Automation for smart grids in Europe
Davide Della Giustina⁎; Ferdinanda Ponci†; Sami Repo‡ ⁎ Unareti SpA, Brescia, Italy
† RWTH Aachen University, Aachen, Germany
‡ Tampere University of Technology, Tampere, Finland
Abstract
The electricity distribution network has been and still is the center of a technology innovation leading to what has been called the smart grid. This technological innovation mainly centered around the improvement of the quality of service through the installation of medium voltage (MV) automation systems, and the remote reading of customer consumption with the use of electronic meters. From a distribution system operator perspective, new distributed management system software is getting more and more common as an improvement of the traditional Supervisory Control And Data Acquisition (SCADA) system in order to perform analysis (e.g., power flow) on near real-time measurements collected by the field. Again, those systems are fed by MV values mainly coming from the automation system installed in primary substations and—in some cases—from historical load profiles from the metering system, where available. The low-voltage (LV) network—that is, the voltage level where you find most of the distributed generation from renewable resources, new electric loads such as heap pumps, electric vehicles, etc.—has not been involved in a massive deployment of new technology yet. Therefore, it is often not involved in a deep analysis such as the one carried out on the MV. To some extent, it can be said that the LV network technology is still in a demonstration phase. Field and lab demonstrations—like those performed during the 7th Framework Programme European project IDE4L—are a privileged way to prototype and field test new systems for monitoring, analysis, and control of the LV network in order to derive practical business cases for the new technologies to be deployed in the next generation of smart grids.
Keywords
Smart grid; Low-voltage network; Smart metering; Distributed measurement system; Real-life demonstration
1 Introduction
1.1 Distribution system operators’ challenges and needs in the EU
Distribution system operators (DSOs) operate in a scenario defined by a national and international regulatory framework that, on one hand, vigorously promotes and rewards customers who install distributed generation (DG) and, on the other hand, pressures the DSO's operating margin. In most European countries these operating margins are contingent upon regulated prices (a price cap), which tend to decrease over time. They are also subjected to remuneration or penalization mechanisms related to the number and the length of outages for both medium voltage (MV) and low voltage (LV) customers. This growing complexity, brought about by DG, makes it increasingly difficult to meet those quality of service standards. Therefore the only sustainable way for DSOs to cope with this trend and keep their economic model in balance is to enhance the technological level of the grid and the efficiency of their operations, moving toward the smart grid [1].
1.1.1 Regulations about service continuity
The power distribution grid is a dependable asset of the modern society. For this reason the DSO—the body in charge of its management—is constantly assessed to determine the quality of the service delivered to its customers. In the scope of the quality of service domain, one of the most relevant criteria is the continuity of service, which relates to voltage interruption. A voltage interruption is defined as the decrease in the voltage supply level to < 10% of nominal for up to 1 min duration [2]. Many national authorities set output-based incentive schemes aimed at improving the continuity of service, based on the measurement of key performance indicators (KPI) related to voltage interruptions. Among them, two of the most commonly used are:
- • the System Average Interruption Frequency Index (SAIFI), the average number of interruptions that a customer would experience.
- • the System Average Interruption Duration Index (SAIDI), the average interruption duration for each customer served, defined according to the following formulas:

