
14
Homotopy Analysis Method
14.1 Introduction
Homotopy analysis method (HAM) [1–7] is one of the well‐known semi‐analytical methods for solving various types of linear and nonlinear differential equations (ordinary as well as partial). This method is based on coupling of the traditional perturbation method and homotopy in topology. By this method one may get exact solution or a power series solution which converges in general to exact solution. The HAM consists of parameter ℏ ≠ 0 called as convergence control parameter, which controls the convergent region and rate of convergence of the series solution. This method was first proposed by Liao [4]. The same was successfully employed to solve many types of problems in science and engineering [ 1 –8] and the references mentioned therein.
14.2 HAM Procedure
To illustrate the idea of HAM, we consider the following differential equation 1– 7 ] in general
where N is the operator (linear or nonlinear) and u is the unknown function in the domain Ω.
The method begins by defining homotopy operator H as below [7] ,
where p ∈ [0, 1] is an embedding parameter and ℏ ≠ 0 is the convergence control parameter [3, 7 ], u0 is an initial approximation of the solution of Eq. (14.1), φ is an unknown function, and L is the auxiliary linear operator satisfying the property L(0) = 0.
By considering H(φ, p) = 0, we obtain
which is called the zero‐order deformation equation.
From Eq. (14.3), it is clear that for p = 0 we get L(φ(x, t; 0)) − u0(x, t) = 0 that gives φ(x; 0) = u0(x, t). On the other hand, for p = 1, Eq. ( 14.3 ) reduces to N(φ(x, t; p)) = 0 which gives φ(x, t; 1) = u(x). So, by changing p from 0 to 1 the solution changes from u0 to u.
Using Maclaurin series, the function φ(x, t; p) with parameter p may be written as [7]

Denoting

Eq. (14.4) turns into

If the series (14.6) converges for p = 1 [7] , then we obtain the solution of Eq. ( 14.1 ) as

In order to determine the function um, we differentiate Eq. ( 14.3 ), m times with respect to p. Next we divide the result by m! and substitute p = 0 [7] . In this way we may find the mth‐order deformation equation for m > 0 as below [7]
where H(x, t) is the auxiliary function,  and
and

14.3 Numerical Examples
Here, we apply the present method to solve a linear partial differential equation in Example 14.1 and a nonlinear partial differential equation in Example 14.2.

Figure 14.1 Solution of Eq. ( 14.10 ) for different values of ℏ at t = 1.
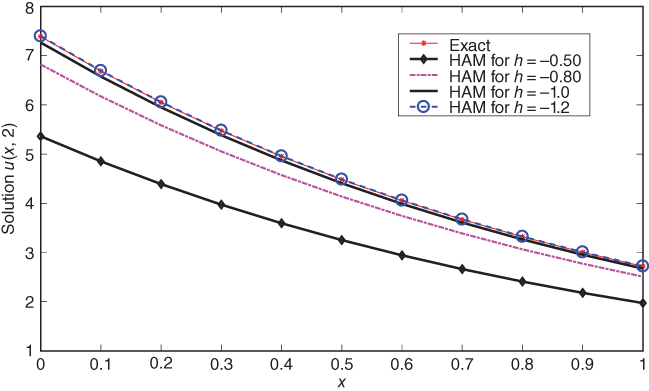
Figure 14.2 Solution of Eq. ( 14.10 ) for different values of ℏ at t = 2.
Exercise
- 1
Apply the HAM to find the solution of the partial differential equation
 , subject to the initial condition u(x, 0) = 0.
, subject to the initial condition u(x, 0) = 0. - 2
Find the solution of ut + uut = x2 subject to
 .
.
References
- 1 Wazwaz, A.M. (2008). A study on linear and nonlinear Schrodinger equations by the variational iteration method. Chaos, Solitons and Fractals 37 (4): 1136–1142.
- 2 Song, L. and Zhang, H. (2007). Application of homotopy analysis method to fractional KdV–Burgers–Kuramoto equation. Physics Letters A 367 (1): 88–94.
- 3 Liao, S. (2004). On the homotopy analysis method for nonlinear problems. Applied Mathematics and Computation 147 (2): 499–513.
- 4 Liao, S. (2012). Homotopy Analysis Method in Nonlinear Differential Equations, 153–165. Beijing: Higher Education Press.
- 5 Liang, S. and Jeffrey, D.J. (2009). Comparison of homotopy analysis method and homotopy perturbation method through an evolution equation. Communications in Nonlinear Science and Numerical Simulation 14 (12): 4057–4064.
- 6 Abbasbandy, S. (2006). The application of homotopy analysis method to nonlinear equations arising in heat transfer. Physics Letters A 360 (1): 109–113.
- 7 Hetmaniok, E., Słota, D., Trawiński, T., and Wituła, R. (2014). Usage of the homotopy analysis method for solving the nonlinear and linear integral equations of the second kind. Numerical Algorithms 67 (1): 163–185.
- 8 Liao, S.J., 1992. The proposed homotopy analysis technique for the solution of nonlinear problems. Doctoral dissertation, PhD thesis, Shanghai Jiao Tong University.
- 9 Wazwaz, A.M. (2010). Partial Differential Equations and Solitary Waves Theory. Beijing: Springer Science & Business Media, Higher Education Press.