
4
Semiotic Systems and Models
4.1. Introduction
In the two previous chapters (Chapters 2 and 3), we considered technological systems and knowledge systems as two particular kinds of systems belonging to the general systems gender, as well as their specific properties. In this chapter, we are going to consider a third kind of systems: systems of signs that connect systems of the second kind to systems of the first kind. We will begin by defining what we mean by a system of signs, or (it is the same) a semiotic system, and we will introduce the denotation relationship that connects concrete systems and designation relationships that connect concrete systems to abstract systems. We will also introduce the concepts of signification and truth of systems of signs, inherited from that of meaning and truth of knowledge systems. We will then present what we mean by a law statement such as a system of signs, on the one hand, in relation with a nomological proposition of a knowledge system and, on the other hand, in relation with a factual law of concrete systems. Once we have presented these concepts, we will define what is meant by a model of a type of systems, using the concept of injective morphism. We will classify two types of models [BUN 73], object models and theoretical models, by specifying the type of morphism to which each refers. We will show how theoretical models pave the way to simulation, and we will conclude on the concepts of representativeness of models and expressiveness of languages.
4.2. Signs and systems of signs
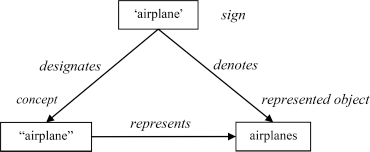
First, a sign is a concrete object (drops of ink, a sequence of sounds, etc.) that allows a social group to denote another concrete object such as the word “airplane” which denotes any real airplane. It also helps designate the concept of “airplane” which is an abstract object. The concept of “airplane” can also represent real airplanes during cognitive activity.
Figure 4.1. Sign, concept and represented object
Next, all signs do not necessarily denote real objects. Some denote nothing from the real world whereas they designate, in the same time, concepts. This is the case for the sign “π”, for example, which designates a particular real number or even the word “unicorn” which does not denote anything real while it designates a poetic fiction. In other words, a system of signs is an abstract system that represents concrete systems or not. No concrete system is represented in the case for logical and basic mathematical theories.
If we take the sign “airplane”, we can consider it to be a system of signs: its composition, the letters “a”, “e”, “i”, “l”, “n”, “p” and “r” arranged into a certain order with repetitions. This order “y follows x” makes up the endostructure of this system of signs. This system also has an environment of abstract objects such as the concept “airplane” it designates. The designation relationship belongs to the exo-structure of this system. This sign “airplane” has an emergent property, namely that of “having a signification”, since its components do not have one. This signification is taken from the meaning of the concept to which it designates, i.e. the concept of an “airplane”. The signification of a sign corresponds to the meaning of the designated concept. Generally speaking, the signification is a property of a system of signs inherited from the meaning of abstract systems they designate. Two signs have the same signification when they designate the same concept. This is why the sign avion in French has the same signification as the sign “airplane”, or even the sign “plane” in English. These are synonyms.
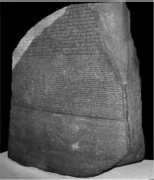
Similarly, in the case of the Rosetta stone, the inscription includes a decree issued in Memphis in 196 BC on behalf of Pharaoh Ptolemy V. The decree affirms the royal cult of the new monarch. It is written in two languages (ancient Egyptian and ancient Greek) and three scripts: Egyptian in hieroglyphics, Egyptian in the Demotic script and the Greek alphabet.
The semiotic system, designating this decree, written using hieroglyphics (composition, endo and exo-structures), was successfully decoded by Champollion due to the coexistence of the other two semiotic systems, Greek and Demotic, which designate the same abstract system (namely, the proclamation of Ptolemy V as a god). The common signification between the systems of signs (Greek, Demotic and hieroglyphics) is inherited from the meaning of the designated abstract system, namely the proclamation of priests in Memphis.
Figure 4.2. Rosetta stone, signification and meaning
If we now consider the system of letters “arilpane”, in English, this sign does not designate any concept and does not denote any kind of concrete objects; in other words, it does not mean anything and does not correspond to any correct construction. This is not a sign; it is morphologically incorrect and semantically lacks signification. However, it shows some similarity with the sign “airplane”, useful for orthographic correctors.
This is also the case for the Voynish manuscript. This is an illustrated book, written between 1408 and 1436, by an unknown author using an unknown alphabet. The nature of this unintelligible manuscript is still an enigma, whether a text for insiders or a joke; we can note that in the current state of things, it does not designate anything (it has no signification) and no longer denotes anything (it no longer has a reference).