where n is the number of interruptions in a year; m is the number of customer clusters affected by the same duration of interruption; Ui is the number of customers involved in the ith interruption; Ui,j is the number of customers involved in the ith interruption, belonging to the jth cluster; ti,j is the duration of the interruption for the cluster Ui,j; and Utot is the number of customers at the end of the year.
Voltage interruptions are classified according to their duration t in: transient interruption, when the event lasts < 1 s (t ≤ 1 s); short interruption, when the event duration is between 1 s and 3 min (1 s < t ≤ 180 s); and long interruption, when the event last more than 3 min (t > 180 s) [2].
As an example, in Italy [3] an output-based incentive scheme aimed at improving the continuity of service has been set based on those indicators: each year, a DSO receives a bonus or pays a penalty if the SAIFI—when evaluated for short and long interruptions only—and the SAIDI—when evaluated for long interruptions only—exceed a specific threshold value, varying with the territorial density of customers. At present, the regulatory framework does not foresee any incentive/penalty mechanism for transient interruptions.
1.1.2 Regulations about voltage quality
Besides the continuity of service, the quality of service is characterized by the level of power quality (PQ). The growing presence of distributed energy resources (DERs) is one of the most impactful causes affecting the quality of the energy provided by DSOs. In Europe, this topic is monitored by the Council of European Energy Regulators (CEER). In [4], the working group on the quality of electricity supply of the CEER provides a comparison among quality levels, standards, and regulation strategies for electricity supply in European countries. The benchmark about the quality of the electricity supply in 2011 [5] reports that in several EU countries (among them the Czech Republic, Hungary, Norway, Slovenia, Italy, Austria, Lithuania, The Netherlands, Portugal, etc.), the DSO is required to perform PQ measurements. Different phenomena are monitored in different countries; however, the EN 50160 [2] is used as a reference in most cases. Among the many PQ events, the short-duration RMS variations—also called voltage dips—are the most important.
As an example, in Italy the national authority mandates that DSOs monitor the PQ on MV bus bars in PS-using devices compliant with IEC 61000-4-30 [6], and periodically prepare reports about the number and the origin of voltage dips measured on the MV network.
1.2 Smart grid automation demos in Europe
The European Commission plays a major role toward the realization of the smart grid in Europe. The current progress toward the Energy Union is laid out in the 2nd Report on the State of the Energy Union 1.2.2017 [7] and it indicates positive trends in the direction of achieving the 2030 energy and environmental goals.
The research, development, and demonstration program to accelerate the evolution of the energy sector is laid out in the European Electricity Grid Initiative (EEGI) [8] road map, the Strategic Energy Technologies Plan (SET-Plan), and, eventually, assessed in Transforming the European Energy System Through INNOVATION—Integrated SET Plan—Progress in 2016 [9].
The latest legislative proposals to the implementation of the Energy Union have been released in the “Clean Energy For All Europeans,” known as the Winter Package 2016 [10], pointing to a system where the automation of the electricity system in the direction of the smart grid is clearly unavoidable. The research, development, and demonstration projects funded by the EU Commission point in this direction. Noticeably, the role of demonstrations is evident in the relevant portion of the H2020 funding program: Demonstrations involve smart grids, storage, and system integration technologies for distribution systems with increasing share of renewables.
An overview of the status of European smart grid projects, from 2004 to 2014 from all funding sources, has been compiled by the Joint Research Center of the EU Commission in [11], for projects up to 2011 and in [12] or a comprehensive overview up to 2014. The new outlook report is expected to be published in Summer 2017.
Data show an increasing investment, with 221 ongoing projects totaling 2 billion € (with an average of 9 million € per project) and 238 completed projects totaling 1.15 billion € (with an average of 5 million € per project).
Furthermore, research and development projects show a total budget of about €830 million whereas demonstration and deployment projects total about 2320 million €.
In the context of EU Commission funding, the reference broad topic for smart grids is the H2020-EU.3.3.4—A single, smart European electricity grid. In this context, the most relevant program is the societal challenge of competitive low-carbon energy, in particular the research initiative “LCE-02-2016—Demonstration of smart grid, storage and system integration technologies with increasing share of renewables: distribution system.” Here the targeted technology readiness levels typically range between 5 and 8. It is required that the proposed solutions are demonstrated in large-scale pilots and validated in real-life conditions.
In the FP7 program, the antecedent of H2020 and whose projects ended in 2016, the project Grid4EU Large-Scale Demonstration of Advanced Smart Grid Solutions with wide Replication and Scalability Potential for EUROPE [13] stands out for its 2011–16 €54 million cost, six DSO demonstrators, and 51 month total testing period in six European countries. Most of the demonstrations focused or were based on automation of the MV and LV distribution system.
A success story in terms of development and demonstration of smart grid automation is the IDE4L Ideal Grid for All project, rewarded with the excellence stamp of the EU Commission. Some results of the project are included in the current chapter. Development and demonstrations of the smart grid can be found also among the IDE4l cooperation projects: INCREASE, which focuses mainly on increasing the penetration of renewable energy sources into the grid; EvolvDSO, which has defined new roles of the DSOs and also encompasses planning, operational scheduling, and maintenance; DREAM, which builds and demonstrates an industry-quality reference solution for DER aggregation level control and coordination based on available ICT components.
The new research program H2020 is bringing a new, demonstration-oriented thrust in the smart grid domain, in particular through the low-carbon energy calls LCE-07 (“Innovation Initiatives”) and LCE-02 (“Demonstration of smart grid, storage and system integration technologies with increasing share of renewables: distribution system.”).
In project INTERFLEX, five DSOs and a total of 20 industrial partners, including utilities, manufacturers, and research centers, are involved in the project, which has a budget of €23 million. Partners will run six demonstrations for 12–24 months with the goal of validating the role of DSOs in calling for flexibility. Demonstrations run numerous use cases of energy storage technologies (electricity, heat, cold), demand response schemes with two network couplings (electricity and gas, electricity and heat/cold), the integration of electric vehicle owners, and advanced automation and microgrids. The use cases address the enhancement of the distribution network flexibility itself, demonstrate the role of IT solutions to speed up automation of distribution for local single or aggregated flexibilities, and combine automation and an increased level of aggregation to validate the plausibility of local flexibility markets. INTERFLEX [14] runs from 2017 to 2019, on a €22 million budget.
Project FLEXICIENCY [15] targets the accessibility of metering data, close to real time, made available by DSOs in a standardized and nondiscriminatory way to all the players in electricity retail markets (e.g., electricity retailers, aggregators, ESCOs, and end consumers). The aim is to facilitate the emergence of new markets for energy services, enhancing competitiveness and encouraging the entry of new players, which benefits the customers. Economic models of these new services will be proposed and assessed. Based on the five demonstrations, while connecting with parallel projects funded at EU or national levels, a total of about 16.000 customers involved. The project runs from 2015 to 2019 on a €19 million budget.
The project UPGRID [16] develops and demonstrates new solutions for advanced operation and exploitation of LV/MV networks. The context is the smart grid environment with increased capacity for hosting DERs, involving the customers and creating new business opportunities. The demonstration is primarily carried out in four field pilots in Portugal, Poland, Spain, and Sweden. They cover monitoring and operation, advanced grid maintenance, awareness of the consumers, and their cost-effective participation. The project runs from 2015 to 2017 on a budget of €15 million.
Project GOFLEX [17] aims to enable the flexibility of the automatic trading for the capabilities of the virtual power plant and virtual storage. Data services for local estimation and prediction support data-driven decision making. GoFlex will start with three European demonstration sites involving > 400 prosumers from industry, buildings, and transport—in Cyprus, Germany and Switzerland 2016–19 on a budget of €11 million.
For an overview on regulation, refer to CEER Status Review on European Regulatory Approaches Enabling Smart Grids Solutions (“Smart Regulation,” C13-EQS-57-04 February 18, 2014). This status review represents a cross-section of smart grid demonstration projects in Europe. It also contains a summary of the status (and links to detailed reports) of the smart grid demonstration projects, including funding and assessment.
Projects that are closer to commercial implementation are funded in the program FTIPilot-01-2016 [18] —Fast Track to Innovation Pilot. Among these, ADMS (Active Distribution Management Systems) develops and demonstrates on the premises of DSOs new low-cost solutions for monitoring and automation based on innovative sensing technologies, data-driven monitoring functions, and cloud implementations.
Finally, the large, typically cross-border Projects of Common Interest (PCI) [19] support the field implementation of new technologies. In particular, currently active PCI in the smart grid area are the following:
The North Atlantic Green Zone Project (Ireland, United Kingdom/Northern Ireland) aims at lowering wind curtailment by implementing communication infrastructure, enhanced grid control, and interconnection and establishing (cross-border) protocols for demand-side management. The commissioning is expected in 2018. The underlying technology is that of intelligent distribution networks, overlaid with high speed communications.
Green-Me (France, Italy) aims at enhancing RES integration by implementing automation, control, and monitoring systems in HV and HV/MV substations, including communication with the renewable generators and storage in primary substations as well as new data exchanges for a better cross-border interconnection management. The enabling technologies are load and generation forecasting and improved communication between TSO (Transmission System Operator) and DSO (Distribution System Operator) automation systems. As a result, the hosting capacity of further RES will grow while quality and system reliability will be guaranteed. The realization of this connection is under consideration for 2025.
SINCRO.GRID (Slovenia/Croatia) aims at solving network voltage, frequency control, and congestion issues via a virtual cross-border control center involving two neighboring TSOs and the two neighboring DSOs. The dedicated IT infrastructure and software will support algorithms for Volt-Var Control (VVC) optimization, secondary reserve, managing battery storage, advanced real-time operation of the grid with advanced forecasting tools, and using dynamic thermal rating. The feasibility stage is expected to be completed in 2021.
1.3 IDE4L at a glance
The IDE4L project was focused on the investigation and development of new solutions and architectures to plan, manage, and control future distribution networks. In detail, the project covered the integration of DERs (e.g., DG, electric vehicles) in distribution networks in order to reduce emissions, save energy, reduce network losses, improve network monitoring and controllability, utilize existing networks more efficiently, and improve visibility of DERs to transmission system operators and aggregators. The project also proposed innovative smart solutions to design and operate distribution networks in order to guarantee the continuity and quality of electricity supply.
The conceptual development of the active distribution network and automation architecture as well as the network management have been the basis of the whole project. The main goal was to create a comprehensive concept and map for DSOs to start deploying and developing the active distribution network, based on existing technologies and solutions, to meet future requirements of distribution grids. The project has addressed some major challenges of future electricity distribution networks, which will be much more complex than today's passive networks. The hosting capacity of passive networks can be increased by huge investments, but by applying the IDE4L approach and concept, the active network management will dramatically reduce these investments.
Another aspect taken into consideration in the IDE4L project has been the coordination of network and energy market operations together with customers, which requires extended analysis of electricity systems at all levels. Possible conflict of DERs participating in the electricity market and distribution network technical constraints can be solved using algorithms and functionalities developed within IDE4L through the smart active network management.
A smart automation infrastructure has been designed and realized in order to monitor LV and MV grids, to mitigate the fault effects in the distribution network based on innovative fault location, isolation, and supply restoration (FLISR) logics. State estimation and load-production forecasting solutions have been implemented as well in order to provide correct inputs to a power control system that is able to regulate the voltage in the network feeders by controlling several resources, such as controllable photovoltaic (PV) inverters or transformer online tap-changers.
2 Architecture
2.1 DSO control hierarchy
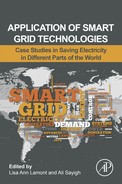
Fig. 1 illustrates the hierarchy of the controllers and their interactions at the conceptual level. The control system has three hierarchical levels (primary, secondary, and tertiary controllers) that interact with each other by providing monitoring and estimation data to an upward direction and by sending optimized reference values to downward direction. Note that that figure does not include the monitoring part of the complete automation system. The primary controller operates continuously while the secondary controller may update reference values periodically (5 min in the demonstration), and the tertiary controller operates primarily in day-ahead basis, but may participate in real-time operation in case of emergency (after a fault and required supply restoration or while a secondary controller requests help). Secondary and tertiary controllers are responsible for controlling voltage within control areas (background color codes of squares in the figure). A typical selection of control areas would be according to voltage levels, that is, one secondary controller for each LV grid where control is needed or enabled; one secondary controller for the MV grid below a primary substation; and a tertiary controller for the whole MV grid including multiple primary substations. The color codes of lines indicate which part of the complete system has been utilized in the demonstrations: Demonstration of Secondary Controller (LV grid), IED DER direct control and IED DSO Units in Unareti; Demonstration of Tertiary Controler (scheduling), Tertiary controller (DMS), Secondary Controller (MV grid), IED DSO Units, IED DER direct control in integration laboratory extension for the field Demonstration.

