5.5. Two-Stage Training Algorithms
The convergence behavior of the BP algorithm for multi-layer networks has always been an issue of great concern. This is because the algorithm tends to be sensitive to initial conditions. Therefore, the convergence problem can be greatly alleviated if proper initial conditions can be estimated. This motivates the two-stage training strategy discussed next.
5.5.1. Two-Stage Training for RBF Networks
The two-stage training of RBF networks starts with the estimation of the kernel means using the K-means algorithm
Equation 5.5.1
![]()
Equation 5.5.2

where
Equation 5.5.3
![]()
Nj is the number of patterns in the cluster Xj, and || · || is the Euclidean norm. After the kernel parameters are determined, the kernel outputs {φj (x(n)); j = 0,'…, M} are computed using the input/teacher training pairs {x(n), d(n)} to form the matrix equation
Equation 5.5.4
![]()
where
Therefore, the training of the output weights amounts to finding the inverse of Φ. However, in most cases, Φ is not a square matrix. For a small amount of training data, a reliable way to solve Eq. 5.5.4 is to use the technique of singular value decomposition [285]. In this approach, the matrix Φ is decomposed into the product UΛVT, where U is an N x (M + 1) column-orthogonal matrix, Λ is an (M + 1) x (M + 1) diagonal matrix containing the singular values, and V is an (M + 1) x (M + 1) orthogonal matrix. The weight vectors ![]() are given by
are given by
Equation 5.5.5
![]()
where dk is the k-th column of D and Λ = diag{λ0, …, λM} contains the singular values of Φ. To ensure numerical stability, set 1/λi to zero for those λi less than a machine-dependent precision threshold. This approach effectively removes the effect of the corresponding dependent columns in Φ. For an over determined system, singular value decomposition gives a solution that is the best approximation in the least squares sense. On the other hand, when the amount of training data are sufficiently large to ensure that Φ is of full rank, the squared error between the actual output and the desired output can be minimized:
![]()
to give the normal equations of the form
Equation 5.5.6
![]()
Compared to the gradient-based training scheme for multi-layer RBF networks described before, the two-stage training approach has two advantages:
Unlike the gradient-based approach, it is guaranteed that the basis functions are localized.
The training time of the two-stage approach is much shorter than the gradient-based approach because the training of the output weights becomes a least-squares problem, and there are efficient algorithms to determine the weights of the hidden-layer.
The error function E(wk) is quadratic with respect to the output weights. As a result, no local minimums of E(wk) exist.
Probabilistic Interpretation
Research has found that RBF networks are capable of estimating Bayesian posterior probabilities [311]. In fact, the link of RBF networks with statistical inference methods is more obvious than that of the LBF networks.
As noted in Section 5.2, each hidden neuron in an RBF network feeds the inputs into the radial basis function (Eq. 5.2.2) and generates the output using the Gaussian activation function (Eq. 5.2.4). For example, the output of the j-th neuron is given by
Equation 5.5.7
![]()
where x is a D-dimensional input vector. Usually the vector wj is a randomly selected input pattern, but it would be more efficient to use the mean vector to represent multiple patterns of the same cluster. Also, the spread parameter σ can be extended to a covariance matrix ∑ so that the neuron has more flexibility.
The network output k is a linear combination of the hidden neurons' outputs:
Equation 5.5.8
where w = {w1, w2, …, wM} are the parameters (means and covariances) of the M-hidden neurons, and πkj specifies the connection weight between output neuron k and hidden neuron j. Note that RBF networks are closely related to the Parzen windows approach [270] in that the estimated class-conditional densities are a linear superposition of window functions—one for each training pattern. Moreover, if the weighting parameters πjs follow the constraints ∑j πkj = 1 and πkj ≥ 0 ∀j and k, RBF networks are similar to the mixture of Gaussian distributions. Richard and Lippmann [311] have shown that if the output values of an RBF network are limited to [0,1], then with a large enough training set, the network outputs approximate the Bayesian posterior probabilities. Since most RBF learning schemes do not restrict the output values to [0,1], Bridle [35] suggested normalizing the outputs by a softmax-type function of the form:
Equation 5.5.9
According to Eq. 5.5.8, if fi (wj, x) is a density function,φk(w, x) will also be a density function. As a result, one can write the posterior probability of class ωk as
Equation 5.5.10
![]()
Comparing Eq. 5.5.9 with Eq. 5.5.10, one can see that the normalized RBF network outputs approximate the posterior probabilities with the assumption that p(ωi) = P(ωi) = P(ωj), ∀i, j.
RBF Networks versus EBF Networks
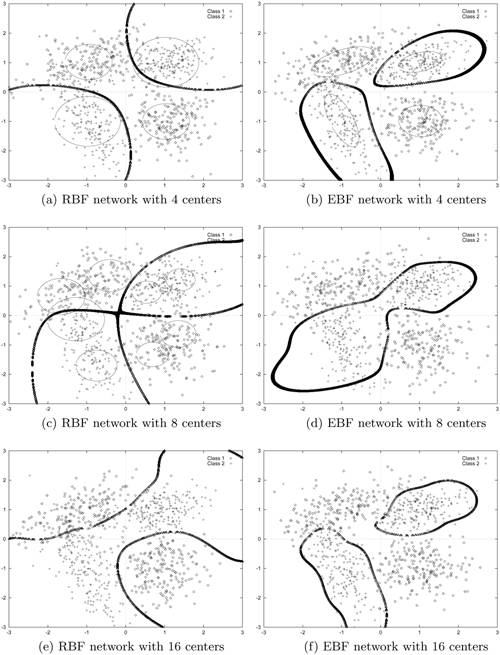
Notice that when ![]() in Eq. 5.4.10, the EBF network reduces to an RBF network. Although RBF networks have fewer parameters than EBF networks; their disadvantage is that they usually require a larger number of function centers to achieve similar performance [220]. The major reason is that, in EBF networks, each basis function has a full covariance matrix or a diagonal covariance matrix with different variances for each component, which forms a better representation of the probability density function; whereas in RBF networks, the distribution is modeled by a collection of diagonal covariance matrices with equal variances. Figure 5.7 shows the decision boundaries and contour lines of the basis functions formed by RBF and EBF networks with various numbers of function centers. The objective is to classify four Gaussian clusters with mean vectors and covariance matrices, as shown in Table 5.1, into two classes. This can be considered as a noisy XOR problem in which the noise components in the input domain are interdependent.
in Eq. 5.4.10, the EBF network reduces to an RBF network. Although RBF networks have fewer parameters than EBF networks; their disadvantage is that they usually require a larger number of function centers to achieve similar performance [220]. The major reason is that, in EBF networks, each basis function has a full covariance matrix or a diagonal covariance matrix with different variances for each component, which forms a better representation of the probability density function; whereas in RBF networks, the distribution is modeled by a collection of diagonal covariance matrices with equal variances. Figure 5.7 shows the decision boundaries and contour lines of the basis functions formed by RBF and EBF networks with various numbers of function centers. The objective is to classify four Gaussian clusters with mean vectors and covariance matrices, as shown in Table 5.1, into two classes. This can be considered as a noisy XOR problem in which the noise components in the input domain are interdependent.
Figure 5.7. Decision boundaries (thick curves) and contour lines of basis functions (thin circles or ellipses) produced by RBF and EBF networks with various numbers of centers. EBF networks' function centers and covariance matrices were found by the EM algorithm. Note: Only 1,200 test samples were plotted.
| Class 1 | Class 2 | ||
|---|---|---|---|
| Mean vector | Covariance matrix | Mean vector | Covariance matrix |
 |  |  |  |
 |  |  |  |
Figures 5.7(a) and 5.7(b) indicate that the boundaries formed by the EBF network with four centers are better for modeling the noise source characteristic than that formed by the RBF networks. Table 5.2 shows the recognition accuracy obtained by the RBF networks and the EBF networks. The accuracy is based on 2,000 test vectors drawn from the same population as the training set. The result demonstrates that the EBF networks can attain higher recognition accuracy than the RBF networks. It also suggests that increasing the size of the RBF networks could slightly increase recognition accuracy, but recognition accuracy is still lower than that of the EBF network with the smallest size (compare 90.57% with 91.14%). Increasing the number of function centers will also make the decision boundaries unnecessarily complicated, as shown in Figures 5.7(e) and 5.7(f).
| Number of Centers | RBF Network | EBF Network | ||
|---|---|---|---|---|
| Nrbf | Rec. accuracy | Nebf | Rec. accuracy | |
| 4 | 22 | 88.47% | 30 | 91.14% |
| 8 | 42 | 90.57% | 58 | 90.87% |
| 16 | 82 | 89.77% | 114 | 90.86% |
5.5.2. Two-Stage Training for LBF Networks
The two-stage training approach just discussed can also be applied to train multilayer LBF networks. Here a two-layer LBF network is used to illustrate the procedure. Recall from Section 5.4 that the outputs of a three-layer LBF network (i.e., L = 2) is
Equation 5.5.11

