
17
Managing charging of electric vehicles in electricity transmission and distribution networks
Abstract
This chapter discusses the problem of managing the charging process of a large fleet of electric vehicles (EVs). First, the attention will be focused on the potential limitations in the quality of service coming from the management of EVs at conventional households, according to traditional fixed-rate charging strategies. Then, smart variable-rate energy management strategies will be introduced. As shown by different analyses, these smart strategies can allow a significant improvement in the quality of service, becoming an important driver to move from the current distribution grid to a smart grid capable of communicating in real time with smart chargers.
Keywords
Electric vehicles; Energy dispatching; Smart grid; Smart meters17.1. Introduction
This chapter will discuss the problem of managing the charging process of a large fleet of electric vehicles (EVs), which are expected to diffuse more and more in the next few years owing to their benefits in terms of CO2 emissions, energy and oil consumption reduction compared with traditional internal combustion engine vehicles. In fact, besides all these important advantages, a large penetration of EVs could also have deleterious effects from the distribution grid point of view, causing a significant additional load that can potentially cause overload conditions and service interruptions if the charging processes of EVs connected to the grid are not properly managed.
The first part of this chapter will focus on the potential problems and limitations in the quality of service coming from the management of EVs at conventional households, according to traditional fixed-rate (FR) charging strategies that consist in starting the charging process of each EV just when it is plugged in and by using a fixed charging rate. Then, the concept of smart variable-rate (VR) energy management strategies will be introduced, according to which the charging processes of EVs connected to the grid are scheduled on the basis of advanced priority criteria and performed by dynamically varying the charging rate to the actual conditions of both the grid load and the EV battery. The results of different analyses will show that the significant improvement of the quality of service potentially guaranteed by smart VR charging strategies can be an important driver to move from the current passive distribution grid to a smart grid capable of communicating in real time with smart chargers equipped with advanced metering functionalities. Finally, discussion will focus on how the EV charging problem can be analyzed for educational purposes in order to teach some very important concepts about analysis methodology and typical trade-offs characterizing engineering problems.
17.2. EV charging: issues and opportunities for the distribution grid
EVs guarantee some remarkable advantages compared with gasoline-fueled vehicles, by considerably reducing CO2 emissions, energy, and oil consumption. For example, referring to the U.S. scenario, some analyses have shown that the use of EVs powered by existing power plants could reduce energy consumption by 30%, CO2 emissions by 27%, and imported oil by 52% (Ipakchi & Albuyeh, 2009; Pratt et al., 2010).
But these benefits could be even more significant by exploiting the possibility of supplying EVs by means of renewable sources. In fact, some studies indicate that if half of the vehicle fleet were powered by clean electricity, the total vehicle emissions in the United States would be reduced by 62% by 2030 (Becker, 2009).
Moreover, EVs offer the further opportunity of exploiting their batteries as a further grid storage reserve (vehicle-to-grid, V2G capability) to be used in case of blackouts or to perform ancillary services such as voltage and frequency stabilization.
Just to have a quantitative vision, let us assume to have 100 vehicles parked with an average energy capacity of 20 KWh and a residual battery state of charge of 30% after the daily usage. If just half of the vehicle fleet was available to perform vehicle-to-grid service, the total available energy globally would be 300 KWh, which means, for example, to have a further power reserve for the grid of more than 1 MW for a 15 min time window, offering a significant addition to peak power capacity of the grid. Moreover, the energy reserve would be suitable for grid regulation due to the possibility of a real-time response to power commands regulated by utilities.
All these fundamental aspects place EVs at the center of international policies for environmental protection, which are aimed at guaranteeing an ever-increasing popularity of these vehicles in the coming years.
According to recent market analyses, sales of plug-in EVs (PEVs) will grow at a compound annual growth rate of nearly 40% reaching 3.8 million units in 2020 (Pike Research, 2012).
Typically, PEVs require 0.2–0.3 kWh for a mile of driving and are characterized by battery capacity values in the range of 10–50 kWh. Three different levels are available to perform EV charging.
Level 1 charging is performed by means of typical AC outlets at 120 V with a maximum current of 16 A, adding about 2–5 miles of range per hour of charging.
Level 2 charging requires the installation of a dedicated home or public AC charging equipment supplying up to 80 A at 240 V, adding 10–20 miles of range per hour of charging.