Primary controllers (intelligent electronic devices, IEDs) operate autonomously with fast response based on local measurements only, and a secondary controller dedicated to that control area may adjust the set points remotely. The information that control area primary controllers belong to is maintained in the grid model needed for the computation of state estimation and the optimal power flow of secondary and tertiary controllers. Status changes of automated circuit breakers and switches is immediately known at the secondary controller level as well as at the tertiary control level, but the operation of manually controlled switches must be updated from distribution management system (DMS). DMS interacts with the workforce management system to send and receive work orders and to update the status information of switches to/from field crews.
Secondary controller coordinates (optimizes) the operation of primary controllers (IEDs) within a control area based on state estimation results of the control area. Secondary controllers are located at primary or secondary substation automation units (SAUs), depending on which network, MV, or LV grid they are managing. A tertiary controller (DMS) manages the whole distribution grid. It is located in DMS and it communicates with commercial aggregators via a market operator to validate and to request flexibility services (scheduled reprofilling (SRP) and conditional reprofiling (CRP) products to indirectly control DERs via microgrids or home energy management systems (HEMS) [20]), and it adjusts network topology remotely via SCADA and workforce management systems. It may also advise secondary controllers from system and day-ahead viewpoints.
The secondary control for distribution grid congestion management optimizes the settings of primary controllers to enhance the hosting capacity for DERs and to solve occasional congestion problems. The secondary controller most benefits the cases in which congestion occurs occasionally, network reinforcement costs are high, and the control area includes several primary controllers such as the automatic voltage regulator of the DG unit and/or production curtailment (DER direct control) and the automatic voltage controller (AVC) of the on-load tap changer (OLTC) (DSO unit). DSO should naturally have a control contract or obligation based on grid code to control DER units. In a weak distribution grid, the hosting capacity provided by the secondary controller is typically three to four times higher than the hosting capacity of the passive network, and two to three times higher than the hosting capacity of the active network utilizing only primary controllers [21–23]. A secondary controller is running in real time and it is based on optimal power flow to define set points for primary controllers to minimize operational costs such as grid losses within the control area, production curtailment, demand response, tap change action, and voltage deviations. As an input, it needs the state estimation results of the control area. Details and thorough explanations of the secondary and tertiary controllers and the operation of all of their functionalities are given in [24].
SAU collects real-time monitoring data from smart meters (SMs) and IEDs as described earlier. In principle, two clients are used for that purpose: IEC 61850 MMS and DLMS clients. Because client poll data from a single meter or IED at time, the process of going through all units takes some time and secondly the latest measurements received from units are not from the same time instant. These practical issues have impacts on the performance of state estimation and voltage control. These issues may be partly removed by enhancing the communication applied, but the choice of communication is always a compromise between technical performance and overall costs. After receiving data, clients will write it into a local database of SAU. State estimation and secondary voltage control are run periodically, utilizing available data on that time in the database. After finalizing the computation, algorithms write results to the local database to be used by other algorithms as inputs and clients as changes of the primary controller reference points.
Both the state estimation and the secondary voltage control (optimal power flow) require an exact distribution grid model. SAU maintains information about grid topology and grid parameters in the database. The data model of grid presentation is based on the common information model (CIM) [25]. The CIM data model is utilized to present grid topology by status of switches, grid parameters such as impedances, component types and control characteristics, and customer/prosumer data like location, contracted capacity, annual energy, consumption/production load profiles, etc. Real-time measurements, historian values, and calculation results of state estimation, forecasting, and secondary voltage control are modeled utilizing the data model of IEC 61850. Therefore, a mapping between these two standard-based data models has been created [26,27].
The update of the distribution grid model in SAU is realized in a few steps. The most frequent updates are received from IEDs and SMs that belong to the control area of SAU. These data packages include, in addition to real-time measurements of electrical quantities, the status of a device or customer (grid connected or not) and parameters of primary controllers (setting of reference value, control mode, delays, etc.). Therefore, if a switch or distribution grid has an IED read by SAU, the topology of the grid model in SAU may be updated immediately after opening or closing a switch. If a supply restoration is utilized in the grid operation, then the grid model in the SAU should also include grid elements of possible backup connections. SCADA, DMS, and the workforce management system in DSO's control center are managing the status of all switches. The update of these switches could be realized by CIM difference model exchange from DMS to SAU. The CIM difference model should be exchanged immediately after a topology change in the control area of SAU has been updated in DMS. In a similar way, grid and customer parameters require updating from time to time due to grid extension. These changes are less frequent and are always well planned, and therefore a batch update of the grid model in SAU is enough. Scalability of such a solution requires, however, full automation of the information exchange from DMS to SAU. These two updates of difference models have not been implemented in the demonstration because DMS with necessary CIM interface was not available.
2.2 Commercial aggregator control hierarchy and interaction with DSO
Fig. 2 does not completely represent the IT and automation systems of market operator and commercial aggregators, which were not in the focus of the IDE4L project although information exchange between these stakeholders was considered. Fig. 2 represents the control hierarchy of the commercial aggregator, which has a similar three-level structure as DSO had in his IT and automation system. The tertiary controller (scheduling) optimizes the utilization of aggregated flexibility resources in different energy and flexibility markets such as day-ahead, intraday, intrahour, TSO's control and reserve markets, and DSO's local flexibility market. Typically, scheduling is realized in an energy management system (EMS) of the commercial aggregator control center.

