
2
Technological Systems
2.1. Introduction
In this chapter, we will present technological systems as concrete objects with general characteristics of all concrete systems, as well as characteristics that are specific to them. Technological systems will be characterized as human creations, designed and developed on the basis of a usefulness (i.e. not for themselves but with an external purpose) and available scientific and technical knowledge. This will allow us to introduce, alongside general concepts of property, behavior and state, specific concepts of technological systems such as function, concomitant effect, mode, error, fault and failure that are necessary to define engineering processes of technological systems.
2.2. Definition of technological systems
The standard ISO 15288 [ISO 05] defines the systems of interest as systems produced by humans, created and used to provide services in defined environments to benefit its users and other stakeholders. This definition states that systems with which systems engineering is concerned are artificial systems, designed and produced by humans. For this reason, these are systems orientated toward a determined objective (to provide services in defined environments to benefit its users and other involved stakeholders1). This, therefore, introduces two important differences compared with natural systems, whose genesis and dynamics are linked to the evolution of the universe and to which it is impossible to assign an aim (“no plastic brain, no teleology” [MAH 97]). As emphasized by Bertalanffy, there are two possible and equivalent scientific descriptions to the evolution of concrete systems: the first one by the initial and boundary conditions, and the second one by the end conditions [BER 69] (for example, due to the Maupertuis principle). This is true for all concrete systems, including biological systems [MAH 97]. The reason why one is preferred over the other is only due to convenience, even if the second has extra-scientific connotations.
Figure 2.1. Artificial systems
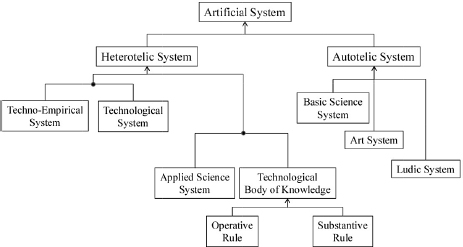
2.2.1. Artificial autotelic and heterotelic systems
Among the artificial systems that humans can create, we can see that the systems of interest, mentioned in ISO15288, have a purpose, just like any artificial system; but in this case, this purpose is external to the system itself.
Autotelic systems: in other cases, this purpose is the system itself. For example, the purpose of a system of signs, such as Homer’s Odyssey or the theory of functions of the complex variable of G. Riemann, is only the system itself. In particular, this is what has led us to consider that basic sciences, like some other cultural productions, were public goods [MER 42] (at the opposite of antiscientific theses such as “science is politics by other means”2). This includes autotelic systems, i.e. whose purpose (teleology) is the system itself, such as works of art, games or fundamental sciences.
Heterotelic systems: however, the systems of interest mentioned in ISO15288 are heterotelic systems, i.e. whose purpose is external to the systems themselves.
2.2.2. Technical-empirical and technological systems
However, one feature of system of interest seems to have escaped the ISO15288 definition, namely the systems with which systems engineering is concerned, and ISO15288 in particular, are not any heterotelic systems. ISO15288 rightly excludes technical-empirical systems (but does not justify this exclusion), that is to say, empirically based technical systems produced since ancient times by humans. As the philosopher Alain stated, “the technique (is) a kind of thinking that is applied to the action itself and is improved by continuous trial and error”3. Hydraulic systems, such as Roman aqueducts with siphons, described by Vitruvius4, have been constructed by engineers with incomparable expertise and experience, before Heron of Alexandria5 discovered the principles of mass and momentum conservation that are included in the technological and non-empirical design of this type of work.
Unlike empirical systems, technological systems with which systems engineering is concerned, are systems that are, as Bunge emphasizes, systems designed and produced conforming to law statements and laws of applied science and contemporary technology. It is, therefore, possible to develop space systems, to evaluate their behavior in environment in which they will have to evolve, and to launch them into space with a reasonably low risk of failure. In other words, technological systems are materializations of applied sciences and technology, i.e. “a state of capacity to make, involving a true course of reasoning” [ARI 99].
2.2.3. Purpose of a technological system
If we now consider the purpose of a technological or an empirical-technical system, we find that this purpose is to change the state of the world or, in other words, to modify the environment of the desired system to be build. As N. Roozenburg noted, operating a technological system (or an empirico-technical system) consists of modifying the state of its environment according to the purpose of the system (which is external). For example, if this is an aqueduct, the purpose is to bring water to a town without water (by transporting it from a distant place where it is abundant). If it is a civilian aircraft, the purpose is to transport people or merchandises by airways from one location to another.