where f (·) is a nonlinear activation function.[2] In matrix form, Eq. 5.5.11 can be written as Y = XH, where Y is an N × K matrix, X is an N × D matrix, and H is an D × K matrix. The weight matrix W is the least-squares solution of the matrix equation
[2] For simplicity, the bias terms in Eq. 5.5.11 have been ignored.
Equation 5.5.12
![]()
where D is an N × K target matrix containing the desired output vectors in its rows.
As X is not a square matrix, its left-inverse is
Equation 5.5.13
![]()
So ideally, this is
Equation 5.5.14
![]()
Assuming that the number of hidden units M is less than that of the input, then H can be approximated by a rank M-matrix factorization:
Equation 5.5.15
![]()
where W(1) and W(2) are, respectively, D x M and M x K weight matrices corresponding to Layer 1 and Layer 2.
Suppose that the singular value decomposition of H = X-LD can be decomposed (approximately) into the product X-LD ≈ UΛVT, where U is a D x M column-orthogonal matrix, Λ is an M x M diagonal matrix containing the singular values, and V is an M x K orthogonal matrix. The weight matrix W(1) is given by W(1) = U, and the output of the hidden units will be f(XW(1)), where f(·) stands for the nonlinear activation function. Having derived the initial values for the hidden units, the derivation for the upper-layer W(2) follows the same approach as that adopted in the RBF case. In other words, the kernel outputs are again computed to form the matrix equation (5.5.4). Then, the output weights are computed using SVD.
Then,
which can be decomposed into

Hence, W(1) can be initialized to