Note that systems of signs may be put together to, in turn, form a semiotic system of a higher level; this is the case for sentences. Sentences are syntactically correct systems (endostructure) of words, which designate abstract propositions and possibly denote facts (when the abstract propositions represent facts).
Figure 4.3. Page extracted from Voynish manuscript
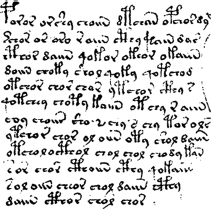
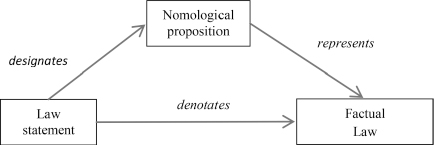
Figure 4.4. Sentence, proposition and fact
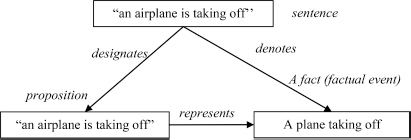
At this level, we can say that, on the one hand, sentences have taken signification from the meaning of propositions they designate, and on the other hand, they have an emergent property with regard to the previous level: they can have a truth value. A sentence is true if the proposition designated is true. Here, again, the endo-structure relates the morphology (here, syntax of the sentence), whereas its exo-structure relates the semantics.
Natural languages (written or spoken) are not the only type of semiotic systems that exist. We must also consider not only artificial languages, such as the language of mathematics, but also a plethora of systems of signs such as sheet music, as well as architectural designs, all imaginable types of mechanical, electrical, electronic, chemical and biological schematics, all imaginable types of diagrams, maps, chronographs and general physical or symbolic models.
Physical models, such as a scaled-down mock-up of an airplane inside a wind tunnel or an oil tanker inside a test basin, are also systems of signs, even if they are figurative objects. Note that there is also a gradation of semiotic systems from figurative (the shape of the signs has similarities with the shape of the represented object) to symbolic (with symbols, the shape of the sign no longer has any similarities with the represented object1) by passing through all the intermediate forms.
Figure 4.5. Signs and symbols

Therefore, a scaled-down model of an airplane at the counter of a travel agency is a figurative sign. Conversely, a cheque, its equivalent in paper money, coins, or its record in a ledger, and a bill of exchange are many symbols designating the same general right to acquire goods or services in an abstract system of monetary exchanges.
4.3. Nomological propositions and law statements
A nomological proposition (this concept was introduced in Chapter 3) is an abstract system, i.e. a fiction resulting from the abstraction of an individual’s own cognitive processes. It is only accessible to other individuals and sharable among individuals by means of systems of signs, which we call law statements such as:
![]()
In this statement, the first term, L(x1, ..,, xn, c1, ..cp), may be a mathematical formula linking together variables and constants, whereas the second term, {SAi(xi), SAj(cj)}, is made up of the semantic assumptions associated with this formula.
Figure 4.6. Law statement, nomological proposition and factual law
A formula, such as F = 1/ 2ρv2SC , which links the signs F, V, S, C and ρ, has a signification and can be understood by anyone, when two conditions are fulfilled: (1) the formula is syntactically correct and (2) the signs F, V, S, C and ρ are signs designating concepts in the considered context. This association between signs in the formula and concepts of a domain, by means of semantic assumptions, completes the law statement. If F, V, S, C and ρ designate the concepts of lift force, velocity of the wing with regard to the surrounding fluid, characteristic wing area, etc., then this law statement (formula + semantic assumptions) designates a nomological proposition known as the lift law. The law statement, therefore, takes its signification from the meaning that the associated nomological statement bears.
Note that by changing the semantic assumptions associated with the same formula, we change the signification of this statement. In fact, if the signs F and C no longer designate the lift force, but instead the drag force, and so on, the statement changes its signification and designates the drag law instead of the lift law.
Moreover, since a nomological proposition does not accurately represent a factual law (this is only, at best, an approximately true representation), this is the same for the law statements that designate nomological propositions and denote factual laws. Thus, the van der Waals law statement is only approximately true. Similarly, the ideal gas law statement is also only approximately true. However, the truth value of the van der Waals law statement is greater than the truth of ideal gas law statement (the factual truth is not binary and comes in degrees).
4.4. Models, object models, theoretical models and simulation
We name model of an object type, a concrete object, from which we can, for example:
These operations are made possible due to a similarity between these systems (sharing the same type) and the model. We say that the model denotes this collection of systems or even that the model is a system representing the collection of represented systems sharing the same type.
