
15
Route Mapping of Multiple Humanoid Robots Using Firefly-Based Artificial Potential Field Algorithm in a Cluttered Terrain
Abhishek Kumar Kashyap1*, Anish Pandey2 and Dayal R. Parhi1
1Robotics Laboratory, Mechanical Engineering Department, National Institute of Technology, Rourkela, India
2School of Mechanical Engineering, KIIT University, Bhubaneswar, India
Abstract
The hybrid outcome of the Firefly Algorithm (FA) and Artificial Potential Field (APF) algorithm for humanoid control is preferred in the present study for navigational tasks. Initially, the APF algorithm is procured with sensory input concerning the barrier range in a different direction, source points, and respective targets that give an intermediate steering angle. It is then fed to FA to obtain the ultimate steering angle as an output. FA guides the robot close (safest distance) to the obstacle and optimizes the footsteps to provide a better path. Simulations and real-time experiments are carried out for the motion of multiple humanoids in a cluttered terrain. Humanoid robots have been shown to be able to maneuver comfortably from source point to target using the preferred algorithm. In the system containing multiple humanoid robots, one robot behaves like a dynamic obstacle to the other humanoids, leading to a conflicting situation during navigation. This situation is eliminated by the implementation of the dining philosopher controller in the base algorithm. The simulation and experiment result shows a good relationship with a deviation of under 6%. Finally, the established trajectory planning algorithm is also tested in contrast to the existing navigational model.
Keywords: Humanoid NAOs, dinning philosopher controller, artificial potential field, firefly algorithm, conflicting situation, navigation
15.1 Introduction
A humanoid robot is a robot designed to look like a human figure. This model can be used for practical applications, including the interaction with human resources and situations, for experimentation, or other applications, such as the analysis of bipedal movement. They typically contain torso, head, hand and limbs, while some types of them can only build a portion of the structure from the waist. Some humanoids also have faces to mimic facial characteristics like the eyes and mouths of humans. Scientists research the design and actions of the human body. The effort at simulating the body, on the other hand, allows for a deeper perception of it. The area of human perception focuses on the way people operate from sensory input to gain cognitive and motor abilities. This expertise is utilized to construct human behavior statistical systems and has improved with time. Quite innovative robotics have been proposed that improve the quality of common people. Coarse mapping of humanoids is always one of the most influential research areas because of the difficulties implicit in designing joint gestures. It is relevant to the robot’s motion in a familiar or unfamiliar terrain from the source position to the goal by shunning obstacles in the path. The terrain can be possibly static or dynamic, which depends upon the state of obstacles. The robot must travel along the optimum route in a required period for effective navigation that could be accomplished by using different computational intelligence methods. The choice of computer technology varies on the utility and the workspace provided to the robot for the execution of the task. There are 24 degrees of freedom (DOF) in the robotic platform (NAO) used for the demonstration of the proposed algorithm. Various researches have been done on various types of algorithms [1–7]. They are mainly categorized in conventional algorithms and nature-based algorithms. As such, most of these approaches require differential details and an adequate initial position of the objective concept and limitations. On the other side, non-deterministic or stochastic approaches are unpredictable and yield various strategies. The benefit is that these approaches simultaneously investigate many areas of the objective function and can avoid the optimal from the local minimum. This approach is thus more able to handle NP-hard problems (i.e., issues that do not have recognized polynomial-time outcomes). Various researches are carried out to date, few of them are discussed over here.
Li et al. [8] have suggested an optimization of the routes expected by a mobile robot using the hybrid genetic algorithm (GA). In order to get the shortest route, Saeedi and Mahdavi [9] have developed a computational formula with ant colony optimization (ACO). Lee et al. [10] have suggested an improved ACO fix tract preparation-related issues. For numerous robotic systems, Panda et al. [11] have developed a hybrid model by integrating the FA with the invasive weed optimization (IWO) technique. They have utilized used the hybrid model to prevent unnecessary divergence in the wide area of issue and establish a proper equilibrium between development and absorption. Lagunes et al. [12] have suggested a hybrid FL–FA framework for the management of the Fuzzy system model optical specificity allotment, and FA has been able to produce and test data for the Fuzzy model for autonomous robots. FA helps evaluate the robot’s current route utilizing the optimal route FL. In [13], FA has been introduced as a hybrid technique for artificial bee colony (ABC) to improve optimized value by minimizing the complexity of each process. The result calculated is utilized to control and balance mobile robots. Jelena et al. [14] have suggested a rule-based fuzzy system and a stochastic method-based learning technique. They have looked at the radial base neural network and showed that the changed shape of the network is similar to the fuzzy controller that they assume to be a neuro-fuzzy method. Acosta et al. [15] have employed a mobile robot neuro-fuzzy technology. The findings of the method are successful (i.e., shunning the hindrances when the mobile robot has achieved the goal). The Neuro-Fuzzy method to direct a mobile robot has been put forward by Marichal et al. [16]. They have demonstrated that such a neuro-fuzzy framework only handles a sole mobile robot successfully. A robotic manipulator guidance system has been documented by Althoefer et al. [17]. A hybrid model of fuzzy logic and neural networks is the guidance process. The robot arms in multiple situations have effectively performed the analysis. In a partly unknown area, Nefti et al. [18] have implemented a neuro-fuzzy inference method for mobile robot guidance. The experimental data affirm the value for movement of a Mobile Robot in partly unknown environments of the advanced technique. In order to take into account any APF for barriers and frameworks during optimal track calculations, Rasekhipour et al. [19] have constructed an APF route plan system for unmanned road vehicles. Malone et al. [20] have used the APF method for runtime scheduling and used a stochastic approach to achieve precise fields of avoiding object. APF traps quickly into a local maximum, leading the robot to a halt due to its zero resulting power. To remedy these APF defects, many advanced methodologies are created. In order to overcome the different aspects of the conventional APF, unattainable challenge, Sun et al. [21] have suggested an enhancement based on the diverse knowledge and the technique to hop. Liu et al. [22] have defined a crucial function on the basis of the range between the robot and the barrier to adjust the orientation of repulsion to prevent the local minimal point. In order to eradicate APF flaws, some researchers try to integrate the intelligent method with APF. The curvature velocity method (CVM) [23], for particular, measures potential contour by removing those that interfere with the barriers. The best velocity pair is determined by the optimization problem of a CVM after taking the complementary curves. In its working space, Velocity Obstacles (VO) [24] utilizes the speed of moving entities. These speed values limit the real speed space of the robot. Therefore, due to the consolidation measures to the goal position, the final vector is chosen from the permissible speed. The Dynamic Window Approach (DWA) [25] finds accessible speeds to be appropriate speeds within such a short period. This means that speed pairs cannot stop the robot without impact can be removed. The remainder pairs of speeds measured by the goal parameter and the maximum speed pair are performed using this approach. The plan is suggested by Nishiwaki and Kagami [26] to adapt future footing and ZMP trajectory. In order to sustain stable equilibrium, Stephens [27] has used an essential control system to interpret the disruption as impulsive. Liu and Atkeson [28] have analyzed the robot’s equilibrium centered on a time-consuming route library. The seamless and shunning-free route for humanoids has been developed by Schmid and Woern [29] using the NURBS curve. In implementing an innovative structure to take the design conditions into consideration, Pham and Parhi [30] have implemented a neural network for mobile robots as a possible navigation technique. Niskiwaki et al. [31] suggested a route planning method for humanoids in a dynamic setting based on a laser range finder. Yoo and Kim [32] have built a gazing framework for navigation in challenging situations of humanoid robots. The inability to escape barriers is an essential problem for humanoid navigation. The schema described in [33] utilizes line-based scene interpretation and functionality tracking to cross or walk over barriers in organized indoor situations. Vision supported with scope sensors has been also utilized for barrier prevention humanoid navigation in [34]. This work identifies barriers with laser details and then uses that knowledge to train visual classificatory which are mainly added to the frames during autonomous navigation. Some work focuses on creating stable dynamic motions in obstacle-focused situations [35]. These studies have been designed for humanoid models, such as the HRP-2, and previous awareness of the measurements of barriers. An expanded variant of the WPG [36] has been implemented newly in [37], which takes the foot orientation into account and is used to prevent obstacles by utilizing the robot HRP-2. However, a non-linear program with a time period that is computationally intensive must be solved by the corresponding statistical model.
