Description
This class is the base class for tasks. Programmers are expected to derive classes from it and override the virtual method task*task::execute().
Each instance of task has associated attributes, which are described in Table 9-3. Although
they are not directly visible, they must be understood to fully grasp how task objects are used.
Warning
Always allocate memory for task objects using the special overloaded new operators provided by the library. Otherwise, results are undefined. Destruction of a task is normally implicit.
Table 9-3. Task attributes
|
Attribute |
Description |
|---|---|
|
|
The worker thread that is currently in charge of the task. |
|
|
Either |
|
| |
|
|
The number of tasks that have |
Notation
Some member descriptions illustrate the effects of running the methods by diagrams such as Figure 9-6.
Conventions in the diagram, such as Figure 9-6, are as follows:
Each task’s state is shown as a box divided into
parent, depth, andrefcountsubboxes.The arrow denotes the transition from the old state to the new state. Often, two objects take on a new state: the object that invokes the method
(this), and the object returned by the method (the result).Gray denotes a state that is ignored. Sometimes an ignored state is simply left blank.
Black denotes a state that is read.
Bold black with a thick box outline denotes a state that is written.
Members
In the following description, the types proxy1…proxy4 are internal types. Methods returning such types should be used only in conjunction with the special overloaded new operators.
namespace tbb {
class task {
protected:
task();
public:
virtual ~task() {}
virtualtask* execute() = 0;
// task allocation and destruction
static proxy1 allocate_root();
proxy2 allocate_continuation();
proxy3 allocate_child();
proxy4 allocate_additional_child_of( task& t );
// Explicit task destruction
void destroy( task& victim );
// Recycling
void recycle_as_continuation();
void recycle_as_child_of( task& parent );
void recycle_to_reexecute();
// task depth
typedef implementation-defined-signed-integral-type depth_type;
depth_type depth() const;
void set_depth( depth_type new_depth );
void add_to_depth( int delta );
// Synchronization
void set_ref_count( int count );
void wait_for_all();
void spawn( task& child );
void spawn( task_list& list );
void spawn_and_wait_for_all( task& child );
void spawn_and_wait_for_all( task_list& list );
static void spawn_root_and_wait( task& root );
static void spawn_root_and_wait( task_list& root );
// task context
static task& self();
task* parent() const;
bool is_stolen_task() const;
// task debugging
enum state_type {
executing,
reexecute,
ready,
allocated,
freed
};
int ref_count() const;
state_type state() const;
};
} // namespace tbb
void *operator new( size_t bytes, const proxy1& p );
void operator delete( void* task, const proxy1& p );
void *operator new( size_t bytes, const proxy2& p );
void operator delete( void* task, const proxy2& p );
void *operator new( size_t bytes, const proxy3& p );
void operator delete( void* task, const proxy3& p );
void *operator new( size_t bytes, proxy4& p );
void operator delete( void* task, proxy4& p );Task derivation
task is an abstract base class. You must override the task::execute method. It should perform the necessary actions for running the task and then return the next task to execute, or return NULL if the scheduler should choose the next task to execute. Typically, if non-NULL, the returned task is one of the children of this. Unless one of the recycle/reschedule methods is called while the execute method is running, the this object will be implicitly destroyed after execute returns.
The derived class should override the virtual destructor if necessary to release resources allocated by the constructor.
Processing of execute( )
When the scheduler decides that a thread should begin executing a task, it performs the following steps:
It invokes
execute()and waits for it to return.If the task has not been marked for recycling by one of the
recycle_*methods, it checks the task’sparent. If theparentis non-NULL, it atomically decrementsparent-> refcount, and if it becomes zero, it puts theparentinto the ready pool.It calls the task’s destructor.
It frees the memory used by the task.
If the code has reached this point, the task has been marked for recycling. If it was marked by
recycle_to_reexecute, the scheduler puts the task back into the ready pool. Otherwise, the task was marked byrecycle_as_childorrecycle_as_continuation. (See the section “Recycling tasks,” later in this chapter.)
Task allocation
Always allocate memory for task objects using one of the special overloaded new operators. The allocation methods do not construct the task. Instead, they return a proxy object that can be used as an argument to an overloaded version of new provided by the library.
