
7
A Cooperative Navigation for Multi-Robots in Unknown Environments Using Hybrid Jaya-DE Algorithm
D. Chandrasekhar Rao
Department of Information Technology, VSSUT, Burla, India
Abstract
Since inception robotics has emerged as a major scientific discipline, several development and research has been carried out in the past decades to improve its efficiency. The robot navigates from its predefined starting positions to the designed goal positions to perform the desired tasks as assigned by the end-user. Safe navigation in addition to attain shortest path is of prime concern in the problem of interest. Significant effort has been made in the early research work to make robot intelligent via several algorithms to address the concern. The proposed algorithms do not substantiate solutions of interest in the case of multi-robot path planning. Furthermore, the inevitability of achieving path smoothness as well as minimizing energy requirement has made the present problem more complex. Therefore, there is a need of searching some computationally stable algorithms that can provide the desired solutions with less computational burden. The emerging of meta-heuristic approaches has made possible of solving numerous complex engineering optimization problem because of some positive attributes such as: 1. Simple; 2. Easy to implement; 3. Robust; and 4. Computationally stable. The need of the present scenario is to figure out some meta-heuristic approaches whose architecture resembles the multi-robot path planning problem. To achieve this, an efficient navigation controller embedding hybrid Jaya-DE algorithm has been proposed to obtain an optimum path of individual robot. The efficiency of proposed navigation controller is evaluated through simulation. The outcomes of the simulation reveal the efficacy of the suggested controller in monitoring the robots towards achieving a safe and optimal path. The strength of the suggested controller is further verified with the similar problem framework. The potency of the proposed controller can be seen from the outcome in resolving the navigation of mobile robots as compared to its competitor.
Keywords: Multi-robot navigation, waypoints, Jaya algorithm, differential evolution, V-Rep, Pioneer-P3dx
7.1 Introduction
Robotics is a multidisciplinary branch of engineering and science that involves design and control of robots for different applications. It has been employed in many areas [1–8] due to its efficiency in executing tasks in minimum time and cost. The untiring endeavor of the scientific community has enabled the robots in resolving issues related to the society in many precarious situations. In the initial phase of development, most of the works have been focused on stationary robots for the industrial applications. With the advent of time mobile robots seem to be more efficient than the stationary robots in many applications due to its locomotion. The task solving aptitude of robots has made them viable in industrial sectors to accomplish the task as assigned. It is as well capable to execute certain tasks in complex and hazardous environments where it is not possible for a human being to survive. In most of the applications, a robot needs to perform navigation and exploration of the environment which is a primary concern for any mobile robot. Thus, navigation planning of mobile robotics has been a topic of interest among researchers across various disciplines of engineering.
One of the most key perspectives of robots in any mobile robot application is to find a trajectory for itself, such that, it should reach the target in an optimal and safe way. However, the navigation strategy of mobile robots depends on the type of environment where they are placed in. Thus, the environment for mobile robots can be broadly classified as:
- Static environment, where the initial and target position of robots are fixed and it may contain some static obstacles.
- Dynamic environment, where the initial position is fixed, but the target position may be static or dynamic, and the obstacles in the environment may be static or moving with some velocity.
Depending on environment specific information of robots the navigation strategy can be further classified into two categories:
- Navigation planning in a known environment, where the robot having prior information about the start and end position of itself and the position of obstacles in the environment. Thus, robot needs to plan its trajectory before navigation—global navigation planning.
- Navigation planning in a partially known or unknown environment, where the robot knows the start and goal position of itself but, no prior knowledge about obstacles position. Robot needs to use its sensory data to gather local information about the environment. Sometime referred as local navigation planning.
The detailed classification for navigation planning of robots is depicted in Figure 7.1.
Navigation is the ability of a mobile robot to perform its motion planning in an environment to carry out certain task by moving from one location to another. Based on the movement of a mobile robot, it may be autonomous or non-autonomous. The autonomous mobile robot utilizes its sensory information about the surrounding to control its movement. However, the motion of a non-autonomous robot is controlled by an external remote operator. There are four aspects of mobile robot navigation [9], namely
- Navigation Planning,
- Localization,
- Perception, and
- Motion control.
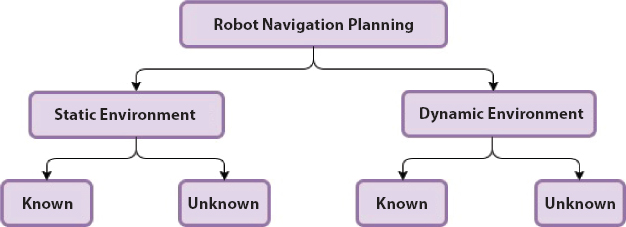
Figure 7.1 Classification for robot navigation planning.
The process of covering a safe and shortest path by robots in the environment is referred to as Navigation planning. Localization refers to estimating its current position with respect to the problem space. Perception is the process of collecting information about the surrounding or environment using the sensors. The process of transferring the sensory information to govern the physical movement of robot to reach the target is known as motion control. The improvement of the autonomy and decision accuracy of a mobile robot for carrying out assigned task is complex and technically a challenging issue. The mobile robots need to travel around the environment to carry out the tasks in many applications. Thus, mobile robot navigation is one of the elementary issue in these applications. To navigate safely, the mobile robot need to explore the workspace independently. The exploration of workspace by multi-robot is much beneficial as they have the potential to execute the tasks concurrently and quickly in comparison to the single robot.
A mobile robot’s navigation planning is intended to define an appropriate trajectory from its source location to the target position by evading environmental barriers. Numerous research has been carried out to address the issues associated with robot navigation. These techniques essentially attempt to optimize the solution for a given objective function, and determine the action to be performed from the set of possible actions with certain constraints.
Based on the above consideration, in this chapter, an efficient method is proposed for multi-robot navigation (MRN) in an unknown static environment using hybrid Jaya-DE algorithm. Via simulation, the viability of the proposed technique has been checked and its efficiency is compared to state-of-the-art.
The remainder of this research is structured as follows. A brief survey of relevant works in the mobile robot navigation domain is provided in Section 7.2. The problem formulations for multi-robot navigation are defined in Section 7.3. In Section 7.4, the simple Jaya algorithm and its hybridization for MRN are discussed. The simulation and performance assessment of the method proposed is archived in Section 7.5. Lastly, Section 7.6 provides the conclusion and potential scope.
7.2 Related Works
Several methods have been proposed for mobile robot and can be widely categorized as traditional and soft computing approach. The classification of various approaches has been depicted in Figure 7.2.
A significant number of navigation planning approaches exist. However, all the approaches are not addressing the problem in full generality. For example, some approaches having limitation with the dimension of the environment and the shape of the obstacles. Despite of these differences, the traditional approaches are based on some general techniques such as:
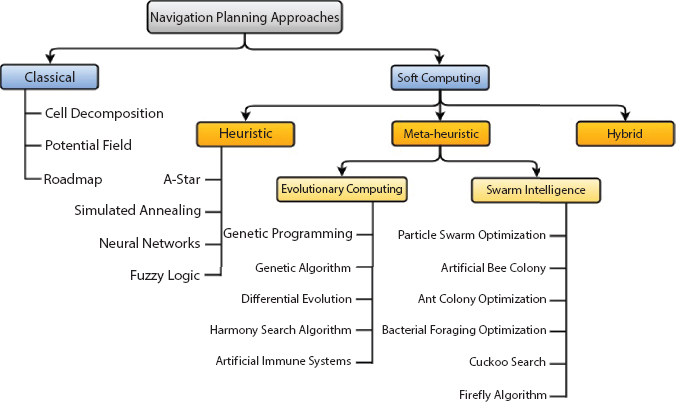
Figure 7.2 Taxonomy of approaches.
- a) Cell Decomposition,
- b) Potential Field, and
- c) Roadmap.
The configuration space (C) for each of these approaches is assumed to be known. The regions occupied with obstacles in the configuration space is denoted as C-obstacle. The free space in the configuration space is treated as free configuration. The robot is represented as a point or circle in the configuration space. The details about the formulation of configuration space can be found in [10].
The mobile robot navigation employing Cell decomposition [11–13], Potential field [14, 15] and Roadmap [16] are simple and easy to implement, but, it is more suitable for global planning. The potential field approach is efficient as compared to the other classical approaches due to its simplicity of implementation. The potential field approach is capable of global as well as local planning, however, it can be easily trapped at local optimum, inefficient in finding path in the middle of closely placed obstacles, oscillating in the existence of large obstacles and narrow passages [17]. The classical approaches are not suitable for the environment consisting of dynamic obstacles. With an increased dimension of the configuration space, the complexity of classical approaches increases. Most of the classical approaches in literature addressed the issues of motion planning for single robot. Due to the above limitations researchers emphasized more on heuristic based soft computing approaches for solving MRN problem. Below, some of them are addressed.