Chen and Dong [38] have focused on the reactive navigational strategy for robots based on sensory perception using the grey system and refinement of the produced path using reinforcement learning. The grey reinforcement learning system model is imposed for better control of primitive robot behavior in cluttered environments. Gavrilov and Lenskiy [39] have proposed a path-planning approach for mobile robot navigation in unknown environments using the interaction system based on short term memory and online NN network combined with the back-propagation approach. Meyes et al. [40] have proposed an efficient path planning strategy for humanoid robots based on the reinforcement learning strategy. The methodology is generated for the effective motion of the humanoid for industrial applications involving the Industry 4.0 and Cyber Production concept. Chaysri et al. [41] have considered the path planning of two mini-robots, driven on the power obtained from vibrational motors and guided by a low-speed controller. The methodology involves the usage of reinforcement learning for collision-free navigation in unknown environments. Jiang and Xin [42] have proposed a path-planning approach for mobile robots in free-space environments using the improved Q-learning method. The implemented method helps in the collision-free motion of humanoid robots in the unknown workspace. Rath et al. [43] have proposed a hybrid fuzzy logic-GA approach for path planning of a multi-humanoid system in a cluttered space. The implemented methodology is combined with a Petri-Net controller for dynamic obstacle avoidance. Kloetzer and Mahulea [44] have worked on the path planning of mobile robot teams based on the linear temporal logic along with the Petri-Net [45] controller for avoiding an inter-robot collision.
Current humanoid navigation techniques are typically aimed at restricted workspace factors. In addition, a static setting for navigational research has been assumed for the majority of activities, which cannot be the situation in real-life situations. A versatile navigational control system can be used for pain navigation in simple and complex terrains to meet the enhanced performance and growth objectives of process control. Self-contained strategies can be effective for humanoid navigation in a static and relatively less complex terrain. Although when navigating in dynamic and complicated terrains, certain drawbacks can arise. Hybridization is thus intended to incorporate the efficiency and reliability of standalone approaches into one method. Several scientists have integrated individual performance improvement approaches. Various articles showing the hybridization of various effective techniques are available that show efficient results compared to standalone techniques [46–51].
The aforementioned reference from the literature indicates the requirement for a powerful humanoid navigation function. The suggested research focuses, therefore, on the concept, formulation, and deployment, in the sense of both static and dynamic environmental scenarios, of a new hybrid framework for humanoid navigation. Two strategies, i.e., firefly algorithm (FA) and artificial potential field (APF), are combined to improve the suggested navigation operator in order to achieve rapid convergence like conventional approaches and high precision AI approaches. It is possible to highlight the significant additions to the existing study as follows. Humanoid navigation is still far from optimization in realistic creations. A stable and smart system is needed to include sufficient flexibility for a humanoid robot, which can take intelligent action on the basis of terrain. Furthermore, multiple humanoids need to be navigated simultaneously on a common terrain in order to prevent potential inter-collisions. The present research has, therefore, been focusing on designing, developing and implementing a reliable hybrid Navigation System based upon FA based APF that can function intelligently in complex situations to ensure the protection of obstacles and the optimized achievement of the targets. In the current study, therefore, smooth movement control is considered, along with avoiding static and dynamic barriers in complex environments. It is tested in the simulated terrains. The suggested hybrid framework has been validated in laboratory-generated simulation and experimental scenarios. In recognition of the chosen navigation variables, the data collected from both systems are evaluated, and the near agreement is maintained with minimum error limits. In addition, in comparison with some other established navigational control systems for validity testing, the built hybrid model is tested, with considerable improvements in results.
15.2 Design of Proposed Algorithm
The algorithm that is to be designed and implemented in this article is the hybrid product of artificial potential field and firefly algorithm. In this section, the mechanism of standalone algorithms are presented.
15.2.1 Mechanism of Artificial Potential Field
The APF procedure is essentially based on the charges induced and electrical flows. It operates by integrating the attraction and repulsion power extracted from its attractive and repulsive potentials. In common, the robot and the barriers have identical charges and the robot and the goal have different charges. The robot is thus repelled by the barriers and attracted by the goal. The path of the resulting forces is utilized to navigate the robot to its goal in an uncertain area while preventing barriers. The following mathematical concepts can be taken into account to provide a clearer explanation of the navigation of the humanoid using the APF technique.