The secondary controller (customer) optimizes and manages the local flexibility resources of the customer, based on price or volume signals coming from the commercial aggregator and the real-time monitoring data of the flexibility resources. The customer might be an energy community (virtual microgrid), microgrid (local physical microgrid), building/commercial service/industrial facility, or a single end-customer such as a household. The secondary controller in these cases might be, for example, a microgrid central controller, a building/factory/home EMS located at a customer site, or a cloud service depending on what kind of functional and nonfunctional requirements the IT and automation systems should perform.
The IED (DER indirect control) is the primary controller of the flexibility resource. The control is indirect from DSO's perspective because the IT and automation system of the commercial aggregator is making the control decision instead of DSO although DSO requests a control action via a flexibility service marketplace. The IED is, for example, a thermostat of the heating/cooling device, which has advanced functionalities such as the capability to remotely adjust the reference point or other parameters of the primary controller, or has advanced functionalities such as the frequency or voltage-dependent control characteristics [28,29]. Many grid codes already mandate frequency and voltage-dependent control for DG units. The draft harmonized grid code of ENTSO-E would extend that kind of requirements down to an 800 W unit size [30].
The control of the customer-owned DERs may also be realized by direct control (e.g., grid code or bilateral contract), but the flexibility of DERs may be utilized only by a DSO. Direct control is deterministic for a DSO and rather straightforward to realize compared to indirect control of the local flexibility market. Nonfirm connection contract between a customer and DSO is an example of bilateral contract, where DSO has the chance to curtail production or shift controllable loads to off-peak periods. Grid code might be used to mandate control and communication capabilities for DERs (e.g., reactive power control capability of a DG unit, which is available for DSO).
A commercial aggregator, in principle, may operate as a third party, but that would create a serious conflict of interest between electricity market stakeholders such as retailers, balance responsible parties and TSO/DSO without proper co-ordination, open information exchange, and clarification of responsibilities of each party. In order to simplify this process, the IDE4L project considered only a case where the balance responsible party or retailer acts as the commercial aggregator, making the chain of balance responsibility remain intact and delivering simple arrangements such as one main contact point for the customer [31]. In a similar way to ensure safe, secure, and cost-efficient distribution, transmission network operation, and development, commercial aggregators will have to coordinate with DSOs and TSOs that must also coordinate with each other and have access to flexibility services and all technical relevant data needed to perform their activities, both at prequalification and operation stages.
The IDE4L project adopted and further developed the concept of flexibility products called SRP and CRP, originally developed in the ADDRESS project [29]. SRP is an obligation for a specified demand modification at a given time. CRP is the capacity for a specified demand modification at a given time with an activation coming from a buyer as a control signal. The SRPs are formed by means of price incentives, triggering the load reprofiling of the prosumers. In response to the signals, the consumers change their consumption level at specific time intervals. Therefore, the aggregator sells a deviation from the forecasted level of demand and not a specific level of demand. The CRPs demand a more immediate and direct control, so their activation is performed by means of direct control signals (power setpoints).
Fig. 2 represents the interaction of the commercial aggregator and other market stakeholders of electricity (wholesale) and flexibility markets. Flexibility markets include balancing and ancillary service markets organized by TSOs today and local flexibility markets aimed at congestion management and voltage control, which are more localized issues compared to system balancing and frequency control. Both TSO and DSO have access to a common flexibility market to avoid fragmentation of markets and ensuring the effectiveness of the system operation [30]. The bidding for the flexibility market is realized on a day-ahead and intraday basis, as in the wholesale market. The DSO/TSO sends to market flexibility requests that are required to alleviate congestion and other system needs. At the same time, the commercial aggregator sends its bids to different markets. When the gate closes, the market clearing process starts to match the flexibility requests received from the DSO, TSO, or any other interested entities with the available bids. After market clearing process, the DSO offline validation will check if distribution grid violations occur due to SRPs. Validation is realized with a sequential load-flow of 15-min time slots based on market clearing and forecasted data of distribution grid configuration and operating conditions. If a distribution grid violation is detected, then an optimal power flow (OPF) is performed to find a minimum set of SRP changes, production curtailment, etc. Once the offline validation is done, DSO sends one of three signals to the flexibility marketplace regarding each bid (approved, rejected, or need for curtailment). The assumption here is that the DSO has the right to reject or demand curtailment of the bids that will cause a violation of network constrains with no compensation for the commercial aggregator. When the offline validation process has finished, the marketplace sends contracts to the relevant flexibility buyers and sellers.
DSO uses real-time validation before giving its consent to the request of a flexibility product by the TSO or other market stakeholder, which is activated close to real time and therefore refers to the actual configuration and operating conditions of the distribution system. Real-time validation checks distribution grid technical limitation violations in a similar way to offline validation, but this function runs automatically and periodically, every 15 min. It will focus on validation of CRP products going to be activated during the next period.
The business role of DSO calculates and determines how much flexibility is required to alleviate congestion in the DSO grid or for network optimization as well as what kind of flexibility is required (SRP or CRP). It communicates this to the market place as a request for flexibility. The second role is the validation role. In this role, the DSO performs the offline validation and real-time validation. From the DSO perspective, flexibility should be integrated as part of the tertiary controller (DMS) where new functionalities should be integrated, aiming to realize the new roles of DSO: flexibility procurer and validation of distribution network-located flexibility products.
3 IDE4L demo
3.1 Unareti field demonstrator
The demonstration phase of the IDE4L project revolved around three field demonstrators and four laboratory demonstrators. Field demonstrators were located in Italy, Spain, and Denmark (Fig. 3): different countries and different network conditions to prove the scalability and replicability of the proposed solutions at the European level via specific KPI. As a whole, the demonstrators included large- and small-scale PV panels, wind turbines, heat pumps, and EVs located in urban and rural areas. In the following, the description will be focused on the Italian demonstrator. Among the laboratory demonstrators, the ones of Tampere University and Aachen University modeled this demonstrator to extend the set of testing conditions and to compare simulations versus real field results.

The Italian field demonstrator is located in the city of Brescia (north of Italy) in a district called Il Violino. This district was recently designed to promote an ecocompatible lifestyle: it is characterized by a high percentage of customers equipped with high PV penetration, which is about 40% of the peak demand panels and uses a district heating system. The demonstrator covers the MV and the LV networks up to the final customer connection points, and is general enough to be a concrete test bed for experimenting with the new concepts proposed by IDE4L, in reference to both the MV and LV networks (Fig. 4).

3.1.1 MV demo
The MV network demonstrator consists of 1 MV/MV substation, 3 MV lines, 40 MV/LV substations, and 9 MV customers. Of the three MV lines, two will be fully automated with monitoring, control, protection, and simulation systems while the third one will be mainly involved in simulations and for the LV field trial. To enable the MV automation services, a proper communication network will be implemented by using a mix of technologies, such as fiber optics, broadband power lines (BPL) over MV cables, and Wi-Fi. This communication network is an extension of the one implemented for the FP7 European Project INTEGRIS.
The use of protection functions on the MV network is one of the most relevant application to improve the management of the distribution network. Despite of that, this application is still not applied on a large scale. Across Europe, there are some pilots in which the coordination of IEDs in secondary substations and IEDs in primary substations has already been tested. In some cases, the 61,850 standard has been used to implement a peer-to-peer coordination mechanism. The main limitation of this application, commonly known as logic selectivity, is that the protection settings and logics are based on the standard grid configuration. As a consequence, every time the grid changes, the protection settings and logics are no longer valid. To address this issue, IDE4L proposes an adaptive FLISR solution—based on the logic selectivity—in which the protection system is always configured in the proper way, independently from the power grid configuration. This feature is achieved by modeling the protection settings and logics by using logical nodes from the 61,850 standard and updating values in real time. Those logical nodes were defined by the standard, but they have never been applied in real cases. UNR's MV demo site is the first operating environment where this concept is tested: investments in smarter solutions for the FLISR are made available and effective with a much higher availability with respect to nonadaptive approaches.
3.1.2 LV demo
The LV distribution network includes a secondary substation with 10 feeders, 299 customers, and 118 residential PV installations As is typical in Italy (Fig. 5), LV backbones are three-phase while the connection to the residential customers is single-phase.

Each of the 10 LV lines of the substation has been equipped with new breakers with remote monitoring and control features. Those breakers have the Modbus RTU interface so Modbus RTU-to-61,850 gateways were used. The first gateway (Schneider G3200 A) interfaces the breaker of four LV lines and—furthermore—the temperature and radiation sensors. The second gateway (Schneider G3200 B) interfaces all other LV lines (Fig. 6).