Dewangan et al. [18] proposed a priority based collision free navigation path for multi-robot employing ant lion optimization method. The efficiency of the approach has been investigated through simulation in different environments with multiple mobile robots. Establishing Path planning and cooperative navigation in an efficient way are two mostly challenging issues in multiple robots. To meet the complexity and issues related to multiple robots, the author [19] has brought improvements in PSO framework by introducing the coevolution mechanism. The three key parameters of PSO have been enhanced in an adaptive manner employing evolutionary game theory. The proposed technique has been tested in both single and multi-robot platforms. The results generated by authors seem to be promising compared to its competitor algorithms. In another research contribution, the author [20] employed PSO assisted GWO to solve the path planning problem of multi-robot by formulating a multi-objective function. The hybridized technique enabled the algorithm to generate smoother path and also confirms both path safety and optimized path length. The viability of the algorithm has been tested through simulation work under different scenarios. The results come out of the algorithm was promising. The standalone Ant algorithm suffers low diversity and poor convergence. To eradicate this problem and make the algorithm viable for multi robot application, the author [21] has strengthened the standalone algorithm by improving the collaboration among ants employing an adaptive strategy. The learning and pheromone balancing are the two strategies on which the proposed algorithm has been constructed. The proposed methodology has proved its potential in numerous experimental tests. The research contribution by Sharma et al. [22] is mainly attributed to exploration area of multi robot. In the process of exploration, the robots gather information to reach an area used for consequent navigation. The nature inspired algorithm such as PSO, BFA and BA has been extensively analyzed to get the proper exploration area. The outcomes of these three different algorithms confirm the superiority of PSO over the rest two algorithms. For precise modeling of the environment Bakdi et al. [23] incorporated vision system using image processing. In generating a safe path for robots from source to destination the author implemented genetic algorithm. The generated path is smoothened using “Piecewise Cubic Hermite Interpolating Polynomial” method. The adaptive fuzzy logic controller is then used to monitor the robot’s navigation on the designated path. The proposed methodology was validated through RobuTER in an indoor environment.
Albina et al. [24] proposed an efficient exploration of workspace for multi-robot by synchronizing the exploration and grey wolf optimizer with a hybrid process. The potency of the proposed method evaluated in both complex and simple workspaces through simulation. The outcome confirms the efficiency over deterministic approach. The process of obtaining the optimized path length in an unfamiliar environment employing FPA and BA was the focus of research work in [25]. The authors describe the basic principles on which the algorithm works. The underlying problem of path planning was solved by formulating an objective function and optimized by both FPA and BA. The simulation work was carried out using MATLAB. Experimentation was also carried out to verify the authenticity of simulation. Toufan et al. [26] suggested an improved grey wolf optimizer for path planning of multiple robots in unknown environments using a laser range finder (LRF). The proposed methodology was validated through simulation using V-Rep simulator. The simulation outcome shows that, relative to its predecessors, the proposed approach seeks an ideal path with minimal execution time and energy usage. The authors [27] investigated the multi-target pursuit behavior of multi-robot in an unknown dynamic environment. To solve the underlying problem, the combined evolutionary programming and the artificial bee colony were applied. With the goal of obtaining the best neighborhood points, the artificial bee colony was introduced and the path obtained by joining the neighborhood points was then made smoother by applying the evolutionary algorithm. The effectiveness of the proposed technique was verified against A* algorithm, PSO, GA. The outcome reveals the superiority of the proposed algorithm over others in terms of path length, path smoothness and execution period. A local search algorithm based on the position updating process of krill’s is hybridized with DE algorithm to control the navigation of multi-robot in unknown static environment [28]. Though the outcome reveals its potency in finding a safe and optimal path, but with the increase of robots in the environment there is increase in deadlock situations. To avoid this deadlock, a trust based navigation approach [29] was embedded. Further, the navigation of multi-robot was studied in an unknown dynamic environment by hybridizing the “intelligent water drop (IWD)” algorithm with DE [30]. The proposed approach embedded with prediction of obstacle behavior mechanism to estimate the behavior of dynamic obstacle. The performance of proposed approaches is verified against the state-of-the-art in a dynamic environment through simulation.
The methodologies developed by the research community in solving the navigation planning of multi-robot has been discussed above. The superiority of metaheuristic in obtaining the solutions over classical approach is evident from the above literature review. The solutions obtained from the above techniques still demands for further refinement in some key parameters such as path smoothness, path deviation and collision avoidance related to MRN. The methodology adopted in the present work has eliminated the mathematical burden in obtaining superior and feasible solution. One such technique is the hybrid Jaya-DE algorithm that has been critically examined in obtaining the discussed parameters. The potential of the approach has also compared with its competitor approaches.
7.3 Problem Formulation
The configuration space for MRN is considered as 2-dimensional workspace populated with polygonal shaped stationary obstacles. The problem formulation is made to find an efficient, smooth and safe trajectory for each robot in the workspace. The following assumptions are considered while designing the algorithm.
- a) There is a predefined start and target location of the individual robot in the workspace.
- b) The heading direction of all the robots are initially towards their target position.
- c) All the robots start their navigation planning at the same time from their respective start position.
- d) The workspace is randomly populated with polygonal shaped stationary obstacles.
- e) The mobile robots are able to change their velocity and direction of motion at any instance of time till reaching at their respective target position.
- f) The structure of all the robots are identical.
In the current study, the three parameters, such as path length including its smoothness and path safety are considered to achieve the desired objective of MRN. The minimum a path length of robot is, lesser the time of travel and energy utilization are. The trajectory of individual robot in the workspace can be represented by sequence of waypoints between the source and goal position as shown in Figure 7.3.
Let, Si, Gi, and wp are the start location, target location and number of waypoints between source and target location of robot i, respectively. Then, the navigation path of robot (Ri) can be expressed as a set of sub-paths between the waypoints as follows
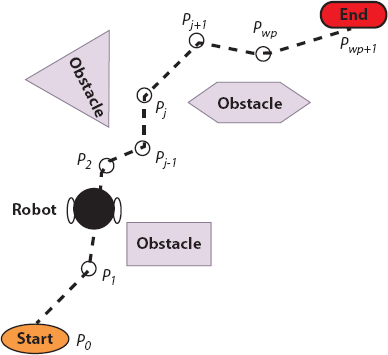
Figure 7.3 Illustration of navigation path of a robot with waypoints.
the navigation path of robot (Ri) can be expressed as a set of sub-paths between the waypoints as follows
where the waypoints ![]() represent the source, target and jth intermediate point of robot i, respectively. Thus, the navigation path travelled by ith robot is the summation of all sub-paths from its source to target position and can be mathematically formulated as follows:
represent the source, target and jth intermediate point of robot i, respectively. Thus, the navigation path travelled by ith robot is the summation of all sub-paths from its source to target position and can be mathematically formulated as follows:
where ![]() indicates the Euclidean distance between two successive waypoints
indicates the Euclidean distance between two successive waypoints ![]() The total path covered for n number of robots in the workspace can be written as follows:
The total path covered for n number of robots in the workspace can be written as follows:
Each robot always attempts to move towards its target position in order to reduce the path distance between the robot and the target position in the goal seeking actions. The path length to be covered by the robot i, denoted as ![]() the following can be expressed as:
the following can be expressed as:
where Ci, Ni and Gi denotes the current, next and target position of ith robot, respectively. The waypoints in the robot trajectory will increase when it wants to achieve more smoothness in its path. The deviation angle at the waypoint affects the smoothness of path, i.e. the less the angle of deviation is, the more the smoothness of path is. Conversely, the more the smoothness of path is, the more the energy utilization is. In order to balance the tradeoff between path smoothness and energy utilization, the maximum smoothness of path is achieved by decreasing the maximum deviation angle. For illustration, let us take the following scenario, in which the mobile robot wants to navigate from its starting place to the goal place as shown in Figure 7.4.
It can be observed, there exist two possible paths for the robot to reach its destination, i.e. [p0 − p1 − p3] and [p0 – p2 − p3]. By choosing the path [p0-p1-p3], the total angle of deviation for robot is (θ1 + θ2) and (θ3 + θ4) for the path [p0 – p2 − p3]. From Figure 7.4, it is clear that (θ3 + θ4) > (θ1 + θ2), as a result, the navigation path of the robot with the intermediate waypoint p1 is smoother as compared to the path with waypoint p2. In order to attain the path smoothness of robot, we need to minimize the waypoints as well as the maximum deviation angle. The degree of path smoothness for ith robot can therefore be defined as follows:
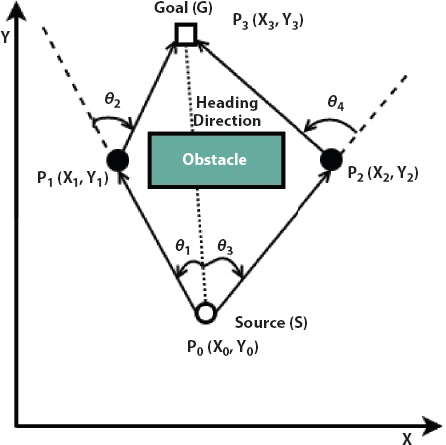
Figure 7.4 Illustration for navigation planning of robot for path smoothness.