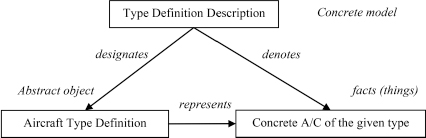
Thus, the type definition description (TDD) is a model (concrete) of an aircraft type that designates an abstraction: the type definition (TD). The TD represents the collection of all produced aircraft2 according to this definition.
Figure 4.7. Systems and models
We name object model a particular type of model that establishes a mapping between the components, environment and structure of the model and the components, environment and structure of the represented systems. Thus, each component identified in the TDD by a part number (P/N) corresponds to a system, an equipment or a physical part (hardware or software) with P/N marks in each represented system. The location of these components in the represented system is provided by the TDD maps. Each connection diagram (electrical and hydraulic), identified in the TDD, defines an aspect of its structure, i.e. the way in which the different pieces of each represented system will be physically interconnected.
Formally speaking, the map between a model M and a represented system Σ by this model M is an injective morphism h of M in Σ, that is to say each component of the model has a concrete referent in the composition of a represented system (the reverse is not true). Each structural relationship of a model has a concrete referent in the structure of a represented system (the reverse is not true). Two distinct signs of the model denote distinct entities of the represented systems. The expression h(M), therefore, represents all components, the environment and the structure of Σ denoted by the object model M.
If A is a piece situated in zone E of the model (TDD), then the physical piece of the represented system, denoted by A, should be located in the physical zone of a represented system, denoted by E (and vice versa). If A and B are two components of the model, linked together by an electrical relationship in the model, then the physical pieces of equipment represented by A and B should be linked together electrically in a represented system (and vice versa). Or even, if the model of piece A is part of the model of B, then the physical piece A will be part of the physical equipment B in a represented system (and vice versa).
Behavioral models: however, the object model does not provide us with any information about the intended or actual behavior of the represented systems. In order to be able to predict or explain it, in the same way as for the object model, a link will be established between the evolution of states of the represented system and the evolution of the state variables of the model. This link can be formed in two ways: (1) concretely using physical mock-ups and prototypes or (2) theoretically, using theoretical models and simulation.
Physical models: so, a wooden mock-up of a wing or a blade inside a wind tunnel, a wooden mock-up of a cockpit and a prototype of a helicopter are figurative concrete models of a type of wing, blade, cockpit and a type of helicopter from which it is possible to assess the behaviors of a wing and a blade, the ergonomics of a flight deck and the performance of helicopters of a given type. This link is, therefore, a material similarity that links the common physical properties to the model and the represented systems: for example, the curvature and area of the blade model and that of the represented blade, the position and distance of two panels on the mock-up and in real cockpits.
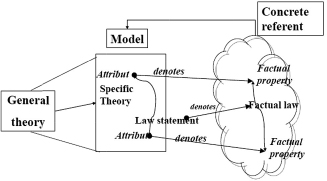
Theoretical models: another method to establish a link is to design a theoretical model of the represented systems of a given type. A theoretical model is a projection on an object model of a general theory (mechanical, electrical, multiphysical and automatic) that denotes the laws linking different essential properties of represented systems together. A theoretical model T of a type of systems is therefore composed of an object model M and a specific theory S. The similarity is no longer a material similarity but a formal similarity. The semantic assumptions are a mapping between factual properties of the represented systems and the different signs of the model denoting these factual properties, whereas the factual laws that really link these properties are denoted by law statements.
For example, a specific theoretical model of the aerodynamic behavior of an aircraft can be derived from the general theorems of dynamic when they are projected on an object model of this aircraft. In the same way, a specific theoretical model of an aircraft equations of motion can be derived from the equations of fluid mechanics, when projected on an object model of an aircraft.
Figure 4.8. Object model and theoretical model
As with object models, we can define a mapping between the theoretical model T and the represented systems Σ, as a morphism h on the formally possible behaviors of the theoretical model, on the one hand, and the actually possible behaviors of the represented systems, on the other hand. The behavior BΣ of systems of type Σ is the set of all actually possible trajectories in the space of states of Σ, whereas the behavior BT of a theoretical model T is formed from the total formally possible trajectories in the space of states of T, provided that these formally possible trajectories have physical correspondent.
Based on this theoretical model T, it is possible to make predictions with regard to the behavior of the represented systems either by calculation or by simulation. Expressed in a simulation language, the law statements forming a specific theoretical model can be executed step-by-step using a simulator. The simulator provides the engineer with the evolution of parameters he/she wishes to observe according to the previously defined scenarios, such as assessing the fuel consumption during the performance of a particular loop flight, the stability margins available during a particular maneuver or even the effects of balance on the stability and/or consumption of fuel.
