
Introduction
Up to now, industrial robots have drastically rationalized many kinds of manufacturing processes in industrial fields. The user interface provided by the robot maker has been almost limited to so-called teaching pendant. The teaching pendant is a useful and safe tool to obtain the position and orientation at the tip of a robot along a desired trajectory, but the teaching is very complicated and time-consuming task. In particular, when the target trajectory is a free curved line, many through points must be given to acquire a smooth trajectory; the task is therefore not an easy one.
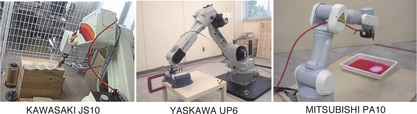
This decade, open-architecture industrial robots as shown in Fig. 1 have been produced by several industrial robot makers in Japan such as KAWASAKI Heavy Industries, Ltd., MITSUBISHI Heavy Industries, Ltd., YASKAWA Electric Corp., and so on. Open architecture, as described in this book, means that the servo system and kinematics of the robot are technically opened, so that various applications required in industrial fields are allowed to be planned and developed at the user side. For example, non-taught operation using a CAD/CAM system can be considered due to the opened accurate kinematics. Also, force control strategy using a force sensor can be implemented due to the technically-opened servo system.
In this book, a position/force control system is first designed for articulated-type industrial robots with an open-architecture controller and desktop-size NC machine tools. The position and orientation of the tool attached to the tip of an industrial robot are controlled based on a model designed by a CAD/CAM. Cutter location data generated from the main-processor of CAM are used to achieve the desired position and orientation. In addition, the force quantity (including kinetic friction) is controlled through a desired impedance model. Both manipulated values generated from the position control system and the force control system are velocity quantity in a Cartesian-coordinate system, so that the hybrid position/force control system can be easily applied to industrial robots with an open-architecture controller.
In the second chapter, a velocity-based discrete-time control system with intelligent control concepts is proposed for open-architecture industrial robots. In the third chapter, a preliminary simulation of intelligent force control is conducted and the effectiveness is theoretically evaluated. Then, in the fourth chapter, a CAM system for articulated-type industrial robots is proposed from the viewpoint of a robotic servo controller. Passive force control methods are designed using the inner servo system. At the beginning of the fifth chapter, the hybrid position/force control scheme is explained in detail. The proposed controller can be applied to industrial machineries with an open-architecture controller such as an articulated-type industrial robot and an orthogonal-type robot. The orthogonal-type robot is also called a Cartesian-type robot or desktop-size NC machine tool.
From Chapter 5, we introduce four examples of applications being utilized in actual manufacturing process. The first one is the 3D robot sander which sands the free-formed surface of wooden materials. The finished wooden workpiece with a curved surface is used for a part in constructing a piece of artistic furniture. The second one is a 3D machining system for artistic wooden paint rollers. The carved paint roller can produce an artistic relief wall. The third one is the mold polishing robot which finishes aluminum PET bottle blow molds with curved surfaces. The application limit of articulated-type industrial robots is quantitatively evaluated through a simple static position/force measurement. The fourth example is a novel desktop orthogonal-type robot with higher resolutions of position and force to finish a smaller workpiece such as an LED lens cavity which conventional articulated-type industrial robots have not been able to deal with. After the basic position/force control performance is shown, present research progress and promising applications are introduced.