6.4 Synchronization Metrics for TDM and Synchronous Ethernet
A clock based on the physical layer signal is depicted in Figure 6.7. A comparator compares the clock input and clock output. In the case of phase comparator, the output will, in the long run, output the same number of clock cycles as goes in. The clock is thus called a phase-locked loop (PLL). Another method is to compare frequencies of the input and output. Because phase error accumulation is not an issue for base stations, as long as the frequency error remains within 16 ppb, phase lock is not necessary.
Figure 6.7 Function model of a TDM based clock.

As the TDM specifications allow large short-term frequency variations, see Figure 6.9, a low-pass filter is needed to do averaging of the input phase or frequency. The most commonly used reference, 2 Mbit/s traffic signal needs about 1000-s averaging. Thus, the filter time constant should be of the same order of magnitude.
6.4.1 Stability Metric MTIE
Before going into the metric, let's quickly remind ourselves about the relationship between frequency and phase errors. Either or both terms will be used in this chapter depending on the context. Simply, the accumulated phase error over a time period is the average frequency error times the length of the time period. Frequency error is calculated as the difference between the measured and reference frequency, divided by the reference frequency. Since the nominator and denominator both have the unit Hz, the ratio between them has no unit, while the unit of phase error is the second. The acronyms ppm (parts per million) and ppb (parts per billion) are typically used to give the magnitude of the frequency error.
Sometimes it is more natural to use phase and sometimes frequency error even though there is a direct relationship. For example, it is more natural to measure very short-term noise as phase error since the phenomenon is basically the time inaccuracy when a rising or falling edge actually occurs. Long-term variations are more frequency error oriented since an oscillator can tick too fast or too slow for long periods and the accumulated phase error can be up to thousands of clock cycles.
Clock sources have short- and medium-term frequency/phase noise. On the other hand, as telecommunication signal traverses across a network, several mechanisms will cause short- and medium-term fluctuation to the frequency/phase compared to the original signal. As long as the accumulated phase error is not too large, the fluctuations can be tolerated even if it means significantly larger short-term frequency error than allowed in average. Therefore, a metric is needed, for specifying different amounts of fluctuations depending on the observation interval. In telecom, the noise phenomena have been divided into two classes, jitter and wander. Jitter is phase/frequency noise with periodicity below 0.1 s and wander above 0.1 s.
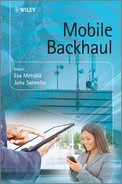
The TDM (time division multiplexing) synchronization metrics are described in ITU-T G.810. The most important metric is MTIE (maximum time interval error), which measures wander. It describes the time drift of a clock, compared with the reference. The x-axis of an MTIE graph is ![]() , observation interval width, measured in seconds. The y-axis
, observation interval width, measured in seconds. The y-axis ![]() is the maximum time drift that has occurred within the observation window. Thus, MTIE is a phase metric and correspondingly the unit is second. For example, for finding out the maximum time drift within a 10-s observation window, the 10-s window is slid over the whole measurement data of, for example 24 hours. The time difference between the maximum and minimum time error within the observation window is recorded at each position the window takes over the 24-hour data. The maximum recorded time difference represents MTIE at that particular value of
is the maximum time drift that has occurred within the observation window. Thus, MTIE is a phase metric and correspondingly the unit is second. For example, for finding out the maximum time drift within a 10-s observation window, the 10-s window is slid over the whole measurement data of, for example 24 hours. The time difference between the maximum and minimum time error within the observation window is recorded at each position the window takes over the 24-hour data. The maximum recorded time difference represents MTIE at that particular value of ![]() (observation interval length). MTIE is estimated from discrete measurement samples as
(observation interval length). MTIE is estimated from discrete measurement samples as
(6.5) ![]()
where ![]() is the observation interval (or window),
is the observation interval (or window), ![]() is the time error,
is the time error, ![]() is the number of samples in the observation interval,
is the number of samples in the observation interval, ![]() is the sampling interval, and
is the sampling interval, and ![]() is the total number of samples in the measurement. Figure 6.8 shows the sliding observation window of length
is the total number of samples in the measurement. Figure 6.8 shows the sliding observation window of length ![]() that is slid over the
that is slid over the ![]() samples of data.
samples of data.
Figure 6.8 The variable ![]() is the peak-to-peak xi within the k-th location of the observation window.
is the peak-to-peak xi within the k-th location of the observation window. ![]() is the maximum
is the maximum ![]() found from the
found from the ![]() locations the observation window takes when it is slid over the data.
locations the observation window takes when it is slid over the data.
As the name indicates, MTIE determines maximum drifts that have occurred during a measurement. Therefore, it is particularly handy for indicating limit values in the form of masks. Figure 6.9 shows a few of the most commonly used masks. Namely, 2.048 Mbit/s traffic mask, 1.544 Mbit/s network mask and SEC (SDH equipment clock) mask. The masks indicate maximum allowed time drifts compared to the reference. When looking carefully at the specifications, the metric for 2.048-Mbit/s wander is actually MRTIE (maximum relative time interval error). However, if the 2.048-Mbit/s signal is synchronized to a PRC instead of being free-run, then MRTIE = MTIE.
Figure 6.9 Wander masks for various TDM signals.