In general, the allocation methods must be called before any of the tasks allocated are spawned. The exception to this rule is allocate_additional_child_of(t), which can be called even if task t is already running. The proxy types are defined by the implementation. Because these methods are used idiomatically, the headings in the subsection show the idiom, not the declaration. The argument this is typically implicit, but it is shown explicitly in the headings to distinguish instance methods from static methods.
-
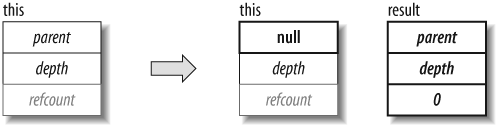
new(task::allocate_root())T Effects: allocates a task of type
Twith a depth that is one greater than the depth of the innermost task currently being executed by the current native thread. Figure 9-7 summarizes the state transition.Use the
spawn_root_and_waitmethod to execute the task.-
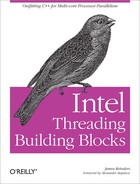
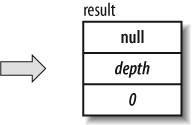
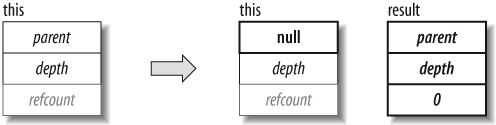
new(this.allocate_continuation())T Effects: allocates and constructs a task of type
Tat the same depth asthis, and transfers the parent fromthisto the new task. No reference counts change. Figure 9-8 summarizes the state transition.-
new(this.allocate_child())T Effects: allocates a task with a depth that is one greater than
this, withthisas its parent. Figure 9-9 summarizes the state transition.If you are using explicit continuation passing, call the allocation method from the continuation, not the parent, so that the
parentmember is set correctly. The taskthismust be owned by the current thread.If the number of tasks is not a small fixed number, consider building a
task_listof the children first and spawning them with a single call totask::spawn. If a task must spawn some children before all are constructed, it should usetask::allocate_ additional_child_of(*this)instead because that method atomically incrementsrefcountso that the additional child is properly counted. However, if using this procedure, the task must protect against premature zeroing ofrefcountby using a blocking-style task pattern (as was shown in Figure 9-2).-
new(this.task::allocate_additional_child_of(parent)) Effects: allocates a task as a child of another task,
parent. The result becomes a child ofparent, notthis. The parent may be owned by another thread and may already be running or have other children running. The task objectthismust be owned by the current thread, and the result has the same owner as the current thread, not the parent. Figure 9-10 summarizes the state transition.

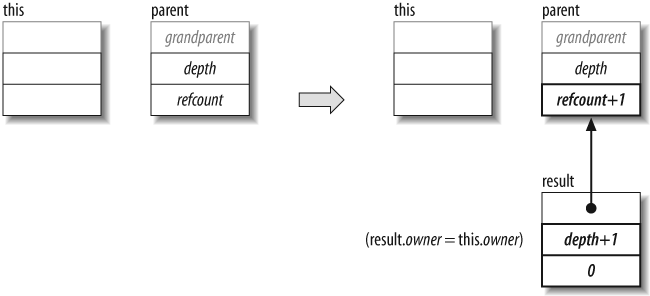
Because parent may already have running children, the increment of parent.refcount is thread-safe (unlike the other allocation methods, where the increment is not thread-safe). When adding a child to a parent with other children running, it is up to the programmer to ensure that the parent’s refcount does not prematurely reach 0 and trigger execution of the parent before the child is added.
Explicit task destruction
Usually, a task is automatically destroyed by the scheduler after its execute method returns. But sometimes task objects are used idiomatically (e.g., for reference counting) without ever running execute. Such tasks should be disposed of with the destroy method.
-
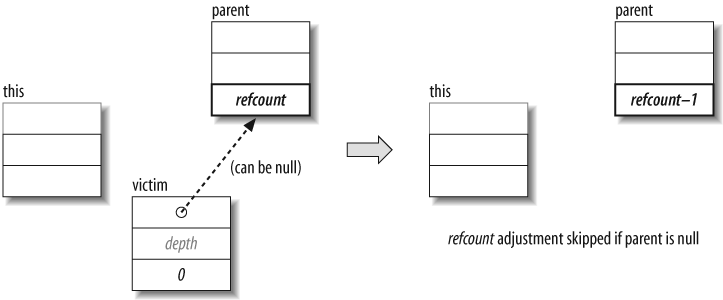
void destroy(task&victim) Requirements: the reference count of
victimshould be0. This requirement is checked in the debug version of the library. The calling thread must ownthis.Effects: calls the victim object’s destructor and deallocates its memory. If
thishas a non-NULL parent, the method atomically decrementsparent->refcount. The parent is not put into the ready pool ifparent->refcountbecomes0. Figure 9-11 summarizes the state transition.
