Chapter 3
Basics of Forward Problem
To solve an inverse problem, we need to establish a mathematical model of the underlying physical phenomena as a forward problem. Correct formulation of the forward problem is essential to obtain a meaningful solution of the associated inverse problem. Since the partial differential equation (PDE) is a suitable mathematical tool to describe most physical phenomena, we will study the different kinds of PDEs commonly used in physical science.
When we set up a forward problem associated with an inverse problem, we should take account of the well-posedness (Hadamard 1902) as described in Chapter 1. In constructing a mathematical model that transforms physical phenomena into a collection of mathematical expressions and data, we should consider the following three properties.
- Existence: at least one solution exists. For example, the problem u′′(x) = 1 in [0, 1] has at least one possible solution, u = x2/2, whereas the problem |u′′(x)|2 = − 1 has no solution.
- Uniqueness: only one solution exists. For example, the boundary value problem

has the unique solution u(x) = ex, whereas the boundary value problem

has infinitely many solutions, u(x) = x, x2, x3, ….
- Continuity or stability: a solution depends continuously on the data.
A problem without the above three properties is ill-posed. To formulate a manageable problem dealing with key information, we often go through a simplification process and sacrifice some physical details. There also exist uncertainties in physical conditions and material characterizations. We should, therefore, take account of the well-posedness of the forward problem when we formulate it to seek a solution of a related inverse problem.
3.1 Understanding a PDE using Images as Examples
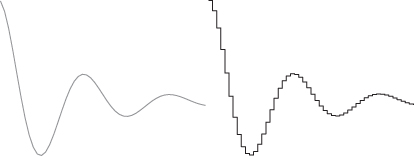
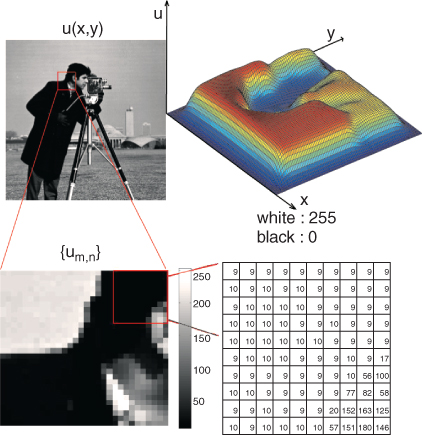
Understanding a PDE and its solution is often hindered by its mathematical expression. Before we deal with it mathematically, we provide an intuitive understanding of basic PDEs through examples of digital images with concrete pictures. A continuous signal will be represented as a function of one variable u(x) or u(t), and the corresponding sampled signal will be written as a sequence {un} as shown in Figure 3.1. A continuous image will be represented as a function u(r) of two variables r = (x, y), and the corresponding digital image will be written as a sequence {um, n} as shown in Figure 3.2. The partial derivatives ∂u/∂x, ∂u/∂y and the Laplacian ∇2u = ∂2u/∂x2 + ∂2u/∂y2 will be understood in the following discrete sense:
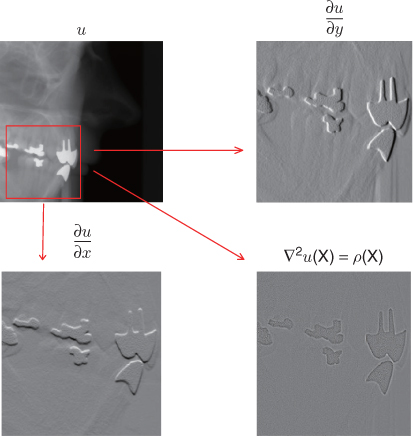
Example 3.1.1 (Poisson's equation)
In Figure 3.3, the image at the top left is represented as u. We can view the image u as a solution of Poisson's equation

where Ω = {
r = (
x,
y):0 <
x,
y <
L}
is the image domain, ρ is its Laplacian at the bottom right in Figure 3.3 and f is the boundary intensity of u.
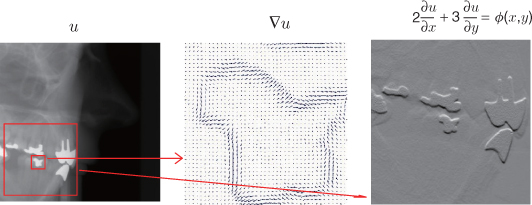
Example 3.1.2 (Wave equation)
In Figure 3.4, we represent the image u as a solution of the wave equation

