Now that we have every part working and tested, it should be easy to put it together, right? Wrong.
Even though reading constant stream of packets from the dongle works with LEDs, it’s a different case for turning the servos. LEDs, being semiconductors, take negligible time to change state. Servos move things that have mass, and are very slow compared to LEDs.
The previous attention routine assumed it will be called at suitable intervals. Here, we have to make an attention-reading function that can both be called very often and survive slight pauses.
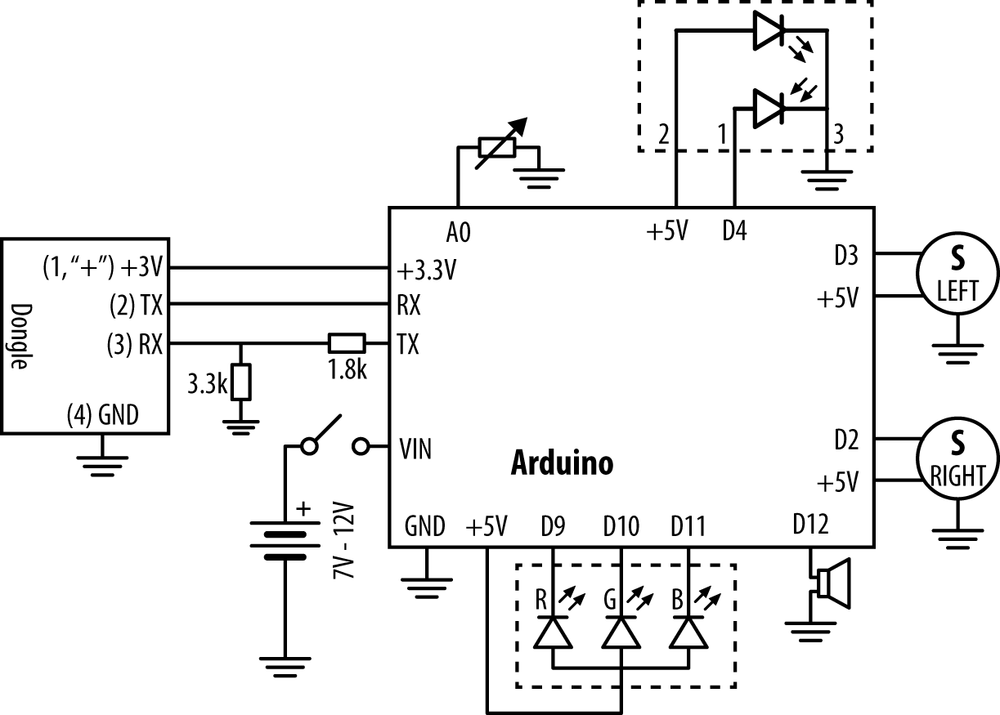
Build the final circuit (Figure 2-33) and upload mindcontrol.pde.
// helloattention.pde - Show attention level (EEG) with LED color.
// (c) Kimmo Karvinen & Tero Karvinen http://MindControl.BotBook.com
/* Disconnect TX and RX jump wires from Arduino when
uploading from IDE.
Turn robot on, then in a couple of seconds turn headband on.
*/
const int redPin = 9;
const int greenPin = 10;
const int bluePin = 11;
const int tinyLedPin = 13;
const int speakerPin = 12;
const int servoRightPin = 2;
const int servoLeftPin = 3;
const int linePin = 4;
const int potPin = A0;
const float potMin = 14.0 - 1;
const float potMax = 236.0 - 5;
int tinyLedState = HIGH;
// percent variables, 0.0 to 1.0:
float tr = -1.0;
float attention = 0;
float speed = 0.0;
void setup()
{
pinMode(redPin, OUTPUT);
pinMode(greenPin, OUTPUT);
pinMode(bluePin, OUTPUT);
pinMode(tinyLedPin, OUTPUT);
pinMode(speakerPin, OUTPUT);
pinMode(servoRightPin, OUTPUT);
pinMode(servoLeftPin, OUTPUT);
pinMode(linePin, INPUT);
pinMode(potPin, INPUT);
digitalWrite(potPin, HIGH); // internal pullup
Serial.begin(115200); // bit/s
connectHeadset();
}
void loop()
{
while (lineDetected()) turn();
updateAttention(); //  tr = getThreshold(); //
tr = getThreshold(); //  if (attention > 0)
setBlueToRed(attention);
if (attention > tr) {
speed = attention; //
if (attention > 0)
setBlueToRed(attention);
if (attention > tr) {
speed = attention; //  } else {
speed = speed * 0.98; //
} else {
speed = speed * 0.98; //  }
forward(speed); //
}
forward(speed); //  toggleTinyLed();
}
float getThreshold()
{
int x = analogRead(potPin);
return (x - potMin) / potMax;
}
/*** Input: Other ***/
bool lineDetected()
{
return !digitalRead(linePin);
}
/*** Input: Headset ***/
void connectHeadset()
{
setGreen();
delay(3000);
Serial.write(0xc2);
attention = 0;
setWhite();
}
byte ReadOneByte()
{
while (!Serial.available()) { }
return Serial.read();
}
float updateAttention()
{
byte generatedChecksum = 0;
byte checksum = 0;
int payloadLength = 0;
byte payloadData[64] = { 0 };
int poorQuality = 0;
while ((170 != ReadOneByte()) && (0 < Serial.available())) {
smartFlush(); //
toggleTinyLed();
}
float getThreshold()
{
int x = analogRead(potPin);
return (x - potMin) / potMax;
}
/*** Input: Other ***/
bool lineDetected()
{
return !digitalRead(linePin);
}
/*** Input: Headset ***/
void connectHeadset()
{
setGreen();
delay(3000);
Serial.write(0xc2);
attention = 0;
setWhite();
}
byte ReadOneByte()
{
while (!Serial.available()) { }
return Serial.read();
}
float updateAttention()
{
byte generatedChecksum = 0;
byte checksum = 0;
int payloadLength = 0;
byte payloadData[64] = { 0 };
int poorQuality = 0;
while ((170 != ReadOneByte()) && (0 < Serial.available())) {
smartFlush(); //  }
if (170 != ReadOneByte()) return -1; //
}
if (170 != ReadOneByte()) return -1; //  /* Length */
payloadLength = ReadOneByte();
if (payloadLength > 169)
return -2;
/* Checksum */
generatedChecksum = 0;
for (int i = 0; i < payloadLength; i++) {