where ![]() represents the angle with which the robot i deviates from its original path while navigating from the waypoint
represents the angle with which the robot i deviates from its original path while navigating from the waypoint ![]() to
to ![]() through
through ![]() and can be expressed as follows:
and can be expressed as follows:

where ![]() denotes the coordinate position of the waypoint
denotes the coordinate position of the waypoint ![]() Apart from shortest path and path smoothness, the navigation path of robot must be safe. The mobile robot is expected to escape from obstacles and teammates by maintaining a safe distance from them. While navigating, a robot may encounter one or more obstacles in its path. If more than one obstacle surrounds the mobile robot, then the obstacle with minimum distance to it will be considered for planning its next course of action. For estimating how much close the robots move to the obstacles in its path, the degree of path safety, denoted as
Apart from shortest path and path smoothness, the navigation path of robot must be safe. The mobile robot is expected to escape from obstacles and teammates by maintaining a safe distance from them. While navigating, a robot may encounter one or more obstacles in its path. If more than one obstacle surrounds the mobile robot, then the obstacle with minimum distance to it will be considered for planning its next course of action. For estimating how much close the robots move to the obstacles in its path, the degree of path safety, denoted as ![]() can be formulated using a linear function as follows:
can be formulated using a linear function as follows:
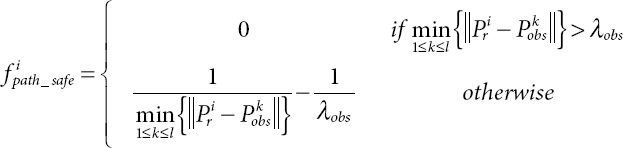
where ![]() is the constant factor for path safety that the robot need to maintain from obstacles,
is the constant factor for path safety that the robot need to maintain from obstacles, ![]() is the current position of robot i, in the sensing range of ith robot,
is the current position of robot i, in the sensing range of ith robot, ![]() is the current location of kth obstacle, for k = {1, 2,…,l}. Incorporating the above discussed formulas for path distance, smoothness and safety of path, a single objective optimization model for MRN can be formulated and stated as follows:
is the current location of kth obstacle, for k = {1, 2,…,l}. Incorporating the above discussed formulas for path distance, smoothness and safety of path, a single objective optimization model for MRN can be formulated and stated as follows:
where w1, w2 and w3 are the weight factors for path length, deviation of angle and path safety, respectively. The faster convergence of objective function mainly depends on the values of the weight parameters. Hence, the parameters values are chosen carefully by empirical method. In the current study, the values of w1, w2 and w3 are “0.6 unit/pixel, 0.15 units/ radian and 0.25-unit pixel”, respectively.
7.4 Multi-Robot Navigation Employing Hybrid Jaya-DE Algorithm
7.4.1 Basic Jaya Algorithm
Jaya Algorithm [31] is one of the simplest and prevailing optimization algorithms for resolving multi-objective problems. To live and flourish in their respective environments, the Jaya algorithm imitates the actions displayed by bio-logical organisms. In our eco-system, there are a million different species available. However, imitating the most successful member of the group at the same time shifting away from the unsuccessful member of the group is a typical behavior displayed by most animals. Likewise, in the Jaya algorithm, the solutions are equivalent to a group of some species in the current population. The most effective and ineffective group members represent the best and worst solution, respectively.
The initial solutions for Jaya algorithm are generated randomly for population size m in a d-dimensional search space as follows
Since, the population vector is expected to change over the different generations, it is possible to express the individual population vector of the current generation as:
There is a specific limit for performance indices of the problem, where the indices are computed within a certain range. By randomizing the individual within the search space, the initial run of the Jaya algorithm (at G = 0) should uniformly cover the entire search domain as much as possible. Hence, the jth element for ith individual in the initial generation could be stated as follows:
where randj is a uniformly distributed random number in the range [0,1], ![]() are the maximum and minimum search space bound in the dimension j. The solution is then modified as follows for every iteration.
are the maximum and minimum search space bound in the dimension j. The solution is then modified as follows for every iteration.
where, ![]() denotes the best candidate value for the sth variable, Pr, s, worst denotes the worst candidate value for the sth variable, Pr, s, t denotes the tth candidate solution in rth iteration for sth variable, Pr +1, s, t denotes the updated value of Pr, s, t at (r+1)th iteration, βr, s, 1 and βr, s, 2 are the two random numbers for sth variable in rth iteration.
denotes the best candidate value for the sth variable, Pr, s, worst denotes the worst candidate value for the sth variable, Pr, s, t denotes the tth candidate solution in rth iteration for sth variable, Pr +1, s, t denotes the updated value of Pr, s, t at (r+1)th iteration, βr, s, 1 and βr, s, 2 are the two random numbers for sth variable in rth iteration.
The selection process of Jaya algorithm ensures a mature convergence. The fitness of new solution at every iteration is evaluated based on the fitness function defined in Eq. (7.8). The fitness value of old and new solution is compared, if the new solution fitness is better than the previous solution, then the new solution is considered for next iteration by discarding the previous solution otherwise the previous solution is considered for next iteration. The MRN employing Jaya algorithm could be stated as follows
- a) Initialize the population as per the expression in Eq. (7.11)
- b) Evaluate the fitness of individual as per the present position using the expression stated in Eq. (7.8).
- c) Find the positions with best and worst fitness value.
- d) Update the position of individual robot as per the expression in Eq. (7.12)
- e) Repeat Step-a to Step-d until goal location of the robot is reached.
The working parameters in basic Jaya algorithm is chosen randomly from a predefined range. However, looking to the problem of MRN, the solution obtained need to be refined, in achieving an optimum solution. Further, it has been observed out of many runs, the Jaya algorithm does not ensure an optimal solution always. Thus, the DE operators are embedded into Jaya algorithm in a novel way to refine the solution obtained.
7.5 Hybrid Jaya-DE
One of the simplest and most efficient stochastic algorithms for continuous function optimization is Differential Evolution (DE) [32]. It uses the mutation and crossover operators or further refining the solution obtained from Jaya algorithm.
7.5.1 Mutation
The mutation operation can be viewed as a perturbation of initialized population with a random element. Through the mutation operation, the target vector produced from the Jaya algorithm is processed to produce the mutant vector as follows:
where F is a positive scaling factor lying in the range [0.5, 1], Pbest (G) is a pair of optimum value of decision variables with the minimum fitness function value, ![]() are randomly chosen samples from the current generation. The indices
are randomly chosen samples from the current generation. The indices ![]() are randomly selected mutually exclusive integers from the range [1, m].
are randomly selected mutually exclusive integers from the range [1, m].
7.5.2 Crossover
The next operation to mutation is crossover. Crossover operation facilitates the exchange of information between the mutant and target vector to generate a trial vector. As per the following expression, the binomial crossover method is used to produce the trail vector.

where randi, j ∈ [0, 1] is a random number of uniform distribution for every jth component of the parameter vector i, Cr is the real number chosen from the interval [0, 1], known as crossover rate, which serves as a control parameter to preserve the population diversity and jrand ∈ [0, 2,…, d] is an integer selected randomly, which ensure that the trail vector Ti (G) should obtain at least one component from the mutant vector Mi (G). Finally, to find the updated location of the individual robot, the selection operator is used.
7.5.3 Selection
DE algorithm ends with selection mechanism to decide the survival of the target or the trail vector in the subsequent generation by evaluating their performance. The selection is mainly made as per the fitness value. To evaluate the one that will continue for the subsequent generation, a distinction is made between the trial and the target vector. The mechanism of selection can be defined as follows:

where the objective function value to be minimized is denoted by f(●).
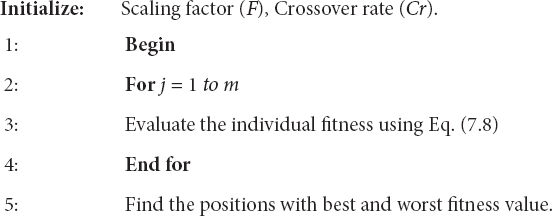
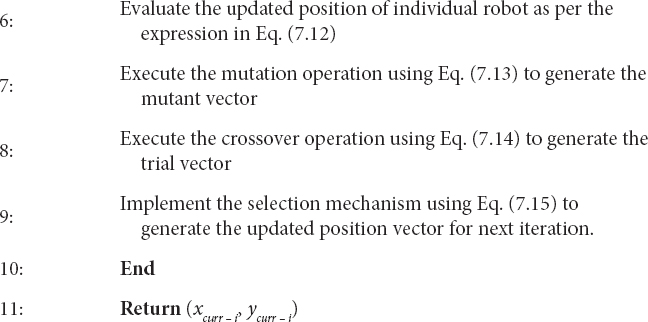
In Algorithms 1 and 2, the detailed steps of the hybrid Jaya-DE algorithm for multi-robot navigation are presented.
Algorithm 1 Distributed approach for navigation planning of multiple mobile robot.