with the initial condition u(
x, 0) =
f1(
x),
u(0,
y) =
f2(
y)
for 0 <
x,
y <
L.
Here, ϕ is plotted on the right-hand side of Figure 3.4 and the initial data are the boundary intensity of the image u on the left.
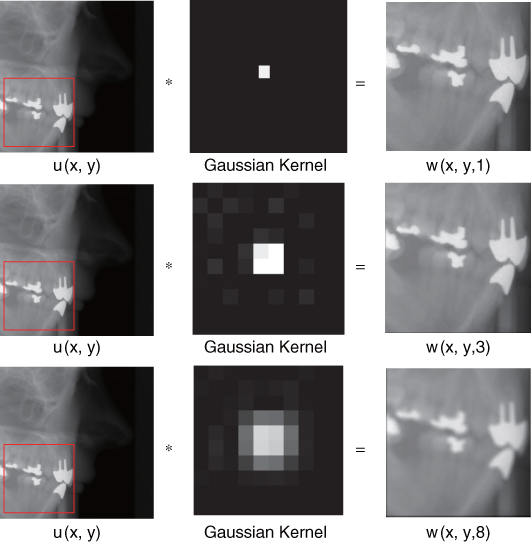
Example 3.1.3 (Heat equation)
We define
3.1 
Then, w(r, t) satisfies the heat equation

with the initial condition

Figure 3.5 shows the images of u, the Gaussian kernel and w.
3.2 Heat Equation
We first introduce the heat equation used to describe a heat conduction process within an object.
3.2.1 Formulation of Heat Equation
Suppose u(r, t) measures the temperature at time t and position r = (x, y, z) ∈ Ω in a three-dimensional domain  . According to Fourier's law, the heat flow, denoted by J = (Jx, Jy, Jz), satisfies
. According to Fourier's law, the heat flow, denoted by J = (Jx, Jy, Jz), satisfies

where k is the thermal conductivity. The temperature u is dictated by the law of conservation of energy. For an arbitrarily small volume D ⊂ Ω with its surface area ∂D, heat energy can escape from D only through its surface.
The change in the total amount of heat per unit time in D can be expressed as

where ρ is the density and c is the specific heat of the object, representing the amount of heat required to raise the temperature of one unit mass by one degree. The amount of heat per unit time flowing into D can be expressed by using the divergence theorem as

where n is the unit outward normal vector to ∂D. If f(r, t) represents the instantaneous volumetric rate of heat generation at r ∈ D, the total amount of heat produced in D per unit time is

From the law of conservation of energy, we set

Since D is arbitrary, u satisfies
3.2 
If ρ and c are constants, (3.2) becomes
3.3 
where κ = k/ρc and  .
.
3.2.2 One-Dimensional Heat Equation
To understand the behavior of the temperature u, we consider the one-dimensional heat equation
3.4 
where k is a positive constant.
Theorem 3.2.1
For  , we define
, we define
3.5 
where K is the one-dimensional heat kernel set by
3.6 
Then, u satisfies the heat equation with the initial condition ϕ:
3.7 
Proof.
A direct computation gives

Hence, for t > 0, we have

It remains to prove the initial condition

This comes from the fact that

The above approximation holds since

and

This completes the proof.
Theorem 3.2.2 Maximum principle
If a non-constant function u(x, t) satisfies
3.8 
then u(x, t) cannot attain its maximum anywhere in the rectangle (0, L) × (0, T]. In other words, u attains its maximum on the bottom [0, L] × {t = 0} or the lateral side {0, L} × [0, T].
Proof.
For

> 0,
v(
x,
t): =
u(
x,
t) +
x2 satisfies

If
v attains its maximum inside the rectangle (0,
L) × (0,
T], there exists (
x0,
t0) ∈ (0,
L) × (0,
T] at which
u attains its maximum, but

