
Maze pathfinding can be used effectively in many types of games, such as side-scrolling platform games or top-down, gauntlet-like games. The point is to find the shortest viable path from one point on the map to another. This can be used for moving NPCs and players as well.
This recipe will use a simple maze environment to find a path starting at the start point and ending at the exit point. You can either prepare one by yourself or let the computer create one for you. A map will be represented by a 2D-map structure where each cell will consist of a cell type and cell connections. The cell type values are as follows:
- 0 means a wall
- 1 means an empty cell
- 2 means the start point
- 3 means the exit point
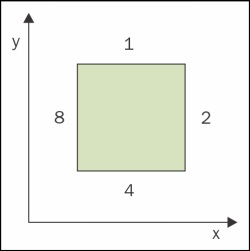
Cell connections will use a bitmask value to get information about which cells are connected to the current cell. The following diagram contains cell connection bitmask values with their respective positions:
Now, the quite common problem in programming is how to implement an efficient data structure for 2D maps. Usually, this is done either with a relatively large one-dimensional array or with an array of arrays. All these arrays have a specified static size, so map dimensions are fixed. The problem arises when you use a simple 1D array and you need to change the map size during gameplay or the map size should be unlimited. This is where map cell indexing comes into place. Often you can use this formula to compute the cell index from 2D map coordinates:
local index = x + y * map_width map[index] = value
There's nothing wrong with this approach when the map size is definite. However, changing the map size would invalidate the whole data structure as the map_width variable would change its value. A solution to this is to use indexing that's independent from the map size. This way you can ensure consistent access to all elements even if you resize the 2D map.
You can use some kind of hashing algorithm that packs map cell coordinates into one value that can be used as a unique key. Another way to accomplish this is to use the Cantor pairing function, which is defined for two input coordinates:

Index value distribution is shown in the following diagram:
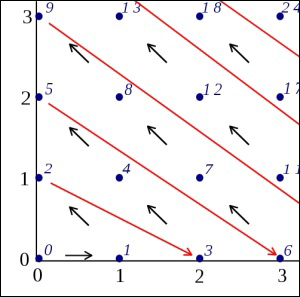
The Cantor pairing function ensures that there are no key collisions no matter what coordinates you use. What's more, it can be trivially extended to support three or more input coordinates. To illustrate the usage of the Cantor pairing function for more dimensions, its primitive form will be defined as a function cantor(k1, k2), where k1 and k2 are input coordinates. The pairing function for three dimensions will look like this:
local function cantor3D(k1, k2, k3) return cantor(cantor(k1, k2), k3) end
Keep in mind that the Cantor pairing function always returns one integer value. With higher number of dimensions, you'll soon get very large values in the results. This may pose a problem because the Lua language can offer 52 bits for integer values. For example, for 2D coordinates (83114015, 11792250) you'll get a value 0x000FFFFFFFFFFFFF that still can fit into 52-bit integer values without rounding errors. The larger coordinates will return inaccurate values and subsequently you'd get key collisions. Value overflow can be avoided by dividing large maps into smaller ones, where each one uses the full address space that Lua numbers can offer. You can use another coordinate to identify submaps.
This recipe will use specialized data structures for a 2D map with the Cantor pairing function for internal cell indexing. You can use the following code to prepare this type of data structure:
function map2D(defaultValue)
local t = {}
-- Cantor pair function
local function cantorPair(k1, k2)
return 0.5 * (k1 + k2) * ((k1 + k2) + 1) + k2
end
setmetatable(t, {
__index = function(_, k)
if type(k)=="table" then
local i = rawget(t, cantorPair(k[1] or 1, k[2] or 1))
return i or defaultValue
end
end,
__newindex = function(_, k, v)
if type(k)=="table" then
rawset(t, cantorPair(k[1] or 1, k[2] or 1), v)
else
rawset(t, k, v)
end
end,
})
return t
endThe maze generator as well as the pathfinding algorithm will need a stack data structure. For more information, refer to the Making a stack recipe from Chapter 1, Basics of the Game Engine.
This section is divided into two parts, where each one solves very similar problems from the perspective of the maze generator and the maze solver.
You can either load a maze from a file or generate a random one. The following steps will show you how to generate a unique maze.
First, you'll need to grab a maze generator library from the GitHub repository with the following command:
git clone https://github.com/soulik/maze_generator
This maze generator uses the depth-first approach with backtracking.