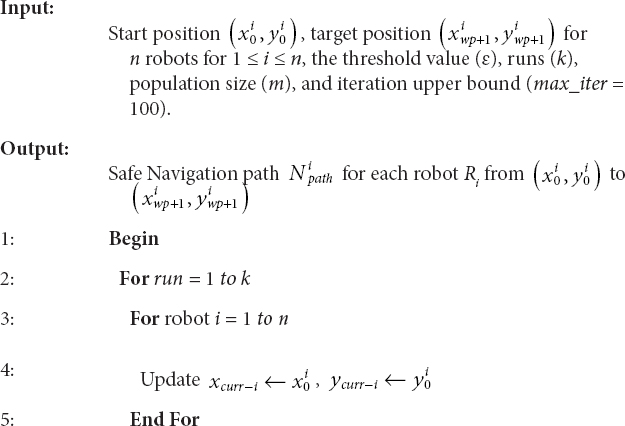
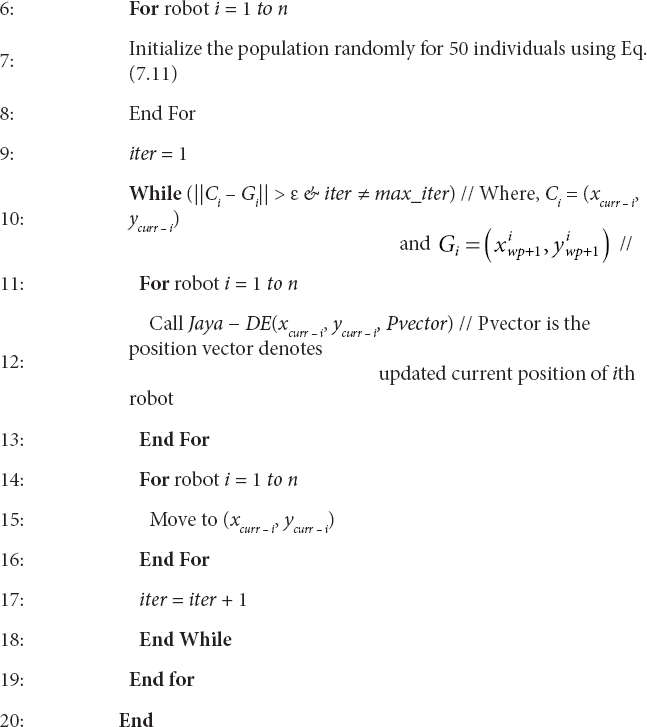
Algorithm 2: Procedure Jaya − DE(xcurr – i, ycurr – i, Pvector)
7.6 Simulation Analysis and Performance Evaluation of Jaya-DE Algorithm
The performance of MRN employing DE is discussed in this section. The workspace for MRN is modelled through the V-Rep 3.4.0 simulator [33]. The simulation is performed on a desktop with 6 GB of RAM and a Core i7 processor. The Pioneer P3dx mobile robot is considered for the simulation study and its structure in different views is shown in Figure 7.5. The specification details of Pioneer P3dx can be found in [34].
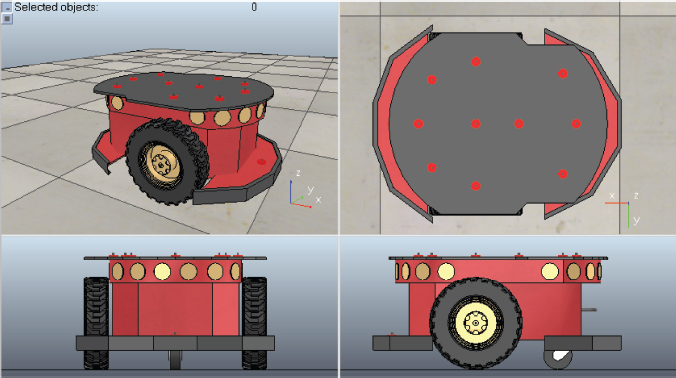
Figure 7.5 The structure of Pioneer P3dx mobile robot in different views.
The Jaya-DE algorithm is programmed using Matlab 2016a to conduct the navigation phase of mobile robots and is interfaced with the simulator. To investigate the navigation strategy of mobile robots, a complex environment with the floor size of 5 × 5 m2 is modeled using V-Rep simulator. The environment is populated with two mobile robots, and eight polygonal shaped obstacles as shown in Figure 7.6. As shown in Figure 7.6, the current location of the robots in the environment is considered to be the initial position and their respective target position is shown in various color codes.
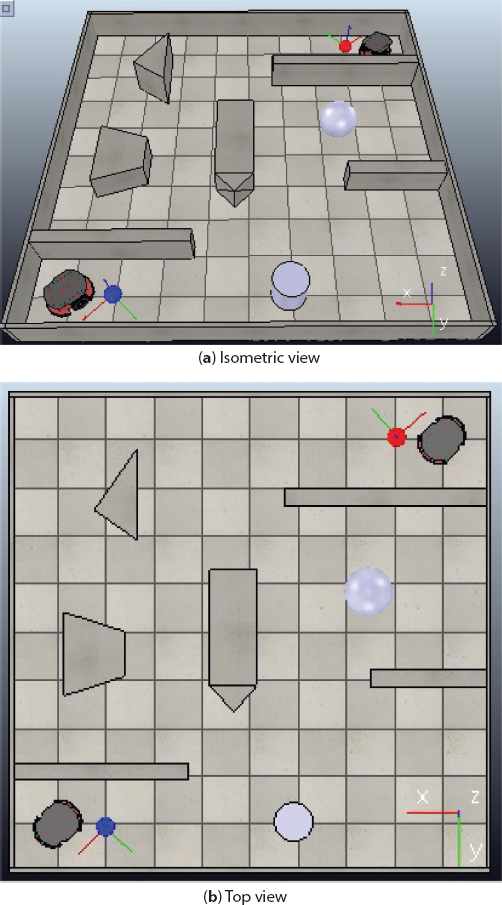
Figure 7.6 Model of the environment with two robots and eight static obstacles.
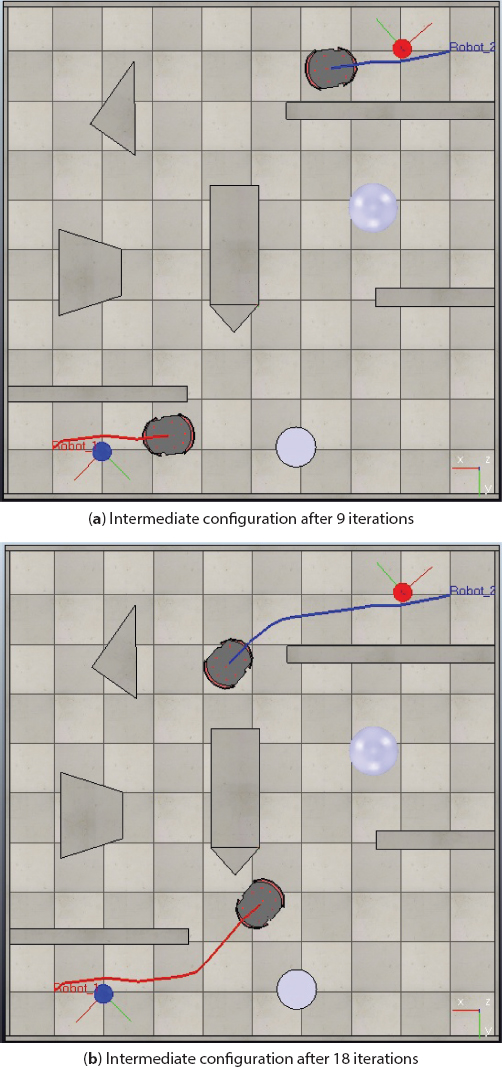
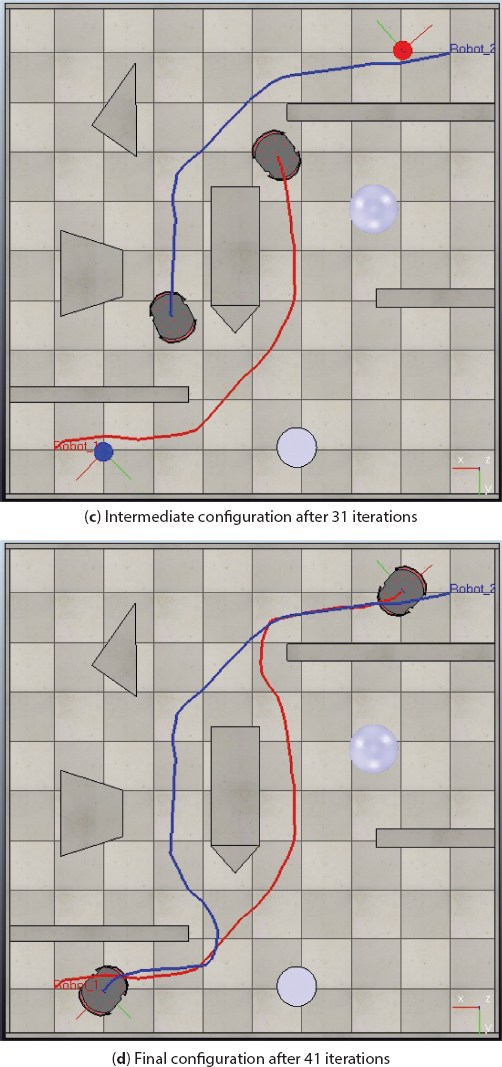
Figure 7.7 MRN employing Jaya-DE.