which is not possible. Since lim
→0v =
u,
u also cannot attain its maximum anywhere inside the rectangle (0,
L) × (0,
T].
Theorem 3.2.3 Uniqueness
There is at most one solution of
3.9 
where f, ϕ, g and h are smooth functions. If u1 and u2 are two solutions of the above problem, then u1 = u2.
Proof.
The difference w = u1 − u2 satisfies
3.10 
By the maximum principle, w = 0
3.2.3 Two-Dimensional Heat Equation and Isotropic Diffusion
We consider the heat equation in two dimensions with r = (x, y).
Theorem 3.2.4
Let  . If u
. If u(
r,
t)
is a solution of the two-dimensional heat equation
3.11 
then u can be expressed as
3.12 
where  is the heat kernel in two dimensions.
is the heat kernel in two dimensions.
Proof.
The proof is exactly the same as that for the one-dimensional case. Indeed, the proof comes from the following facts:

and

Exercise 3.2.5
Let Ω be a bounded smooth domain in  . Assume that u
. Assume that u(
r,
t)
is a solution of the two-dimensional heat equation
3.13 
1. State and prove the maximum principle for u(r, t) as in Theorem 3.2.2.
2. State and prove the uniqueness theorem for u(r, t) as in Theorem 3.2.3.
Remark 3.2.6
Uses of PDEs are not limited to describing physical phenomena. In addition to describing a physical heat conduction process, the two-dimensional heat equation has an interesting application of denoising image data. With t = σ
2/2,
we can express (3.12) as a convolution form:
3.14 
where Gσ is the Gaussian filter defined by
3.15 
When ϕ in (3.14) is an observed image containing noise, we can view Gσ * ϕ
as a denoised image. For a small σ,
Gσ * ϕ ≈ ϕ
and, therefore, details in the image are kept. A larger σ results in a blurred image Gσ * ϕ
with reduced noise. Hence, σ determines the local scale of the Gaussian filter that reduces noise while eliminating details of the image ϕ.
3.2.4 Boundary Conditions
We assume a three-dimensional domain Ω occupying a solid object where heat conduction occurs. If there is no heat source inside Ω, then the temperature u(r, t) at time t and position r = (x, y, z) satisfies the heat equation:

This PDE tells us the physical law of the rate of change of the temperature inside Ω. To predict future temperature, we need some additional information. Indeed, we need to know the initial temperature distribution

and some boundary conditions, which usually will be one of the following:

Here, H is called the heat transfer coefficient. Case 1 is called the Dirichlet boundary condition, case 2 is the Neumann boundary condition and case 3 is the Robin boundary condition.
Now suppose that the boundary condition is independent of time (steady boundary condition in cases 1 and 2). Then, as t → ∞, the temperature u(r, t) converges to a function v(r), independent of time, which is called the equilibrium temperature. Then, v satisfies the equation

For the case of constant k, the above equation becomes the Laplace equation,

3.3 Wave Equation
A wave is a spatial disturbance of a medium that propagates at a wave speed depending on the substance of the medium. The wave equation describes wave propagation in the medium. We begin with the following linear wave equation:
3.16 
We can first understand the structure of its general solution by simple examples.
Example 3.3.1
When a = 1,
b = 0 =
c,
(3.16 becomes ∂u/∂x = 0, which means that u does not depend on x. Hence, the general solution is

For example, u = y2 − 5y and u = ey could be solutions of ∂u/∂x = 0.
Example 3.3.2
When a and b are constant and c = 0,
(3.16) becomes aux + buy = 0 or (a, b) · ∇u = 0, which means that u does not change in the direction (a, b). Hence, u is constant in the direction (a, b), that is, u is constant on any line bx − ay = constant, called the characteristic line. We should note that the characteristic line bx − ay = constant satisfies dy/dx = b/a. Hence, the general solution is

Example 3.3.3
Consider 2ux + yuy = 0 or (2, y) · ∇u = 0. Then, u is constant on any characteristic curve satisfying dy/dx = y/2. This means that u = constant for any characteristic curve y e−x/2 = C that is a solution of dy/dx = y/2. Hence, the general solution is

Example 3.3.4
Consider 2ux + 4xy2uy = 0. Then u is constant along the characteristic curves satisfying
Since the characteristic curves are y = (C − x2)−1 or x2 + 1/y = C, the general solution is

Now, we will derive a wave equation from Hooke's law and Newton's second law of motion by considering a flexible, elastic homogeneous string that is stretched between two points x = 0 and x = L. Assume that the string undergoes relatively small transverse vibrations and its displacement u(x, t) at time t and position x is perpendicular to the direction of wave propagation. Assume that the string is released from the initial configuration described by the curve y = f(x), 0 ≤ x ≤ L, and that it is at rest when released from this configuration. We also assume that the tension T and the density ρ are constants over the length of the string.
We apply Newton's law to the part of the string over the interval [x, x + Δx]. The vertical component of the force acting on the string at [x, x + Δx] is
Since force = mass × acceleration =  over the interval [x, x + Δx], we obtain
over the interval [x, x + Δx], we obtain