Assume ![]() represents the robot’s cartesian location coordinate. The potential field artificially produced that is a blend of attractive (induced by goal) potential field and repulsive (produced by barriers) fields is provided by [52]:
represents the robot’s cartesian location coordinate. The potential field artificially produced that is a blend of attractive (induced by goal) potential field and repulsive (produced by barriers) fields is provided by [52]:
Here
F(pc) = Total potential field
FAf(pc) = Field of attraction
FRf(pc) = Field of repulsion
In Eq. (15.1), the potential field structure referred to is used to derive the strengths of the humanoid by the negative gradient. The positive and negative potential field is responsible for drawing the route towards the goal is represented in Figure 15.1. The force FI on the robot because of the field impact is represented as:
15.2.1.1 Potential Field Generated by Attractive Force of Goal
For the robot and the goal, an attractive potential gradient is established as relatively similar accusations are allocated. The goal attainment of the robot is the responsibility for this area. The attractive field is considered a quadratic potential field defined by this study.

Figure 15.1 Path generation due to the attraction and repulsion force of goal and obstacle respectively.
Here
Ac = Attractive field’s coefficient (positive)
pi = Robot’s instantaneous
pG = Goal location.
By considering the negative coefficient of potential function FAf (pc), the attraction is determined and presented as:
Here the Ac is a variable coefficient which inversely depends on the magnitude square of resulting of location vectors. Ac is based on representation of Coulomb force as the concept of variable coefficient.
The force of attraction described in two components in x and y direction is represented as:
15.2.1.2 Potential Field Generated by Repulsive Force of Obstacle
Between the robot and the barriers in the appropriate sensor range, a repulsive field is created. For this study, the minimum range for the control system initialization is considered as 24 cm. Theoretically, the same sort of load is allocated to the robot and the resulting force moves the robot out of barriers that contribute to the robot’s avoidance of barriers. The radius of activation for humanoid robot is taken as ract.
The repulsive strength is determined by the negative variance of the potential field FRf (pc)
Representing it in the two component in x and y direction as:
If the number of barriers present in the terrain is n, then the total force is represented as:
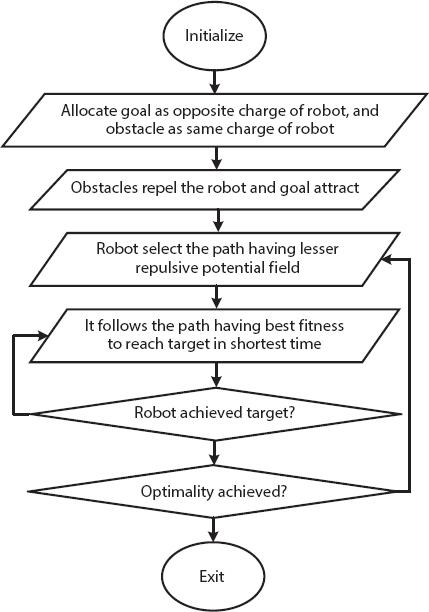
Figure 15.2 Flowchart of firefly algorithm for robot path planning.
The flowchart describing the implementation of the APF method in the navigation of humanoid robots is presented in Figure 15.2.
15.2.2 Mechanism of Firefly Algorithm
In 2008, Yang [53] has introduced the metaheuristic design of Fireflies’ blinking conduct-inspired methodology. It is a modern method of artificial intelligence broadly applied in all fields of autonomy and optimization. The flames in the atmosphere originated from the flickering behavior. Bioluminescence is the mechanism wherein the firefly reflects light and the light is utilized to draw other fireflies as a guidance device. The attractiveness of male and female fireflies is based on the pattern of a flashlight, the frequency of light flickering as well as the luminous flash. The flickering illumination of the fireflies is utilized to refine and design a new optimization method with an objective function. The fireflies attract one another when the other has the better luminosity, and that’s the fundamental principle of FA activity. The following are three fundamental firefly algorithm guidelines.
- Both fireflies, irrespective of gender, are unisexual and attract each other.
- The extent to which a firefly is attractive is proportional to its luminosity, and therefore the less shiny one would be shifted to the shiny one. For the greater luminosity, the gap between adjacent fireflies is smaller. The random motion is equivalent to the luminosity of the fireflies.
- The optimization problem for assessing the luminosity of fireflies is produced.
The firefly’s attractiveness as Af (r) with initial value ![]() is represented as [54]:
is represented as [54]:
Here, r represents the random number and β is the coefficient of light absorption.
The gap between adjacent fireflies is,

Here, n is the dimension of firefly, xi is the position of ith firefly and ![]() is the present value of ith firefly in jth dimension. The motion of a firefly along the shiny one is represented as:
is the present value of ith firefly in jth dimension. The motion of a firefly along the shiny one is represented as:
Here, pr represents the randomized parameter and t is the number of iteration.
The flowchart and pseudocode of the algorithm is represented in Figures 15.3 and 15.4, respectively.
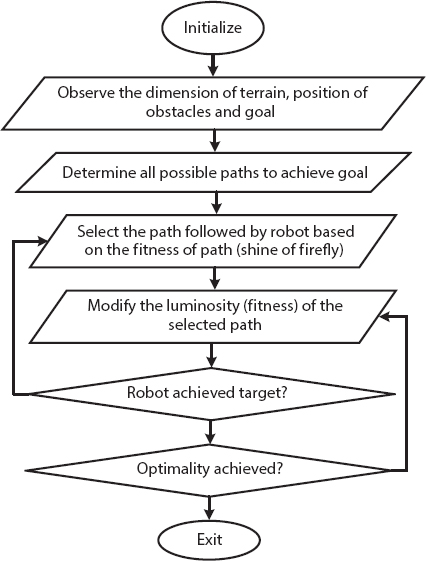
Figure 15.3 Flowchart of firefly algorithm for robot path planning.
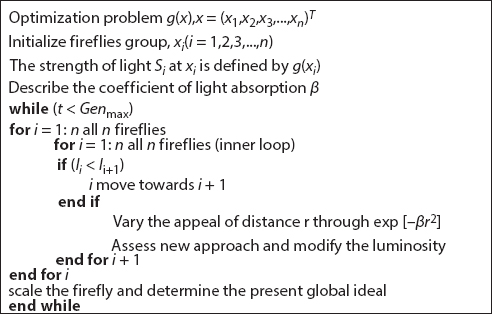
Figure 15.4 Pseudocode of firefly algorithm for robot path planning.