Figure 2.2. Structure of technological system design
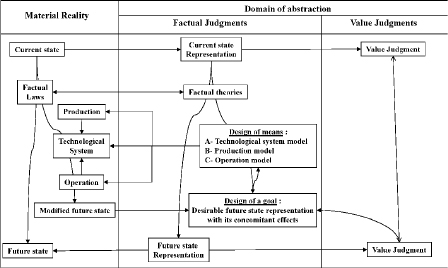
Inspired by a figure presented by Roozenburg and Eeekels in their work [ROO 91, p. 11], and adapted above, we represent the design process of a type of technological systems as below.
Figure 2.2 is presented in three columns. The first column denotes facts (things in a given state, event and process) in the reality, whereas the other two columns are in the abstraction domain (in other words, in the head of different stakeholders). In reality, a current state objectively exists: for example, the presence of an obstacle (for an aircraft) that crosses the trajectory of another aircraft in evolution. This current state will evolve into a future state due to the laws of flight. In this example, the future state corresponds to a collision between these two aircraft. This scenario is not imaginary; it has occurred on several occasions, sometimes leading to catastrophic accidents. Retrospective analysis (abstraction domain) showed that both aircraft passed from a risk situation (judgment of value in a representation of the current state) to a catastrophic situation (judgment of value in a representation of the future state) inexorably given by the aircraft trajectories (physical theories). These accidents have caused the federal aviation administration (FAA) to require devices to be installed on board aircraft helping them to avoid these types of collisions (design of a goal: modified future state) whose solution (design of means) was studied for several years, i.e. a type of technological systems: collision avoidance systems (CAS, transponders in Mode C) that have been produced and installed on board transport aircraft (CAS) and light airplanes (transponders) and that the pilots must learn to operate.
As made explicit by Roozenburg, designing a type of technological systems involves two tasks:
This will be presented in more detail in Part 2 of this book.
2.3. Function, behavior and structure of a technological system
In Chapter 1, we proposed the definition of concrete systems that does not refer to the concept of function, whereas the term “function” is systematically considered as a central concept of engineering and is regularly defined as an “intended effect of a system, of a sub-system of a product or a component” [SSE 14].
If this is so, it is because the systems perform functions for users who give them a use value. This also provides them with an exchange value and, therefore, can be included in an economic system.
In fact, we assert that the concept of function does not belong to the theory of concrete systems overall but only to that of heterotelic systems. Generally speaking, a concrete system Σ does not have a function and natural systems, in particular, does not have functions. The Sun, for example, does have a structure (nucleus, radiation and convection zones in peripheral layers and photosphere) and a behavior (nuclear fusion, convection and radiation to the surroundings), but it does not have a function even if it has an effect upon all the components of the solar system and beyond. It is somewhat imprecise to say that the “function” of the nucleus is to produce energy that will then be radiated by the peripheral layers (photosphere). Natural systems can have interesting or valuable effects, but this is just a coincidence, a golden opportunity.
Figure 2.3. Function-behavior-structure framework
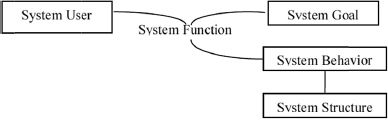
Conversely, heterotelic systems are designed and developed to produce an intended effect in its environment by exploiting a behavioral property of the designed system. This intended effect produced by the behavior of the system and embedded in its structure by its designer forms its function. This is what Hannah Arendt expressed rightfully, when she stated that hitting a nail with a shoe does not make the shoe a hammer [ARE 61], unlike Dori, who considered the function “hammer” of a stone (natural object) in his main book [DOR 02].
To define a function, we will use the conceptual framework proposed by John S. Gero, designed according to function-behavior-structure (FBS), and defined by Gero [GER 90] as:
Therefore, we say that the functions of a system are the effects (intended by its stakeholders) of the interaction of this system with its environment (as Chandrasekaran and Josephson [CHA 00] defined for the function of a device).
One function of a system is the relation between a technological system, its designer who assigns it a purpose and its users who use the system to achieve the desired objective.