Letting Δx → 0, we have ρutt − Tuxx = 0. The displacement function u(x, t) must also satisfy the initial conditions u(x, 0) = f(x), ut(x, 0) = 0 and the boundary conditions u(0, t) = u(L, t) = 0. Hence, the displacement u(x, t) satisfies the following PDE approximately:

Theorem 3.3.5
The general solution of the wave equation
3.17 
is
3.18 
where f and g are two arbitrary functions of a single variable.
Proof.
We can decompose the wave operator into

Writing

v satisfies

The general solution of v is

for an arbitrary differentiable function h. Then, u satisfies
3.19 
where
h is an arbitrary function of the single variable. We can express the general solution of (
3.19) as
3.20 
where
g(
x −
ct) is the general solution of
ut +
cux = 0. Now, it remains to determine the particular solution of (
3.19). Substituting
f(
x +
ct) into (
3.19) yields
3.21 
Hence, f satisfying 2cf′ = h is a particular solution. This completes the proof.
We may adopt a different method of using the characteristic coordinates to prove (3.18). Taking account of

we introduce the characteristic coordinates

With these new coordinates, (3.17) leads to
The above identity comes from the change of variables:

Therefore, the solution of this transformed equation is

Theorem 3.3.6
For a given initial displacement  and initial velocity
and initial velocity  , the solution of the initial value problem
, the solution of the initial value problem
3.22 
can be expressed as
3.23 
Proof.
Since the general solution is u(x, t) = f(x + ct) + g(x − ct), we need to determine f and g using the two initial conditions:

Hence, f and g must satisfy

which lead to
where C1 and C2 are constants. Since u(x, 0) = f(x) + g(x) = ϕ(x) + C1 + C2, we have C1 + C2 = 0. This completes the proof.
The formula (3.23) clearly explains the effects of an initial position ϕ and an initial velocity ψ that determine how a wave spreads out with speed c in both directions.
Example 3.3.7 (Euler's equation)
Consider the flow of fluid with pressure p(x, t), density ρ(x, t) and the velocity of a particle of fluid v(x, t). Let Ω be a volume element with boundary ∂Ω and let n(x) with x ∈ ∂Ω be the the unit outward normal vector. The conservation of mass in a unit time interval is expressed by the relation

From the divergence theorem

we get

which leads to the continuity equation
The total force on Ω is the sum of the forces exerted across the surface ∂Ω, which is given by F = − ∫∂Ωp(x, t)n(x) dSx. The gravitational force on Ω is ∫Ωρg dx. Newton's law gives

It follows from the divergence theorem that − ∫∂Ωp(x, t)n(x) dSx = − ∫Ω∇p(r, t) dV. Hence,

which leads to

The time derivative of the fluid velocity v(x, t) is the material derivative defined as

If we denote by x(t) the path followed by a fluid particle, then the velocity is v(x(t), t) = x′(t) and acceleration a satisfies

Hence, Euler's equation of motion can be expressed as

3.4 Laplace and Poisson Equations
There are many physical boundary value problems expressed as Laplace or Poisson equations. After introducing the equations, we provide several examples to obtain some insights into their solutions. Then, we will describe the potential technique to find the solutions.
3.4.1 Boundary Value Problem
Let Ω with a smooth connected boundary ∂Ω be a domain in three-dimensional space  . The Laplace equation of a scalar variable u is
. The Laplace equation of a scalar variable u is
3.24 
To determine its solution uniquely, we need to impose a boundary condition. There are three types of boundary conditions, and we need to specify one boundary condition for every point on the boundary ∂Ω.
1. Dirichlet boundary condition: u|∂Ω = f on the boundary ∂Ω.
2. Neumann boundary condition: ∇u · n|∂Ω = g on the boundary ∂Ω.
3. Mixed boundary condition: for two non-overlapping parts Γ
D and Γ
N with