15.2.2.1 Architecture of Optimization Problem Based on Firefly Algorithm
For navigation of a humanoid robot, blinking firefly behavior is utilized to calculate the optimum route planning if the robot is crowded by barriers. Efficient route planning for robots with FA has been established here in a reasonable time. Route planning for robots is the creation of optimal values to fulfill those performance requirements in a plan that involves challenges such as barrier detection, preventing barriers, dealing with stuck situations, preventing random walking, optimizing the route, etc. During movement in the area, the sensors on the robot collect details about the surroundings, allowing the robot to find its location in unknown environments. With this sensor, data on shape, size and location of the barrier is delivered, and robots travel on to the target without hitting the barrier using this sensory data. The primary objective of this research study is to achieve optimum and safe trajectory preparation for humanoid robots. The challenge of navigation route optimization is eventually translated into the task of minimization and later represented as an optimization problem based on the evaluation and barrier location as preferred variable when FA is implemented. In the procedure of success, the robot explicitly identifies a target location without using an artificial intelligent framework by locating a globally shiny firefly identified for each iterations and extends in the batch to this location. The FA control system has the aforementioned main objectives:
- Designing and developing an efficient route planning framework to avoid collisions.
- In order to ensure that the robot does not shift altered in its terrain.
- To obtain particular simulation and experimental outcomes.
- In comparison with the other navigational system to achieve better results.
The benefits of the FA for the optimization problem are the following:
- It can deal with linear and non-linear issues as well as multimodel issues.
- There is a very high conversion rate.
- Calculation costs are minimal.
- It is possible to follow a hybrid model using other strategies.
- To begin its iterative procedure, it does not involve a good preliminary approach.
15.2.2.1.1 Barrier Avoidance Behavior
When the situation is unpredictable, navigation is a complicated job for any humanoid robot. The confusion may be that the challenge or target is changing. In terms of shape and size, the barrier in the terrain can differ. Robot demands barrier avoidance framework for successful navigation in a complicated setting so as to prevent collisions with barriers. The FA generates the set of unique fireflies close to the barrier and the higher number of fireflies identified from the group based on shininess. The shiner firefly should be chosen in such a manner that the closest barrier is at the highest possible safe distance. The robot holds the place of the fireflies and the analysis methodology for the nearest shiner firefly begins until the secure and optimal route is created. The appropriate firefly preferred using the Euclidean distance among the firefly and the nearest barrier indicated in Eq. (15.19).
The Euclidean distance ![]() between the ith firefly of coordinate
between the ith firefly of coordinate ![]() and obstacle of coordinate (Ox, Oy) is represented as:
and obstacle of coordinate (Ox, Oy) is represented as:
The identification of the nearby barrier for the optimal route generation is important in the complicated terrain and the distance among adjacent barriers is thus determined by Eq. (15.20).
The Euclidean distance ![]() between the robot of the coordinate (Rx, Ry) and nearby obstacle of coordinate
between the robot of the coordinate (Rx, Ry) and nearby obstacle of coordinate ![]() is represented as:
is represented as:
15.2.2.1.2 Target Finding Behavior
The shiner firefly is here chosen in the arbitrary range of fireflies so as to have the maximum range from the barrier and the minimum range between the same firefly and the target. This is the ongoing search for shiner fireflies over time until the target is achieved. The actual brighter firefly location must always be at least a short-range from the target location. Eq. (15.21) indicates the Euclidean distance ![]() between target and firefly. The Euclidean distance between the ith firefly of coordinate
between target and firefly. The Euclidean distance between the ith firefly of coordinate ![]() and target of coordinate (Tx, Ty) is represented as:
and target of coordinate (Tx, Ty) is represented as:
The research represents the behavior of barrier avoidance and the target-search behavior to improve the objective role of fireflies to optimize road planning problem as follows
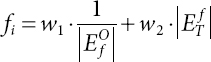
In accordance with the optimization problem methodology, the terrain is taken with n barriers and expressed as O1, O2, O3,…,On with their coordinate locations ![]() respectively. When barriers come in robot’s sensor threshold range while navigating in the terrain, the number of barriers is identified. The significance of
respectively. When barriers come in robot’s sensor threshold range while navigating in the terrain, the number of barriers is identified. The significance of ![]() is high when the fireflies (fi) are away from the barrier, and if the fi falls nearer to the target, the value of
is high when the fireflies (fi) are away from the barrier, and if the fi falls nearer to the target, the value of ![]() is decreased. Consequently, optimization problem analysis utilizing FA is subject to the optimal solution of minimization that facilitates to identify the optimal route planning for humanoid robots. Here, w1 is the variable to suit that defines path safety; w2 determines the maximum and minimal travel length. When w1 is the maximum, the robot can comfortably escape the barrier without colliding the boundary and raise the likelihood of a collision with w1 decreased value. Likewise, w2 it minimizes the length of the path and vice versa. Therefore, the correct selection of the process parameters for the local minimal issue determines how objective robot route optimization functions succeed. For checking objective function variables, the trial and error approach has been utilized.
is decreased. Consequently, optimization problem analysis utilizing FA is subject to the optimal solution of minimization that facilitates to identify the optimal route planning for humanoid robots. Here, w1 is the variable to suit that defines path safety; w2 determines the maximum and minimal travel length. When w1 is the maximum, the robot can comfortably escape the barrier without colliding the boundary and raise the likelihood of a collision with w1 decreased value. Likewise, w2 it minimizes the length of the path and vice versa. Therefore, the correct selection of the process parameters for the local minimal issue determines how objective robot route optimization functions succeed. For checking objective function variables, the trial and error approach has been utilized.
15.2.3 Dining Philosopher Controller
Dining philosopher models [55, 56] are employed for navigation with dynamic systems on a common terrain. It is a simultaneous framework developed to overcome multiple robots disputes when they meet a common barrier. The present work has centered on the navigation of multiple humanoids on a common terrain. In order that barriers present in the terrain are avoided robot and the destination is reached in minimum time, the presented hybrid navigation framework is implemented. However, the navigational framework cannot assess preference for motion if the robots experience complex barriers. The proposed method, therefore, requires a dining philosopher control scheme to prevent potential interconnections. Figure 15.5 is the structure of the dining philosopher control is included in the research work. An oval pattern suggests the robot’s current location in the above system model, and the mark of the bar indicates the change from one step to the next.
The layout has six stages and can be interpreted at each stage as follows.
- Stage I: Stage I depicts robots with no previous information of the role of other robots at unspecified positions in the environment. Here, all robots await to step towards their corresponding objectives with the start order. Here, all robots await to step towards their corresponding objectives with the start order.
- Stage II: The goal following behavior is triggered in this stage and all robots can continue to their corresponding goals and in effect identify barriers.
- Stage III: The robots reach this stage following the identification of a complex barrier.
- Stage IV: In this stage, one that has a shorter route to the goal is given greater preference and goes ahead, whereas the other one is a stationary barrier at its location to prevent disagreement among robots.