You can use this maze generator in the following steps. First, you'll need to set up maze parameters such as maze size, entry, and exit points.
local mazeGenerator = require 'maze'
local maze = mazeGenerator {
width = 50,
height = 25,
entry = {x = 2, y = 2},
exit = {x = 30, y = 4},
finishOnExit = false,
}The final step is to iteratively generate the maze map until it's finished or a certain step count is reached. The number of steps should always be one order of magnitude greater than the total number of maze cells mainly due to backtracking. Note that it's not necessary for each maze to connect entry and exit points in this case.
for i=1,12500 do
local result = maze.generate()
if result == 1 then
break
end
endNow you can access each maze cell with the maze.map variable in the following manner:
local cell = maze.map[{x, y}]
local cellType = cell.type
local cellConnections = cell.connectionsThis recipe will show you how to use a modified Trémaux's algorithm, which is based on depth-first search and path marking. This method guarantees finding the path to the exit point if there's one. It relies on using two keys in each step: current position and neighbors.
This algorithm will use three state variables—the current position, a set of visited cells, and the current path from the starting point:
local currentPosition = {maze.entry.x, maze.entry.y}
local visistedCells = map2D(false)
local path = stack()The whole maze solving process will be placed into one loop. This algorithm is always finite, so you can use the infinite while loop.
-- A placeholder for neighbours function that will be defined later
local neighbours
-- testing function for passable cells
local cellTestFn = function(cell, position)
return (cell.type >= 1) and (not visitedCells[position])
end
-- include starting point into path
visitedCells[currentPosition] = true
path.push(currentPosition)
while true do
local currentCell = maze.map[currentPosition]
-- is current cell an exit point?
if currentCell and
(currentCell.type == 3 or currentCell.type == 4) then
break
else
-- have a look around and find viable cells
local possibleCells = neighbours(currentPosition, cellTestFn)
if #possibleCells > 0 then
-- let's try the first available cell
currentPosition = possibleCells[1]
visitedCells[currentPosition] = true
path.push(currentPosition)
elseif not path.empty() then
-- get back one step
currentPosition = path.pop()
else
-- there's no solution
break
end
end
endThis fairly simple algorithm uses the neighbours function to obtain a list of cells that haven't been visited yet:
-- A shorthand for direction coordinates
local neighbourLocations = {
[0] = {0, 1},
[1] = {1, 0},
[2] = {0, -1},
[3] = {-1, 0},
}
local function neighbours(position0, fn)
local neighbours = {}
local currentCell = map[position0]
if type(currentCell)=='table' then
local connections = currentCell.connections
for i=0,3 do
-- is this cell connected?
if bit.band(connections, 2^i) >= 1 then
local neighbourLocation = neighbourLocations[i]
local position1 = {position0[1] + neighbourLocation[1], position0[2] + neighbourLocation[2]}
if (position1[1]>=1 and position1[1] <= maze.width and position1[2]>=1 and position1[2] <= maze.height) then
if type(fn)=="function" then
if fn(map[position1], position1) then
table.insert(neighbours, position1)
end
else
table.insert(neighbours, position1)
end
end
end
end
end
return neighbours
endWhen this algorithm finishes, a valid path between entry and exit points is stored in the path variable represented by the stack data structure. The path variable will contain an empty stack if there's no solution for the maze.
This pathfinding algorithm uses two main steps. First, it looks around the current maze cell to find cells that are connected to the current maze cell with a passage. This will result in a list of possible cells that haven't been visited yet. In this case, the algorithm will always use the first available cell from this list. Each step is recorded in the stack structure, so in the end, you can reconstruct the whole path from the exit point to the entry point. If there are no maze cells to go, it will head back to the previous cell from the stack.
The most important is the neighbours function, which determines where to go from the current point. It uses two input parameters: current position and a cell testing function. It looks around the current cell in four directions in clockwise order: up, right, down, and left. There must be a passage from the current cell to each surrounding cell; otherwise, it'll just skip to the next cell. Another step determines whether the cell is within the rectangular maze region. Finally, the cell is passed into the user-defined testing function, which will determine whether to include the current cell in a list of usable cells.
The maze cell testing function consists of a simple Boolean expression. It returns true if the cell has a correct cell type (not a wall) and hasn't been visited yet. A positive result will lead to inclusion of this cell to a list of usable cells.
Note that even if this pathfinding algorithm finds a path to the exit point, it doesn't guarantee that this path is the shortest possible.