4.5. Representativeness of models and the expressiveness of languages
All models are not equivalent; some models may be more representative than other models. Similarly, all languages used to define models are not equivalent. Some languages may be more expressive than others.
4.5.1. Representativeness of models
Object model representativeness: first, let us consider object models M of one type of systems Σ. Assuming that M1 and M2 are two object models of the same type of systems Σ, there are two morphisms h1 of M1 in Σ and h2 of M2 in Σ. If h1(M1) is the image of M1 in Σ and h2(M2) is the image of M2 in Σ, then two situations can occur:
An object model of a type of systems Σ is more representative than another object model if it provides more details about the composition, environment and structure of the represented systems. For example, a multilevel object model is more representative than an object model with only one level that does not express the whole-part relationships. Similarly, an object model that expresses neither the component attributes nor the relationships and the entities of the environment is less representative than a model that does so.
Theoretical model representativeness: now, let us consider two theoretical models T1 and T2 of a type of systems Σ. If B(Σ) represents all the actually possible behaviors of Σ, then B(T1) and B(T2) represent all the formally possible behaviors of models T1 and T2. There is an injective morphism h1 of B(T1) in B(Σ) (respectively, h2 of B(T2) in B(Σ)), which for each formal behavior b1 of B(T1) matches a behavior h1(b1)= b of B(Σ).
Let b1 (respectively, b2) be a behavior of the theoretical model T1 (respectively T2) denoting the same actually possible behavior b of Σ, then b1 is more representative of b than b2 if b1 is more accurate than b2 (i.e. the distance from b1 to b3 is shorter than the distance from b2 to b).
Now, if h1(B(T1)) and h2(B(T2)) denote the images of B(T1) and B(T2) in B(Σ), then:
In all cases, we can say that the theoretical model T supported by an object model M is more representative than the object model M itself.
Whatever the model of a type of systems Σ can be, it always has a limited representativeness. In a model, some aspects of reality are inevitably overlooked. This is why the morphism associating a model with the systems it denotes cannot be an “isomorphism”.
4.5.2. Expressiveness of a language
Now, if we examine the languages used to build object or theoretical models, we cannot exclude any, whether natural or artificial, literal or graphical. We can produce a model in any language, but the result will strongly depend on the language used.
Some of these languages have a limited expressiveness, that is to say, they can only produce one type of models such as the language of fault trees. This is a graphical artificial language that graphically denotes the possible combinations of events leading to a predefined undesirable event and supports the associated probability calculations. This is very useful when carrying out safety analyses, but it is of no use in many other situations.
Figure 4.9. Fault tree representation
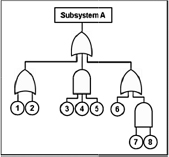
We can show that this type of fault representation can have equivalent representations such as reliability block diagrams with the same representativeness.
Figure 4.10. Reliability block diagram
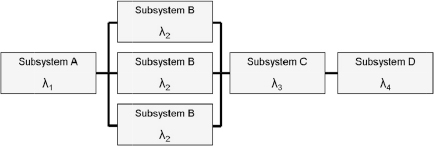
The language of fault trees and that of the reliability block diagram have the same expressiveness [MOD 10].
Let us compare artificial languages, such as VHDL-AMS [IEE 07] and VHDL [IEE 08]. These are two literal languages; the first is more expressive than the second in the sense that it allows the production of object models and theoretical models of discrete, continuous or hybrid systems, whereas the second only allows the production of object models and theoretical models of discrete systems.
Now, let us compare the artificial languages SA-RT [WAR 86] and SysML [OMG 12]. These are two graphical languages; the first is less expressive than the second in the sense that the first allows the production of less representative models than those produced using the second, but both have a limited capacity to produce theoretical models.
Finally, natural languages are those whose expressiveness is the greatest. This is the reason why object models or theoritical models are often annotated with additional comments in the form of semantic assumptions which the modeler adds to clarify his/her intention.
Nevertheless, natural languages do not guarantee the production of homomorphic models of the systems they denote. On the contrary, due to the abundance of figures of speech, they vary the way in which an object, an event or any other feature or behavior of a system can be denoted. These figures of speech sometimes appear as additional text, sometimes by deletion or removal, or even by rearrangement or substitution. This stylistic abundance at the engineer’s disposal poorly accommodates linguistic and cultural differences within a work community and is in direct conflict with the requirement to construct homomorphic models of the systems they represent.
This is why the engineering approach to model-based systems tries whenever possible not to use natural languages and instead use artificial languages adapted to producing homomorphic models of the represented systems.
1 Symbols are purely conventional [SAU 00].
2 Or to be produced in the future.
3 More precisely, a set of empirical data relating to b.