Two extra breakers (without advanced features) were installed to allow a manual bypass of the DVR installed on the LV line 7. This is a further protection besides the automatic DVR bypass already available in series to line 7. Those protections were needed, especially because the DVR is a prototype developed by a university during the Smart Domo Grid project.
Each smart breaker provides the following measurements with a frequency of 10 s: real-time RMS values of phase voltage, current, active power, reactive power, power factor, frequency, voltage imbalance, current imbalance, and voltage total harmonic distortion.
All the monitoring, control and protection devices installed inside the secondary substation were connected to a local switch/router. Among them, there are also:
- • The SSAU PC, where interfaces, the database, and algorithm were installed,
- • The power supply box, which has an ethernet interface allowing for a remote supervision of batteries and the power electronic.
In this area, 60 SMs were installed to monitor in real time the power exchange between the customer, the network and the power produced by PV panels. The installed SMs use the BPL to communicate with the secondary substation where the measurements are collected. Among the real-time RMS values are: phase voltage, current, active power, reactive power, power factor, with a frequency of 1 min. Those SMs use the DLMS/COSEM protocol.
Data coming both from SMs and smart breakers are stored in a database to perform cross analysis, such as those reported later on.
LV functionalities: despite the fact that in some EU countries electronic meters have been already deployed, the LV network cannot be monitored or controlled by the DSO. This limitation is becoming more and more critical because of the increasing presence of DERs. The use of SMs for the technical management of the LV grid has been proposed as a proof of concept in some EU projects (e.g., INTEGRIS), but these projects have mainly focused on monitoring services. In the UNR's demonstrator, in addition to these functionalities, one uses monitored and estimated data to feed brand new algorithms to condition the LV status, such as load and generation forecast, state estimation, and power control algorithms. Moreover, one scales up the infrastructure put in place by UNR during the FP7 European Project INTEGRIS and the Italian Smart Domo Grid project, in order to cover the whole LV grid of a secondary substation. Among the benefits derived from these new LV functionalities are:
- • electronic meters are also used for value-added services related to LV network management.
- • the ease of exploitation in the EU market due to the usage of DLMS/COSEM specifications for meter communication.
- • highlight the future role of DSOs as local dispatchers.
3.2 TUT laboratory demonstrator
Laboratory demonstrations had multiple aims within the IDE4L project, but the ultimate aim was to shorten the initialization duration of field demonstrations. This aim was achieved by fixing software and configuration bugs at as early in the demonstration as possible and by testing the performance of the system to understand if the developed implementations meet specified technical requirements. Also, the searching and solving of bugs from complex automation systems in field conditions is not an easy task, because the real reason might be hidden and the field conditions may produce additional complexity for the performance analysis of the automation system. Therefore, as many hardware and software components and combinations of those were tested in the laboratory environment prior to field demonstrations.
After finalizing the testing of each individual component (e.g., interface, hardware, software component, etc.), it was time to integrate them together and test the interoperability of those components. The test environment of the complete automation system consists of hardware devices, software components, and interfaces between them as described in Fig. 7. The testing of individual components and interfaces separately does not quarantee the performance of the complete automation system and does not provide enough understanding about the complex interactions within the automation system and between different use cases. Interactions are naturally dependent on the implementation of the automation system and therefore the testing of the complete automation system requires integrated hardware and software in the loop simulations.

The advantage of a real-time testing environment is the ability to do testing as close to field conditions as possible. Also the testing can be realized in controlled environments where exactly the same test may be easily repeated or multiple different types of tests may be run in sequence to understand the performance of the system in normal conditions but also in emergency and very rare conditions, which might not be able to be realized in a real distribution grid due to safety or other reasons. Real-time simulation also enables the analysis of such grid conditions easily, which would require expensive investments for the field demonstration. For example, the analysis of the OLTC in the secondary transformer for congestion management functionality is one example that was simulated instead of realizing real investments in the demonstration site. A second example is the increment of DG within the demonstration grid to create challenges for grid management, which existing grids typically cannot have due to the service responsibility of DSOs.
The integation testing is also the testing phase when the delays in information exchange or processing and other unwanted characteristics of the automation system become visible for the performance of the complete system. The aim of automation system testing is therefore searching limits of acceptable behavior of the automation system in the space of possible operation conditions and events. Realization of such testing requires combining a priori knowledge about automation systems, ICT, and electrical grid management. Therefore, the design of interoperability testing is not a trivial task and requires good imagination to find the problematic “corners” of the tested system. Application of the black-box testing approach might be too time consuming because the system is running in real time and some functionalities might require relatively long simulation periods (from minutes to days) to find out the functional and nonfunctional performance of them. Therefore, the gray-box testing approach is recommended, which may utilize the internal structure of the automation system and combine it with ideas of black-box testing while searching for weaknesses in the system without the need to know everything exactly, as in white-box testing. Commercial components such as IEDs are like black-boxes anyway for the complete automation system although there is some knowledge about them via technical manuals and contacts to vendors.
The laboratory demonstration test setup of a decentralized distribution automation system and functionalities will be discussed next. Two test setups and their roles in the demonstration project will also be described. The vital parts of TUT's test setup (Fig. 7) are the physical and commercial IEDs for network monitoring and control. This provides credibility for the test results, the opportunity to test the interoperability of the complete automation system, and the realistic capability and performance of IEDs. IEDs are interfaced with the real-time simulator system as hardware in the loop test devices utilizing analog and digital signals. IEC 61850 sampled values are used when possible; otherwise analog signals and signal amplifier are used. SAU collecting measurements from IEDs as well as storing data and processing data for reporting and control purposes is interfaced with the test setup as software in the loop test systems. Only standard-based information exchange interfaces such as the IEC 61850 MMS for IED reading and writing and the DLMS/COSEM for SM reading were utilized. Additional measurement and control signals between the SAU and real-time digital simulator (RTDS) simulation model are exchanged with RTDS socket interface, which is fast enough for the purpose of secondary control. In this case, the SAU, interoperability of interfaces, and automation functionalities were especially the target of the testing. Detailed information about the test setup may be found [31].
Fig. 7 describes the integration testing environment of the TUT utilized for functional and nonfunctional testing of the IDE4L automation system. The color code of the figure indicates different parts of the system. The purple color (RTDS) represents the distribution grid, DERs, and other elements existing in physical reality, which are real-time simulated in this case. Simulation may also include control systems that are outside the management of DSO, such as HEMS managed by a prosumer or aggregator. A digital real-time simulator is a dedicated simulator for power system simulation combined with the possibility to integrate hardware and software components as part of the simulation. The blue color (lab equipment) is needed to physically interface simulators to IEDs. The orange color (hardware) includes the hardware devices used in the implementation of the automation system. Typically those are IEDs, SMs, and protocol converters, as indicated in the figure. Configuration and performance of these devices is an important part of the complete system and therefore an essential part of integration testing. The red color (software) includes, in this case, all software components needed in the SAU or multiple SAUs. The SAU itself is running on a Linux computer. The testing of SAU includes testing of each individual interface, the performance of the database, functional testing of algorithms, and nonfunctional testing of the complete SAU (Fig. 8).

3.3 RWTH laboratory demonstrator
The RWTH test setup (Fig. 9) resembled the field demonstration in all its components. The UNARETI MV grid has been modeled, node by node, in an RTDS environment. A portion of the LV grid has also been accurately modeled whereas the other parts are modeled as a concentrated load. The RTDS computes a real-time simulation of several grid scenarios, including ones with high renewable generation and high loading conditions. The numerical outputs are converted into digital samples, provided in the DNP3 protocol via the GTNET card, and into analog samples by the GTAO card. Some commercial measurement devices, such as phasor measurement units and SM can be fed with these analog signals thus emulating field conditions for the related measurements. Such measurement devices provide the SAUs with real-time measurements in, respectively, the IEEE c37.118 and DLMS/COSEM protocols. RWTH has also developed some virtual intelligent electronic devices (VIEDs) that provide measurements and accept control setpoints. In this way, it is possible to simulate several classes of IEDs in the grid with few hardware and software expenses. Similarly to the commercial devices, they communicate regularly with the SAUs. The VIEDs exploit the IEC 61850 MMS protocol. The SAUs, developed in the version to be installed in the secondary and primary substations, work as in the field demonstration with full coverage of automation functionalities. In fact, the SAU run the common version of the IDE4L database, the IEC 61850, DLMS/COSEM, IEEE C37.118 software interfaces and state estimation, power control, and load forecast algorithms. One functionality that was tested only on the RWTH premises, was the communication among SAUs. Such communication exchange permitted the exchange of state estimation results at the connection point between MV and LV. In this way, both the estimation results can be further optimized. Fig. 9 RWTH shows the RWTH laboratory test set up for the IDE4L project.