Level 3 fast charging is carried out by means of proper DC charging stations capable of supplying more than 60 A at 480 V in order to add 60–80 miles of range in 20 min of charging.
Beyond all the advantages previously discussed, a widespread adoption of EVs to be charged in reasonable time could cause a significant additional demand for electric power, which may add a significant load to the distribution grid, especially because of the high probability of multiple simultaneous charging requests concentrated in specific time periods of the day, i.e., during working hours or at night.
For example, the Joint Research Centre of the European Commission has shown that, in the province of Milan (Italy), the maximum electric power request would increase by about 30% if EVs should reach 25% of the vehicle fleet (Perujo & Ciuffo, 2009).
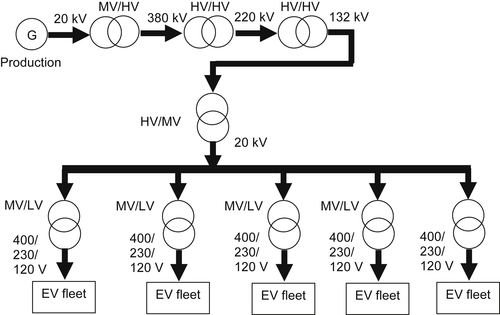
If not properly managed, the occurrence of several contemporary charging requests in this kind of situation could cause power quality degradation on the medium voltage (MV) distribution grid (Clement-Nyns, Haesen, & Driesen, 2010; Lopes, Soares, & Almeida, 2011; Mobile Energy Resources in Grid of Electricity (MERGE) Project Report, 2010; Taylor, Maitra, Alexander, Brooks, & Duvall, 2009) and local overload conditions for medium voltage–low voltage (MV/LV) substation transformers in a typical distribution grid (Figure 17.1).
Recent studies related to a typical MV distribution grid have indeed demonstrated that the line losses caused by the absence of any charging regulation mechanism could lead to exceeding the lower limit allowed for the line voltage even for an EV penetration level higher than 10% (Lopes et al., 2011).
These critical conditions on the distribution grid might lead to interruptions, degradation of the quality of service, and damage to utility and customer equipment (Kintner-Meyer, Nguyen, Jin, Balducci, & Secrest, 2007; Perujo & Ciuffo, 2009).
To avoid all these problems, it is fundamental to have the possibility of scheduling the charging processes of EVs connected to the grid in order to reduce the peak load (Lopes et al., 2011; Grid for Vehicle (G4V) Project Report, 2010; Kulshrestha, Wang, Chow, & Lukic, 2009). This makes mandatory the development of innovative smart charging management strategies for EVs.
However, some important issues are obstacles to implementation of these kinds of strategies, because both existing electrical distribution grids and charging systems are not designed to interact with each other.
As a consequence, currently the only option is to start the charging process just when the EV is plugged in (or, at most, with a delay fixed by the user), without any possibility of dynamically adjusting the charging parameters to the actual grid conditions aiming to avoid overloads.
To overcome these limitations allowing the implementation of smart energy management strategies, it is then crucial to develop both smart grid infrastructures and advanced charging systems capable of reciprocal interaction. These fundamental issues, together with the concrete opportunity of exploiting more effectively the renewable resources and of significantly reducing global energy consumption, have made the implementation of smart grids a crucial priority for governments, scientific communities, and industry.
In order to define convenient smart energy management strategies for EVs, it is necessary to consider two possible scenarios. The first one is the fast-charging scenario, in which there is the need to provide customers with ad hoc high-power charging stations allowing very fast battery recharging, especially in particular situations such as long trips. The main purpose in these situations is to perform the battery charging process as soon as possible in the fastest way, with charging times that reasonably can be on the order of 10 min (or even less if new promising battery technologies will be further developed). Evidently, in this scenario there is practically no room to decide the charging rate, which has to be as high as possible.
On the other hand, it is worth pointing out that typical daily car usage generally does not require really long trips. This leads to a second scenario in which the fast charging is actually not strictly needed, because customers can have several hours at their disposal to charge their EVs when they arrive home or during work hours in which their vehicles are parked.
