boulder, CO, USA, Jan 2014, pp. 1.
- 63. R. Rezaiesarlak and M. Manteghi, “Time-frequency analysis of the scattered signal from chipless RFID tags,” in Radio Science Meeting (USNC-URSI NRSM), 2014 United States National Committee of URSI National, Boulder, CO, USA, Jan 2014, pp. 1.
- 64. P. Kalansuriya, N. Karmakar, and E. Viterbo, “Signal space representation of chipless RFID tag frequency signatures,” in Global Telecommunications Conference (GLOBECOM 2011), 2011 IEEE, Houston, TX, USA, Dec 2011, pp. 1–5.
- 65. R. Koswatta and N. Karmakar, “A novel method of reading multi-resonator based chipless RFID tags using an UWB chirp signal,” in Microwave Conference Proceedings (APMC), 2011 Asia-Pacific, Melbourne, Australia, Dec 2011, pp. 1506–1509.
- 66. A. Blischak and M. Manteghi, “Embedded singularity chipless RFID tags,” IEEE Transactions on Antennas and Propagation, vol. 59, no. 11, pp. 3961–3968, Nov 2011.
- 67. S. Mukherjee, “Chipless radio frequency identification by remote measurement of complex impedance,” in Wireless Technologies, 2007 European Conference on, Munich, Germany, Oct 2007, pp. 249–252.
- 68. W. Dullaert, L. Reichardt, and H. Rogier, “Improved detection scheme for chipless RFIDs using prolate spheroidal wave function-based noise filtering,” IEEE Antennas and Wireless Propagation Letters, vol. 10, pp. 472–475, 2011.
- 69. P. Kalansuriya and N. Karmakar, “Time domain analysis of a backscattering frequency signature based chipless RFID tag,” in Microwave Conference Proceedings (APMC), 2011 Asia-Pacific, Melbourne, Australia, Dec 2011, pp. 183–186.
- 70. M. Manteghi, “A space-time-frequency target identification technique for chipless RFID applications,” in Antennas and Propagation (APSURSI), 2011 IEEE International Symposium on, Spokane, WA, USA, July 2011, pp. 3350–3351.
- 71. F. Costa, S. Genovesi, and A. Monorchio, “A chipless RFID based on multiresonant high-impedance surfaces,” IEEE Transactions on Microwave Theory and Techniques, vol. 61, no. 1, pp. 146–153, Jan 2013.
- 72. V. Montilla, E. Ramon, and J. Carrabina, “Frequency scan technique for inkjet-printed chipless sensor tag reading,” in Electronics, Circuits, and Systems (ICECS), 2010 17th IEEE International Conference on, Athens, Greece, Dec 2010, pp. 1100–1103.