4 Monitoring and forecast
4.1 Performance of the communication network for the LV monitoring
As explained in the above sections, the LV field demonstrator is based on the use of the BPL technology to collect data from SMs. The present section reports some indicators about the performance of this network based on the data collected through an intensive experimental characterization.
It's worth recalling that traditionally, smart metering applications haven’t been mandated for a performing communication infrastructure because they have been mainly focused on the billing and customer relationship management (e.g., remotely activate/deactivate a contract, change contractual power, etc.). Requirements for such nontechnical services were easily fulfilled by many technologies. One of the most used was power line communication (PLC) such as the IEC 61334-5-1 [32], offering a limited bandwidth (approximately a few kilobits per second). Still remaining in the PLC domain, more advanced technologies were then proposed to overcome some of the limitations of the IEC 61334-5-1. Among them, the PRIME and G3-PLC [33] were the most relevant ones. As an example, PRIME has been tested in Spain, France, and Switzerland. Technical features of PRIME allow the reaching of a theoretical performance of 128 kbit/s, which is a good improvement with respect to previous standards.
To further boost the performance of the data collection, a leap in the technology is needed. For this reason it was decided to use a BPL solution, which—taking advantage of a wider bandwidth for the communication—provides a theoretical performance higher than 100 Mbit/s [34].
Fig. 1 describes how this BPL network was deployed in a real field demonstrator. SMs are connected to a BPL modem (API-2000-GW), working at 2–12 MHz. Repeaters were installed in some central nodes of LV feeders (e.g., LV street cabinets) to group together the slave modem connecting the meters. The master node was located in the secondary substation in order to collect the data (depicted in Fig. 6).
This network was experimentally characterized in order to measure two important parameters affecting the performance of a distributed measurement system: the round trip time—which is related to the latency of the system—and the time offset of the synchronization system. Details about the measurement procedure can be found in [35]. Table 1 reports those two quantities for some of the nodes of the BPL network.
Table 1
| Node | RTT (ms) | Time synchronization | ||
|---|---|---|---|---|
| 95-perc. (ms) | Mean (ms) | Std (ms) | Jitter (ms) | |
| N1 | 2337 | 9.1 | 109 | 884 |
| N2 | 2085 | 20.7 | 105 | 933 |
| N3 | – | 9.2 | 104 | 880 |
| N4 | 2090 | 28.8 | 95 | 1049 |
| N5 | 2323 | 14.9 | 97 | 1098 |
| N6 | 1849 | − 4.6 | 89 | 1010 |
| N7 | 916 | − 38.7 | 59 | 939 |
| N8 | 1725 | 15.4 | 87 | 943 |
| N9 | 2372 | − 26.4 | 77 | 884 |
| N10 | 1923 | 35.7 | 80 | 1055 |
| N11 | 2013 | 1.2 | 82 | 647 |
| N12 | – | 7.5 | 92 | 943 |
| N13 | 2356 | 15.9 | 100 | 1132 |
| N14 | 1956 | 22.4 | 87 | 819 |
| N15 | 2062 | 15.4 | 72 | 599 |
| N16 | 2383 | 12.3 | 98 | 1036 |
| N17 | 2094 | 12.7 | 95 | 864 |
| N18 | 1790 | − 0.1 | 84 | 825 |
| N19 | 2313 | 5.9 | 98 | 925 |
| N20 | 2160 | 2.0 | 94 | 878 |
| N21 | 913 | − 31.6 | 56 | 830 |
| N22 | 2419 | 123.7 | 114 | 1639 |

4.2 Analysis of data from the LV monitoring system
In the next part of the section, the analysis will revolve around data collected by SMs.
As a sample of the data collected by the SMs installed in the demo area, Fig. 10 reports active power profiles from two LV customers with a contractual power of 4.5 and 3 kW, respectively. For the same customers, the bottom part of the picture shows the production of their PV panels (5.6 and 1.29 kW).

SM data were stored in a database for 1 year and then further processed to derive average load and production profiles. The result of the aggregation is reported in Fig. 11 where a comparison between offline average profiles and real measurements is shown for the sake of comparison. It's worth pointing out that the average profile—despite the fact that their accuracy is not perfect—is extremely important because it can be used on behalf of measurements when those are missing to calculate the overall state of the network through a state estimation algorithm, like the one described later.

An analysis of the data reported by smart breakers installed in the substation involved in the demo is reported—as an example—in Figs. 12 and 13, showing respectively the current/current imbalance1 and the voltage/voltage imbalance for one LV feeder (FD 1) in the period between October 10–16, 2016.


In Fig. 12, a periodic behavior over the day with peaks after sunset due to a lack of production from the PVs and the increase of consumption during dinner, and dips over the night, can be appreciated. Furthermore, the current appears to be very unbalanced with a constant value of neutral current over 10 A, and the C phase is normally more loaded than the others.
Observing Fig. 13, two general considerations can be made. First, the voltage at the substation level has a variation of about 10 V during the day. This may be due to voltage variations from the MV. Second, the voltage imbalances are, at the substation level, considerably small. This can also be inferred from Fig. 13 where the voltage imbalances, equal to the difference between the phase voltages and the average voltage (VA + VB + VC)/3, are shown. Also, it may be meaningful to mention that the measurement chain values used by IEDs are fed through sensors with an accuracy class (0.2), therefore an error of approximately 0.4 V may be present. However, it can be observed that the voltage imbalance is, in general, constant; whereas if the sensors introduce the error, it is expected to be statistically distributed over positive and negative values.
The RMS voltage magnitude of feeder 1—phase B is reported in Fig. 14, where it is compared with the values measured by two SMs (namely CU04 and CU07) located on the same phase in two distinct nodes on the LV network. As can be appreciated, in a typical midseason sunny day, the SM CU04 reports a significant voltage rise during the afternoon because of the presence of a PV installation. At the same time, the voltage increase of a customer without a PV is smaller (SM CU07). From this observation it can be derived that a significant part of voltage variation takes place on the short connection between the cabinet and the customer's premises whereas the voltage in the main feeder is probably going to have smaller variations (in the range of a few volts). A second effect that can be observe is the LV value at a customer's premises during the night and the evening, due to the zero power production of PVs and the higher energy demand of customers.

5 State estimation and voltage control
5.1 State estimation results
State estimation is a key enabler for an active network control (e.g., power control algorithm in IDE4L project) because the state of the network must be known in order to efficiently control a network with distributed resources. The IDE4L LV network state estimator uses network data, real-time measurements, load and production forecasts, and fixed load and production profiles as inputs and, based on this information, estimates what is the most likely state of the network at a given moment. The estimated quantities are node voltage magnitudes and node power injections (i.e., load and production) and current flows in all network nodes and lines. The state estimation algorithm was demonstrated in two laboratories (TUT and RWTH) and in three electric utilities (UFD, OST, and UNR). The following results are from Unareti's field demonstration.
The demonstration of the LV grid state estimation proved to be more difficult than expected, but an appropriate solution was finally found. Problems in monitoring were frequent and, because the state estimator relies heavily on input measurements, the state estimator performance was often affected by issues in the monitoring systems. As learned from demonstrations, a bombproof backup solution should always be available to overcome potential problems coming from missing or incorrect measurements. The robustness of the state estimator is critical for the online secondary controllers. Therefore, the focus of development should be given to the availability and accuracy of monitoring data instead of the state estimation algorithm itself. The handing of bad or missing data is extremely important because of the radial structure of the distribution grid and very few real-time measurement points compared to the number of estimated variables. Therefore, even one missing or bad piece of data may lead to very incorrect results and finally to an incorrect control decision.
Despite several challenges, the LV network state estimation demonstrations were successfully finalized. It was proven that the developed state estimation algorithm using the proposed automation system works quite properly and provides an improved view of the state of the network without a need to extend real-time monitoring to every corner of the LV grid. The average root means square error of voltage was 2.4 V (about 1% of nominal voltage), which is very low compared to the resolution of SMs (1 V) and the coverage of real-time measurements on customer connection points (< 20%).
Fig. 15 gives more detailed information about the accuracy of state estimation during different moments of a day. Measurements were realized during September 2016 when solar radiation was still strong enough in Northern Italy to have a remarkable impact for LV grid voltages. The uncertainty of PV output is clearly visible in Fig. 15 where daytime error is higher than average error. It is good to realize that the location of SMs is not optimized for state estimation, but other factors have instead been affecting those. The importance of a secondary substation (SS) voltage measurement for the accuracy of state estimation is visualized in the figure too. It is the most important single measurement for the state estimation, which must be available. Therefore, if voltage measurement is not available at a secondary substation, the nearest SM measurement might be used instead, but the addition of a more accurate PQ meter for the secondary substation is preferred. The trade-off between the benefits of more accurate state estimation and the required investments on more accurate and a higher number of measurements and more frequent reading of meters needs to be done for each DSO/investment case separately. Our demonstration in three different DSOs showed that state estimation of a European-style LV distribution grid is possible to realize today with existing algorithms, automation, and communication technology, and with reasonable investment and operational cost.