,

When an internal source exists in Ω, we use the Poisson equation, which is the inhomogeneous form of the Laplace equation:
3.25 
where ρ represents the source term in Ω. The Poisson equation also requires proper boundary conditions.
For a given  and h ∈ C(∂Ω), consider the following Poisson equation with a Dirichlet boundary condition:
and h ∈ C(∂Ω), consider the following Poisson equation with a Dirichlet boundary condition:
3.26 
By the principle of superposition, we can decompose its solution u as

where v and h satisfy

Example 3.4.1
We consider a one-dimensional special case where ρ = 1,
that is,
u′′(
x) = 1
in the interval (0, 1)
and u(0) =
u(1) = 0.
The solution is 
.
Example 3.4.2
We consider a two-dimensional special case of ∇
2u = 1
with u|
∂Ω = 0,
where the domain Ω is the unit disk centered at the origin. The solution is  .
.
Example 3.4.3
We consider a two-dimensional Laplace equation in the rectangle Ω = (0, π) × (0, π). The solution of
3.27 
can be expressed as
3.28 
Here, we use separable variables and Fourier analysis. In short, if

then V must be contained in the vector space

Hence,  form a basis of the solution space.
form a basis of the solution space.
3.4.2 Laplace Equation in a Circle
We derive an explicit representation formula for solutions of the Laplace equation in a circle. We will investigate the mean value property, which is the most important property of solutions of the Laplace equation.
Theorem 3.4.4
Let Ω = B1(0), the unit disk centered at the origin. Suppose u is a solution of the Laplace equation with a Dirichlet boundary condition:

where  and
and θ = tan
−1(
y/
x).
We can express u as

Proof.
For convenience, we denote

. Then,

satisfies

with

Polar separation of variables is based on the assumption that the solution takes the form

, which must satisfy

This comes from the use of ∇2(vw) = 0, which is equivalent to

Hence, the PDE splits into the following pair of ordinary differential equations (ODEs):

The eigenvalue problem

has the following non-zero eigenfunctions:

For each eigenvalue λ = n2, the corresponding eigenfunction v must lie in the set

which leads to

Hence, all possible polar separable solutions are

Now, we are ready to show that

can be expressed as a linear combination of polar separable solutions:

Since this expression for

satisfies all conditions except

, it suffices to show that
f can be expressed as a Fourier series. According to Fourier analysis,
f can be expressed as

where

Hence, the solution

can be expressed as

Denoting

, we have

and

Theorem 3.4.5 (Mean value property and maximum principle)
Assume that ∇
2u(
r) = 0
in Ω.
Here,
r = (
x,
y).
If  , then u
, then u(
r0)
is the average of u over the circle  :
:

Moreover, u cannot have a strict local maximum or minimum at any interior point of Ω.
Proof.
Writing

and using Theorem 3.4.4, we have

The above identity directly yields
3.29 
which means that
u(
r0) is the average of
u over the circle

.
Now, we prove the maximum principle using the mean value property. To derive a contradiction, suppose
u has a strict local maximum at
r0 ∈ Ω. Then there exists
s > 0 such that
u(
r0) >
u(
r) for
r ∈ ∂
Bs(
r0), where
s is sufficiently small to be
B(
r0) ⊂ Ω. Then, we have

which contradicts (
3.29).
Theorem 3.4.6 (Uniqueness of Dirichlet problem)
Suppose that  satisfy
satisfy

Then u = v in Ω.
Proof.
Denoting w = u − v, w satisfies

From the maximum principle, w cannot have a strict maximum or minimum inside Ω. Since w|∂Ω = 0, w = 0 in Ω.
3.4.3 Laplace Equation in Three-Dimensional Domain
Let Ω be a smooth domain in  with a connected boundary ∂Ω. The Green's function G(r, r′) is a unique solution to the following Poisson equation: for each r′ = (x′, y′, z′) ∈ Ω,
with a connected boundary ∂Ω. The Green's function G(r, r′) is a unique solution to the following Poisson equation: for each r′ = (x′, y′, z′) ∈ Ω,
3.30 
Theorem 3.4.7
The function 1/(4π|r|) satisfies the following properties:
3.31 
3.32 
Proof.
Let

. Straightforward computation gives
3.33 
Hence, for an arbitrary ball B containing r, we have
3.34 
This leads to