payloadData[i] = ReadOneByte(); // Read payload into array
generatedChecksum += payloadData[i];
}
generatedChecksum = 255 - generatedChecksum;
checksum = ReadOneByte();
if (checksum != generatedChecksum) {
return -3;
}
/* Analyse payload */
for (int i = 0; i < payloadLength; i++) {
switch (payloadData[i]) {
case 0xD0:
sayHeadsetConnected();
break;
case 4:
i++;
attention = payloadData[i] / 100.0; //
/* Length */
payloadLength = ReadOneByte();
if (payloadLength > 169)
return -2;
/* Checksum */
generatedChecksum = 0;
for (int i = 0; i < payloadLength; i++) {
payloadData[i] = ReadOneByte(); // Read payload into array
generatedChecksum += payloadData[i];
}
generatedChecksum = 255 - generatedChecksum;
checksum = ReadOneByte();
if (checksum != generatedChecksum) {
return -3;
}
/* Analyse payload */
for (int i = 0; i < payloadLength; i++) {
switch (payloadData[i]) {
case 0xD0:
sayHeadsetConnected();
break;
case 4:
i++;
attention = payloadData[i] / 100.0; //  break;
case 2:
i++;
poorQuality = payloadData[i];
if (170 < poorQuality) { // max 200
setYellow();
attention = 0.0;
return -4;
}
break;
case 0xD1: // Headset Not Found
case 0xD2: // Headset Disconnected
case 0xD3: // Request Denied
case -70:
wave(speakerPin, 900, 500);
attention = 0.0;
setWhite();
return -5;
break;
case 0x80:
i = i + 3;
break;
case 0x83:
i = i + 25;
break;
} // switch
} // for
}
void smartFlush()
{
if (128 / 2 < Serial.available()) { // buffer is 128 B //
break;
case 2:
i++;
poorQuality = payloadData[i];
if (170 < poorQuality) { // max 200
setYellow();
attention = 0.0;
return -4;
}
break;
case 0xD1: // Headset Not Found
case 0xD2: // Headset Disconnected
case 0xD3: // Request Denied
case -70:
wave(speakerPin, 900, 500);
attention = 0.0;
setWhite();
return -5;
break;
case 0x80:
i = i + 3;
break;
case 0x83:
i = i + 25;
break;
} // switch
} // for
}
void smartFlush()
{
if (128 / 2 < Serial.available()) { // buffer is 128 B //  Serial.flush();
}
}
/*** Outputs: Servos ***/
void forward(float speed)
{
if (speed <= 0)
return;
for (int i = 0; i < 2; i++) {
pulseServo(servoLeftPin, 1500 + 500 * speed);
pulseServo(servoRightPin, 1500 - 500 * speed);
}
}
void turn()
{
for (int i = 0; i < 20; i++) {
pulseServo(servoLeftPin, 1500 + 500);
pulseServo(servoRightPin, 1500 + 500);
}
}
void pulseServo(int pin, int microseconds)
{
digitalWrite(pin, HIGH);
delayMicroseconds(microseconds);
digitalWrite(pin, LOW);
updateAttention(); //
Serial.flush();
}
}
/*** Outputs: Servos ***/
void forward(float speed)
{
if (speed <= 0)
return;
for (int i = 0; i < 2; i++) {
pulseServo(servoLeftPin, 1500 + 500 * speed);
pulseServo(servoRightPin, 1500 - 500 * speed);
}
}
void turn()
{
for (int i = 0; i < 20; i++) {
pulseServo(servoLeftPin, 1500 + 500);
pulseServo(servoRightPin, 1500 + 500);
}
}
void pulseServo(int pin, int microseconds)
{
digitalWrite(pin, HIGH);
delayMicroseconds(microseconds);
digitalWrite(pin, LOW);
updateAttention(); //  }
/*** Outputs: LED ***/
void setBlueToRed(float redPercent)
{
int red = redPercent * 255;
int blue = (1 - redPercent) * 255;
setColor(red, 0, blue);
}
void setGreen()
{
setColor(0, 255, 0);
}
void setYellow()
{
setColor(255, 255, 0);
}
void setWhite()
{
setColor(100, 100, 100);
}
void setColor(int red, int green, int blue)
{
analogWrite(redPin, 255 - red);
analogWrite(greenPin, 255 - green);
analogWrite(bluePin, 255 - blue);
}
void toggleTinyLed()
{
tinyLedState = !tinyLedState;
digitalWrite(tinyLedPin, tinyLedState);
}
/*** Outputs: Speaker ***/
void sayHeadsetConnected()
{
wave(speakerPin, 440, 40);
delay(25);
wave(speakerPin, 300, 20);