Notwithstanding the slower charging power that can be used owing to the increased time available to perform a full battery refilling, it is calculated that also in these situations the presence of multiple charging requests in a relatively small time window can have a remarkable deleterious impact on the grid load. However, in these cases the main scope is to complete the charging process just by the expected departure time defined by the user, and not as fast as possible as in the fast-charging scenario previously mentioned. Clearly, this leaves more room for the possibility of performing some form of energy dispatching strategy aimed to effectively avoid grid overloads and to improve the quality of service.
As it will be discussed in the following section, a very promising approach to improve the system performances is to use strategies in which the charging power for each EV battery connected to the grid is dynamically varied and adapted to the grid load conditions at that specific moment in order to exploit the full grid capability and to achieve a better satisfaction of user requests.
Before introducing smart management strategies, the next section will discuss in more detail the limitations arising from existing grids and chargers, and the resulting charging approaches.
17.3. Impact of FR charging strategies on the distribution grid
Currently, both on-board and off-board EV chargers are typically designed to power batteries according to constraints defined by battery management systems (BMS), without taking into account grid load conditions. In this scenario, the charging process of EVs connected to the grid are then not coordinated, and they are performed asynchronously and at a given fixed charging rate defined by the BMS (sometimes also according to user-defined constraints).
In the absence of smart metering solutions, this means that a local concentration of multiple charging requests can cause overloads and blackouts, especially for transformers of MV/LV substations (Figure 17.1).
It can be easily understood that a basic countermeasure to avoid these problems can be the installation of ad hoc smart meters communicating with the grid, capable of avoiding starting the charging process of an EV when plugged in if the grid baseload is near to the maximum power allowed by the grid. However, this sole countermeasure can be insufficient to guarantee suitable system performance, resulting in a poor exploitation of grid capabilities.
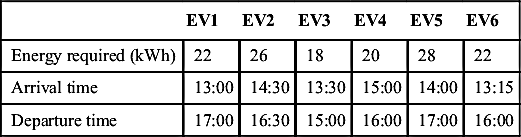
To highlight the problem, a simple small-scale example is presented in which a local grid node with a maximum power capability of 50 kW is assumed to host six EVs to be charged during 4 h from 1 p.m. to 5 p.m. These EVs are assumed to be characterized by the profiles summarized in Table 17.1, which report the energy required (selected according to typical EV battery capacity values), the arrival time into the system when the EV is plugged in, and the expected departure time from the system.
A baseload of about 17 kW is assumed by scaling coherently a typical load daily profile of a real grid node (Benini et al., 2011).
The analysis of the system evolution is performed using ad hoc Matlab-based tools able to simulate the EV charging process by considering also typical constant current–constant voltage (CC/CV) battery charging algorithms used for lithium ion batteries typically used in EVs.
First, the charging processes of the six EVs are managed by means of a FR approach in which:
• the charging process of each EV starts when it is plugged in, provided that the grid is capable of allocating the power required by the vehicle battery, otherwise the charging request is rejected to avoid grid overload. Thus, the priority of each EV is decided just according to its arrival time into the system;
• the charging process of each EV is performed at a FR, corresponding to the maximum charging rate admissible for the vehicle battery (assumed to be 1C to fully charge the battery in about 1 h).
This does not limit the generality of the analysis, which can be clearly extended also to other cases in which the charging process starts with a fixed delay programmable by the user and even by using larger charging rates to reduce the charging time.
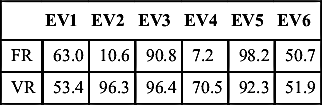
To have a quantitative vision of simulation results, a satisfaction degree (SD) is introduced to measure the satisfaction of the different users at the end of the charging process in terms of state of charge. It is calculated (in %) as SD = (ES/ER0)·100, ER0 being the total energy required by the user battery (in kWh) before starting the charging process, and ES is the total energy allocated to the EV (in kWh) at the end of the process.
Table 17.2 reports the simulation results related to the SD of the users. It appears that when the FR approach is used, two EVs are almost fully charged (SD > 90%), two EVs show a modest charge at the departure time (SD > 50%), and the remaining two EVs leave the system practically discharged, with an SD of about 10%.
These results lead to a mean satisfaction degree (MSD, calculated as the average value of the SD of all the users) of 53.4%.