- Stage V: At this stage, the robots analyze the conflicting scenario and continue if those scenarios are missing.
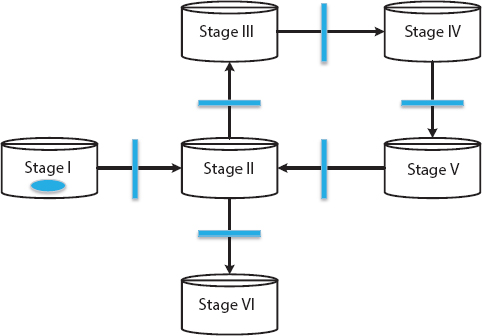
Figure 15.5 Architecture of dining philosopher controller for solving the conflicts during navigation of multiple robots on common platform.
- Stage VI: It’s a stage of waiting. If a robot is already encountered in levels III by an additional robots, it must serve as a static barrier and check for the initial set. The robot continues his path from stage II afterwards.
By using the framework of control, navigation multiple robots can be possible in single terrain.
15.3 Hybridization Process of Proposed Algorithm
The APF algorithm is a classical approach; it converges the result rapidly but may trap in local minima. The FA is a nature-based algorithm that provides optimized travel length and travel time but may converge slowly. Therefore, this hybridization is made to get rid of the limitations of both algorithms. Initially, the APF algorithm is procured with sensory input concerning the barrier range (obstacles in the right direction (ORD), obstacles in the left direction (OLD) and obstacles in the front direction (OFD)), source points, and respective targets that gives intermediate steering angle based upon attraction and repulsion behavior of APF algorithm. The next move is to feed the FA with the intermediate angle to obtain the ultimate steering angle that will lead the humanoid into a safer path, thereby eliminating the risk of collision with any obstacle throughout the workspace.
The navigation of multiple humanoid robots in a common platform is a complex task. Because the robots encounter not only the randomly placed static barrier but also a dynamic barrier, the other humanoid identifies as the dynamic obstacle to each other that creates a situation of disputes. It can be eliminated by the insertion of a decision-making controller in the proposed algorithms. Here, the dining philosopher controller has been used, which is put with the proposed controller to give primacy to the robot, which has a relatively easier path to reach the target. The block diagram of the hybridization process is depicted in Figure 15.6.
15.4 Execution of Proposed Algorithm in Multiple Humanoid Robots
In order to verify the optimum route and time needed to navigate the established FA based APF based control system, a WEBOT simulation program has been preferred to test the navigation of multiple robots with corresponding goals in a common environment. The control strategies acquired are regarded as the robot’s initial location when avoiding obstacles. The outcomes of the simulation have been checked in the existence of varying static and obstacles in the 3D environment of 240 cm × 320 cm square dimension. The humanoid robot navigation is displayed in Figure 15.7.
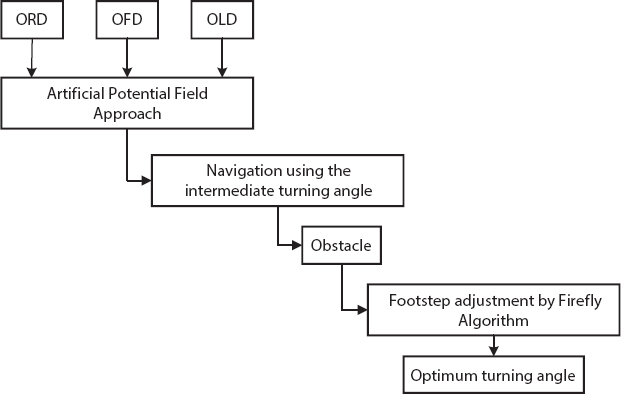
Figure 15.6 Architecture of proposed controller for robot path planning.
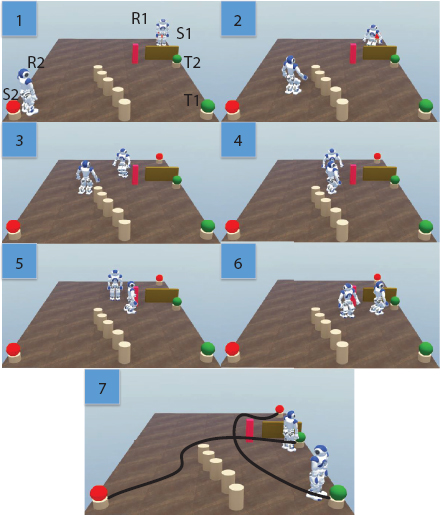
Figure 15.7 Simulation result of robot path planning using FA based APF controller.
In order to keep the robot’s path is optimal and smooth, it must be kept a safe distance from obstacles in the complicated terrain. Humanoid robots can simply escape moving barriers (other humanoids) by applying FA based APF navigational strategy along with the dining philosopher controller. Two robots are assigned as R1 and R2, which are placed at S1 and S2. Their respective goals are T1 and T2. The robots are being fed with the proposed controller and demonstration in simulation and experimental terrains are started.
Successful testing of the terrain with a moving robot has been demonstrated in Figure 15.7, where robots pursue the target until it achieves it.
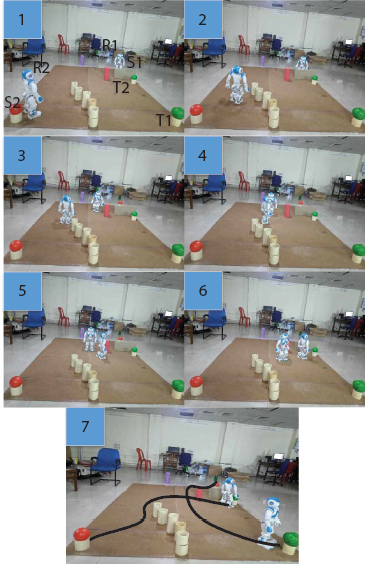
Figure 15.8 Experimental result of robot path planning using FA-based APF controller.
In the event of different challenges, in real-time, the efficiency of the FA based APF based decision control system is illustrated. The Humanoid robot is fitted with two infrared sensors effective for emissions and read signals. These sensors are held on the face of the robot and are able to quantify the distance between 5 cm and 25 cm the sensors. The syntax for programming C is included throughout the experiment to code the software of humanoid robot navigation. Route planning uses GPS-based position methodology. To prevent a conflict between robots, the dining philosopher method is adopted. The standardized environmental configuration is assumed for experimental and simulation evaluation in order to analyze the behavior of the implemented FA based APF based controller based on the trajectory and time. Twenty observations are conducted for the study of multiple robot systems. The simulation and experimental results are portrayed in Figures 15.7 and 15.8, respectively. Tables 15.1 and 15.2 display an ideal simulation route and a lower navigational time than the experimental results for the first robot (R1). Similarly, for the second robot (R2), simulated path length (cm) and time spent (s) in navigation are portrayed in Tables 15.3 and 15.4, respectively. For simulation and experiments, the results observed are approximately similar, and the variance rate is less than 6%.