6.4.2 Relationship between TDM Wander Specification and Base Station Clock Accuracy
The wander masks can be compared with the 16-ppb frequency stability requirement of cellular base stations. The wander limits determine the applicability of a TDM signal for base station synchronization. The limits are quite forgiving concerning short-term phase variation. For example, G.823 2M traffic mask allows 40-ppm frequency error at the observation interval of 0.1 s. As the requirement of base station clock is 16 ppb even for short observation windows, 2-Mbit/s traffic interface wander would be three orders of magnitude too high. Since the TDM signals used for base station synchronization are phase-locked to PRC, the long-term average error is as low as 0.01 ppb. Thus, the base station requirement can be satisfied by averaging the reference for a long enough time.
The most commonly used reference is 2.048 Mbit/s PDH traffic signal. The wander is specified in Section 5.2.1 of G.823. From Figure 6.9 one can deduce that by averaging this signal for 1125 seconds, the 16-ppb requirement can be achieved. By being slightly picky, one can see that the G.823 mask, at the level of 18 μs, ends at 1000 s, allowing a long-term drift of 18 ppb. However, phase-locked clocks will not drift very long to the same direction – so 16 ppb can be safely reached by averaging about 1000 s. By using 1.544 Mbit/s signal as a reference one could reach 16-ppb accuracy by averaging 525 seconds. Finally, by using a reference meeting SEC mask, adequate frequency stability could be achieved by averaging a mere 125 s.
6.4.3 TDEV
TDEV (Time Deviation) is another metric used in telecom. It describes time stability of a clock as a function of averaging time. The metric has been derived from Modified Allan Deviation (MDEV), which in turn describes frequency stability of a clock as a function of averaging time. MDEV is used, for example, to compare primary frequency references against each other. TDEV incorporates sliding windows similar to MTIE, and TDEV curve is also drawn as a function of the window width. However, instead of seeking maximum within the window, TDEV measures differences between three consecutive sliding averaging windows. The estimator formula is

where ![]() is the averaging window size,
is the averaging window size, ![]() is the time error,
is the time error, ![]() is the number of samples in the averaging window interval,
is the number of samples in the averaging window interval, ![]() is the sampling interval, and
is the sampling interval, and ![]() is the total number of samples in the measurement. Figure 6.10 shows the sliding observation windows of length
is the total number of samples in the measurement. Figure 6.10 shows the sliding observation windows of length ![]() that are slid over the
that are slid over the ![]() samples of data. There are two averaging processes. First, the contents of each time window indicated by the grey columns are averaged. This occurs inside the square brackets in the formula. Second, the outer sum averages the squared difference calculations as the averaging windows slide across the data.
samples of data. There are two averaging processes. First, the contents of each time window indicated by the grey columns are averaged. This occurs inside the square brackets in the formula. Second, the outer sum averages the squared difference calculations as the averaging windows slide across the data.
(6.7) ![]()
where ![]() ,
, ![]() , and
, and ![]() represent the left, middle, and right window, respectively, one can see that the metric detects how the time difference between consecutive averaging windows vary. This corresponds to measuring how much the frequency error changes over the time
represent the left, middle, and right window, respectively, one can see that the metric detects how the time difference between consecutive averaging windows vary. This corresponds to measuring how much the frequency error changes over the time ![]() . Thus, a clock, with a constant frequency error will yield TDEV = 0. On the other hand, a clock with high frequency/phase noise will yield a high TDEV. The relationship between TDEV and MDEV is simple:
. Thus, a clock, with a constant frequency error will yield TDEV = 0. On the other hand, a clock with high frequency/phase noise will yield a high TDEV. The relationship between TDEV and MDEV is simple:
Figure 6.11 depicts TDEV of the clock time error shown in Figure 6.10. One can see how the phase noise level varies as a function of sliding window size. The curve shows that at time intervals below 10 s the average noise level is 0.2 ns. At larger time intervals the average noise level increases up to about 100 ns. When comparing this value to time error variation in Figure 6.10, one can see that some time error changes in Figure 6.10 at corresponding time scales are up to ten times larger than indicated by TDEV. This is due to the averaging property of TDEV.
Figure 6.10 Description of the principle of TDEV function.

Figure 6.11 TDEV curve of a clock.