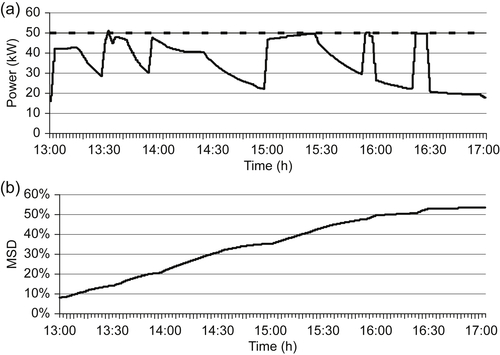
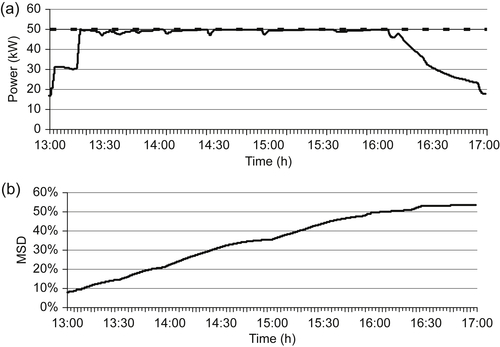
This poor system performance is caused by a significant underexploitation of the grid power capability due to the use of fixed charging rates. This is shown in Figure 17.2, which depicts the trend of both the grid load and the MSD during the time window considered in the analysis. From the plot in Figure 17.2(a), it appears that the grid load is often lower than the maximum power that can be potentially supplied by the grid. This is obviously not good news, because it means that a larger MSD could have been achieved if the EV charging process were managed according to some more flexible management strategy capable of adapting the charging rate of each battery to the actual load conditions in order to fully exploit the grid power capability.
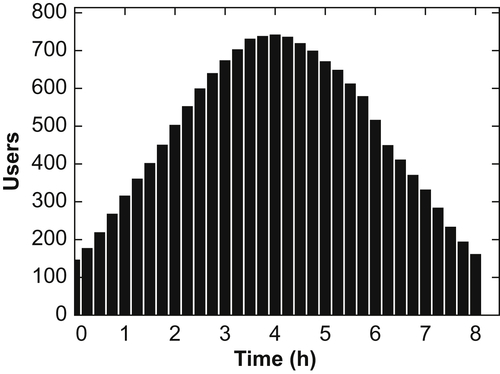
To further analyze the impact of using the FR strategy, a larger-scale scenario is also considered by simulating the evolution of 100 LV nodes of the grid in which each MV/LV substation transformer is assumed to be able to supply 300 kW to EVs (according to a real case situation in which MV/LV transformers are sized to provide a maximum power of 500 kW (Benini et al., 2011) in the presence of a baseload of 200 kW). Simulations are carried out by considering an 8-h time period and by assuming the Gaussian distribution of Figure 17.3 for the EVs present in the system.
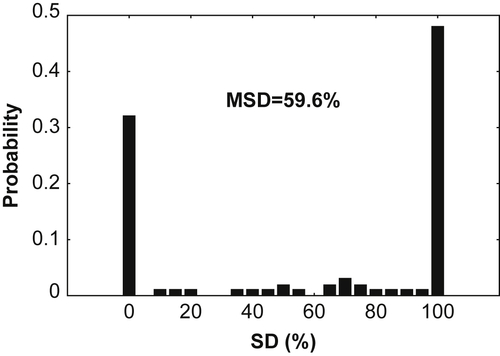
Simulation results are shown in Figure 17.4, in which it appears that an MSD of 59.6% is obtained in this case by using the FR approach.
The next section will discuss how to implement smart charging strategies that increase user satisfaction by exploiting the full power capability of the grid.
17.4. Smart VR charging strategies: a key paradigm for electric transportation
To overcome limitations arising from the previously discussed energy management strategies, development of the current grid architecture is needed to make it a smart grid architecture capable of communicating with chargers and reacting in real time in order to (Amoroso & Cappuccino, 2011a, 2011b, 2012):
• schedule the charging processes of EVs plugged in according to priority policies that are not based just on the arrival time of the EV used into the system but that allow actually understanding which EVs have more urgency to be charged;
• dynamically adapt the charging rate of the EVs according to the current grid load conditions to exploit the full grid power capability in order to avoid overload conditions.
It is worth pointing out that the definition of the most suitable scheduling rule to set the EV priority is clearly not univocal, because it depends on the particular system performance to be optimized and on the specific strategy used.