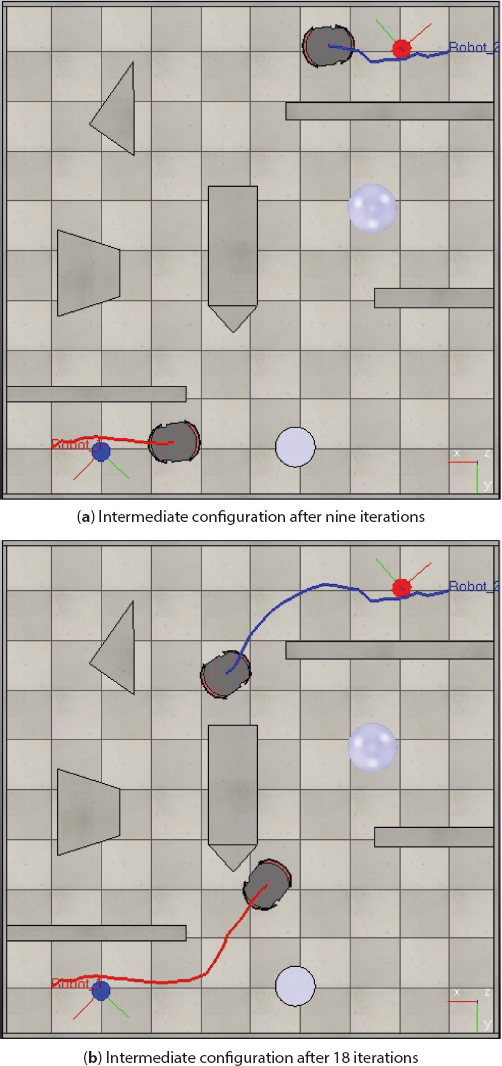
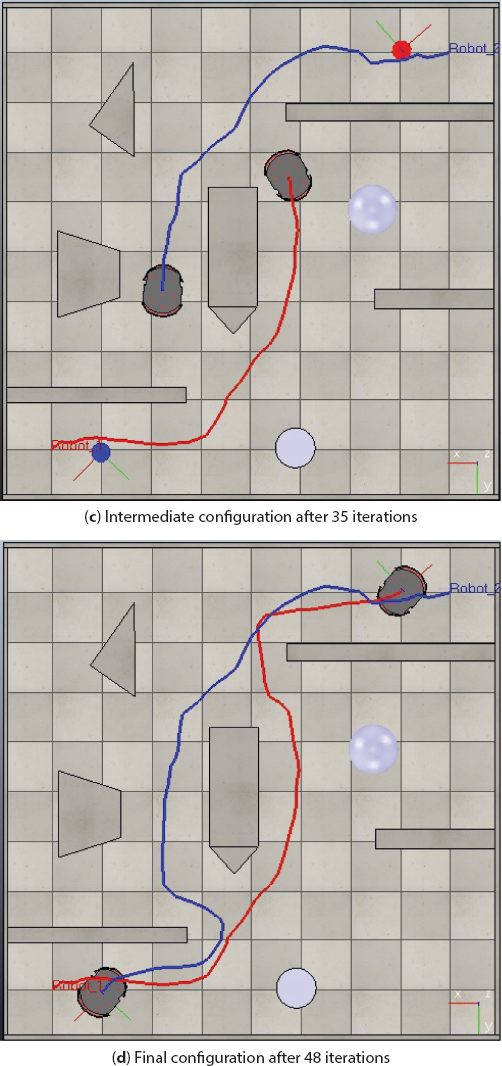
Figure 7.8 MRN employing basic Jaya.
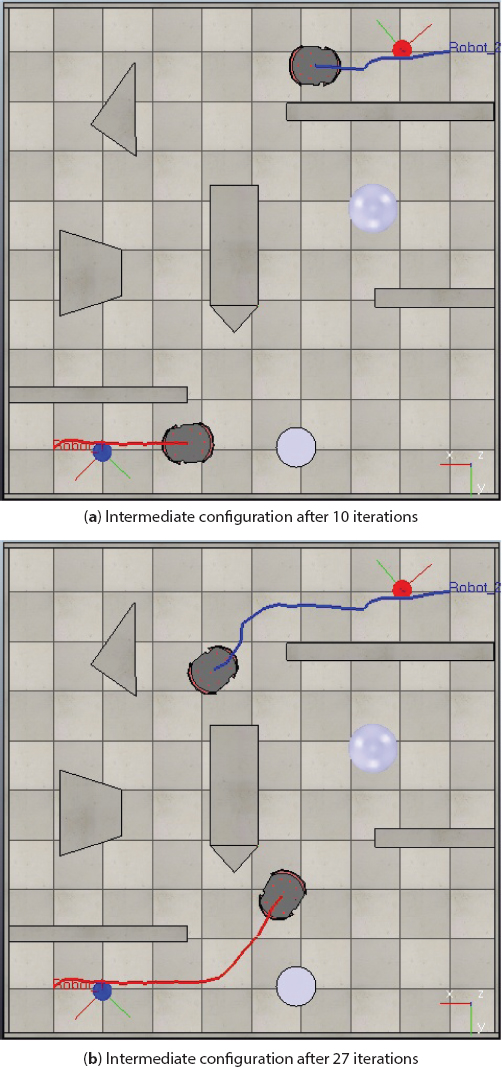
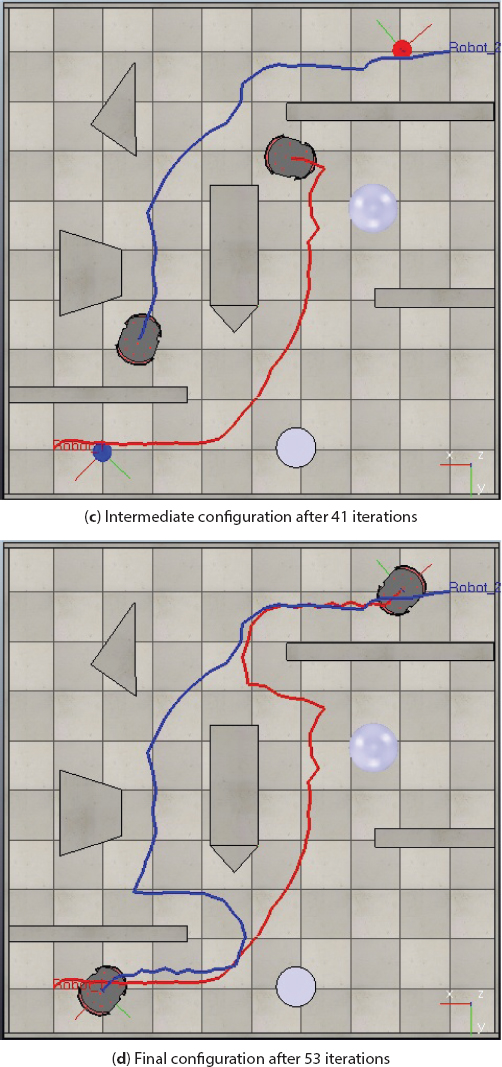
Figure 7.9 MRN employing DE.
The multi-robot navigation employing Jaya-DE is executed in the environment shown in Figure 7.6. The simulation was executed for 30 runs and the best trajectory formed by individual robot from its initial position to the target position out of 30 runs is shown in Figure 7.7.
The simulation outcome confirms the feasibility of the Jaya-DE approach in determining an optimal and safe path for individual robot. To verify the potency of hybrid Jaya-DE it is required to further investigate against basic Jaya algorithm and DE. The simulation outcome for multi-robot navigation employing basic Jaya algorithm and DE are shown in Figures 7.8 and 7.9, respectively.
The trajectory of individual robot obtained from simulation shows the feasibility of basic Jaya algorithm and DE approach, however it is not efficient as compared to Jaya-DE. In order to show the potency of Jaya-DE approach as those of basic Jaya algorithm and DE approach, the performance of each approach need to be compared in terms of some evaluation parameter. In order to compare the performance of Jaya-DE approach, the parameters such as total navigation path travelled (TNPT), aggregate navigation path deviation (ANPD), average unexplored goal distance (AUGD), total execution time, and number of turns are considered.
7.7 Total Navigation Path Deviation (TNPD)
This parameter evaluates the path deviation of individual robot by differentiating the actual navigation path travelled with the ideal shortest navigation path from its source to destination. Let, ![]() is the navigation path travelled by the ith robot in the jth run from its source position to the target position for j = {1, 2, …, k}. The average navigation path traveled (ANPT) by the robot i over k runs of the algorithm can be expressed as
is the navigation path travelled by the ith robot in the jth run from its source position to the target position for j = {1, 2, …, k}. The average navigation path traveled (ANPT) by the robot i over k runs of the algorithm can be expressed as ![]() The average navigation path deviation (ANPD) of ith robot
The average navigation path deviation (ANPD) of ith robot ![]() can be defined using the following expression:
can be defined using the following expression:

where ![]() is the ideal shortest path of ith robot. Thus, the TNPD for n number of robots is given by
is the ideal shortest path of ith robot. Thus, the TNPD for n number of robots is given by ![]()
7.8 Average Unexplored Goal Distance (AUGD)
The distance to be covered by the robot from its present position to its goal position is known as the unexplored goal distance (UGD). If Ci and Gi are the current and target positions of ith robot, then the Euclidean distance between these two positions is the measure for UGD. Thus, AUGD for n robots over k runs of the algorithm can be defined using the following expression:
where ![]() is the unexplored goal distance of ith robot from its current position.
is the unexplored goal distance of ith robot from its current position.
The simulation outcomes by employing the Jaya-DE, basic Jaya and DE approach is compared in terms of ANPT, ANPD, average number of turns, average time, and average iteration. The simulation is conducted for 30 runs and the average of 30 runs for the performance evaluation parameters are presented in Table 7.1.