The last term can be decomposed into
Since |ρ(r′) − ρ(r)| = O(|r′ − r|), it is easy to show that

and

Hence, it suffices to prove
3.35 
The above identity can be shown using a careful use of the divergence theorem:
where Br(r) is the ball with center r and radius r. Here, we use the fact that, for r ∈ B,

This completes the proof.
Example 3.4.8
Coulomb's law states that there exists a force between two charged particles, which is proportional to the product of the charges and inversely proportional to the square of the distance between them. Considering a space with charged particles, there exists an electric field with its intensity denoted by E. We define E(r) as the force that a stationary unit test charge at r will experience. The electric field intensity from a point charge q, located at r0 in an unbounded free space, can be expressed as
3.36 
where 0 = 8.85 × 10
−12 is the permittivity of free space. In general, we can express E subject to a certain charge distribution ρ(
x)
in Ω as

According to Theorem 3.4.7,
E in (3.36) can be expressed as
3.37 
Here, u is the electric potential and it satisfies the Poisson equation:
3.38 
Theorem 3.4.9 (Two-dimensional version of Theorem 3.4.7)
In two dimensions, the Green's function for the entire space  is
is [ − 1/(2π)]ln|
x −
y|,
where x = (
x1,
x2)
and y = (
y1,
y2).
Let Ω be a two-dimensional domain in  . For
. For  , we have
, we have
3.39 
Proof.
The proof is exactly the same as that of Theorem 3.4.7 with minor modifications. Let x ∈ Ω be fixed. Straightforward computations give
3.40 
3.41 
Here,
B is a disk. The identity in (
3.40) gives

Since the above identity is true for arbitrarily small
r > 0, we may understand the left-hand side in (
3.39) as
3.42 
Hence, (
3.39) can be proven by showing that
3.43 
which is equivalent to
3.44 
With
> 0, we can move ∇
2 inside the integral (via the Lebesgue dominated convergence theorem):

Using Green's theorem and (
3.40) and (
3.41),
This completes the proof of (
3.44).
Using Theorem 3.4.7, we now express the Green's function of the Poisson equation with zero Dirichlet boundary condition in a domain Ω.
Definition 3.4.10
Let Ω be a smooth domain in  . The Green's function of the Laplace equation for the domain Ω is
. The Green's function of the Laplace equation for the domain Ω is
3.45 
where H(r, r′) satisfies the following: for each r′ ∈ Ω,
3.46 
According to Theorem 3.4.7 and (3.46), the Green's function satisfies the following in the sense of distribution:
3.47 
Exercise 3.4.11
When  , H = 0 and the Green's function
, H = 0 and the Green's function
can be viewed as a potential subject to a unit positive source located at r′.
We can obtain the Green's function for the three-dimensional space  using the symmetry of v
using the symmetry of v(
r): =
G(
r, 0),
which depends only on the distance  from the origin. Prove the following:
from the origin. Prove the following:
1. v satisfies

2. setting v(
r) =
v(
x,
y)
with  , solve
, solve

3. the general solution is
4. C1 = 1/(4π) and C2 = 0.
Theorem 3.4.12
We can express the solution of the Poisson equation
3.48 
as
3.49 
Proof.
The property of the Green's function in (
3.47) directly gives the proof.
Example 3.4.13 (Green's function in half-space)
Let Ω: = {r = (x, y, z):z > 0} be the upper half-space. To find a Green's function, we need to find the function H(r, r′) such that, for each r′ ∈ Ω,

exactly matches the boundary value

and for each r′ ∈ Ω,

Hence, the Green's function of the half-space is given by

Example 3.4.14 (Green's function in a ball)
Let Ω = {
r = (
x,
y,
z):|
r| < 1}
be the unit ball in  . To find a Green's function in the ball, we need to find the harmonic function H
. To find a Green's function in the ball, we need to find the harmonic function H(
r,
r′)
of r such that, for each r′ ∈ Ω,
In this case, the image point  with respect to the unit sphere ∂Ω is given by
with respect to the unit sphere ∂Ω is given by