One of the most important parameters to decide the urgency of charging an EV at a given time is clearly the time available before the user drive-off in order to complete the charging process in time. However, in order to define a coherent priority rule, it is necessary to take into account not only the time available but also the energy required by the EV at that particular time.
So, a first priority rule for a generic i-th EV in the system (PRi (t)) at a given time instant t can be defined as follows:
 (17.1)
(17.1)
• ERi(t) is the energy still required by the EV to complete the charging process;
• TAVi(t) is the time still available to complete the charging process before the user departure;
• PAV(t) is the maximum power available from the grid avoiding overloads.
In the following, the above priority rule will be considered. Obviously this does not limit the generality of the analysis that can be extended also to possible advanced scenarios, in which, for example, the priority can be decided also on the basis of variable tariffs by means of which users can decide to pay an overcharge to have their EVs charged more quickly, and/or on the basis of some penalties for the utility if the user is not satisfied.
Once users are ordered in decreasing priority, the second fundamental step of a smart charging strategy is the definition of a convenient charging rate for each EV connected to the grid. It is not the aim of this section to discuss the best rule to set the charging rate, which is clearly not univocal. Instead, the analysis is carried out by considering the basic charging rate assignment function for the generic i-th user (CRi), which consists in splitting the energy still required by the user over the time period available before his departure, according to the following formulation:
 (17.2)
(17.2)
Obviously, the value selected for CRi cannot exceed absolute maximum ratings coming from physical constraints, which typically result in minimum (CRiMIN) and a maximum (CRiMAX) admissible values for the charging rate that have to be taken into account. Thus, the value of the charging rate calculated according to Eqn (17.2) may not actually be used in some situations.
Other very important points to be considered are both the time available to complete the charge and the energy required by the battery of each EV change during the charging process. It is then essential to recalculate both the priority and the charging rate of each user more frequently, by dividing the entire time window related to the process into time slots of duration Δt in which the user priorities and charging rate are updated.
As a consequence of these considerations, the general flux diagram of the smart strategy defined above is that depicted in Figure 17.5. The diagram shows that, for each time slot of duration Δt, the queue of all EVs connected to the grid is sorted according to the priority rule, Eqn (17.1), and, consequently, the charging process of the users is performed with a charging rate defined according to Eqn (17.2), provided that the calculated value of the charging rate does not exceed the battery absolute maximum ratings and there is still power actually available for the user.
To show the advantages of the above-described smart VR charging strategy, the same systems considered in the previous section are analyzed.
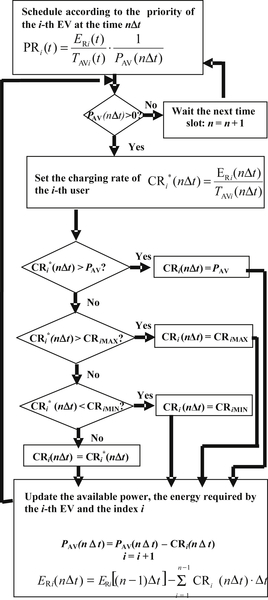
Table 17.2 reports the results related to the SD of the users in the small-scale scenario in which six EVs are connected to a 50 kW grid node. From data in the table it appears that the VR strategy allows a significant improvement in user satisfaction, leading to an MSD of 76.8%. Compared to the MSD of 53.4% obtained when using the FR approach, the smart VR charging strategy allows the MSD of users to be improved by about 44%.
This significant performance enhancement results from the optimal exploitation of the grid power capability, as shown in Figure 17.6, which reports the evolution of both the grid load (Figure 17.6(a)) and the MSD (Figure 17.6(b)). In fact, as it appears from Figure 17.6(a), the power allocated to loads is almost the maximum available from the grid for a large part of the entire time window analyzed.