The results obtained from simulation confirms the potency of Jaya-DE in predicting a near optimal solution for individual robot as those of basic Jaya algorithm and DE for all runs. The results presented in Table 7.1 shows the superiority of the Jaya-DE approach, which attains an improvement of 6–20%, 54–73%, 5–28%, 10–28%, and 10–36% in terms of ANPT, ANPD, number of turns, execution time, and number of iteration, respectively as compared to basic Jaya algorithm, and DE. The performance of Jaya-DE, basic Jaya algorithm and DE approaches is further analyzed in terms of AUGD and presented in Figure 7.10. The Jaya-DE approach attains a zero value of AUGD in lesser number of iteration as those of basic Jaya algorithm and DE approaches.
The analysis of simulation results discussed above shows the superiority of proposed Jaya-DE approach as those of basic Jaya and DE approaches. However, the robustness of the proposed approach need to be verified with increasing complexity by increasing the number of robots and obstacles. In consequence to this, the proposed approach efficiency has been verified in a complex environment as shown in Figure 7.11. The environment is populated with eight mobile robots and eleven stationary obstacles in an area of 15 × 15 m2. The current position of the robots in the environment as shown in Figure 7.11 is considered as the initial position and their respective target position is shown in different color codes.
Table 7.1 Individual robot performance using Jaya-DE, basic Jaya, and DE.
| Robot number | R1 | R2 | |
| Ideal Path Distance (in cm) | 668.37 | 660.19 | |
| ANPT (in cm) | Jaya-DE | 682.18 | 699.61 |
| Basic Jaya | 704.98 | 732.04 | |
| DE | 795.35 | 845.09 | |
| ANPD (in cm) | Jaya-DE | 13.81 | 39.42 |
| Basic Jaya | 36.61 | 71.85 | |
| DE | 127.02 | 184.90 | |
| Average no. of turns | Jaya-DE | 16 | 20 |
| Basic Jaya | 27 | 26 | |
| DE | 36 | 37 | |
| Average Time (in s) | Jaya-DE | 35.95 | 38.73 |
| Basic Jaya | 41.25 | 45.61 | |
| DE | 46.52 | 53.11 | |
| Average Iteration | Jaya-DE | 38 | 41 |
| Basic Jaya | 43 | 48 | |
| DE | 50 | 56 | |
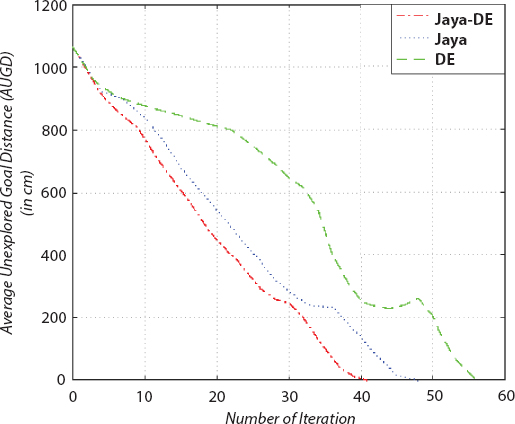
Figure 7.10 AUGD versus number of iteration employing Jaya-DE, basic Jaya algorithm and DE.
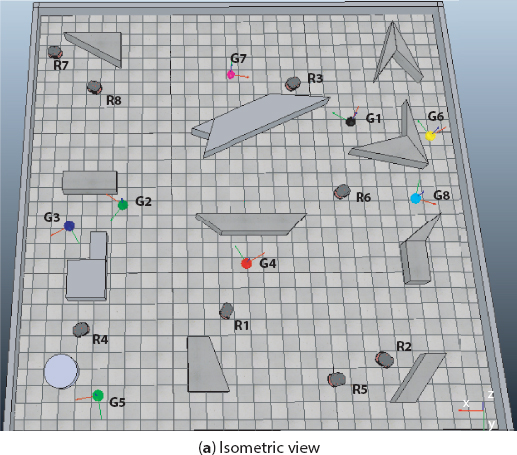
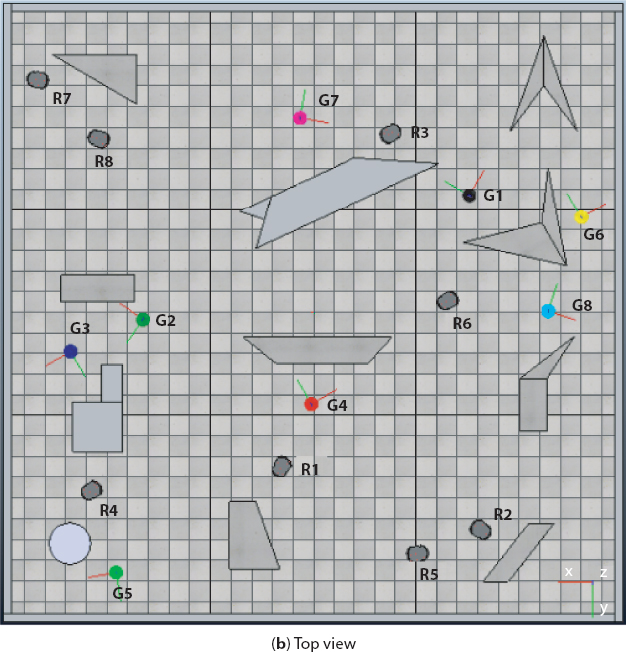
Figure 7.11 Model of the environment with eight robots and 11 static obstacles.
The multi-robot navigation employing Jaya-DE is executed in the environment shown in Figure 7.11. The simulation was executed for 30 runs and the best trajectory formed by individual robot from its initial position to the target position out of 30 runs is shown in Figure 7.12.
The trajectory found by individual robot in simulation employing Jaya-DE seems to be smoother safe and optimal. It took around 70 iterations in every run by all the robots to reach their predefined target position. However, for a fair assessment of the suggested method, it is important to verify its success against the existing state-of-the-art [26] in a similar environment. Keeping all the improvements done by the authors, the proposed IGWO approach performance has been verified against the hybrid Jaya-DE approach in the similar environment.
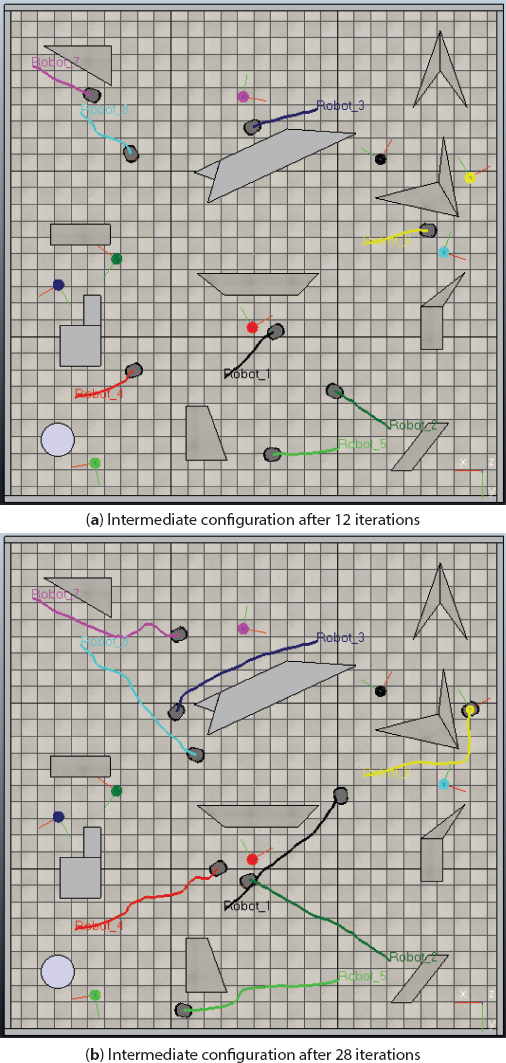
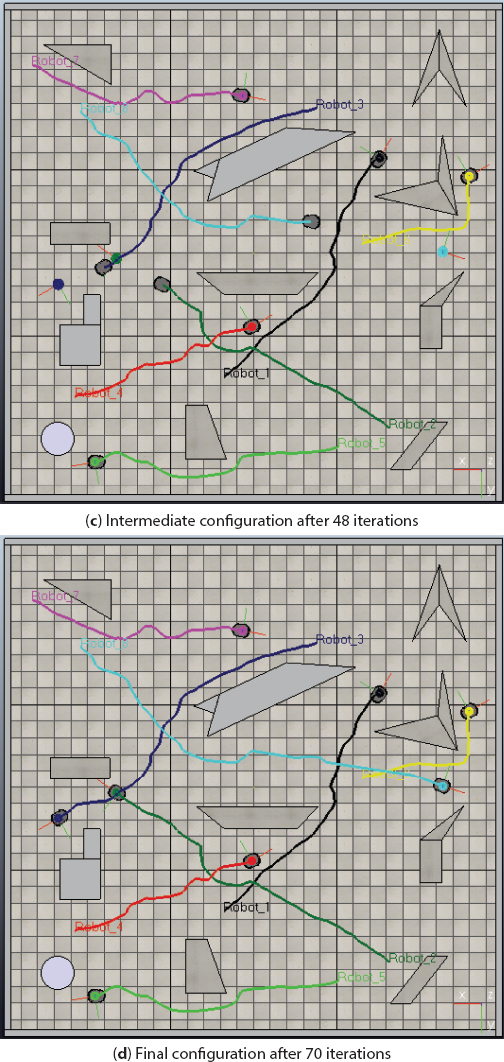
Figure 7.12 MRN employing Jaya-DE with eight robots and 11 obstacles.