Table 15.1 Path length (cm) deviation between simulation and experimental result of the first robot (R1).
| Sl. no. | Simulation | Experiment | Variance (%) |
| 1. | 325.2 | 339.2 | 4.31 |
| 2. | 313.7 | 326.6 | 4.11 |
| 3. | 329.6 | 340.5 | 3.31 |
| 4. | 312.3 | 327.4 | 4.84 |
| 5. | 322.5 | 333.5 | 3.41 |
| 6. | 318.7 | 330.8 | 3.8 |
| 7. | 317.1 | 332.2 | 4.76 |
| 8. | 311.9 | 327.4 | 4.97 |
| 9. | 322.9 | 336.6 | 4.24 |
| 10. | 313.3 | 323.5 | 3.26 |
| Avg. | 318.72 | 331.77 | 4.101 |
Table 15.2 Time spent (s) deviation between simulation and experimental result of the first robot (R1).
| Sl. no. | Simulation | Experiment | Variance (%) |
| 1. | 76.02 | 79.85 | 5.04 |
| 2. | 70.15 | 73.25 | 2.29 |
| 3. | 77.65 | 81.11 | 4.46 |
| 4. | 66.44 | 69.35 | 4.38 |
| 5. | 71.11 | 74.94 | 5.39 |
| 6. | 70.68 | 74.11 | 4.85 |
| 7. | 69.81 | 72.13 | 3.32 |
| 8. | 69.38 | 71.53 | 3.1 |
| 9. | 71.21 | 75.08 | 5.43 |
| 10. | 70 | 73.62 | 5.17 |
| Avg. | 71.245 | 74.497 | 4.343 |
Table 15.3 Path length (cm) deviation between simulation and experimental result of the second robot (R2).
| Sl. no. | Simulation | Experiment | Variance (%) |
| 1. | 341.8 | 346.4 | 1.35 |
| 2. | 330.3 | 344.3 | 4.24 |
| 3. | 346.2 | 350.4 | 1.21 |
| 4. | 328.9 | 345.3 | 4.99 |
| 5. | 339.1 | 349.1 | 2.95 |
| 6. | 335.3 | 343.5 | 2.45 |
| 7. | 333.7 | 356.1 | 6.71 |
| 8. | 328.5 | 345.5 | 5.18 |
| 9. | 339.5 | 357.4 | 5.27 |
| 10. | 329.9 | 347.7 | 5.4 |
| Avg. | 335.32 | 348.57 | 3.975 |
Table 15.4 Time spent (s) deviation between simulation and experimental result of the second robot (R2).
| Sl. no. | Simulation | Experiment | Variance (%) |
| 1. | 99.27 | 104.41 | 5.18 |
| 2. | 93.4 | 97.81 | 4.72 |
| 3. | 100.9 | 105.67 | 4.73 |
| 4. | 89.69 | 93.91 | 4.71 |
| 5. | 96.36 | 101.6 | 5.44 |
| 6. | 93.93 | 98.67 | 5.05 |
| 7. | 93.06 | 96.69 | 3.9 |
| 8. | 92.63 | 96.09 | 3.74 |
| 9. | 94.46 | 99.64 | 5.48 |
| 10. | 93.25 | 98.18 | 5.29 |
| Avg. | 94.695 | 99.267 | 4.824 |
15.5 Comparison
It is examined towards an established navigational system in order to efficiently demonstrate the feasibility of the hybrid system model designed. Zhang et al. [57] have created an independent robotic agents’ Neuro-Fuzzy-based navigational control system. Figure 15.9 shows a comparative analysis of the path between the fluctuating logic-based approach [57] and the hybrid control framework established, and Table 15.5 shows a correlation of path length. The hybrid control method analysis has provided better outcomes than the current navigation framework that confirms its improved performance. In addition, the established controller navigates multiple humanoids in an open framework with maximum obstacle detection and usability, which is considered in contrast to other current systems as the improvements of the proposed system. The improvement of around 23% is recorded that displays the superiority of the proposed controller.
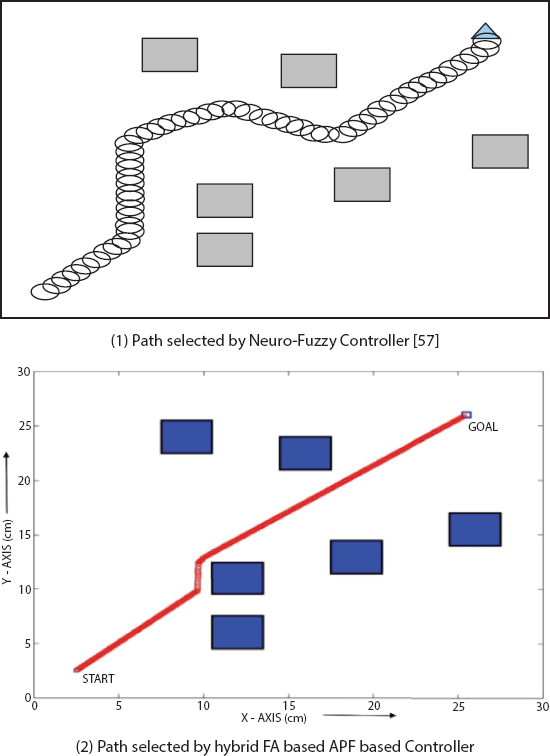
Figure 15.9 Comparison between proposed controller and existing controller based on path length.
Table 15.5 Path comparison (s) between proposed controller and Neuro-Fuzzy Controller [57].
| Sl. no. | Neuro-Fuzzy controller | FA based APF based controller | Improvement (%) |
| 1. | 38.75 | 29.8 | 23.1 |
15.6 Conclusion
In the case of various static and dynamic barriers, APF and FA have been used to establish a methodology of effective navigation in unpredictable conditions. The implemented FA based APF based control system offers the optimum route for multiple mobile robot systems with an efficient obstacle prevention mechanism at minimal computing expense. Dining philosopher controller is implemented in the base controller to eliminate the disputes between robots during navigation. It prioritized one robot which is in a better position to achieve the target. It also reflects the greatest engagement when the environment is made up of dynamic obstacles and corresponding targets of multiple robots. The effects of simulation and experiment are almost the same, and the variance percentage is below 6%. It has been noted that the path taken by the FA based APF control system is short, and over 23% route length is retained compared to other intelligent methods. The proposed controller with various improvements can be applied to the navigation of humanoid robots in uneven terrains.