ARP4754A (p. 8) is a good example of this, with its definition of a function: “intended behavior of a product based on a defined set of requirements regardless of implementation” (while mentioning the possibility of detecting an unintended function - page 65 - is an antilogy).
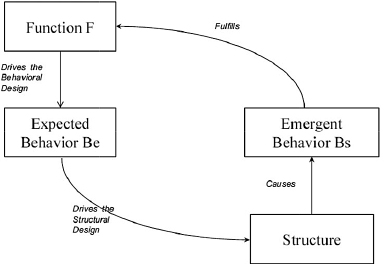
The FBS design framework proposed by J. Gero, which distinguishes between the intended behavior Be of a system Σ, which is the behavior of Σ, conceived to satisfy the intended functions, and the effective (and emergent) behavior Bs of structure S, which is the set of actually possible behaviors, taking into account the structure S of system Σ and the environmental conditions in which Σ is situated.
Figure 2.4 shows the existent relations between:
It is noticeable that no direct relations exist between the functions and the structure, which means that the structure S never directly carries out functions. This is what the “no- function-in-structure” principle expresses (originally by Kleer and Brown [BRO 84]) and is adopted by the research community named “Engineering Design”, of which John Gero is a member.
The “no-function-in-structure” principle results from the following consideration: the structure of an object never directly performs an intended function of this object, whether an electronic video camera or the windscreen of an aircraft. In all cases, the device (structure), whether it is a windscreen or a camera, behaves in such a way that it provides an image of the source by processing it. It is the behavior of the object that performs the function, and this behavior is made possible by the object structure (under determined conditions of use). Therefore, it is the structure of an aircraft (airframe) that determines the way it behaves when subjected to flight loads and ground loads, and what makes it to perform its integrity function6.
Figure 2.4. Function-behavior-structure relationships
2.4. Intended and concomitant effects of a technological system
However, we cannot reduce a technological system to its intended effects i.e. its functions (in fact, its usefulness). This is an important and surprisingly ignored fact7 in many functional analysis manuals.
In fact, technological systems also produce non-desirable effects that we call concomitant effects or even intolerable effects. This is based on the fact that the essential properties of a system are linked with each other by laws, as we have seen in Chapter 1. Thus, mobilizing one of these essential properties of a system, in order to produce an intended effect, inevitably leads to the mobilization of other properties linked to the previous one, which is not necessarily desired.
Using an electric motor, to drive a load, can concomitantly cause the motor and its environment to heat up, eventually reaching unacceptable temperature ranges.
Similarly, to produce heat from nuclear fission reactions, of course, will allow producing electricity downstream, which is the function of a nuclear power plant, but will also concomitantly produce some undesirable effects, which will be prevented and confined.
Thus, the engineering activity cannot be reduced to find an efficient solution to the limited problem of providing the intended effects of a system, but, equally, consists of finding an acceptable solution to the problem caused by the concomitant effects of this system.
To conclude, the intended and concomitant effects are not defined once and for all. If we consider, for example, a conductor carrying an electric current, we name the Joule effect, the heat radiation phenomenon induced by the electrical flow through the conductor. Basically, this effect is neither desirable nor undesirable, but its appeal depends on the context in which it occurs. In the case of a house equipped with electric heaters, the Joule effect is intended, desired by the occupants who want to warm themselves up; in the case where electrical energy is transported in electric cables, the Joule effect is quite on the contrary an undesirable effect, a loss for the operator.
2.5. Modes, mode switching and states
In this section, we define what is meant by a mode, a clearly distinguished concept of that of a state, as well as the relation that they maintain with each other. The aim of this is to clearly provide the basis for a logical representation of a system.
2.5.1. Modes of operation
The operation of a technological system during a time interval Δτ may be divided into exclusive modes of operation during which distinct purposes (functions) are assigned to the system.
In a system, each mode of operation has a specific corresponding behavior, which allows it to meet the objectives associated with this mode. For example, an aircraft automatic pilot, when engaged, functions in different modes during which it carries out specific objectives such as heading holding mode (HDG), altitude holding mode (ALT), etc. A purpose (function) may be specific to a mode; it may also be common to several modes, which then differ by other more specific objectives: its submodes.