The implicit argument this is used internally, but it is not visibly affected. A task is allowed to destroy itself, so this->destroy(*this) is permitted unless the task has been spawned but has not yet completed its execute method.
Recycling tasks
It is often more efficient to recycle a task object than it is to reallocate one from scratch. Often, the parent can be reused as the continuation of one of its children.
-
void recycle_as_continuation() Requirements: must be called while
executeis running.The
refcountfor the recycled task should be set to the number of current children of the continuation task.The caller must guarantee that the task’s
refcountdoes not become0until afterexecutereturns. If this is not possible, use the methodrecycle_as_safe_continuation()instead, and setrefcountto one greater than the number of current children of the continuation task.Effects: causes
thisnot to be destroyed when its execute method returns.-
void recycle_as_safe_continuation() Requirements: must be called while
executeis running.The
refcountfor the recycled task should be set to one greater than the number of children of the continuation task. The additional one represents the task to be recycled.Effects: causes
thisnot to be destroyed when itsexecutemethod returns.This method avoids race conditions that can arise from using the method
recycle_as_continuation. The race occurs when all of the following take place:The task’s
executemethod recyclesthisas a continuation.The continuation creates children.
All the children finish before the original task’s
executemethod completes so that the continuation executes before the scheduler is done runningthis. The out-come is a corrupted scheduler.
The
recycle_as_safe_continuationmethod avoids this race condition because the additional one in therefcountprevents the continuation from executing until the task completes.-
void recycle_as_child_of(task&parent) Requirements: must be called while
executeis running.Effects: causes
thisto become a child ofparentand not be destroyed whenexecutereturns.-
void recycle_to_reexecute() Requirements: must be called while
executeis running. execute must return a pointer to another task.Effects: causes
thisto be automatically spawned afterexecutereturns.
Task depth
For general fork-join parallelism, there is no need to explicitly set the depth of a task. However, in specialized task patterns that do not follow the fork-join pattern, it may be useful to explicitly set or adjust the depth of a task.
-
depth_type The type
task::depth_typeis an implementation-defined, signed integral type.-
depth_typedepth()const Returns: current
depthattribute for the task.-
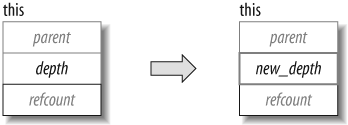
void set_depth(depth_typenew_depth) Requirements: the value
new_depthmust be non-negative.Effects: sets the
depthattribute of the task tonew_depth. Figure 9-12 shows the effects.-
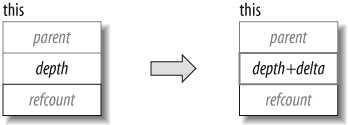
void add_to_depth(int delta) Requirements: the task must not be in the ready pool. The sum
depth+deltamust be non-negative.Effects: sets the
depthattribute of the task todepth+delta. Figure 9-13 illustrates the effect. The update is not atomic.
Synchronization
Spawning a task either causes the calling thread to invoke task.execute(), or causes task to be put into the ready pool. Any thread participating in task scheduling may then acquire the task and invoke task.execute(). The calls that spawn tasks come in two forms:
Calls that spawn a single task.
Calls that spawn multiple task objects specified by a
task_listand thenclear task_list.
The calls distinguish between spawning root tasks and child tasks. A root task is one that is created using the allocate_root method.
Warning
A task should not spawn any child until it has called set_ref_count to indicate both the number of children and whether it intends to use one of the wait_for_all methods.