References
1. Kashyap, A.K., Parhi, D., Pandey, A., Improved Modified Chaotic Invasive Weed Optimization Approach to Solve Multi-Target Assignment for Humanoid Robot. J. Robot. Control, 2, 194–199, 2021.
2. Bej, N. et al., Optimum Navigation of Four-Wheeled Ground Robot in Stationary and Non-stationary Environments Using Wind-Driven Optimization Algorithm, in: Innovative Product Design and Intelligent Manufacturing Systems, pp. 931–941, Springer, Rourkela, India, 2020.
3. Kashyap, A.K. and Pandey, A., Optimized Path Planning for Three-Wheeled Autonomous Robot Using Teaching–Learning-Based Optimization Technique, in: Advances in Materials and Manufacturing Engineering, pp. 49–57, 2020.
4. Pandey, A., Kashyap, A.K., Parhi, D.R., Patle, B.K., Autonomous mobile robot navigation between static and dynamic obstacles using multiple ANFIS architecture. World J. Eng., 16, 275–286, 2019.
5. Lagaza, K.P., Kashyap, A.K., Pandey, A., Spider Monkey Optimization Algorithm Based Collision-Free Navigation and Path Optimization for a Mobile Robot in the Static Environment, in: Advances in Mechanical Engineering, pp. 1459–1473, 2020.
6. Kashyap, A.K. and Pandey, A., Different Nature-Inspired Techniques Applied for Motion Planning of Wheeled Robot: A Critical Review. Int. J. Adv. Robot. Autom., 3, 1–10, 2018.
7. Kashyap, A.K., Pirewa Lagaza, K., Pandey, A., Dynamic Path Planning for Autonomous Mobile Robot using Minimum Fuzzy Rule Based Controller with Avoidance of Moving Obstacles, in: 2018 International Conference on Recent Innovations in Electrical, Electronics & Communication Engineering (ICRIEECE), Bhubaneswar, India, pp. 3330–3335, IEEE, 2018.
8. Li, Q., Tong, X., Xie, S., Zhang, Y., Optimum path planning for mobile robots based on a hybrid genetic algorithm, in: Proceedings—Sixth International Conference on Hybrid Intelligent Systems and Fourth Conference on Neuro-Computing and Evolving Intelligence, HIS-NCEI 2006, 2006.
9. Saeedi, S. and Mahdavi, I., Using Ant Colony Optimization for Shortest Path, in: Optimization, pp. 2–7, 2007.
10. Lee, J.W., Kim, J.J., Choi, B.S., Lee, J.J., Improved Ant Colony Optimization algorithm by potential field concept for optimal path planning, in: 2008 8th IEEE-RAS International Conference on Humanoid Robots, Humanoids 2008, 2008.
11. Panda, M.R., Dutta, S., Pradhan, S., Hybridizing Invasive Weed Optimization with Firefly Algorithm for Multi-Robot Motion Planning. Arab. J. Sci. Eng., 43, 4029–4039, 2018.
12. Lagunes, M.L., Castillo, O., Soria, J., Garcia, M., Valdez, F., Optimization of granulation for fuzzy controllers of autonomous mobile robots using the Firefly Algorithm. Granul. Comput., 4, 185–195, 2019.
13. Abbas, N.H., Design of a Kinematic Neural Controller for Mobile Robots based on Enhanced Hybrid Firefly-Artificial Bee Colony Algorithm. Al-Khwarizmi Eng. J., 12, 45–60, 2016.
14. Godjevac, J. and Steele, N., Neuro-fuzzy control of a mobile robot. Neurocomputing, 28, 127–143, 1999.
15. Acosta, L., Marichal, G.N., Moreno, L., Méndez, J.A., Rodrigo, J.J., Obstacle avoidance using the human operator experience for a mobile robot. J. Intell. Robot. Syst., 27, 305–319, 2000.
16. Marichal, G.N. et al., Obstacle avoidance for a mobile robot: A neuro-fuzzy approach. Fuzzy Sets Syst., 124, 171–179, 2001.
17. Althoefer, K., Krekelberg, B., Husmeier, D., Seneviratne, L., Reinforcement learning in a rule-based navigator for robotic manipulators. Neurocomputing, 37, 51–70, 2001.
18. Nefti, S., Oussalah, M., Djouani, K., Pontnau, J., Intelligent adaptive mobile robot navigation. J. Intell. Robot. Syst. Theory Appl., 30, 311–329, 2001.
19. Rasekhipour, Y., Khajepour, A., Chen, S.K., Litkouhi, B., A Potential Field-Based Model Predictive Path-Planning Controller for Autonomous Road Vehicles. IEEE Trans. Intell. Transp. Syst., 18, 1255–1267, 2017.
20. Malone, N., Chiang, H.T., Lesser, K., Oishi, M., Tapia, L., Hybrid Dynamic Moving Obstacle Avoidance Using a Stochastic Reachable Set-Based Potential Field. IEEE Trans. Robot., 33, 1124–1138, 2017.
21. Sun, J., Tang, J., Lao, S., Collision Avoidance for Cooperative UAVs with Optimized Artificial Potential Field Algorithm. IEEE Access, 5, 18382–18390 2017.
22. Liu, Y.J., Dai, T., Song, J.H., Research of path planning algorithm based on improved artificial potential field. J. Shenyang Ligong Univ., 36, 61–66, 2017.
23. Simmons, R., Curvature-velocity method for local obstacle avoidance, in: Proceedings—IEEE International Conference on Robotics and Automation, 1996.
24. Gal, O., Shiller, Z., Rimon, E., Efficient and safe on-line motion planning in dynamic environments, in: Proceedings—IEEE International Conference on Robotics and Automation, 2009.
25. Kashyap, A.K., Parhi, D.R., Muni, M.K., Pandey, K.K., A hybrid technique for path planning of humanoid robot NAO in static and dynamic terrains. Appl. Soft Comput., 96, 106581, 2020.
26. Nishiwaki, K. and Kagami, S., Strategies for adjusting the ZMP reference trajectory for maintaining balance in humanoid walking, in: Proceedings—IEEE International Conference on Robotics and Automation, 2010.