As a result,

has the same boundary condition on the unit sphere as 1/(4π|r − r′|), that is,

Hence, the Green's function for the unit ball is

In the case of a solid ball with radius s, we choose the image point given by

Then, the Green's function for the solid ball with the radius s is
3.50 
Lemma 3.4.15
If G is a Green's function for the domain Ω, then it is symmetric:
3.51 
where x = (x1, x2, x3) and y = (y1, y2, y3).
Proof.
Integrating by parts gives
Exercise 3.4.16
Find Green's functions of the following domains Ω in  :
:
1. 
;
2. Ω = upper half-plane;
3. Ω = unit disk;
4. 
,
disk with radius 3.
3.4.4 Representation Formula for Poisson Equation
Using the Green's function, we can find a simple representation formula for the solution of the following Poisson equation:
3.52 
Theorem 3.4.17
For f ∈
C(∂Ω),
the solution of the Poisson equation (3.52) is expressed as
3.53 
where the Poisson kernel K(r, r,) is

Proof.
For a fixed r ∈ Ω, integration by parts gives
Exercise 3.4.18
Assume  is a solution of (3.52). As in Theorem 3.4.24 for the two-dimensional case, the potential u minimizes the energy functional Φ(u) within the class
is a solution of (3.52). As in Theorem 3.4.24 for the two-dimensional case, the potential u minimizes the energy functional Φ(u) within the class  , where the energy functional is defined by
, where the energy functional is defined by

The procedure of the proof is as follows.
Theorem 3.4.19 (Mean value property and maximum principle)
Assume that  satisfies
satisfies ∇
2u(
r) = 0
in Ω.
For each r* ∈ Ω,
u(
r*)
is the average of u over its neighboring sphere centered at r*:
3.54 
Moreover, u cannot have a strict local maximum or minimum at any interior point of Ω. In other words,
3.55 
Proof.
Assume Bs(r*) ⊂ Ω. If K(r, r′) is the Poisson kernel for the ball Bs(r*), a straightforward computation gives

Then, the mean value property in (
3.54) follows from the representation formula (
3.53) with ρ = 0 and the above identity. Moreover, the mean value property (
3.54) gives the maximum principle (
3.55).
Theorem 3.4.21
Denote Bs = {|
r| <
s}.
If u ∈
C2(
 s
s)
satisfies − ∇
2u = ρ
in Bs, then
3.57 
where

In particular,
3.58 
Proof.
The identity follows from the representation formula (
3.53), the mean value theorem (
3.54) and the Green's function on the ball (
3.50).
Theorem 3.4.22 (Hopf's lemma)
Let r* ∈ ∂
Bs.
If u ∈
C2(
s(0))
satisfies
3.59 
then
3.60 
Proof.
Define

Note that

and

Using the above identity and

, we can choose a sufficiently small
> 0 and large α such that

Since

u +
vα cannot have a local maximum in

and therefore
u +
vα has a maximum at
r*. Hence,
or

Theorem 3.4.23 (Strong maximum principle)
Assume that  satisfies
satisfies ∇
2u(
r) = 0
in Ω.
If u attains its maximum at r* ∈ ∂Ω,
then
3.61 
If u is not constant, then
3.62 
Proof.
A careful use of Hopf's lemma gives the proof.
We can view a solution of the Poisson equation as an energy minimizer subject to some constraints.
Theorem 3.4.24
Let  and h
and h ∈
C(∂Ω).
Suppose that  is the solution of
is the solution of
3.63 
Then, u is characterized as the unique solution that minimizes the Dirichlet functional
3.64 
within the set  .
.
Proof.
Suppose

. Since Φ(
w) ≤ Φ(
w +
tϕ) for any

and any

,

Integration by parts yields

which leads to ∇2w + ρ = 0 in Ω. Then, it follows from Theorem 3.4.21 that w = u in Ω.
References
Hadamard J 1902 Sur les problèmes aux dérivées partielles et leur signification physique. Bull. Univ. Princeton, 13, 49–52.
Further Reading
Evans LC 2010 Partial Differential Equations. Graduate Studies in Mathematics, no. 19. American Mathematical Society, Providence, RI.
Gilbarg D and Trudinger N 2001 Elliptic Partial Differential Equations of Second Order. Springer, Berlin.
John F 1982 Partial Differential Equations. Applied Mathematical Sciences, vol. 1. Springer, New York.
Lieb EH and Loss M 2001 Analysis, 2nd edn. Graduate Studies in Mathematics, no. 14. American Mathematical Society, Providence, RI.
Marsden JE 1974 Elementary Classical Analysis. W. H. Freeman, San Francisco.
Strauss W A 1992 Partial Differential Equations, An Introduction. John Wiley & Sons, Inc., New York.