Fig. 16 provides similar results to Fig. 15 with an additional view by linking the node location (impedance between the node and secondary substation) and the accuracy of state estimation. It represents the case where secondary substation measurements (voltage and feeder currents) are available for the state estimation. The figure clearly indicates how the uncertainty of estimation results increases toward the tail parts of the radial feeders. This kind of analysis is needed to decide the location of additional measurement points if the accuracy is not acceptable. In this specific case, an additional voltage measurement from a PV unit located in the tail part of the feeder(s) would benefit the voltage estimation accuracy.

Fig. 17 gives an example of state estimation results compared to real-time measurements as a time series. Estimated voltage follows very well with the real-time measurement, although the estimation errors are also clearly visible.

5.2 Secondary voltage control results
The demonstration results confirm that the proposed and implemented secondary controller for congestion management operates in all the demonstration cases as expected, and that no adverse time domain operation occurs. The same controller is able to operate for MV and LV grids. Also, the results show that the algorithm is able to improve the defined KPIs (network losses, curtailed production, and over-voltage volume) with an increased number of control actions in all the demo cases. In general terms, it can be said that the weaker the network and the larger the amount of generation connected to it, the larger the benefits of the secondary controller. The annual benefits of the secondary controller have been evaluated in [22], which shows that the secondary controller is able to both prevent voltage and current congestions and to decrease the annual network losses. The integration of an MV secondary controller and a LV secondary controller was also effective and resulted in correct operation interactions of MV and LV secondary controllers. Graded time delays of the AVC relays seem to be an adequate measure to prevent back-and-forth operations of control in most cases [37].
In the Unareti case, an extract of the secondary voltage control operation during the 15-day test-period is presented here. Fig. 18 presents network voltages on a given test day. It can be noticed, on this day as well in the remaining testing campaign of the secondary voltage control, that no voltage violations outside the acceptable voltage range (± 5%) have been observed due to the current penetration of the PV generation in the network. As a consequence, during the demonstration of the available controllable resources in the network, six PV inverters have been utilized with the goal of reducing reactive power flows and, thus, network losses. Fig. 19 reports an example of the reactive power profiles of controlled resources during the testing campaign. Utilization of a small scale of reactive power has a minor effect on network voltages due to the reactance/resistance ratio of lines in LV networks. In the Unareti case, the cost function was set to minimize network losses where the effect of reactive power flows can be seen. The secondary voltage control realized totally 43 setpoint changes for six PV inverters during the whole 15-day test period. This demonstration confirms that the secondary voltage control has been successfully installed, and setpoints of available controllable resources have been successfully altered in real LV distribution network operations.


Several hardware and software in the loop tests were realized in the integration laboratories of RWTH and TUT. These laboratories were utilized to test the functionality of algorithms prior to field demonstration, to realize nonfunctional tests for a complete automation system, and to extend the testing of developed control methods beyond the capabilities of a field demonstration site. The secondary voltage control algorithm, which is based on OPF, implemented in both MV and LV grids is based on [23]. A weighted least squares-based state estimation [38] is used to provide necessary input, which includes phase voltages of each network node, branch currents, and real and reactive powers of each load and production node. Full network topology information is available in the SAU database. The secondary voltage control can utilize multiple types of controllable resources that have a primary controller (IED) and an interface to the SAU database implemented. Real and reactive power setpoints of DG units, reactive power setpoints of reactive power compensation devices, real power setpoints of controllable loads, and voltage reference setpoints to AVC relays of OLTCs are the controllable resources that can be currently utilized. The algorithm aims to minimize the objective function in Eq. (1), where Closses is the cost for network losses Plosses, Ccur is the cost for generation curtailment ∑ Pcur, Ctap is the cost for tap changer operations ntap,CDR is the cost for load control ∑ PDR, and Cvdiff is the cost for voltage deviation from nominal on all nodes, ∑(Vi,r − Vi)2. Network constraints and load flow equations are taken into account in the optimization. The problem is a mixed-integer nonlinear programming problem, which is solved by sequential quadratic programming in Octave due to demonstration constraints.
In real-time simulations, the algorithms are executed once a minute. Real-time monitoring of a distribution network provides necessary measurement data from selected SMs and IEDs. [31] State estimation is run first, followed by a voltage control algorithm. In order to avoid oscillation between the simultaneous real-time control of MV and LV networks, some sort of coordination is required among the secondary controllers. This can be either implemented using blocking signals or using graded time delays of AVC relay control loops of OLTCs. When using blocking signals, the reason for voltage variations needs to be originated first. For instance, with a blocking signal from an upper-level SAU to a lower-level SAU, the operation of OLTC and the voltage-control algorithm can be delayed until the upper-level algorithm has finished its control actions; thus unnecessary control actions can be avoided. In these studies, graded time delays alone proved to avoid unnecessary OLTC actions but clashing voltage reference setpoints were found to be set simultaneously on the MV and LV levels, which needed to be reverted later on. To prevent this from happening, the execution of algorithms is staggered within the 1-min timeframe.
The simulation network model represents a real MV and LV distribution network of Unareti's demonstration site. The model consists of one primary substation, two MV feeders, a secondary substation, and six LV feeders. Controllable resources in the network include HV/MV OLTC at the primary substation and MV/LV OLTC at the secondary substation, each controlled by an AVC relay, six controllable PV units in the LV network, and one DG in the MV network. Static constant power loads represent customers in all LV network nodes and in some MV network nodes. The automation system consists of two SAUs, both running on the same Linux computer. With RTDS, all calculations are performed in real time, which enables the connection of commercial monitoring and control IEDs to the simulation environment. The AVC relay at the secondary substation, and two SMs measuring two critical load nodes in the LV network, are connected to the simulator. A dedicated Windows computer runs an instance of MATLAB to provide two-way communication between the databases and algorithms regarding measurements and setpoints of the modeled AVC relay and PV units within the RTDS model.
As an example, two simulation sequences are presented. The first simulation sequence represents varying loading of the feeding network and thus voltage variations that take place downstream in the network. In the simulation, the primary substation feeding network voltage was varied with the following sequence (time instant and voltage): 0:00 (23.0 kV), 1:45 (23.5 kV), 3:45 (23.0 kV), and 5:15 (23.3 kV). The combined operation of the MV and LV secondary voltage control with incorporated graded OLTC delays were simulated.
In Fig. 20, the MV and LV simulation sequence graphs are reported. The changes made by the sequence to the network are highlighted with numbers in the figures explaining the sequence. Other visible voltage variations are due to control actions in the network. When the voltage remained outside the reference values at the substation, the optimization was first blocked in order to allow tap changer operations to take effect. Tap changer delays at the primary substation were set to a half value of the secondary substation's tap changer delay. The algorithms were executed sequentially every minute, LV algorithms first at the beginning of every minute, followed by MV algorithms 30 s later. The control actions made by both secondary voltage controllers were therefore visible for both the OPF algorithms via real-time measurements collected before the run of the OPF.


In the second simulation scenario, the output of all PV units is varied according to the real data of the PV output throughout a 24-h scenario, depicted in Fig. 21. The nominal powers of the real network's PV units have been multiplied by a factor of 3 in order to create congestions in the network.