27. Stephens, B., Integral control of humanoid balance, in: IEEE International Conference on Intelligent Robots and Systems, 2007.
28. Liu, C. and Atkeson, C.G., Standing balance control using a trajectory library, in: 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2009, 2009.
29. Schmid, A.J. and Woern, H., Path planning for a humanoid using NURBS curves, in: IEEE International Conference on Automation Science and Engineering, 2005, Edmonton, AB, Canada, pp. 351–356, IEEE, 2005.
30. Pham, D.T. and Parhi, D.R., Navigation of multiple mobile robots using a neural network and a Petri Net model. Robotica, 21, 79–83, 2003.
31. Nishiwaki, K.I., Chestnutt, J., Kagami, S., Autonomous navigation of a humanoid robot over unknown rough terrain using a laser range sensor. Int. J. Rob. Res., 31, 1251–1262, 2012.
32. Yoo, J.-K. and Kim, J.-H., Gaze control-based navigation architecture with a situation-specific preference approach for humanoid robots. IEEE/ASME Trans. Mechatron., 20, 2425–2436, 2015.
33. Cupec, R., Schmidt, G., Lorch, O., Vision-guided walking in a structured indoor scenario. Automatika-ZAGREB, 46, 49, 2005.
34. Maier, D., Stachniss, C., Bennewitz, M., Vision-based humanoid navigation using self-supervised obstacle detection. Int. J. Hum. Robot., 10, 1350016, 2013.
35. Stasse, O., Verrelst, B., Vanderborght, B., Yokoi, K., Strategies for Humanoid Robots to Dynamically Walk Over Large Obstacles. IEEE Trans. Robot., 25, 960–967, 2009.
36. Herdt, A. et al., Online Walking Motion Generation with Automatic Footstep Placement. Adv. Robot., 24, 719–737, 2010.
37. Naveau, M. et al., A Reactive Walking Pattern Generator Based on Nonlinear Model Predictive Control. IEEE Robot. Autom. Lett., 2, 10–17, 2017.
38. Chen, C. and Dong, D., Grey system based reactive navigation of mobile robots using reinforcement learning. Int. J. Innov. Comput. Inf. Control, 6, 789–800, 2010.
39. Gavrilov, A.V. and Lenskiy, A., Mobile robot navigation using reinforcement learning based on neural network with short term memory. In International Conference on Intelligent Computing 2011 Aug 11 (pp. 210-217). Springer, Berlin, Heidelberg.
40. Meyes, R. et al., Motion planning for industrial robots using reinforcement learning. Proc. CIRP, 63, 107–112, 2017.
41. Chaysri, P., Blekas, K., Vlachos, K., Navigation of inertial forces driven mini-robots using reinforcement learning, in: 2019 10th International Conference on Information, Intelligence, Systems and Applications (IISA), Patras, Greece, pp. 1–8, IEEE, 2019.
42. Jiang, J. and Xin, J., Path planning of a mobile robot in a free-space environment using Q-learning. Prog. Artif. Intell., 8, 133–142, 2019.
43. Rath, A.K. et al., Path optimization for navigation of a humanoid robot using hybridized fuzzy-genetic algorithm. Int. J. Intell. Unmanned Syst., 7, 112–119, 2019.
44. Kloetzer, M. and Mahulea, C., Path planning for robotic teams based on LTL specifications and Petri net models. Discrete Event Dyn. Syst. Theory Appl., 30, 55–79, 2020.
45. Pandey, A. and Parhi, D.R., Multiple Mobile Robots Navigation and Obstacle Avoidance Using Minimum Rule Based ANFIS Network Controller in the Cluttered Environment. Int. J. Adv. Robot. Autom., 1, 1–11, 2016.
46. Kashyap, A.K., Parhi, D.R., Kumar, S., Dynamic Stabilization of NAO Humanoid Robot Based on Whole-Body Control with Simulated Annealing. Int. J. Hum. Robot., 17, 2050014, 2020.
47. Parhi, D.R., Advancement in navigational path planning of robots using various artificial and computing techniques. Int. Robot. Autom. J., 4, 133–136, 2018.
48. Parhi, D.R., Kumar, P.B., Chhotray, A., Rawat, H., Experimental and Simulation Analysis of Hybrid Ant Colony Genetic Technique Using AI Methodology for Mobile Robot, 2018., Intelligent navigation of multiple mobile robots using an ant colony optimization technique in a highly cluttered environment. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science. 225(1):225-32, 2011 Jan 1.
49. Parhi DR, Pothal JK. Intelligent navigation of multiple mobile robotsusing an ant colony optimization techniquein a highly cluttered environment. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science. 1, 225, 225-32, 2011 Jan 1.
49. Patle, B.K.K., Pandey, A., Jagadeesh, A., Parhi, D.R.R., Path planning in uncertain environment by using firefly algorithm. Def. Technol., 14, 691–701, 2018.
50. Kashyap, A.K. and Parhi, D.R., Particle Swarm Optimization aided PID gait controller design for a humanoid robot. ISA Trans., 114, 306–330, 2020.
51. Kashyap, A.K. and Parhi, D.R., Optimization of stability of humanoid robot NAO using ant colony optimization tuned MPC controller for uneven path. Soft Comput., 1, 306–330, 2021.
52. Rimon, E. and Koditschek, D.E., Exact Robot Navigation using Artificial Potential Functions. IEEE Trans. Robot. Autom., 8, 501–518, 1992.
53. Yang, X.-S., Firefly algorithm, in: Nature-Inspired Metaheuristic Algorithms, Luniver Press, Berlin, Heidelberg, 2008.
54. Brand, M. and Yu, X.H., Autonomous robot path optimization using firefly algorithm. Proc.—Int. Conf. Mach. Learn. Cybern, vol. 3, pp. 1028–1032, 2013.
55. Cargill, T.A., A robust distributed solution to the dining philosophers problem. Software Pract. Exp., 12, 965–969, 1982.
56. Choi, B. et al., A starvation-free solution of the dining philosophers’ problem by use of interaction systems, in: 2017 56th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), Los Angeles, CA, USA, vol. 12, pp. 965–969, IEEE, 2018.
57. Zhang, N., Beetner, D., Wunsch, D.C., Hemmelman, B., Hasan, A., An Embedded Real-Time Neuro-Fuzzy Controller for Mobile Robot Navigation, in: The 14th IEEE International Conference on Fuzzy Systems, 2005. FUZZ ‘05, Reno, NV, USA, pp. 319–324, IEEE, 2005.
*Corresponding author: [email protected]