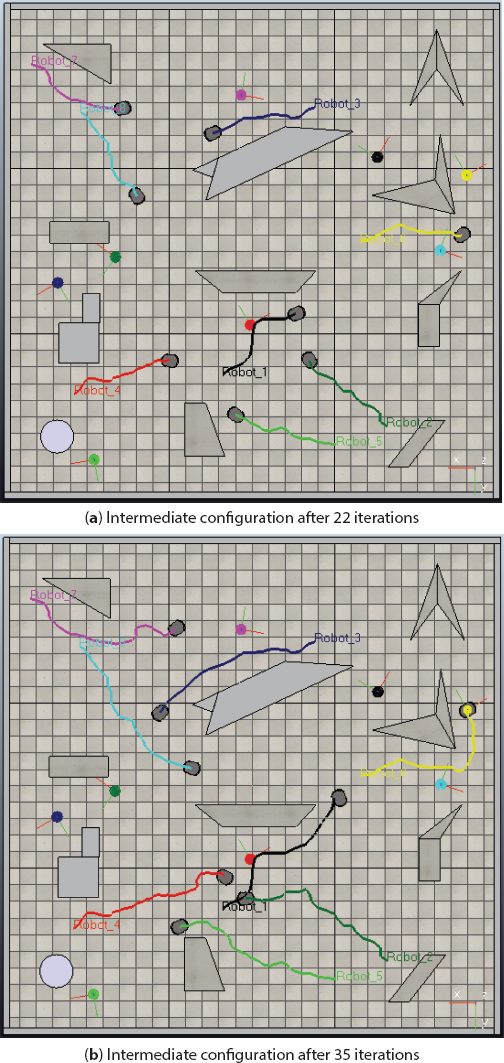
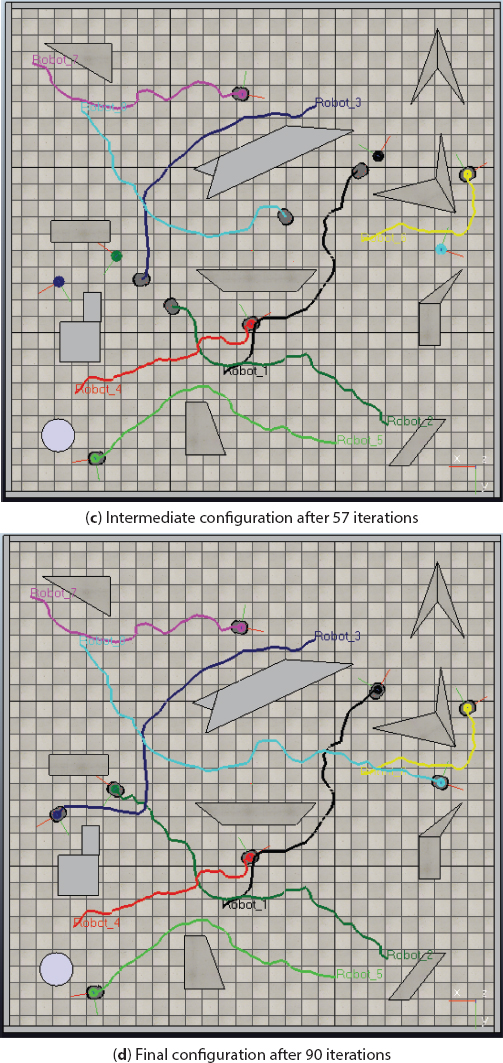
Figure 7.13 MRN planning employing IGWO [26].
Table 7.2 Individual robot performance using Jaya-DE and IGWO [26].
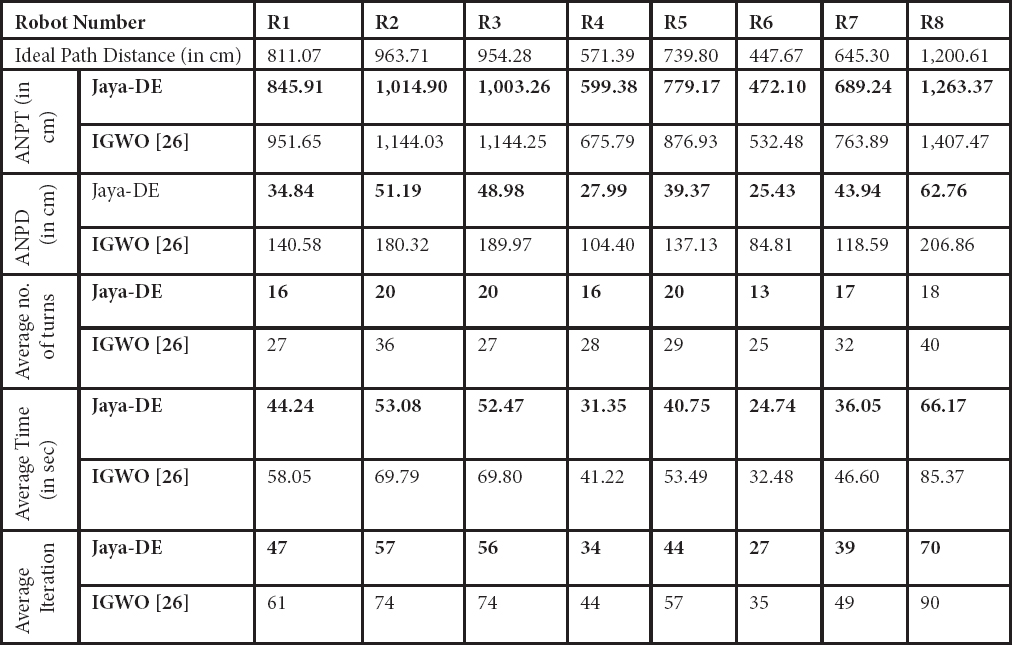
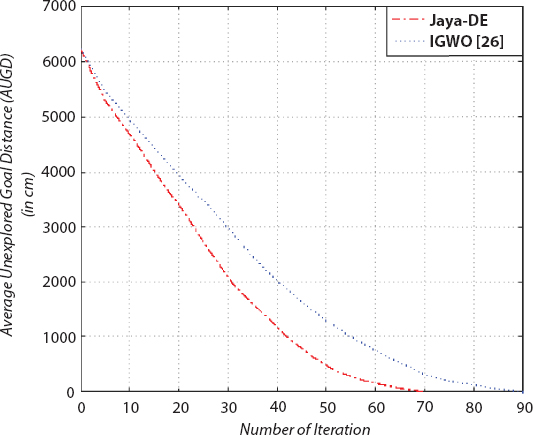
Figure 7.14 AUGD versus number of iteration employing Jaya-DE and IGWO [26].
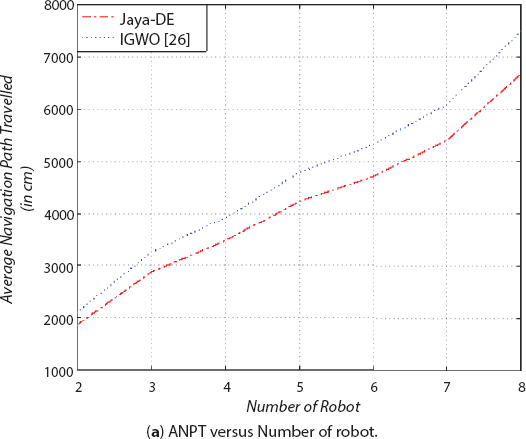
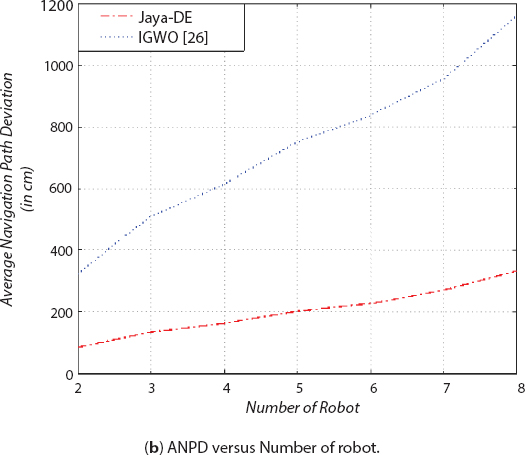
Figure 7.15 Relative performance of Jaya-DE and IGWO [26] in terms of ANPT and ANPD.
The simulation outcome for multi-robot navigation employing IGWO is shown in Figure 7.13.
The trajectory of individual robot obtained from simulation shows the feasibility of the IGWO approach, however it is not efficient as compared to Jaya-DE. In order to show the potency of Jaya-DE approach as those of IGWO approach, the performance of each approach is compared in terms of ANPT, ANPD, number of turns, execution time and number of iteration. The simulation is conducted for 30 runs and the average of 30 runs for the performance evaluation parameters are presented in Table 7.2.
