
Appendix C. Some Vector And Tensor Operations
TABLES 5.2–5.5 gave details of the most frequently used vector operations (gradient and Laplacian of a scalar, divergence and curl of a vector) in rectangular, cylindrical, and spherical coordinates. Here, we give a few more definitions for rectangular Cartesian coordinates, sufficient for the needs of this book.1
1 The reader who needs to learn more about vector and tensor operations, including those in cylindrical and spherical coordinate systems, is referred to Appendix A of the excellent text: R.B. Bird, W.E. Stewart, and E.N. Lightfoot, Transport Phenomena, 2nd ed., Wiley & Sons, New York (2002).
Dyadic Product of Two Vectors
The dyadic product uv of two vectors u and v is a tensor, such that it and its transpose (uv)T are defined by:

If u is the nabla operator, we then have the following special dyadic products:

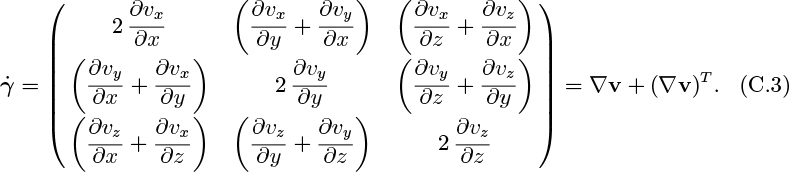
Such products are very useful in summarizing, for example, the strain-rate tensor that appears in Section 5.7:
The “Divergence” of a Tensor
Consider first the tensor:

The dot product of the nabla operator with a symmetric tensor, ∇· τ (in which τyx = τxy, etc.), is a vector with the following components in each of the three coordinate directions:

To obtain the first of these relations, it is as though we had considered the first row of the tensor to be a vector, and we had then taken its divergence, etc. The form ∇· τ enables us to summarize the three momentum balances in compact vector form for the case of variable viscosity, as in Example 5.9.
The “Laplacian” of a Vector
The product of the operator ∇2 with a vector v, as in ∇2v, is a vector with the following components:
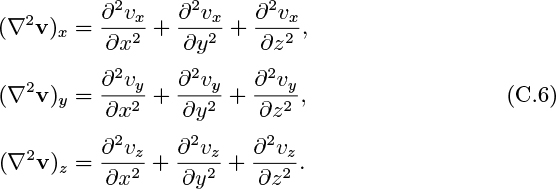
That is, we obtain three Laplacians of the individual components vx, vy, and vz, one for each coordinate direction. As seen in Section 5.7, this enables a compact representation of the constant-viscosity terms in the Navier-Stokes equations.