From Fig. 22, the conclusion can be drawn that the voltage variations are handled at the LV network portion where the effect of PV output in voltages is mainly seen. With the higher, artificial penetration of the PV varying between 30% and 100% of output, many changes to the secondary substation AVC relay voltage reference setpoint can be observed during mid-day. The reactive power of PV units is not controlled in order to see better how OLTCs perform. Therefore, tap changer actions according to the fourth graph in Fig. 22 have also been made.


The algorithm is by default tuned to have a cost for voltage difference from nominal set to zero, and thus to optimize voltages closer to the upper voltage limit. Therefore, with 30% PV output during the middle of the day, and following a substantial increase to the 100% output, over-voltages are observed. These over-voltages, however, are always corrected after the next algorithm execution by setting a new, lower voltage reference value. This increases the number of tap changer operations and the need for maintenance. By changing the algorithm setting parameters to aim for voltages closer to nominal, usually at the cost of network losses, the over-voltages in the scenarios could be avoided.
6 The role of the aggregator in the IDE4L automation architecture
The possible roles of the aggregator in support of the network operation, beyond the business models and features of aggregators currently operating in some European energy markets, are implied in [10]. Various European projects have investigated and developed schemes of operation and business models for the aggregator. From the technical point of view, a detailed development was produced by the project IDE4L and demonstrated in the lab.
An example of operation of the aggregator is presented in [39,40].
The aggregator manages the individual consumers with a two-layer communication-based control architecture. The lower layer is located on the level of the EMS of the customer. Upon request, such EMS sends the baseline and flexibility availability to the aggregator, timely enough to fairly allocate the flexibility burden, in the form of power setpoints, depending on individual flexibility. The upper layer instead only checks the point of common coupling of the customer. This is where the aggregator's central manager corrects the aggregated power consumption by reallocating individual target flexibilities from consumers incapable of delivering to those who are. The simple flexibility activation scheme is pro-rata, and curtailment is allocated proportionally to customers’ volume availabilities.
The main challenge from the operative point of view is to reduce the gap between the requested flexibility and the actual delivered one. In our implementation we considered the flexibility successfully delivered if it is included in a 20% tolerance band. Right now the flexibility is divided evenly among the customers, only based on the declared flexibility available. However, it could be optimized, for example, assigning the flexibility based on the customer's “thrust score,” meaning how much the customer followed the requested setpoints in the past (this would require an evaluation of the customer's past performances), thus incentivizing virtuous customers. Another way to optimize the flexibility activation among the customers would be assigning the biggest amount of flexibility to the “cheaper” customers first. This would require the definition of a cost function that could be based on the actual cost of (maximizing the aggregator revenue) or other kinds of costs, such as a performance-related cost or, for example, trying to give an advantage to customers who have smaller delays in actuating the required setpoints.
Because the performances of the customers, like delays in actuating the setpoints or how much they move away from the requested setpoint, have an effect on the final result (the one that concerns the DSO), this strategy could improve the overall performance of the aggregator in reaching flexibility delivery and thus improve the benefits for the DSO.
From the implementation point of view, the communication between customers and aggregators has a major role. Because the whole strategy is based on a continuous exchange of data between the aggregator and its customers, it is crucial to have a reliable communication infrastructure. On the other hand, interactions between the aggregator and DSO are less intensive. However, in this case the timing and intervals of such interaction have an impact on the overall performances of the flexibility delivery. The aggregator strategy includes a certain time window, defined as the flexibility delivery check window, which is the elapsed time between two energy measurement requests sent to the customers. These two measurements are used to calculate the actual energy consumed by the customer during this time window and compare it with declared base energy consumption, expected if no flexibility is activated.
In our simulations we analyzed how different configurations of the flexibility allocation strategy timing, obtained by changing the width of the flexibility delivery check window, affect the performances. Furthermore, we repeated the simulations, adding delays in the response of customers in actuating the required setpoint, thus evaluating the effect of such delays in the performances both at the customer and aggregator level.
The test cases were the following:
| Case | Window (min) | Delay |
|---|---|---|
| 1.a | 3 | No delay |
| 1.b | 3 | With delay |
| 2.a | 4 | No delay |
| 2.b | 4 | With delay |
| 3.a | 5 | No delay |
| 3.b | 5 | With delay |
| 4.a | 6 | No delay |
| 4.b | 6 | With delay |
As shown in Figs. 23 and 24, the different delivery check window configurations affect both the profile of the active power consumption and of the activated flexibility. Moreover, the overall performances of the aggregator decrease with the wider windows, with the 3 min window giving the best performances and with the 2 min window being still able to deliver the required flexibility within the 20% tolerance band. Finally, the percentage of performing customers decreases with wider windows.


In the presence of delays, the performances decrease for each flexibility check window configuration and only in case 1.b are the performances still good enough to consider the flexibility successfully delivered, as reported in Fig. 25.

Another implementation challenge is the modeling of the behavior of the customers. For our implementation we created, power profiles for each customer based on real data coming from a DSO, and eventually added some delays in the acceptance and execution of the setpoints sent by the aggregator. However, the modeling of the customers could be improved by adding some variability factors on such profiles and on the acceptance of the flexibility by the customers. By doing so and running a series of simulations, thus analyzing a wider set of possible scenarios, it could be possible to better validate the effects of different timing strategies on the flexibility activation and execution as well as the effects of the delays.
7 Conclusions
Based on three successful field and six laboratory demonstrations, we may conclude that the proposed concepts, automation architecture, and functionalities work as expected. The following paragraphs highlight the general conclusions of the IDE4L project demonstrations, from different players perspective.
In reference to what has been explained in Section 1.1, the most relevant exploitable results for a DSO are the following.
- • Network real-time monitoring. Despite the fact that, in some EU Countries electronic meters have been already deployed, an LV network cannot be monitored by the DSO. Within the IDE4L project, SMs were utilized as sensors to monitor and control the LV network by the DSO to increase the hosting capacity of the LV network for RES/DER.
- • Load and production forecast. Several authorities are asking DSO to forecast—on the short and medium term—the DG production on the MV and LV levels to understand the real impact of renewable generation the distribution network. The algorithm tested in the project has been proven to have a balanced trade-off between complexity of use and accuracy and can be used for such a purpose on a larger scale.
- • State estimation and power control. Those are two important bricks in the supervision on today's distribution network. Based on the real-time monitoring and the forecast of load and productions, they allow the determination of the overall network status—identifying congestions—and mitigate them through control actions.
- • FLISR and MV monitoring. FLISR solutions—because they have an immediate impact on quality of service indicators and though incomes for the DSOs—are in the stage of moving from a pilot project to deployment projects. Tests like those done during the IDE4L project make the business case more solid. The feature of remote reconfiguration of the protection device when the network topology changes allows for a maximization of the investment because the protection system can be used not only in the standard configuration, but even after a fault. We expect to buy IEDs like those tested during the project.
- • Standards. Standards like the 61,850 and the CIM are becoming more and more a core part of our business. We are currently redesigning the data model for our asset management system and the new one will be based on the CIM standard (to be completed by December 2016). We recently released (May 2016) the technical specification for the primary substation automation systems and those specifications mandate full compliance with the 61,850. The use of the DLMS/COSEM makes the application of the “smart meters as a sensor” concept easily exploitable.
It is worth pointing out the replicability of the proposed solution. The three DSOs partners of IDE4L represent urban and rural networks in different parts and countries of Europe. Demonstration grids also include relatively high penetration of RESs connected to a LV grid. The same IDE4L automation system was implemented in all field demonstration sites. Results prove it effective in the different configurations (functionalities chosen by the DSO) and hardware implementations that were tested. Because the IDE4L solutions work in this variety of conditions, they are expected to be suitable for most of the EU.