The results obtained from simulation confirms the potency of Jaya-DE in predicting a near optimal solution for individual robot as those of IGWO for all runs. The results presented in Table 7.2 shows the superiority of the Jaya-DE approach, which attains an improvement of 2–10%, 23–238%, 3–58%, 9–21%, and 8–22% in terms of ANPT, ANPD, number of turns, execution time, and number of iteration, respectively as compared to IGWO. The performance of Jaya-DE and IGWO approaches is further studied in terms of AUGD and presented in Figure 7.14. The Jaya-DE approach attains a zero value of AUGD in lesser number of iteration as those of IGWO approach.
The robustness of the Jaya-DE approach is investigated against the IGWO [26] approach by varying the number of robot. The relative performance of the approaches in terms of ANPT and ANPD is presented in Figure 7.15. It can be noted from Figure 7.15 that by varying the number of robots, the ANPT and ANPD by all the robots remains less for Jaya-DE as compared to IGWO [26].
7.9 Conclusion
The current study explored the navigation strategy of multiple mobile robots in static environments employing a novel hybrid meta-heuristic approach. In order to achieve an optimal solution, the navigation planning problem is converted into a single objective optimization problem by considering the influential parameters like path cost, smoothness, and safety of the path. The proposed hybrid Jaya-DE algorithm is employed to plan the navigation path of individual mobile robot by evaluating the objective functions consistently. The feasibility of the approach is verified through simulation using V-Rep simulator employing Pioneer P3dx mobile robot in various static environments. The potency of Jaya-DE algorithm in controlling the motion of mobile robots is compared against basic Jaya and DE. The results obtained are very much promising and provides a good estimation to the optimal solution like those obtained from basic Jaya and DE algorithm. In a more complex environment, the efficiency of Jaya-DE is investigated against the state-of-the-art [26] by changing the quantity of obstacles and robots. The results obtained from simulation confirms the potency of Jaya-DE as those of existing state-of-the-art.
References
1. Shukla, A. and Karki, H., Application of robotics in onshore oil and gas industry—A review Part I. Rob. Auton. Syst., 75, 490–507, 2016.
2. Yan, H., Hua, Q., Wang, Y., Wei, W., Imran, M., Cloud robotics in Smart Manufacturing Environments: Challenges and countermeasures. Comput. Electr. Eng., 63, 56–65, 2017.
3. Ovchinnikov, K., Semakova, A., Matveev, A., Cooperative surveillance of unknown environmental boundaries by multiple nonholonomic robots. Rob. Auton. Syst., 72, 164–180, 2015.
4. Rea, P. and Ottaviano, E., Design and development of an Inspection Robotic System for indoor applications. Robot. Comput.-Integr. Manuf., 49, 143–151, 2018.
5. Prabakaran, V., Elara, M.R., Pathmakumar, T., Nansai, S., Floor cleaning robot with reconfigurable mechanism. Autom. Constr., 91, 155–165, 2018.
6. Duchoň, F., Hubinský, P., Hanzel, J., Babinec, A., Tölgyessy, M., Intelligent vehicles as the robotic applications. Proc. Eng., 48, 105–114, 2012.
7. Kopacek, P., Robots in Production Automation. IFAC Proc. Volumes, 31, 31, 1–6, 1998.
8. Ashrafian, H., Clancy, O., Grover, V., Darzi, A., The evolution of robotic surgery: Surgical and anaesthetic aspects. BJA: Br. J. Anaesth., 119, suppl_1, i72– i84, 2017.
9. Garg, V. and Tiwari, R., A chronological review of the approaches used for multi robot navigation, in: International Conference on Recent Trends in Engineering, Science Technology—(ICRTEST 2016), pp. 1–8, 2016.
10. Latombe, J.C., Robot Motion Planning (Vol. 124), Springer Science & Business Media, Springer, Boston, MA, 2012.
11. Lingelbach, F., Path planning for mobile manipulation using probabilistic cell decomposition, in: 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2004.(IROS 2004). Proceedings, vol. 3, IEEE, pp. 2807– 2812, 2004.
12. Cai, C. and Ferrari, S., Information-driven sensor path planning by approximate cell decomposition. IEEE Trans. Syst., Man. Cybern., B (Cybern.), 39, 3, 672–689, 2009.
13. Dugarjav, B., Lee, S.G., Kim, D., Kim, J.H., Chong, N.Y., Scan matching online cell decomposition for coverage path planning in an unknown environment. Int. J. Precis. Eng. Man., 14, 9, 1551–1558, 2013.
14. Lee, M.C. and Park, M.G., Artificial potential field based path planning for mobile robots using a virtual obstacle concept, in: 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, 2003. AIM 2003. Proceedings, vol. 2, IEEE, pp. 735–740, 2003.
15. Cosío, F.A. and Castañeda, M.P., Autonomous robot navigation using adaptive potential fields. Math. Comput. Model., 40, 9–10, 1141–1156, 2004.
16. Bhattacharya, P. and Gavrilova, M.L., Roadmap-based path planning-using the voronoi diagram for a clearance-based shortest path. IEEE Robot. Autom. Mag., 15, 2, 58–66, 2008.
17. Koren, Y. and Borenstein, J., Potential field methods and their inherent limitations for mobile robot navigation, in: IEEE International Conference on Robotics and Automation, Proceedings, IEEE, pp. 1398–1404, 1991.
18. Dewangan, R.K., Shukla, A., Godfrey, W.W., A solution for priority-based multi-robot path planning problem with obstacles using ant lion optimization. Mod. Phys. Lett. B, 34, 13, 2050137, 2020.
19. Tang, B., Xiang, K., Pang, M., Zhanxia, Z., Multi-robot path planning using an improved self-adaptive particle swarm optimization. Int. J. Adv. Robot. Syst., 17, 5, 1729881420936154, 2020.
20. Gul, F., Rahiman, W., Alhady, S.N., Ali, A., Mir, I., Jalil, A., Meta-heuristic approach for solving multi-objective path planning for autonomous guided robot using PSO–GWO optimization algorithm with evolutionary programming. J. Ambient Intell. Humaniz. Comput., 12, 7873–7890, 2021. https://doi.org/10.1007/s12652-020-02514-w
21. Zhang, D., You, X., Liu, S., Pan, H., Dynamic multi-role adaptive collaborative ant colony optimization for robot path planning. IEEE Access, 8, 129958– 129974, 2020.
22. Sharma, S., Shukla, A., Tiwari, R., Multi robot area exploration using nature inspired algorithm. Biol. Inspired Cogn. Archit., 18, 80–94, 2016.
23. Bakdi, A., Hentout, A., Boutami, H., Maoudj, A., Hachour, O., and Bouzouia, B., Optimal path planning and execution for mobile robots using genetic algorithm and adaptive fuzzy-logic control. Rob. Auton. Syst., 89, 95–109, 2017.
24. Albina, K. and Lee, S.G., Hybrid stochastic exploration using grey wolf optimizer and coordinated multi-robot exploration algorithms. IEEE Access, 7, 14246–14255, 2019.
25. Ghosh, S., Panigrahi, P.K., Parhi, D.R., Analysis of FPA and BA meta-heuristic controllers for optimal path planning of mobile robot in cluttered environment. IET Sci. Meas. Technol., 11, 7, 817–828, 2017.
26. Toufan, N. and Niknafs, A., Robot path planning based on laser range finder and novel objective functions in grey wolf optimizer. SN Appl. Sci., 2, 8, 1–19, 2020.
27. Faridi, A.Q., Sharma, S., Shukla, A., Tiwari, R., Dhar, J., Multi-robot multi-target dynamic path planning using artificial bee colony and evolutionary programming in unknown environment. Intell. Serv. Robot., 11, 2, 171–186, 2018.
28. Rao, D.C., Kabat, M.R., Das, P.K., Jena, P.K., Cooperative navigation planning of multiple mobile robots using improved krill herd. Arab. J. Sci. Eng., 43, 12, 7869–7891, 2018.
29. Rao, D.C. and Kabat, M.R., A trust based navigation control for multi- robot to avoid deadlock in a static environment using improved Krill Herd. In International Conference on Inventive Research in Computing Applications (ICIRCA), IEEE, pp. 810–817, 2018.
30. Rao, D.C., Kabat, M.R., Das, P.K., Jena, P.K., Hybrid IWD-DE: a novel approach to model cooperative navigation planning for multi-robot in unknown dynamic environment. J. Bionic Eng., 16, 2, 235–252, 2019.
31. Rao, R., Jaya: A simple and new optimization algorithm for solving constrained and unconstrained optimization problems. Int. J. Ind. Eng. Comput., 7, 1, 19–34, 2016.
32. Price, K.V., Storn, R.M., Lampinen, J.A., The differential evolution algorithm. Differential evolution: a practical approach to global optimization, pp. 37–134, Springer, Berlin, Heidelberg, 2005.
33. Rohmer, E., Singh, S.P., Freese, M., V-REP: A versatile and scalable robot simulation framework. In Intelligent Robots and Systems (IROS), 2013 IEEE/ RSJ International Conference on, IEEE, pp. 1321–1326, 2013.
34. Adept Technology, Inc Mobile robots, “Pioneer p3-dx specifications.” https://www.generationrobots.com/media/Pioneer3DX-P3DX-RevA.pdf. Accessed: 2020-12-28.
Email: [email protected]