2.5.2. Mode switching
A system switches from one mode to another by mode switching. The modes switching can be validly represented using Statechart diagrams, a graphical and typical hierarchical representation of states and transitions between states, provided by Harel [HAR 98]. However, note that, unlike transitions of supposedly instantaneous in the Statecharts representation, the switching between modes often involves complex operations, whose duration cannot be considered as negligible, and which should be constrained in terms of time.
2.5.3. Operating states
By the operating state of a system at a given instant, we mean the value of one or several properties of the system at this instant. For example, we can define the state of balance of an aircraft as being situated in its XY plane. The aircraft is said to be centered when the projection of its center of gravity in XY remains in a polygon established during its design.
For a system to function in a given mode, it may need to be in a particular state; so, mode of operation is linked to the state of operation. Inversely, in a given state, it may not be able to function in a given mode. In this second case, the mode and state of operation are, therefore, incompatible. For example, before an aircraft can take flight, the pilot has to check that it will remain centered (state) during all flight stages (takeoff, climbing, cruising, descent and landing modes) according to the payload (constant) and the fuel load (variable).
Describing a system in terms of states or modes is a dual description. Different operating states of a system correspond to different operating modes, which are mutually involved, or on the contrary, excluded.
For instance, for a fuel system to function in “Feeding” mode, its filling status will be higher than a certain level corresponding to the level of unusable fuel during flight. Similarly, for it to function in “Refueling” mode, its filling status will be lower at a certain level (in theory, full). In the opposite cases, the modes and states are incompatible.
2.6. Errors, faults and failures
When a technological system operates in environmental conditions for which it was designed, a failure occurs when the intended effect is no longer produced on its environment, whether it involves the loss of function or an erroneous functioning.
Moreover, if we analyze the space of states of a technological system, it can be divided into two regions. The first region includes the subspace of well-functioning states, i.e. those for which the technological system has all of its resources and capacities, behaves satisfactorily and consequently provides the intended services.
Figure 2.5. Failure, fault and error
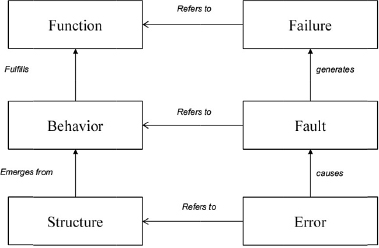
Inversely, the second region includes the subspace of faulty states (states of dysfunction), that is to say, those for which the technological system does not have all resources or all capacities. It then behaves in a faulty manner, but this may not necessarily be visible, according to the external intended behavior. A faulty behavior is a behavior that temporarily or definitively includes faulty states. It is then unable to provide the services intended of it in a more or less short-term.
In agreement with the FBS framework adopted above:
We will describe these aspects in more detail in Part 2 of this book (Chapter 10, section 10.3.1).
2.7. “The human factor”
A technological system may at some point or another in its lifecycle include a human component. This is the case, for example, for aircrew (pilot and copilot) and the passengers of an aircraft when in flight. The crew not only assure the control and monitoring of an aircraft but they also participate, just like the passengers do, in its composition and properties, in particular, of its weight and centering.
These human components of a technological system are characterized by the following:
We consider that these multiple and complex characteristics should make human engineering the focus of technological systems, whereas these disciplines still remain insufficiently integrated.
1An enterprise, organization, or individual having an interest or a stake in the outcome of the engineering of a system. Examples of stakeholders are acquirer, user, customer, manufacturer, installer, tester, maintainer, executive manager, project manager, and all other personnel having a stake in the development or outcome of the engineering of a system. The enterprise as a corporation or agency and the general public are also stakeholders.
2LATOUR B., Science in Action, How to Follow Scientists and Engineers through Society, Harvard University Press, 1987.
3ALAIN, Humanités 1946 in Les passions et la sagesse, Gallimard, La Pléiade, pp. 292-294.
4Vitruvius, Roman architect born around 90 BC and died around 20 BC, deals with the construction of aqueducts and syphons in De architectura, written around 25 BC.
5Heron of Alexandria: Greek engineer, mechanic and mathematician of the 1st Century AD
6The integrity function of a system Σ is often performed by a static subsystem of Σ.
7Note that Vladimir Hubka, who in his theory of technical systems (p. 48) introduced the concept of secondary output to account for undesirable effects, is an exception to this generality.