-
void set_ref_count(int count) Requirements:
countmust be greater than0. If the intent is to subsequently spawnnchildren and wait,countshould ben+1. Otherwise, count should ben.Effects: sets the
refcountattribute tocount.-
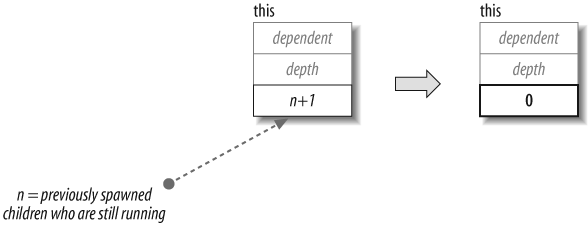
void wait_for_all() Requirements:
refcount=, wheren+1nis the number of children still running.Effects: executes tasks in the ready pool until
refcountis1. Afterward, setsrefcountto0. Figure 9-14 summarizes the state transitions.-
void spawn(task&child) Requirements:
child.refcountmust be greater than0. The calling thread must ownthisandchild.Effects: puts the task into the ready pool and immediately returns. The
thistask that does the spawning must be owned by the caller thread. A task may spawn itself if it is owned by the caller thread. If no convenient task owned by the current thread is handy, usetask::self().spawn(task)to spawn the child.The parent must call
set_ref_countbefore spawning any child tasks because once the child tasks are going, their completion will causerefcountto be decremented asynchronously. The debug version of the library detects when a required call toset_ref_countis not made, or is made too late.-
void spawn(task_list&list) Requirements: for each task in
list,refcountmust be greater than0. The calling thread must own the task invoking the method and each task inlist. Each task inlistmust have the same value for itsdepthattribute.Effects: equivalent to executing
spawnon each task inlistand clearing list, but more efficient. Iflistis empty, there is no effect.-
void spawn_and_wait_for_all(task&child) Requirements: any other children of
thismust already be spawned. The taskchildmust have a non-NULL parentattribute. There must be a chain of parent links from the child to the calling task. Typically, this chain contains a single link. That is,childis typically an immediate child ofthis.Effects: similar to
{spawn(task); wait_for_all();}, but often more efficient. Further-more, it guarantees that task is executed by the current thread. This constraint can sometimes simplify synchronization. Figure 9-15 illustrates the state transitions.-
void spawn_and_wait_for_all(task_list&list) Effects: similar to
{spawn(list); wait_for_all();}, but often more efficient.-
static void spawn_root_and_wait(task&root) Requirements: the memory for task
rootmust have been allocated bytask::allocate_ root(). The calling thread must ownroot.Effects: sets the
parentattribute ofrootto an undefined value and executesroot. Destroysrootafterward unless it was recycled.-
static void spawn_root_and_wait(task_list&root_list) Requirements: each task object in
root_listmust meet the requirements for the parameterroot of spawn_root_and_wait().Effects: for each task object
tinroot_list, performsspawn_root_and_wait(t), possibly in parallel.

Task context
These methods expose relationships among task objects, and between task objects and the underlying physical threads:
-
static task& self() Returns: reference to the innermost task that the calling thread is executing.
-
task* parent() const Returns: value of the
parentattribute. The result is an undefined value if the task was allocated byallocate_rootand is currently running under control ofspawn_root_and_ wait.-
bool is_stolen_task() const Requirements: the attribute
parentmust be non-NULLandthis.execute()must be running. The calling task must not have been allocated withallocate_root.Returns:
trueif the attributeownerof this is unequal to theownerofparent.
Task debugging
Methods in this subsection are useful for debugging. They may change in future implementations.
-
state_type state() const Returns: current state of the task. Table 9-4 describes valid states. Any other value is the result of memory corruption, such as caused by using a task whose memory has been deallocated. Figure 9-16 summarizes possible state transitions for a task.
Warning
This method is intended for debugging only. Its behavior or performance may change in future implementations. The definition of
task::state_typemay also change in future implementations. The information in this section is provided because it can be useful for diagnosing problems during debugging.Table 9-4. Values returned by task::state()
Value
Description
allocatedThe task is freshly allocated or recycled.
readyThe task is in the ready pool, or is in the process of being transferred to or from the pool.
executingThe task is running, and it will be destroyed after its
executemethod returns.freedThe task is on the internal free list, or is in the process of being transferred to or from the list.
reexecuteThe task is running, and will be respawned after its
executemethod returns.-
int ref_count() const Returns: the value of the attribute
refcount.