wave(speakerPin, 540, 40);
delay(25);
wave(speakerPin, 440, 20);
wave(speakerPin, 640, 40);
delay(25);
wave(speakerPin, 540, 40);
delay(25);
}
void wave(int pin, float frequency, int duration)
{
float period = 1 / frequency * 1000 * 1000; // microseconds
long int startTime = millis();
while (millis() - startTime < duration) {
digitalWrite(pin, HIGH);
delayMicroseconds(period / 2);
digitalWrite(pin, LOW);
delayMicroseconds(period / 2);
}
}
}
/*** Outputs: LED ***/
void setBlueToRed(float redPercent)
{
int red = redPercent * 255;
int blue = (1 - redPercent) * 255;
setColor(red, 0, blue);
}
void setGreen()
{
setColor(0, 255, 0);
}
void setYellow()
{
setColor(255, 255, 0);
}
void setWhite()
{
setColor(100, 100, 100);
}
void setColor(int red, int green, int blue)
{
analogWrite(redPin, 255 - red);
analogWrite(greenPin, 255 - green);
analogWrite(bluePin, 255 - blue);
}
void toggleTinyLed()
{
tinyLedState = !tinyLedState;
digitalWrite(tinyLedPin, tinyLedState);
}
/*** Outputs: Speaker ***/
void sayHeadsetConnected()
{
wave(speakerPin, 440, 40);
delay(25);
wave(speakerPin, 300, 20);
wave(speakerPin, 540, 40);
delay(25);
wave(speakerPin, 440, 20);
wave(speakerPin, 640, 40);
delay(25);
wave(speakerPin, 540, 40);
delay(25);
}
void wave(int pin, float frequency, int duration)
{
float period = 1 / frequency * 1000 * 1000; // microseconds
long int startTime = millis();
while (millis() - startTime < duration) {
digitalWrite(pin, HIGH);
delayMicroseconds(period / 2);
digitalWrite(pin, LOW);
delayMicroseconds(period / 2);
}
}-
updateAttention()now updates the global variableattention. This makes it possible to callupdateAttention()in any part of our code, such as when sending pulses to servos. It doesn’t return a value likegetAttention()in helloattention.-
Attention threshold is the minimum attention where the bot moves. This makes it much clearer to test subjects that they can start and stop moving with the power of their minds. Threshold is set with the small potentiometer.
-
If there is enough attention, that will be our speed. 50% attention means 50% of maximum speed.
-
Attention is too low, so slow down as if the robot were heavy. It loses 2% of speed in every iteration of
loop(). Feel free to try other values.-
Moving forward uses a floating point percentage (0.0 to 1.0), the same range as attention and threshold. There is no hurry returning from forward, because we call
updateAttention()frompulseServo(), the low-level command called byforward().-
Skip until we get to the beginning of NeuroSky packet, marked by sync sequence start 170. The function
smartFlush()only flushes the buffer if it’s near overflow.-
The second byte of sync sequence 170 170.
-
Update global variable attention. This is the main purpose of
updateAttention().-
The buffer is 128 bytes. We can’t let it overflow, as that seems to crash the bot. But we want to catch up to whatever messages came while we were busy moving servos. So we only flush (delete the contents of) the buffer if it’s half full. The 50% fill value was found by experimentation.
-
We can move servos for two minutes if we want to. This is very useful if you want to add preprogrammed sequences, such as long turns or more obstacle avoidance. The attention value will be updated and the serial buffer kept away from overflow. Feel free to put
updateAttention()in any of your own functions.
Congratulations! You’ve now finished your mind-controlled robot!
This is not the end, this is the beginning. What’s the next mind-controlled project in your mind?
See you at http://BotBook.com!