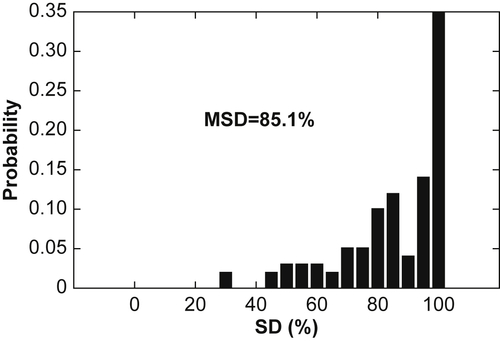
The impact of using the VR approach on the system performance is also analyzed for the larger-scale scenario, characterized by 100 LV nodes capable of supplying 300 kW in the presence of a number of EVs characterized by the Gaussian distribution of Figure 17.3. The simulation results related to this case are shown in Figure 17.7, which depicts the statistical distribution of the SD of users in this case. It appears that using the VR charging strategy allows an MSD of 85.1% to be reached, with a 43% improvement of the MSD with respect to that obtained by using the FR approach (MSD = 59.6% according to Figure 17.4).
The strong performance enhancement highlighted by the results of the presented analysis is obviously not for free. As a matter of fact, the implementation of VR strategies implies a remarkable trade-off between user satisfaction and system complexity, because the update of both the priority and charging rate assignment functions has to be performed as frequently as possible in order to adapt these important parameters to the actual conditions of both the grid load and the batteries connected to the system.
According to the formulation of VR strategy previously discussed, this will require a “continuous” exchange of information between the EVs plugged in and one or more grid management systems about battery conditions (state of charge, time available for charging, absolute maximum ratings for charging power, etc.) and grid load conditions.
Just to have a quantitative idea about the increase of the system complexity resulting from the implementation of smart charging strategies, it is worth pointing out that the times required by the computer used for the simulations carried out were 0.6 and 3.7 s for the large-scale scenario when using the FR and the VR strategy, respectively.
This system complexity increase will require an important effort for utilities and battery/charger manufacturers in order to upgrade the grid architecture and improve chargers and BMS by implementing advanced smart metering and communication capabilities. For these reasons, the transportation electrification is undoubtedly considered one of the main drivers for the smart grid of the future.
17.5. Smart grid for vehicle charging: a case study
Besides the very important technical problems discussed in the previous sections that involve both industry and research communities nowadays, the smart management of EVs connected to the grid is also a very suitable topic to introduce students to typical aspects of engineering. This is the basic idea behind the educational module “Coping with the Emerging Energy Demand for Charging Plug-in Electric Vehicles,” which has been awarded in the context “IEEE Real World Engineering Projects” (Cappuccino & Amoroso, 2011).
The module is based on an ad hoc Matlab-based tool that allows defining and comparing different charging strategies for EVs in terms of user SD, algorithm complexity (measured by means of the simulation time), and system requirements in terms of communication capabilities (quantified by measuring the communication signals exchanged by the grid and each EV to perform the charging process according to the selected energy dispatching strategy).
As discussed by the project's authors, the development and simulation of smart energy management strategies for EVs can allow engineering students to deal with some very important aspects, such as defining optimal scheduling strategies to assign shared resources to satisfy multiple contemporary requests aiming to optimize given objective functions.
Moreover, this experience is very useful to teach the importance of formalizing the problem from a mathematical point of view by using numbers to quantify system performance, such as user priority and SD, as well as to teach the importance of performing a time discretization of a continuous-time system in order to periodically update the priority and charging rate assignment functions.
Finally, coping with EV charging management helps to make students conscious of the trade-offs characterizing typical engineering problems in the real life, because they can appreciate how the increase of user SD and grid potentiality exploitation guaranteed by sophisticated charging strategies is unavoidably accompanied by the increase of the algorithm and system complexity.
17.6. Conclusions
As discussed in this chapter, a large penetration of EVs will require the development of smart energy management strategies to supervise multiple contemporary battery charging requests that could potentially cause grid overloads and low quality of service.
The results of the analyses carried out for both small- and large-scale scenarios clearly highlight that the use of smart VR charging strategies can allow a significant increase of about 30–45% in user satisfaction with respect to traditional FR charging approaches in which battery charging processes are performed just when the EVs are plugged in and at a constant charging rate.
Compared with FR strategies, these smart VR approaches are based on the frequent update of both the scheduling priority and the charging rate of the users, aiming to adapt them to the overall grid load in that particular moment.
For these reasons, the EV charging challenge is one of the most important drivers to move from the current passive grid structure to a smart grid architecture with advanced metering features and communication capabilities in order to interact in real time with smart chargers and to effectively perform the smart energy management strategies described.
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.